Διαχειριστής
18702
Για να κατανοήσουμε τις αρχές λειτουργίας του διαύλου CAN, αποφασίσαμε να γράψουμε/μεταφράσουμε μια σειρά άρθρων για αυτό το θέμα, ως συνήθως, με βάση υλικά από ξένες πηγές.
Μία από αυτές τις πηγές, η οποία, όπως μας φάνηκε, επεξηγεί πολύ σωστά τις αρχές του διαύλου CAN, ήταν μια παρουσίαση βίντεο του εκπαιδευτικού προϊόντος CANBASIC από την Igendi Engineering (http://canbasic.com).
Καλώς ήρθατε στην παρουσίαση του νέου προϊόντος CANBASIC, ενός εκπαιδευτικού συστήματος (πίνακα) αφιερωμένο στη λειτουργία του διαύλου CAN.
Θα ξεκινήσουμε με τα βασικά της δημιουργίας ενός δικτύου διαύλου CAN. Το διάγραμμα δείχνει ένα αυτοκίνητο με το σύστημα φωτισμού του.

Εμφανίζεται η τυπική καλωδίωση με κάθε λαμπτήρα απευθείας συνδεδεμένο σε κάποια επαφή διακόπτη ή πεντάλ φρένου.

Τώρα παρόμοια λειτουργικότητα εμφανίζεται χρησιμοποιώντας την τεχνολογία CAN bus. Οι μπροστινές και οι πίσω συσκευές φωτισμού συνδέονται σε μονάδες ελέγχου. Οι μονάδες ελέγχου συνδέονται παράλληλα με τα ίδια καλώδια διαύλου.

Αυτό το μικρό παράδειγμα δείχνει ότι η ποσότητα της ηλεκτρικής καλωδίωσης μειώνεται. Επιπλέον, οι μονάδες ελέγχου μπορούν να ανιχνεύσουν καμένες λάμπες και να ενημερώσουν τον οδηγό σχετικά.
Το αυτοκίνητο στην εικόνα που φαίνεται περιέχει τέσσερις μονάδες ελέγχου και αντικατοπτρίζει ξεκάθαρα την κατασκευή του συστήματος εκπαίδευσης CANBASIC (σανίδα)

Στα παραπάνω υπάρχουν τέσσερις κόμβοι διαύλου (CAN nodes).
Η μπροστινή μονάδα ελέγχει τα μπροστινά φώτα.
Η μονάδα συναγερμού παρέχει έλεγχο του εσωτερικού του οχήματος.
Η κύρια μονάδα ελέγχου συνδέει όλα τα συστήματα του οχήματος για διαγνωστικά.
Το πίσω συγκρότημα ελέγχει τα πίσω φώτα.
Στον πίνακα εκπαίδευσης CANBASIC μπορείτε να δείτε τη δρομολόγηση (τοποθεσία) τριών σημάτων: "Power", "CAN-Hi" και "ground", που συνδέονται στη μονάδα ελέγχου.

Στα περισσότερα οχήματα, χρειάζεστε έναν μετατροπέα OBD-USB για να συνδέσετε την κύρια μονάδα ελέγχου σε έναν υπολογιστή χρησιμοποιώντας διαγνωστικό λογισμικό.

Η πλακέτα CANBASIC περιέχει ήδη έναν μετατροπέα OBD-USB και μπορεί να συνδεθεί απευθείας σε υπολογιστή.
Η πλακέτα τροφοδοτείται από μια διασύνδεση USB, επομένως δεν χρειάζονται πρόσθετα καλώδια.

Τα καλώδια διαύλου χρησιμοποιούνται για τη μετάδοση μιας ποικιλίας δεδομένων. Πως δουλεύει?
Πώς λειτουργεί το λεωφορείο CAN;
Αυτά τα δεδομένα μεταδίδονται σειριακά. Εδώ είναι ένα παράδειγμα.
Ο άνθρωπος με τη λάμπα, ο πομπός, θέλει να στείλει κάποια πληροφορία στον άνθρωπο με το τηλεσκόπιο, τον δέκτη (δέκτη). Θέλει να μεταφέρει δεδομένα.

Για να γίνει αυτό, συμφώνησαν ότι ο παραλήπτης θα ελέγχει την κατάσταση της λάμπας κάθε 10 δευτερόλεπτα.

Μοιάζει με αυτό:



Μετά από 80 δευτερόλεπτα:

Τώρα έχουν μεταφερθεί 8 bit δεδομένων με ρυθμό 0,1 bit ανά δευτερόλεπτο (δηλαδή 1 bit κάθε 10 δευτερόλεπτα). Αυτό ονομάζεται σειριακή μετάδοση δεδομένων.

Για να χρησιμοποιήσετε αυτήν την προσέγγιση σε μια εφαρμογή αυτοκινήτου, το χρονικό διάστημα μειώνεται από 10 δευτερόλεπτα σε 0,000006 δευτερόλεπτα. Για τη μετάδοση πληροφοριών αλλάζοντας το επίπεδο τάσης στο δίαυλο δεδομένων.

Ένας παλμογράφος χρησιμοποιείται για τη μέτρηση των ηλεκτρικών σημάτων του διαύλου CAN. Δύο τακάκια μέτρησης στην πλακέτα CANBASIC σας επιτρέπουν να μετρήσετε αυτό το σήμα.

Για να εμφανιστεί το πλήρες μήνυμα CAN, η ανάλυση του παλμογράφου μειώνεται.

Ως αποτέλεσμα, μεμονωμένα bit CAN δεν μπορούν πλέον να αναγνωριστούν. Για την επίλυση αυτού του προβλήματος, η μονάδα CANBASIC είναι εξοπλισμένη με ψηφιακό παλμογράφο αποθήκευσης.
Εισάγουμε τη μονάδα CANBASIC σε μια ελεύθερη υποδοχή USB, μετά την οποία θα εντοπιστεί αυτόματα. Το λογισμικό CANBASIC μπορεί να ξεκινήσει αμέσως.
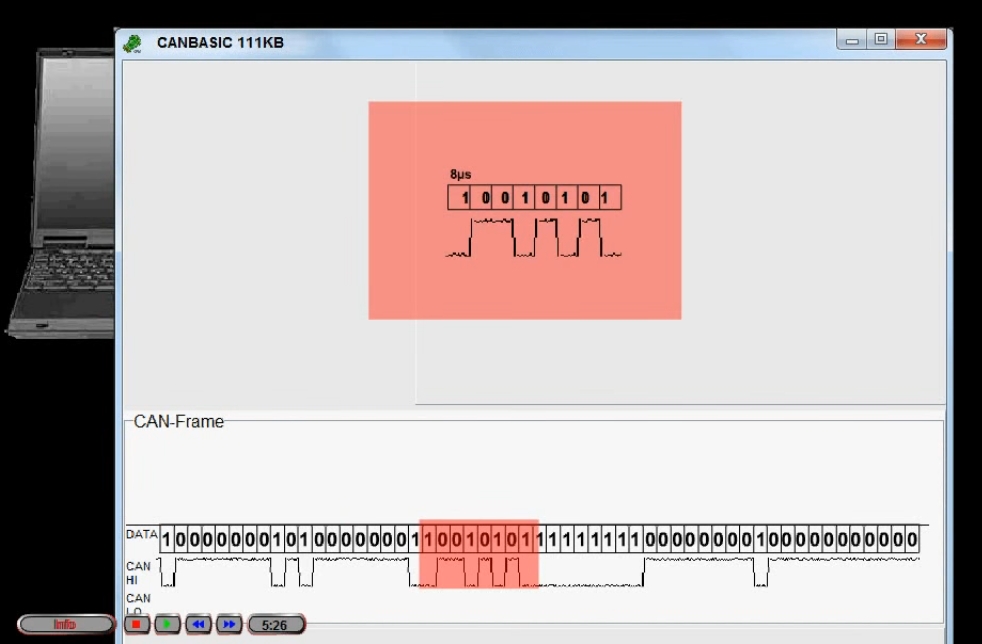
Μπορείτε να δείτε την προβολή παλμογράφου λογισμικού με συνημμένες τις τιμές bit. Το κόκκινο δείχνει τα δεδομένα που μεταφέρθηκαν στο προηγούμενο παράδειγμα.
Για να εξηγήσουμε άλλα μέρη του μηνύματος CAN, χρωματίζουμε το πλαίσιο CAN και επισυνάπτουμε περιγραφές σε αυτό.

Κάθε έγχρωμο τμήμα του μηνύματος CAN αντιστοιχεί σε ένα πεδίο εισαγωγής του ίδιου χρώματος. Η περιοχή που επισημαίνεται με κόκκινο περιέχει πληροφορίες δεδομένων χρήστη, οι οποίες μπορούν να καθοριστούν σε bits, nibbles ή δεκαεξαδική μορφή.
Η κίτρινη περιοχή καθορίζει τον όγκο των δεδομένων χρήστη. Ένα μοναδικό αναγνωριστικό μπορεί να οριστεί στην πράσινη ζώνη.
Η μπλε περιοχή σάς επιτρέπει να ορίσετε το μήνυμα CAN για το απομακρυσμένο αίτημα. Αυτό σημαίνει ότι θα αναμένεται απόκριση από έναν άλλο κόμβο CAN. (Οι ίδιοι οι προγραμματιστές συστημάτων συνιστούν να μην χρησιμοποιείτε απομακρυσμένα αιτήματα για διάφορους λόγους που οδηγούν σε δυσλειτουργίες του συστήματος, αλλά αυτό θα συζητηθεί σε άλλο άρθρο.)
Πολλά συστήματα διαύλου CAN προστατεύονται από παρεμβολές από ένα δεύτερο κανάλι CAN-LO για μετάδοση δεδομένων, το οποίο είναι ανεστραμμένο σε σχέση με το σήμα CAN-HI (δηλαδή, αποστέλλεται το ίδιο σήμα, μόνο με το αντίθετο πρόσημο).

Έξι διαδοχικά bit με το ίδιο επίπεδο ορίζουν το τέλος του πλαισίου CAN.

Συμπτωματικά, άλλα μέρη του πλαισίου CAN μπορεί να περιέχουν περισσότερα από πέντε διαδοχικά bit με το ίδιο επίπεδο.

Για να αποφευχθεί αυτό το σημάδι bit, εάν εμφανιστούν πέντε διαδοχικά bit του ίδιου επιπέδου, το αντίθετο bit εισάγεται στο τέλος του πλαισίου CAN. Αυτά τα bits ονομάζονται bits προσωπικού (σκουπίδια). Οι δέκτες CAN (δέκτες σήματος) αγνοούν αυτά τα bit.

Χρησιμοποιώντας τα πεδία εισαγωγής, μπορούν να καθοριστούν όλα τα δεδομένα ενός πλαισίου CAN και επομένως μπορεί να σταλεί κάθε μήνυμα CAN.
Τα εισαγόμενα δεδομένα ενημερώνονται αμέσως στο πλαίσιο CAN, σε αυτό το παράδειγμα το μήκος των δεδομένων θα αλλάξει από ένα byte σε 8 byte και θα μετατοπιστεί πίσω κατά ένα byte.

Το κείμενο περιγραφής υποδεικνύει ότι το φλας θα ελέγχεται χρησιμοποιώντας το αναγνωριστικό "2C1" και τα bit δεδομένων 0 και 1. Όλα τα bit δεδομένων επαναφέρονται στο 0.

Το αναγνωριστικό ορίζεται στην τιμή ""2С1". Για να ενεργοποιήσετε το φλας, το bit δεδομένων πρέπει να ρυθμιστεί από 0 έως 1.

Στην εσωτερική λειτουργία, μπορείτε να ελέγξετε ολόκληρη τη μονάδα με απλά κλικ του ποντικιού. Τα δεδομένα CAN ρυθμίζονται αυτόματα σύμφωνα με την επιθυμητή ενέργεια.
Τα φλας μπορούν να ρυθμιστούν στη μεσαία σκάλα για να λειτουργούν ως DRL. Η φωτεινότητα θα ελέγχεται με διαμόρφωση πλάτους παλμού (PWM), σύμφωνα με τις δυνατότητες της σύγχρονης τεχνολογίας διόδων.
Τώρα μπορούμε να ενεργοποιήσουμε τα φώτα μεσαίας σκάλας, τα φώτα ομίχλης, τα φώτα φρένων και τα φώτα μεγάλης σκάλας.

Όταν σβήσει η μεσαία σκάλα, σβήνουν και τα φώτα ομίχλης. Η λογική ελέγχου του συστήματος φωτισμού CANBASIC αντιστοιχεί στα οχήματα της Volkswagen. Περιλαμβάνονται επίσης χαρακτηριστικά ανάφλεξης και "επιστροφής στο σπίτι".
Με έναν κόμβο σήματος, μπορείτε να διαβάσετε το σήμα του αισθητήρα μετά από ένα απομακρυσμένο αίτημα εκκίνησης.
Στη λειτουργία απομακρυσμένου αιτήματος, το δεύτερο πλαίσιο CAN θα ληφθεί και θα εμφανιστεί κάτω από το απεσταλμένο πλαίσιο CAN.

Το byte δεδομένων CAN περιέχει τώρα το αποτέλεσμα της μέτρησης του αισθητήρα. Καθώς πλησιάζετε το δάχτυλό σας στον αισθητήρα, μπορείτε να αλλάξετε τη μετρούμενη τιμή.

Το πλήκτρο παύσης παγώνει το τρέχον πλαίσιο CAN και επιτρέπει την ακριβή ανάλυση.
Όπως έχει ήδη φανεί, διάφορα μέρη του πλαισίου CAN μπορούν να κρυφτούν.

Επιπλέον, υποστηρίζεται η απόκρυψη κάθε bit στο πλαίσιο CAN.
Αυτό είναι πολύ χρήσιμο εάν θέλετε να χρησιμοποιήσετε την αναπαράσταση πλαισίου CAN στα δικά σας έγγραφα, όπως ένα φύλλο ασκήσεων.
Διαγνωστικά και επισκευή: CAN bus
21.02.2006
Αυτό ακριβώς μοιάζει με αυτό το "λάστιχο" (κυρίως)ΜΠΟΡΩ », με το οποίο έχουμε να αντιμετωπίσουμε πρόσφατα όλο και πιο συχνά:
φωτογραφία 1
Αυτό είναι ένα συνηθισμένο καλώδιο δύο συρμάτων που ονομάζεται Twisted Pair .
Η φωτογραφία 1 δείχνει τα καλώδια CAN High και CAN Low της μονάδας ισχύος.
Αυτά τα καλώδια χρησιμοποιούνται για την ανταλλαγή δεδομένων μεταξύ των μονάδων ελέγχου· μπορούν να μεταφέρουν πληροφορίες σχετικά με την ταχύτητα του οχήματος, την ταχύτητα περιστροφής του στροφαλοφόρου άξονα, το χρονισμό ανάφλεξης και ούτω καθεξής.
Λάβετε υπόψη ότι ένα από τα καλώδια επισημαίνεται επιπλέον με μια μαύρη λωρίδα. Έτσι επισημαίνεται και προσδιορίζεται οπτικά το σύρμα CAN High (πορτοκαλί-μαύρο).
Χρώμα σύρματος CAN-Χαμηλό - πορτοκαλί-καφέ.
Για το κύριο χρώμα του ελαστικούΜΠΟΡΩ το πορτοκαλί χρώμα γίνεται δεκτό.
Σε εικόνες και σχέδια είναι συνηθισμένο να απεικονίζονται τα χρώματα των καλωδίων του διαύλουΜΠΟΡΩ άλλα χρώματα και συγκεκριμένα:

φωτογραφία 2
CAN-Υψηλό - κίτρινο
CAN-Χαμηλό - πράσινο
Υπάρχουν διάφοροι τύποι ελαστικώνΜΠΟΡΩ , καθορίζεται από τις λειτουργίες που εκτελούν:
Δίαυλος μετάδοσης κίνησης CAN(γρήγορο κανάλι) .
Το επιτρέπειμεταδίδει πληροφορίες με ταχύτητα 500 kbit/s και χρησιμοποιείται για την επικοινωνία μεταξύ των μονάδων ελέγχου (κινητήρας - κιβώτιο ταχυτήτων)
Comfort CAN λεωφορείο(αργό κανάλι) .
Το επιτρέπειμεταδίδει πληροφορίες με ταχύτητα 100 kbit/s και χρησιμοποιείται για την επικοινωνία μεταξύ των μονάδων ελέγχου που περιλαμβάνονται στο σύστημα Comfort.
Σύστημα πληροφοριών και εντολών Δίαυλος δεδομένων CAN(αργό κανάλι), που επιτρέπει τη μετάδοση δεδομένων με ταχύτητα 100 kBit/s. Παρέχει επικοινωνίαμεταξύ διαφορετικών συστημάτων υπηρεσιών (για παράδειγμα, συστήματα τηλεφώνου και πλοήγησης).
Τα νέα μοντέλα αυτοκινήτων μοιάζουν όλο και περισσότερο με αεροπλάνα - όσον αφορά τον αριθμό των δηλωμένων λειτουργιών για ασφάλεια, άνεση και φιλικότητα προς το περιβάλλον. Υπάρχουν ολοένα και περισσότερες μονάδες ελέγχου και δεν είναι ρεαλιστικό να "τραβάς" από κάθε δέσμη καλωδίων.
Επομένως, εκτός από το ελαστικόΜΠΟΡΩ Υπάρχουν ήδη άλλα ελαστικά που ονομάζονται:
– Δίαυλος LIN (διαύλου μονού καλωδίου)
– MOST bus (δίαυλος οπτικών ινών)
– Ασύρματο λεωφορείο Bluetooth
Αλλά ας μην «απλώνουμε τις σκέψεις μας στο δέντρο», ας εστιάσουμε την προσοχή μας προς το παρόν σε ένα συγκεκριμένο ελαστικό:ΜΠΟΡΩ (σύμφωνα με τις απόψεις της εταιρείας BOSCH).
Χρήση του διαύλου CAN ως παράδειγμα μονάδα ισχύος, μπορείτε να δείτε το σχήμα του σήματος:

Φωτογραφία 3
Όταν βρίσκεστε στο λεωφορείο High CAN κυρίαρχη κατάσταση, η τάση στο καλώδιο αυξάνεται στα 3,5 βολτ.
Στην υπολειπόμενη κατάσταση, η τάση και στα δύο καλώδια είναι 2,5 βολτ.
Όταν στη γραμμήΧαμηλός κυρίαρχη κατάσταση, η τάση πέφτει στο 1,5 βολτ.
(Το «κυρίαρχο» είναι ένα φαινόμενο που κυριαρχεί, κυριαρχεί ή κυριαρχεί σε οποιοδήποτε χώρο, από λεξικά).
Για να αυξηθεί η αξιοπιστία της μετάδοσης δεδομένων, ο δίαυλοςΜΠΟΡΩ μια διαφορική μέθοδος μετάδοσης σημάτων μέσω δύο καλωδίων Twisted Pair . Και τα καλώδια που σχηματίζουν αυτό το ζεύγος ονομάζονται CAN High και CAN Low .
Στην αρχική κατάσταση του διαύλου, διατηρείται σταθερή τάση και στα δύο καλώδια σε ένα ορισμένο (βασικό) επίπεδο. Για ελαστικόΜΠΟΡΩ μονάδα ισχύος είναι περίπου 2,5 βολτ.
Αυτή η αρχική κατάσταση ονομάζεται «κατάσταση ηρεμίας» ή «υπολειπόμενη κατάσταση».
Πώς μεταδίδονται και μετατρέπονται τα σήματα;ΜΠΟΡΕΙ λεωφορείο;
Κάθε μονάδα ελέγχου είναι συνδεδεμένη μεΜΠΟΡΩ διαύλου μέσω μιας ξεχωριστής συσκευής που ονομάζεται πομποδέκτης, ο οποίος έχει έναν δέκτη σήματος, ο οποίος είναι ένας διαφορικός ενισχυτής εγκατεστημένος στην είσοδο σήματος:

φωτογραφία 4
Έρχεται με σύρμαΨηλα και χαμηλα Τα σήματα εισέρχονται στον διαφορικό ενισχυτή, υποβάλλονται σε επεξεργασία και αποστέλλονται στην είσοδο της μονάδας ελέγχου.
Αυτά τα σήματα αντιπροσωπεύουν την τάση στην έξοδο του διαφορικού ενισχυτή.
Ο διαφορικός ενισχυτής παράγει αυτήν την τάση εξόδου ως τη διαφορά μεταξύ των τάσεων στα καλώδια High και Low του διαύλου CAN.
Αυτό εξαλείφει την επίδραση της βασικής τάσης (για τον δίαυλο CAN της μονάδας ισχύος είναι 2,5 V) ή οποιαδήποτε τάση που προκαλείται, για παράδειγμα, από εξωτερικό θόρυβο.
Παρεμπιπτόντως, για την παρέμβαση. Όπως λένε, «λάστιχοΜΠΟΡΩ Είναι αρκετά ανθεκτικό στις παρεμβολές, γι' αυτό και χρησιμοποιείται τόσο ευρέως».
Ας προσπαθήσουμε να το καταλάβουμε αυτό.
Καλώδια διαύλου CAN Η μονάδα ισχύος βρίσκεται στο χώρο του κινητήρα και μπορεί να επηρεαστεί από διάφορους τύπους παρεμβολών, για παράδειγμα, παρεμβολές από το σύστημα ανάφλεξης.
Από το λεωφορείο CAN αποτελείται από δύο καλώδια που είναι στριμμένα μεταξύ τους, τότε η παρεμβολή επηρεάζει ταυτόχρονα δύο καλώδια:

Από το παραπάνω σχήμα μπορείτε να δείτε τι συμβαίνει στη συνέχεια: στον διαφορικό ενισχυτή, η τάση στο καλώδιο Low (1,5 V - "Σελ ") αφαιρείται από την τάση
στο καλώδιο High (3,5 V - "Σελ ") και δεν υπάρχει παρεμβολή στο επεξεργασμένο σήμα (" Pp" - παρεμβολή).

Σημείωση: Ανάλογα με τη διαθεσιμότητα του χρόνου, το άρθρο μπορεί να συνεχιστεί - πολλά απομένουν "παρασκηνιακά".
Kucher V.P.
© Legion-Avtodata
Μπορεί επίσης να σας ενδιαφέρει:
Τι είναι ένα λεωφορείο CAN;
Η ιστορία του CAN ξεκίνησε στα μέσα της δεκαετίας του '80 του περασμένου αιώνα. Η Bosch, μαζί με την Intel, έχουν αναπτύξει μια νέα ψηφιακή διεπαφή για τη μεταφορά δεδομένων - Controller Area Network (CAN).

Αναλογική σύνδεση συναγερμού (χωρίς διαύλου CAN)
Γιατί χρειάζεστε ένα λεωφορείο CAN σε ένα αυτοκίνητο;
Ο δίαυλος CAN σάς επιτρέπει να συνδέσετε οποιονδήποτε αριθμό αισθητήρων, ελεγκτών, ενεργοποιητών και άλλων μονάδων που βρίσκονται στο αυτοκίνητο (για παράδειγμα: ABS, SRS AIRBAG, συστήματα ESP, σύστημα ακινητοποίησης, μονάδα ελέγχου κινητήρα, κλίμα, κιβώτιο ταχυτήτων, κεντρικό κλείδωμα, φως, ανάρτηση , πίνακα οργάνων κτλ...) σε λειτουργία duplex (λήψη και μετάδοση δεδομένων) σε ταχύτητες έως 1 Mbit/s. Ταυτόχρονα, ο ίδιος ο δίαυλος κονσερβών αποτελείται μόνο από δύο καλώδια (συνεστραμμένο ζεύγος). Προηγουμένως, εκατοντάδες καλώδια έπρεπε να χρησιμοποιηθούν για τη σύνδεση μπλοκ επειδή... Η μετάδοση μιας μονάδας πληροφοριών από μπλοκ σε μπλοκ πραγματοποιήθηκε μέσω ξεχωριστού καλωδίου.

Εγκατάσταση συναγερμού μέσω διαύλου CAN
Συναγερμοί αυτοκινήτου με μονάδα CAN.

Μονάδα CAN
Οι σύγχρονοι συναγερμοί αυτοκινήτων κατασκευάζονται με μια ενσωματωμένη μονάδα CAN, η οποία σας επιτρέπει να συνδέσετε τον συναγερμό αυτοκινήτου απευθείας στον ψηφιακό δίαυλο CAN του αυτοκινήτου. Ο συναγερμός αυτοκινήτου λαμβάνει ψηφιακές πληροφορίες σχετικά με την κατάσταση των οριακών διακοπτών, των κλειδαριών, της ανάφλεξης, του χειρόφρενου, του στροφόμετρου κ.λπ. και μπορεί επίσης να ελέγξει κλειδαριές θυρών, ηλεκτρικά παράθυρα, ηλιοροφή, τυπικό συναγερμό και ορισμένα άλλα συστήματα οχημάτων. σας επιτρέπει να μειώσετε σημαντικά τις παρεμβολές στην τυπική ηλεκτρική καλωδίωση (οι συνδέσεις γίνονται μόνο σε 6-8 καλώδια, αντί για 15-20 στην έκδοση χωρίς τη χρήση διαύλου κονσερβών) και αποφεύγονται προβλήματα με την εγγύηση στον ηλεκτρικό εξοπλισμό του αυτοκινήτου.
Ένα σύγχρονο αυτοκίνητο δεν είναι μόνο μέσο μεταφοράς, αλλά και προηγμένο gadget με λειτουργίες πολυμέσων και ηλεκτρονικό σύστημα ελέγχου μονάδων και ένα σωρό αισθητήρες. Πολλές αυτοκινητοβιομηχανίες προσφέρουν τις λειτουργίες βοηθών κυκλοφορίας, βοηθών στάθμευσης, παρακολούθησης και ελέγχου του αυτοκινήτου από το τηλέφωνο. Αυτό είναι δυνατό χάρη στη χρήση ενός διαύλου CAN σε ένα αυτοκίνητο στο οποίο είναι συνδεδεμένα όλα τα συστήματα: κινητήρας, σύστημα πέδησης, τιμόνι, πολυμέσα, κλίμα κ.λπ.
Το αυτοκίνητό μου είναι Skoda Octavia 2011. δεν προσφέρει δυνατότητες ελέγχου από το τηλέφωνο, γι 'αυτό αποφάσισα να διορθώσω αυτό το μειονέκτημα και ταυτόχρονα να προσθέσω μια λειτουργία φωνητικού ελέγχου. Ως πύλη μεταξύ του διαύλου CAN και του τηλεφώνου, χρησιμοποιώ ένα Raspberry Pi με ασπίδα CAN BUS και δρομολογητή WiFi TP-Link. Το πρωτόκολλο επικοινωνίας μεταξύ των μονάδων αυτοκινήτου είναι κλειστό και η Volkswagen αρνήθηκε να παράσχει έγγραφα πρωτοκόλλου σε όλες τις επιστολές μου. Επομένως, ο μόνος τρόπος για να μάθετε πώς επικοινωνούν οι συσκευές σε ένα αυτοκίνητο και να μάθετε πώς να τις ελέγχετε είναι η αντίστροφη μηχανική του πρωτοκόλλου διαύλου VW CAN.
Ενέργησα βήμα βήμα:
- Σύνδεση με το λεωφορείο CAN ενός αυτοκινήτου
- Φωνητικός έλεγχος με Homekit και Siri
Ανάπτυξη μιας ασπίδας CAN για το Raspberry Pi
Πήρα το κύκλωμα θωράκισης εδώ lnxpps.de/rpie, υπάρχει επίσης μια περιγραφή των ακίδων, 2 μικροκυκλώματα MCP2515 και MCP2551 χρησιμοποιούνται για την επικοινωνία με το CAN. 2 καλώδια CAN-High και CAN-Low συνδέονται στην θωράκιση. Έκανα την πλακέτα στο SprintLayout 6, ίσως κάποιος θα βρει χρήσιμο το CANBoardRPi.lay (στη φωτογραφία τίτλου είναι ένα πρωτότυπο της ασπίδας σε ένα breadboard).

Εγκατάσταση λογισμικού για εργασία με το δίαυλο CAN
Στο Raspbian πριν από 2 χρόνια χρειάστηκε να ενημερώσω το bcm2708.c για να προσθέσω υποστήριξη CAN (ίσως δεν απαιτείται τώρα). Για να εργαστείτε με το δίαυλο CAN, πρέπει να εγκαταστήσετε το πακέτο βοηθητικού προγράμματος can-utils από το github.com/linux-can/can-utils και, στη συνέχεια, να φορτώσετε τις μονάδες και να ανεβάσετε τη διεπαφή δοχείου:# αρχικοποίηση insmod spi-bcm2708 insmod can insmod can-dev insmod can-raw insmod can-bcm insmod mcp251x # Maerklin Gleisbox (60112 και 60113) χρησιμοποιεί 250000 # λειτουργία loopback για δοκιμή τύπου loopback can02 can0back canop00 link
Ελέγχουμε ότι η διεπαφή CAN είναι επάνω με την εντολή ifconfig:

Μπορείτε να ελέγξετε ότι όλα λειτουργούν στέλνοντας μια εντολή και λαμβάνοντάς την.
Σε ένα τερματικό ακούμε:
Root@raspberrypi ~ # candump any,0:0,#FFFFFFFF
Σε άλλο τερματικό στέλνουμε:
Root@raspberrypi ~ # cansend can0 123 # deadbeef
Μια πιο λεπτομερής διαδικασία εγκατάστασης περιγράφεται εδώ lnxpps.de/rpie.
Σύνδεση με το λεωφορείο CAN ενός αυτοκινήτου
Έχοντας μελετήσει λίγο την ανοιχτή τεκμηρίωση για το λεωφορείο VW CAN, ανακάλυψα ότι χρησιμοποιώ 2 λεωφορεία.Δίαυλος μετάδοσης κίνησης CAN, μεταδίδοντας δεδομένα με ταχύτητα 500 kbit/s, συνδέει όλες τις μονάδες ελέγχου που εξυπηρετούν αυτή τη μονάδα.
Για παράδειγμα, οι ακόλουθες συσκευές μπορούν να συνδεθούν στο δίαυλο CAN της μονάδας ισχύος:
- τη μονάδα ελέγχου κινητήρα,
- μονάδα ελέγχου ABS,
- μονάδα ελέγχου για το σύστημα σταθεροποίησης συναλλαγματικών ισοτιμιών,
- μονάδα ελέγχου κιβωτίου ταχυτήτων,
- μονάδα ελέγχου αερόσακου,
- ταμπλό οργάνων.
Για παράδειγμα, στο δίαυλο CAN του συστήματος Comfort και πληροφορίες<командной системы могут быть
Συνδέονται οι ακόλουθες συσκευές:
- μονάδα ελέγχου για το σύστημα Climatronic ή το σύστημα κλιματισμού,
- μονάδες ελέγχου στις πόρτες αυτοκινήτων,
- Μονάδα ελέγχου συστήματος Comfort,
- μονάδα ελέγχου με οθόνη για ραδιόφωνο και σύστημα πλοήγησης.
Και τα δύο λεωφορεία συνδέονται μέσω μιας πύλης, η οποία βρίσκεται στην περιοχή κάτω από το τιμόνι, και μια διαγνωστική υποδοχή OBD2 συνδέεται επίσης στην πύλη. Δυστυχώς, δεν μπορείτε να ακούσετε την κίνηση και από τα δύο λεωφορεία μέσω της υποδοχής OBD2, μπορείτε μόνο να στείλετε μια εντολή και ζητήστε την κατάσταση. Αποφάσισα ότι θα δούλευα μόνο με το λεωφορείο "Comfort" και το πιο βολικό μέρος για να συνδεθώ με το λεωφορείο ήταν ο σύνδεσμος στην πόρτα του οδηγού.

Τώρα μπορώ να ακούω όλα όσα συμβαίνουν στο δίαυλο Comfort CAN και να στέλνω εντολές.
Ανάπτυξη sniffer και μελέτη του πρωτοκόλλου CAN bus

Αφού έχω πρόσβαση για να ακούσω το CAN bus, πρέπει να αποκρυπτογραφήσω ποιος μεταδίδει τι σε ποιον. Η μορφή πακέτου CAN φαίνεται στο σχήμα.

Όλα τα βοηθητικά προγράμματα από το σύνολο can-utils μπορούν να αναλύουν τα ίδια τα πακέτα CAN και να παρέχουν μόνο χρήσιμες πληροφορίες, και συγκεκριμένα:
- Αναγνωριστικό
- Μήκος δεδομένων
- Δεδομένα
Για το macOS έγραψα μια απλή εφαρμογή που προσθέτει ένα κελί στον πίνακα για κάθε διεύθυνση συσκευής και σε αυτό το κελί μπορώ ήδη να δω ποια δεδομένα αλλάζουν.

Πάτησα το κουμπί του τροφοδοτικού του παραθύρου, βρήκα ένα κελί στο οποίο αλλάζουν τα δεδομένα και, στη συνέχεια, προσδιόρισα ποιες εντολές αντιστοιχούν στο πάτημα προς τα κάτω, το πάτημα προς τα επάνω, το κράτημα προς τα πάνω, το κράτημα.
Μπορείτε να ελέγξετε ότι η εντολή λειτουργεί στέλνοντας από το τερματικό, για παράδειγμα, την εντολή να σηκώσετε το αριστερό γυαλί προς τα πάνω:
Cansend can0 181#0200
Εντολές που μεταδίδουν συσκευές μέσω του διαύλου CAN σε αυτοκίνητα VAG (Skoda Octavia 2011), που λαμβάνονται με χρήση αντίστροφης μηχανικής:
// Μπροστινό αριστερό τζάμι επάνω 181#0200 // μπροστινό αριστερό τζάμι κάτω 181#0800 // μπροστινό δεξί τζάμι επάνω 181#2000 // μπροστινό δεξί τζάμι κάτω 181#8000 // πίσω αριστερό τζάμι επάνω 181#0002 Glass επάνω 181#0002 // πίσω αριστερά Κάτω 181#0008 // Πίσω Δεξί Γυαλί Επάνω 181#0020 // Πίσω Δεξιά Γυαλί Κάτω 181#0080 // Κεντρική Κλείδωμα Ανοιχτό 291#09AA020000 // Κεντρική Κλείδωμα Κλείσιμο 291#0955040000 // Ενημέρωση W κατάστασης φωτεινότητας η εντολή άνοιγμα/κλείσιμο της κλειδαριάς, στη συνέχεια το LED στο κουμπί ελέγχου κλειδαριάς δεν αλλάζει κατάσταση, έτσι ώστε να δείχνει την πραγματική κατάσταση της κεντρικής κλειδαριάς, πρέπει να στείλετε μια εντολή ενημέρωσης) 291#0900000000
Ήμουν πολύ τεμπέλης για να μελετήσω όλες τις άλλες συσκευές, οπότε σε αυτήν τη λίστα, μόνο ό,τι ήταν ενδιαφέρον για μένα.
Ανάπτυξη εφαρμογών τηλεφώνου
Χρησιμοποιώντας τις εντολές που έλαβα, έγραψα μια εφαρμογή για το iPhone που ανοίγει/κλείνει τα παράθυρα και ελέγχει το κεντρικό κλείδωμα.Στο Raspberry Pi ξεκίνησα 2 μικρούς διακομιστές, ο πρώτος στέλνει δεδομένα από το candump στο TCP/IP, ο δεύτερος λαμβάνει εντολές από το iPhone και τους στέλνει στο cansend.

Πηγές της εφαρμογής ελέγχου αυτοκινήτου για iOS
// // FirstViewController.m // Έλεγχος αυτοκινήτου // // Δημιουργήθηκε από τον Vitaliy Yurkin στις 17.05.15. // Πνευματικά δικαιώματα (γ) 2015 Vitaliy Yurkin. Ολα τα δικαιώματα διατηρούνται. // #import "FirstViewController.h" #import "DataConnection.h" #import "CommandConnection.h" @interface FirstViewController ()
Υπάρχει τρόπος να μην γράψετε τη δική σας εφαρμογή για το τηλέφωνο, αλλά να χρησιμοποιήσετε μια έτοιμη από τον κόσμο των έξυπνων κατοικιών, απλά πρέπει να εγκαταστήσετε ένα σύστημα αυτοματισμού στο Raspberry Pi
Ένα σύγχρονο αυτοκίνητο είναι εξοπλισμένο με ηλεκτρονικές μονάδες ελέγχου για διάφορα συστήματα: κινητήρα, σύστημα αντιμπλοκαρίσματος φρένων, αμάξωμα και άλλα. Ουσιαστικά, αυτές οι μονάδες είναι μικροϋπολογιστές.
Για να καταλάβετε τι είναι ένα CAN bus σε ένα αυτοκίνητο, φανταστείτε ότι στο αυτοκίνητο είναι οργανωμένο ένα τοπικό δίκτυο, στο οποίο είναι συνδεδεμένοι αυτοί οι μικροϋπολογιστές - έτσι ώστε να συνεργάζονται.
Αυτό είναι παρόμοιο με τον τρόπο με τον οποίο οι υπολογιστές γραφείου συνδέονται σε ένα δίκτυο, έτσι ώστε οι υπάλληλοι να μπορούν εύκολα να λαμβάνουν πληροφορίες ο ένας από τον άλλον και το αφεντικό να έχει την ευκαιρία να παρακολουθεί γρήγορα την εργασία των υπαλλήλων γραφείου.
Ο ενσωματωμένος υπολογιστής και το διαγνωστικό σύστημα λειτουργούν ως το αφεντικό στο αυτοκίνητο.
Ιστορικό ανάπτυξης και ενοποίησης Δικτύου Περιοχής Ελεγκτών
Η εταιρεία BOSCH, πραγματοποιώντας έρευνα στον τομέα του αυτοματισμού τη δεκαετία του '80 του περασμένου αιώνα, πρότεινε ένα πρότυπο επικοινωνίας μικροελεγκτή που θα μπορούσε να χρησιμοποιηθεί στην αυτοκινητοβιομηχανία.
Το πρότυπο CAN δεν περιορίζεται στα αυτοκίνητα. Επί του παρόντος, χρησιμοποιείται στην έννοια του «έξυπνου σπιτιού», στον βιομηχανικό αυτοματισμό κ.λπ.
Όπως εφαρμόζεται στην τεχνολογία αυτοκινήτων, το πρότυπο CAN (Controller Area Network) είναι προσαρμοσμένο σε ένα δίαυλο με φυσικό επίπεδο. Οργανώνεται χρησιμοποιώντας ένα συνεστραμμένο ζεύγος αγωγών, κατά μήκος των οποίων ταξιδεύουν πακέτα σημάτων διαφορετικών πολικοτήτων.
Αυτό το πρότυπο έχει λάβει τη διεθνή ταξινόμηση ISO 11898. Ένα πλαίσιο (πακέτο) περιλαμβάνει ένα σήμα πληροφοριών 11 bit (ή 29 bit σε εκτεταμένη λειτουργία).
Γενικά, ένας δίαυλος CAN δεν μπορεί απαραίτητα να υλοποιηθεί χρησιμοποιώντας καλώδια συνεστραμμένου ζεύγους. Αυτό μπορεί να είναι είτε οπτική ίνα είτε ραδιοφωνικό κανάλι.
Μπορούμε να υποθέσουμε ότι με την εισαγωγή των μη επανδρωμένων οχημάτων, ο δίαυλος CAN θα μετατραπεί σε κινητή διεπαφή για τη μετάδοση πληροφοριών για έναν, και πιθανώς ένα συγκρότημα αυτοκινήτων.
Car CAN bus: τι είναι και η αρχή λειτουργίας του
Το λεωφορείο είναι ένα τοπικό δίκτυο μέσω του οποίου ανταλλάσσονται πληροφορίες μεταξύ των μονάδων ελέγχου διαφόρων συστημάτων οχημάτων. Έτσι, η μονάδα ελέγχου, για παράδειγμα, ενός κινητήρα αυτοκινήτου, εκτός από τον κύριο μικροελεγκτή που συντηρεί τον κινητήρα, αναλαμβάνει την παρουσία ενός ελεγκτή CAN, ο οποίος παράγει παλμούς κατά μήκος δύο διαύλων: CAN-high και CAN-low (H και L ).
Αυτά τα σήματα μεταδίδονται μέσω αγωγών (συνεστραμμένου ζεύγους) από έναν πομποδέκτη. Οι πομποδέκτες ή πομποδέκτες έχουν σχεδιαστεί για:
- ενίσχυση σήματος,
- εξασφάλιση θορύβου των μεταδιδόμενων παλμών.
- προσαρμογή της ταχύτητας μετάδοσης ψηφιακής ροής·
- προστασία γραμμής σε περίπτωση βλάβης του διαύλου CAN.
Οι ακόλουθοι τύποι πομποδέκτη χρησιμοποιούνται τώρα στην τεχνολογία αυτοκινήτων - High Speed και Fault Toleran. Ο πομπός υψηλής ταχύτητας παρέχει σχετικά υψηλή ταχύτητα μεταφοράς πληροφοριών - έως 1 megabit ανά δευτερόλεπτο. Ο δεύτερος τύπος πομπού έχει χαμηλότερη ταχύτητα μεταφοράς πληροφοριών - έως 120 kilobits ανά δευτερόλεπτο. Είναι όμως λιγότερο ευαίσθητο (ανεκτικό σε σφάλματα) στην ποιότητα του διαύλου CAN και επιτρέπει αποκλίσεις στις παραμέτρους του.
Διάγραμμα οργάνωσης ανταλλαγής δεδομένων
Το δομικό διάγραμμα της σύνδεσης διαφόρων μονάδων οχήματος με το δίαυλο CAN μπορεί να απεικονιστεί ως εξής:

Για να συντονιστούν όλες οι συσκευές, δηλαδή να οργανωθούν οι βέλτιστες συνθήκες και η ταχύτητα λήψης και μετάδοσης, οι αντιστάσεις εξόδου των πομπών πρέπει να είναι περίπου οι ίδιες.
Εάν κάποια από τις μονάδες ελέγχου των συστημάτων του οχήματος αποσυνδεθεί ή καταστραφεί, η αντίσταση του διαύλου αλλάζει, η αντιστοίχιση αντίστασης διακόπτεται, γεγονός που οδηγεί σε σημαντική μείωση της ταχύτητας μεταφοράς πληροφοριών κατά μήκος του διαύλου. Τέτοιες παραβιάσεις μπορεί να οδηγήσουν σε πλήρη απώλεια επικοινωνίας μέσω του διαύλου CAN.
Σε ορισμένα οχήματα, χρησιμοποιείται μια ξεχωριστή μονάδα πύλης για την εξάλειψη προβλημάτων με το συγχρονισμό πληροφοριών CAN.

Κάθε μήνυμα που μεταδίδεται μέσω του διαύλου CAN έχει το δικό του αναγνωριστικό, για παράδειγμα «θερμοκρασία ψυκτικού» και έναν κωδικό που αντιστοιχεί στην τιμή του, όπως «98,7 βαθμοί Κελσίου». Αυτές δεν θα είναι απαραίτητα απόλυτες τιμές· στις περισσότερες περιπτώσεις θα είναι σχετικές δυαδικές μονάδες, οι οποίες μετατρέπονται περαιτέρω σε σήματα ελέγχου και παρακολούθησης.

Τα ίδια δεδομένα χρησιμοποιούνται από διαγνωστικά εργαλεία για την παρακολούθηση και την επεξεργασία πληροφοριών σχετικά με τα κύρια συστήματα οχημάτων.
Κύριοι τρόποι λειτουργίας του διαύλου CAN:
- ενεργό (ανάφλεξη αναμμένη).
- ύπνος (με σβηστή ανάφλεξη).
- ξυπνήστε και αποκοιμηθείτε (όταν ανοίγετε και σβήνετε την ανάφλεξη).
Κατά τη λειτουργία αδράνειας, η κατανάλωση ρεύματος διαύλου είναι ελάχιστη. Ωστόσο, ταυτόχρονα, σήματα σχετικά με την κατάσταση ανοίγματος θυρών και παραθύρων και άλλα συστήματα που σχετίζονται με τις λειτουργίες ασφαλείας του αυτοκινήτου μεταδίδονται μέσω του λεωφορείου (σε χαμηλότερη συχνότητα).
Οι περισσότερες σύγχρονες συσκευές διάγνωσης παρέχουν μια λειτουργία για τη διάγνωση σφαλμάτων μέσω του διαύλου CAN. Τεχνικά, αυτό οργανώνεται με απευθείας σύνδεση των αγωγών στο διαγνωστικό σύνδεσμο.

Πλεονεκτήματα και μειονεκτήματα της χρήσης του λεωφορείου CAN σε αυτοκίνητο
Αρχικά, εάν το πρότυπο CAN δεν είχε προταθεί στη δεκαετία του '80 του περασμένου αιώνα, θα είχε αντικατασταθεί ένας άλλος τύπος αλληλεπίδρασης μεταξύ συστημάτων οχημάτων.
Είναι δυνατόν, φυσικά, να τοποθετηθούν όλες οι μονάδες ελέγχου του συστήματος οχημάτων σε ένα ενιαίο superblock, στο οποίο η αλληλεπίδραση διαφορετικών συστημάτων μπορεί να διασφαλιστεί μέσω λογισμικού. Οι Γάλλοι κατασκευαστές έχουν κάνει παρόμοιες προσπάθειες. Ωστόσο, καθώς η λειτουργικότητα και η απόδοση αυξάνονται, η πιθανότητα αστοχιών αυξάνεται σημαντικά. Βλάβες, για παράδειγμα, υαλοκαθαριστήρων, μπορεί να οδηγήσουν σε αστοχία εκκίνησης του κινητήρα.
Τα κύρια πλεονεκτήματα της χρήσης ενός διαύλου CAN:
- τη δυνατότητα διεξαγωγής επιχειρησιακού ελέγχου και
- Συνδυασμός ροών πληροφοριών σε ένα ενιαίο κανάλι προστασίας από θόρυβο.
- καθολικότητα, προώθηση της ενοποίησης των διαγνωστικών διαδικασιών·
- δυνατότητα σύνδεσης συστημάτων ασφαλείας μέσω διαύλου CAN (δεν χρειάζεται να τρέξετε καλωδίωση σε κάθε στοιχείο ελέγχου).
Μειονεκτήματα του διαύλου CAN:
- χαμηλή αξιοπιστία?
- Η ζημιά σε μία από τις μονάδες ελέγχου μπορεί να οδηγήσει σε πλήρη αδυναμία λειτουργίας της σύνδεσης CAN.
Αντιμετώπιση προβλημάτων
Δεν υπάρχει ενδεικτική λυχνία βλάβης CAN στο ταμπλό του οχήματος. Μπορείτε να κρίνετε ότι η απόδοση του διαύλου CAN είναι μειωμένη από έμμεσους δείκτες:
- αρκετές ενδεικτικές λυχνίες σφαλμάτων ανάβουν ταυτόχρονα στο ταμπλό.
- Η θερμοκρασία του ψυκτικού και τα επίπεδα καυσίμου εξαφανίστηκαν.
Πρώτα απ 'όλα, θα πρέπει να κάνετε μια διάγνωση. Εάν υποδεικνύει δυσλειτουργία του διαύλου CAN, θα πρέπει να αρχίσετε να επιλύετε το πρόβλημα.
Ακολουθία εργασιών:
- Βρείτε τους αγωγούς του διαύλου συνεστραμμένου ζεύγους. Συχνά είναι μαύρα (υψηλά) και πορτοκαλοκαφέ (χαμηλά).
- Ελέγξτε την τάση στους αγωγούς με την ανάφλεξη αναμμένη χρησιμοποιώντας ένα πολύμετρο. Τα επίπεδα δεν πρέπει να είναι 0 ή περισσότερα από 11 Volt (συνήθως περίπου 4,5 Volt).
- Κλείστε την ανάφλεξη και αποσυνδέστε τον πόλο της μπαταρίας. Μετρήστε την αντίσταση μεταξύ των αγωγών. Αν τείνει στο μηδέν, σημαίνει ότι υπάρχει βραχυκύκλωμα στο λεωφορείο, αν πλησιάζει στο άπειρο, υπάρχει διακοπή.
- Ξεκινήστε να ψάχνετε για ανοιχτό κύκλωμα ή βραχυκύκλωμα.
- Εάν υπάρχει υποψία ότι ο δίαυλος είναι κλειστός λόγω βλάβης οποιασδήποτε μονάδας ελέγχου, μπορείτε να απενεργοποιήσετε διαδοχικά τις μονάδες ελέγχου και να παρακολουθήσετε την αντίσταση και την απόδοση του διαύλου.
Η δυσλειτουργία του διαύλου CAN είναι μια σύνθετη δυσλειτουργία του ηλεκτρικού εξοπλισμού του οχήματος. Εάν ο ιδιοκτήτης του αυτοκινήτου δεν έχει τις απαραίτητες δεξιότητες επισκευής ηλεκτρικού ρεύματος, τότε είναι καλύτερο να χρησιμοποιήσετε τις υπηρεσίες ενός ειδικού.