
Mitsubishi on uurinud süsteemide kasutamist praktikas nelikvedu, et teha kindlaks, milline tehnoloogiline lahendus on seda tüüpi auto jaoks kõige sobivam ja selle kompaktse krossoveri tulevastele omanikele kõige mugavam.
Insenerid pöördusid ära traditsioonilisest lahendusest – kasutamisest automaatkäigukast tellitava nelikveoga. Sellised süsteemid põhinevad asjaolul, et kui esirattad libisevad, jaotatakse osa pöördemomendist ümber tagumised rattad. Mitsubishi spetsialistid mõistsid, et tarbijad olid rohkem huvitatud süsteemidest, mis vähendavad aktiivselt rataste libisemise tõenäosust.
Eelmisel Outlanderil oli püsiv nelikvedu keskdiferentsiaal, lukustatud viskoosse siduriga, ajami jaotus piki telge 50:50 See süsteem tagab suurepärase jõudluse rasketes tingimustes ilmastikuolud, kuid igapäevaseks kasutamiseks oli kütusekulu suur. Mitsubishi püüdis anda uus Outlander sama või parimad omadused kui seda kasutatakse karmid tingimused, minimaalsete muutustega kütusekulu näitajates.
Nii ilmus nelikveosüsteem MITSUBISHI käigukastid AWC ( Kõik rattad kontroll). KOOS inglise keel All Wheel Control tähendab sõna-sõnalt kõigi rataste juhtimist. See süsteem võimaldab juhil valida ajami tüüpi. Süsteem on sisuliselt kombinatsioon spetsiaalsetest nelikvedu käigukast Multi-Select 4WD ja elektrooniline levitamine pöördemoment, ja lisaks libisemisvastane kaasaegne süsteem ja süsteem suuna stabiilsus. Tänu AWC-süsteemile saavutatakse auto rataste suurepärane haardumine teega ja suurepärane juhitavus libedatel teelõikudel. Käigukasti optimaalse töö tagamiseks valige lihtsalt üks kolmest keskkonsoolil esitatud režiimist: “2WD”, “4WD” või “Lock”.
| Sõidurežiim | Kirjeldus | Eelised |
| 2WD | Suunab pöördemomendi esiratastele | Parem kütusesäästlikkus, väiksem sõiduki müra, parem juhitavus. See jätab ka võimaluse, et juhtplokk suunab pöördemomendi tagasillale, et vähendada selle müra. |
| Auto 4WD | Mõõdab pöördemomendi suunda tagaratastele sõltuvalt gaasipedaali asendist ning esi- ja tagarataste kiiruste erinevusest | Optimaalne pöördemomendi jaotus antud sõidutingimuste jaoks. Pöördemomendi jaotus esi- ja tagatelje vahel on automaatne elektrooniline üksus sõltuvalt sõiduki sõiduparameetritest (esi- ja tagarataste kiirus, gaasipedaali asend ja sõiduki kiirus). Eelistatakse kaherattaveo režiimi. |
| 4WD lukk | Tagaratastele suunatakse 1,5 korda rohkem pöördemomenti kui 4WD režiimis | Suurendab nakkumist pinnaga ja tagab stabiilsuse peal suur kiirus Ja parem murdmaavõime ebatasasel või libedal pinnal. LOCK-režiim sarnaneb 4WD-režiimiga, kuid telgede vahel on muudetud pöördemomendi jaotuse seadust. Madala kiirusega juures tagatelg Tarnitakse 1,5 korda suuremat pöördemomenti ja suurel kiirusel jaotub pöördemoment telgede vahel võrdselt. |
Kaks nelikveo režiimi
Auto 4WD
Kui valite "4WD Auto", siis nelikveosüsteem Outlander auto 4WD jaotab osa pöördemomendist pidevalt tagaratastele, suurendades gaasipedaali vajutamisel automaatselt suhet. Sidur saadab kuni 40% jõust tagaratastele, kui gaasipedaal on täielikult alla vajutatud, ja vähendab seda 25%ni kiirustel üle 40 miili tunnis. Kell ühtlane liikumine Reisikiirusel suunatakse kuni 15% saadaolevast pöördemomendist tagaratastele. Madalatel kiirustel sisse järsud pöörded jõudu vähendatakse, pakkudes sujuv läbipääs keerata.
4WD lukk
Spetsiaalselt sõitmiseks rasked tingimused, näiteks lumes saab juht valida režiimi "4WD Lock". Kui lukk on sisse lülitatud, jaotab süsteem endiselt automaatselt pöördemomendi esi- ja tagarataste vahel, kuid suurem osa pöördemomendist kandub edasi tagaratastele. Näiteks mäel kiirendades saadab sidur suurema osa pöördemomendist kohe tagaratastele, et tagada kõigi nelja ratta veojõud. Seevastu automaatne nõudmisel kasutatav nelikvedu ootab esmalt, kuni esirattad libisevad, enne kui saadab pöördemomendi tagaratastele, mis võib kiirendamist segada.
Kuival teel tagab 4WD Lock režiim tõhusa kiirenduse. Rohkem pöördemomenti suunatakse tagaratastele, mis annab rohkem jõudu, parem juhitavus lumisel või lahtisel teel kiirendamisel ja parandab stabiilsust suured kiirused. Tagarataste pöördemomendi osakaal suureneb 4WD-režiimiga võrreldes 50%, mis tähendab, et kuival teel gaasipedaal täielikult alla vajutades suunatakse kuni 60% saadaolevast pöördemomendist tagaratastele. 4WD Lock režiimis ei vähene tagarataste pöördemoment kitsastes kurvides nii palju kui 4WD Auto režiimis sõites.
Eesmise/tagumise pöördemomendi suhtel 4WD režiimis on järgmised väärtused:
| Sõidurežiim | kuiv tee | Lumine tee | ||
| Rattad | ees | tagumine | ees | tagumine |
| Kiirendus | 69% | 31% | 50% | 50% |
| kiirusel 30 km/h | kiirusel 30 km/h | kiirusel 15 km/h | kiirusel 15 km/h | |
| 85% | 15% | 64% | 36% | |
| kiirusel 80 km/h | kiirusel 80 km/h | kiirusel 40 km/h | kiirusel 40 km/h | |
| Ühtlane kiirus | 84% | 16% | 74% | 26% |
| kiirusel 80 km/h | kiirusel 80 km/h | kiirusel 40 km/h | kiirusel 40 km/h | |
Struktuuriskeem

Süsteemi komponendid ja funktsioonid
|
Komponendi nimi |
Operatsioon |
|
|
|
Edastab CAN-i kaudu 4WD-ECU-le järgmised vajalikud signaalid.
|
|
|
Sõidurežiimi lüliti 2WD/4WD/LOCK |
Edastab 4WD-ECU sõidurežiimi lüliti asendisignaali. |
|
|
|
Süsteem hindab teeolud ja iga ECU signaalide põhjal suunab sõidurežiimi lüliti vajaliku osa pöördemomendist tagaratastele. Arvutage optimaalne diferentsiaalpiirjõud sõiduki seisukorra ja praeguse sõidurežiimi põhjal iga ECU signaalide põhjal, sõidurežiimi lüliti juhib elektroonilisele juhtlingile edastatavat vooluväärtust. |
|
|
Näidikute juhtimine (4WD töönäidik ja lukustusnäidik) näidikuplokis. |
|
|
Haldab enesediagnostika ja tõrkekindla funktsiooni. |
|
|
Diagnostikafunktsioonide juhtimine (ühildub MUT-III-ga). |
|
|
Elektrooniline siduri juhtimine |
4WD-ECU edastab praegusele väärtusele vastava pöördemomendi tagaratastele. |
|
Sõidurežiimi indikaator
|
Näidikuplokki sisseehitatud näitab valitud sõidurežiimi lülitusrežiimi (2WD režiimis ei kuvata).
|
|
Diagnostika pistik |
Väljastab diagnostikakoodid ja loob side MUT-III-ga. |
Süsteemi konfiguratsioon

Juhtimisahel

Elektrooniline juhtimisahel 4 W.D.

Disain


Elektrooniline sidurijuhtimine koosneb esikorpusest, põhisidrist, põhinukist, kuulist, juhtnukist, armatuurist, juhtsidurist), tagumisest korpusest, magnetpoolist ja võllist.
- Esikorpus on ühendatud kardaan ja pöörleb koos võlliga.
- Peasidur ja juhtsidur on paigaldatud korpuse esiosasse võllile (juhtsidur paigaldatakse nuki kaudu).
- Võll on läbi hammaste ühendatud tagumise diferentsiaali veohammasrattaga.
Operatsioon
Sidur on lahti (2WD: magnetmähis on pingevaba.)

Jaotuskorpuse liikumapanev jõud edastatakse sõukruvi võlli kaudu esikorpusesse. Kuna magnetpool on pingevaba, ei ole juhtsidur ja põhisidur sisse lülitatud ning veojõud ei kandu üle tagumise diferentsiaali võllile ja veohammasrattale.
Sidur töötab (4WD: magnetpoolid pinge.)

Jaotuskorpuse liikumapanev jõud edastatakse sõukruvi võlli kaudu esikorpusesse. Kui magnetpool on pingestatud, tekib magnetväli tagumise korpuse, mida juhib juhtsidur, ja armatuuri vahele. Magnetväli mõjutab juhitavat sidurit (pilotsidur) ja armatuur (armatuur) sisaldab sidurit (pilotsidur). Kui juhtsidur on sisse lülitatud, kandub liikumapanev jõud juhtnukile. Vastuseks sellele jõule tõmbub peanuki pall (pilootnukk) tagasi ja tekitab edasiliikumise. See impulss mõjub põhisidurile ja pöördemoment kandub tagumise diferentsiaali võlli ja käigukasti kaudu tagaratastele.
Reguleerides magnetpoolile antavat voolu, summa liikumapanev jõud tagaratastele edastatavat saab reguleerida vahemikus 0 kuni 100%.
ilmub 2016. aastal ümberehitatud kerega ja uute omadustega uus versioon ühendab endas nii oma sugulaste maastikuomadused kui ka sportliku elemendi. Eelmises versioonis kaebasid paljud kasutajad auto raske esiosa üle. Nüüd on disainerid soovidega arvestanud – uus versioon jätab mulje agressiivsest crossoverist. Auto esiosal on kroomitud liistud.
Salong
Venemaal esitletakse klientidele ainult krossoveri viiekohalist versiooni. Kuigi Salongis on ka kolme rea silte. Mugav funktsioon- diivani seljatoe kaldenurga muutmise võimalus. Istekoht on mugav, igas tasapinnas on piisavalt ruumi. Siseruum Interjöör pole saanud globaalseid muudatusi, ainult automaatse tumenemise funktsiooniga peegel. Tehnilisest küljest on see auto põhjalikult ümber kujundatud. Roolil olid mõõnad ja seda oli isegi mõnus hoida. Ilmus tagasisidet rool Heliisolatsiooniga said nad hästi hakkama, nüüd pole kummi sumin ja välised helid enam nii kuuldavad.
Pagasiruum
Linnas ostame sõiduks ja dünaamikaks sedaane ja laetud luukpärasid ning hingerõõmuks ostame krossovereid, kust autod läbi ei saa, meie krossover läheb läbi. Mööda metsateid linnast väljas puhkusereiside armastajale pole peamine mitte ainult mootori suurus ja selle omadused, vaid ka pagasiruumi maht, et õues puhkamiseks kõik mahuks ja siin sellest mahust piisab. Pagasiruumi kogumaht oli 591 l /1754 l, mida saab avada kolmel viisil. Aga ka umbes varuratas Tootjad ei ole unustanud, et varurehv asub väga soodsalt Mitsubishi Outlanderi põhja all, mis ei võta ruumi Mitsubishi pakiruum Outlander.
Nelikvedu Mitsubishi Outlander 2016.a saadaval koos 3-ga erinevad mootorid:
1: 2,0 l "DOHC MIVEC"
2: 2,4L DOHC-MIVEC
3. Kõige võimsam sellel autol on 3,0 L V.6 DOHC-MIVEC
Mis on "MIVEC"? - Tehnoloogia klapi ajastuse automaatseks juhtimiseks (tänu sellele elektrisüsteemid reguleeritud optimaalne võimsus ja kütusekulu.)
Keskmise jõudlusega auto - 2,4 liitrit arendab 167 hj. Pöördemoment 222 Nm 4100 p/min juures, tippkiirus 198 km/h. Sõiduki kliirens on 215 mm, teljevahe 2 m 67 cm, gaasipaagi maht 63 l. Töökulu on 13 liitrit sajale. Selle versiooni hind on 1 619 990 tuhat rubla.
Vedrustus
Samuti on auto varustatud peaaegu kõigi süsteemidega, mis aitavad seda sõidukit juhtida. See mudel läbis edukalt diagonaali riputamise testi. Vedrustus on muutunud elastsemaks. Outlanderi geomeetrilised omadused on pärast ümberkujundamist muutunud – vedrustuse, väljumis- ja raami nurgad on võrdunud 21 kraadiga ning see on peaaegu ideaalne kõigi takistuste ületamiseks, millele auto võib sõita. Mitsubishi Outlanderi vedrustuse kohta võib palju öelda, aga lühidalt: Mitz on lasknud ümber teha elektrilise roolivõimendi ja muudetud rooliseadeid, paigaldatud uut tüüpi vedrud ning kõige tähtsam on see, et "Amortisaatorid" on muudetud - vedrustus on muutunud tugevamaks ja talub nüüd suuri koormusi.
Tee peal avalik kasutamine see auto tuletab teile meelde, et maailmas pole imesid, see kogeb põnevust ja veeremised on peaaegu kriitilised, kuid see meeldib teile, sest see mudel ei lase teid teel ja maastikul ebakindlalt tunda. Juhitavuse ja maastikusõiduvõime parandamiseks on Mitsubishi Outlanderil sisseehitatud nelikveo režiim 4WD LUKK- pärast sisselülitamist kasutatakse palju lukke maksimaalselt ära ketas sidur.
Kui vaatate teisi autosid väljastpoolt, ei aima te kohe nende teepotentsiaali, kuid Mitsubishi Outlander Ei saa öelda, tema julge ja jõuline välimus hakkab kohe silma.
Omadused Valikud ja hinnad Foto ja video
Põhiversioon
Mootori tüüp: bensiin
Mootori töömaht: 2,0
HP: 146 hj
Pöördemoment: 196 Hm 4200 juures
Ajam: täis
Käigukast: automaatne
Kütusekulu 100 km kohta: linnas - 9,5 l, maanteel - 6,1 l, segatud - 7,3 l.
Maksimaalne kiirus: 193 km/h
Kiirendus 0-100 km/h: 11,1 sekundit
Kütuse tüüp: AI-92
Ratta mõõdud: 16 x 6,5 J
Rehvimõõdud: 215 / 70 R16
Instyle 4WD CVT S08
Venemaal alates 1 619 990 RUB.
Mitsubishi Outlanderi tehnilised omadused määravad kasutatavate elektrijaamade puhul kolm võimalust. Kaks 2,0- ja 2,4-liitrist bensiini “neljakest” toodavad 146 ja 167 hj. vastavalt. Peal mootoriliin sisaldab 3,0-liitrist V6-mootorit, mis on mõeldud Mitsubishi versioonid Outlander Sport. Ta areneb maksimaalne võimsus 230 hj ja tekitab pöördemomendi 292 Nm (3750 p/min juures).
Outlanderi tippmodifikatsioon hõlmab paigaldamist paarikaupa jõuseade 6-käiguline automaatkäigukast edasikandumine Teised krossoveri versioonid on varustatud pöördemomendi muunduriga kaheksanda põlvkonna Jatco CVT-ga. V6 tandem 230 hj ja 6 automaatkäigukasti tagab sportliku Outlander versioonid hea dünaamika– auto kiirendab 100 km/h 8,9 sekundiga. Crossover-variant, mis peidab kapoti all üht paari 4-silindrilist agregaati, ei saa sellise väledusega kiidelda, kulutades armatuurlaual rohkem kui 10 sekundit sadadeni.
Mitsubishi Outlanderi keskmine kütusekulu jääb vahemikku 7,3-8,9 liitrit. Kõige “küllastumatum” on muidugi passiandmetel 3,0-liitrine “kuus”, mis kulutab linnatsüklis umbes 12,2 liitrit kütust.
Auto kere geomeetrilised parameetrid on huvitavad eelkõige lähenemis- ja väljumisnurkade võrdsuse tõttu, millest kumbki ei ületa 21 kraadi. Sama tähendus on ka kaldtee nurgal. Kliirens(kliirens) Mitsubishi Outlander on 215 mm.
Jaapani krossover on saadaval esi- ja nelikveolise versioonina. Esivedu on ette nähtud ainult “noorema” 2,0-liitrise mootoriga versioonidele. Nelikveol on kaks võimalikku konfiguratsiooni: All Wheel Control (AWC) ja Super All Wheel Control (S-AWC). Teine võimalus, mis lisab stabiilsust kiiretel kurvides ja libedal pinnal, töötati välja spetsiaalselt Outlander Sport 3.0 jaoks.
Tehniline Mitsubishi tehnilised andmed Outlander – Pivot tabel:
| Parameeter | Outlander 2.0 CVT 146 hj | Outlander 2.4 CVT 167 hj | Outlander Sport 3.0 AT 230 hj | |
|---|---|---|---|---|
| Mootor | ||||
| Mootori tüüp | bensiin | |||
| Süstimise tüüp | jaotatud | |||
| Ülelaadimine | Ei | |||
| Silindrite arv | 4 | 6 | ||
| Silindri paigutus | in-line | V-kujuline | ||
| Ventiilide arv silindri kohta | 4 | |||
| Maht, kuup cm. | 1998 | 2360 | 2998 | |
| Võimsus, hj (pööretel minutis) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| Edasikandumine | ||||
| Sõida | ees | täis (AWC) | täis (AWC) | täis (S-AWC) |
| Edasikandumine | variaator | 6 automaatkäigukast | ||
| Vedrustus | ||||
| Esivedrustuse tüüp | sõltumatu MacPhersoni tüüp | |||
| Tagavedrustuse tüüp | sõltumatu, mitme lüliga | |||
| Pidurisüsteem | ||||
| Esipidurid | ventileeritav ketas | |||
| Tagumised pidurid | ventileeritav ketas | |||
| Juhtimine | ||||
| Võimendi tüüp | elektriline | |||
| Rehvid ja veljed | ||||
| Rehvi suurus | 215/70 R16 | 225/55 R18 | ||
| Ketta suurus | 6,5 Jx16 | 7,0 Jх18 | ||
| Kütus | ||||
| Kütuse tüüp | AI-92 | AI-95 | ||
| Paagi maht, l | 63 | 60 | 60 | |
| Kütusekulu | ||||
| Linnaratas, l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| Linnaväline tsikkel, l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| Kombineeritud tsikkel, l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| Mõõtmed | ||||
| Istmete arv | 5 | |||
| Pikkus, mm | 4695 | |||
| Laius, mm | 1800 | |||
| Kõrgus (siinidega), mm | 1680 | |||
| Teljevahe, mm | 2670 | |||
| Esiratta rööbastee, mm | 1540 | |||
| Tagaratta rööbastee, mm | 1540 | |||
| Pagasiruumi maht (min./max.), l | 591/1754 | 477/1640 | ||
| Kliirens (kliirens), mm | 215 | |||
| Kaal | ||||
| Äärekivi, kg | 1425 | 1490 | 1505 | 1580 |
| Täis, kg | 1985 | 2210 | 2270 | |
| Maksimaalne haagise mass (koos piduritega), kg | 1600 | |||
| Dünaamilised omadused | ||||
| Maksimaalne kiirus, km/h | 193 | 188 | 198 | 205 |
| Kiirendusaeg kuni 100 km/h, s | 11.1 | 11.7 | 10.2 | 8.7 |
Mitsubishi Outlanderi mootorid - tehnilised andmed
Kõik kolm krossoveri jaoks saadaolevat mootorit on varustatud MIVEC klapitõste juhtimissüsteemiga. See võimaldab muuta klappide töörežiimi (avamisaeg, faaside kattumine) sõltuvalt kiirusest, mis aitab suurendada mootori võimsust, säästa kütust ja vähendada kahjulikke heitmeid.
Mitsubishi Outlanderi mootori omadused:
| Parameeter | Outlander 2.0 146 hj | Outlander 2,4 167 hj | Outlander 3.0 230 hj |
|---|---|---|---|
| Mootori kood | 4B11 | 4B12 | 6B31 |
| Mootori tüüp | bensiin ilma turboülelaadimiseta | ||
| Toitesüsteem | hajutatud süstimine, elektrooniline süsteem MIVEC ventiili juhtimine, kaks nukkvõlli (DOHC), ajastuskett | hajutatud sissepritse, MIVEC elektrooniline klapi juhtimissüsteem, üks nukkvõll silindriploki kohta (SOHC), hammasrihma ajam | |
| Silindrite arv | 4 | 6 | |
| Silindri paigutus | in-line | V-kujuline | |
| Ventiilide arv | 16 | 24 | |
| Silindri läbimõõt, mm | 86 | 88 | 87.6 |
| Kolvikäik, mm | 86 | 97 | 82.9 |
| Kompressiooniaste | 10:1 | 10.5:1 | |
| Töömaht, kuupmeetrid cm. | 1998 | 2360 | 2998 |
| Võimsus, hj (pööretel minutis) | 146 (6000) | 167 (6000) | 230 (6250) |
| Pöördemoment, N*m (pööretel minutis) | 196 (4200) | 222 (4100) | 292 (3750) |
Mitsubishi Outlanderi nelikveosüsteem
All Wheel Control (AWC) on esiveoline konfiguratsioon, mis ühendab tagatelje elektrooniliselt juhitava elektromagnetilise siduri abil. Kuni 50% tõukejõust saab suunata tahapoole. AWC-ajamil on kolm töörežiimi – ECO, Auto ja Lock. Säästurežiimis kandub kogu pöördemoment vaikimisi esisillale ning tagasilda kasutatakse ainult libisemisel. Automaatrežiim jaotab jõudu optimaalselt, tuginedes elektroonilisele seadmele saadud andmetele (ratta kiirus, gaasipedaali asend). Lukustusrežiim suurendab tagaratastele ülekantavat pöördemomenti, mis tagab kindla kiirenduse ja stabiilsema käitumise ebastabiilsel pinnal. Peamine erinevus Locki ja Auto vahel on see, et tagarattad saavad alguses rohkem veojõudu olenemata sellest, kas libisemine tuvastatakse või mitte. 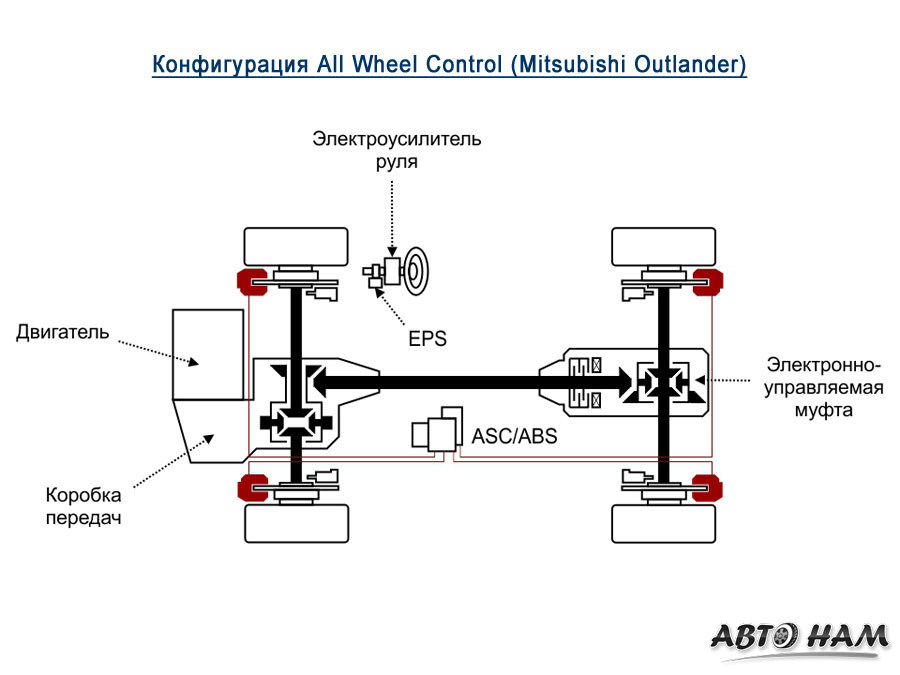
Super All Wheel Control (S-AWC) on tavapärase AWC täiustatud variant, mille puhul on esiteljele paigaldatud aktiivne diferentsiaal (AFD), mis jaotab jõu rataste vahel. Seega ilmub täiendav mehhanism auto käitumise jälgimiseks. S-AWC töö hõlmab stabiliseerimissüsteemi, ABS-i, elektrilist roolivõimendit ja pidurisüsteem. Jah, juhtseade Super süsteem All Wheel Control võib teatud tingimustel käivitada rataste pidurdamise, näiteks kurvis triivimise korral.
Selektor täistöörežiimi valimiseks S-AWC draiv Sellel on neli asendit: ökonoomne, tavaline, lumi ja lukk. Režiim “Lumi” optimeerib süsteemi sätted libedal teel sõitmiseks. 
Nelikveosüsteemis koos elektrooniliselt juhitav Olemas on kolm töörežiimi, mida saab valida lülitit keerates sõltuvalt teeoludest.
Sõidurežiimid on järgmised.
Kontrolli nelikveoline sõiduk nõuab erilisi sõiduoskusi.
Lugege hoolikalt jaotist "Nelikveosüsteemi kasutamine" ja harjutage ohutut sõitmist.
Režiim valitakse sisselülitatud süüte korral lülitit keerates.
- 4WD AUTO
- 4WD LUKK
Sõidurežiimi vahetamisel kuvatakse uus režiim multifunktsionaalse ekraani teabeaknas, katkestades ajutiselt praeguse kuva.
Mõne sekundi pärast ilmub ekraanile uuesti eelmine aken.
Hoiatus
- Sõidurežiimi vahetamine esirataste libisemisel (näiteks lumes) on keelatud. Sel juhul võib auto tõmblema ettearvamatus suunas.
- Kuival kattega teedel 4WD LOCK režiimis sõitmine toob kaasa suurenenud tarbimine kütus ja suurenenud müratase.
- 2WD režiimis ei ole soovitatav sõita, kui rattad libisevad.
See võib põhjustada käigukasti komponentide ja koostude ülekuumenemist.
Märkus
Sõidurežiimi saab vahetada nii parkimisel kui ka sõidu ajal.
Ekraaniaken ilmub süüte sisselülitamisel, seejärel kuvatakse see mõneks sekundiks pärast mootori käivitumist. 
Ekraanil kuvatakse järgmised sõidurežiimi kuvad.
| Sõidurežiim | ||
|---|---|---|
| 4WD indikaator | LOCK indikaator | |
| 2WD | VÄLJAS | VÄLJAS |
| 4WD AUTO | SEES | VÄLJAS |
| 4WD LUKK | SEES | SEES |
Hoiatus

Kõige tavalisemat "tõelist" nelikveolist disaini kasutati peaaegu kõigil esiveoliste originaalmudelitel. Diferentsiaale on kolm, keskdiferentsiaal (asub olenevalt konkreetsest paigutusest käigukasti korpuses või ülekandekasti korpuses) on blokeeritud ja pöördemoment jaotub ühtlaselt telgede vahel. See põhimõte on sarnane.
- Plussid - stabiilsus teel, käitumise suhteline etteaimatavus, hea murdmaavõime ja töökindlus.
- Puudused - viskoosse haakeseadise ebapiisav blokeerimiskoefitsient ja selle "töötamise" kiirus.
| Mudel | Modifikatsioonid |
| Lancer-Mirage-Libero | (CCxA*) luuk. 1991-1996, (CDxA) sed. 1991-1996, (CDxW) wag. 1992-1999 |
| Lancer-Miraaž | (CLxA) 1996-2001 (luukpära), (CMxA) 1996-2000 (sedaan) |
| Lancer | Evolution IV (CN9A) 1996.09-1998.02, AYC – GSR-i võimalus |
| Lancer | Evolution V (CP9A) 1998.02-1999.01, AYC - võimalus GSR99 jaoks, ülejäänud. - LSD (RS/GSR99) |
| Lancer | Evolution VI (CP9A) 1999.01-2000.03, AYC GSR2000 jaoks |
| Galant-Emeraude-Eterna | (E7xA, E8xA) 1992-1996 |
| Galant-Legnum | (ECxA, ECxW) 1996-2003 |
| Galant-Legnum | (EC5A/EC5W) VR-4 (AYC kõigile) 1996-2002 |
| RVR | (N1xL/N2xL) 1991 - 1997.08 |
| RVR | (N6xL/N7xL) 1997.09–2003.01 |
| Vanker/Grandis | (N3xL/N4xL) 1992.06–1997.07 |
| Vanker/Grandis | (N8xL/N9xL) 1997.08 - 2002 |
| Diamante-Sigma | (F2xA) (sedaan) 1990.05-1994.11 |
| Diamante | (F4xA) (sedaan) 1994.12-2002.10 |
| GTO/3000GT | (Z1xA) 1990.10-2000.09 |
| Airtrek/Outlander | (CUxW) 2001.03-… |
[ahendada]
V.C.U.
Laienda...
Järkjärgulist eemaldumist täieõiguslikust 4WD-st toetasid kõik Jaapani autotootjad ja MMC polnud erand.
VCU (Viscous Coupling Unit) skeem sarnaneb Toyota V-Flex II-ga - selles pole keskdiferentsiaali, moment on suunatud mööda veovõlli taha, kus see paigaldatakse käigukasti ette, käivitatakse ja ühendatakse veovõlli sääre ja sisendvõll käigukast esirataste olulise libisemisega. Ülejäänud aja jääb auto esiveoliseks. Paigaldati valikuline tagumise hõõrdumise LSD-diferentsiaal.
- Plussid: lihtsus ja madal hind.
- Puudused - ebasobiv käitumine aktiivse sõidu ajal, ebapiisav blokeerimiskoefitsient, madal reageerimiskiirus.
| Mudel | Modifikatsioonid |
| Lancer-Cedia | (CSxA, CSxW) 2000.05-… |
| Mirage Dingo | (CQxA) 1999.01-2002.12 |
| Dion | (CRxW) 2000.01-… |
| eK Sport-Wagon-Classy | (H81W) 2001.09-… |
| eK aktiivne | (xBA-H81W) 2004.05 -… |
| Minica | (H12V/H15A) 1984-1988 |
| Minica | (H26A/H27A/H27V) 1990.02-1993.08 |
| Minica | (H36A/H37A) 1993.08-1998 |
| Minica | (H46A/H47A) 1998.08-… |
| Minica Toppo | (H27A/H27V) 1990.02-1993.08 |
| Minica Toppo | (H36A/H37V) 1993.08-1997.10 |
| ToppoBJ | (H46A/H47A) 1998.08-2003.08 |
| ToppoBJ lai | (H48A) 1998.08-2001.06 |
| Colt Uus | (Z2xA) 2002.11-… |
| Colt Plus Uus | (Z2xW) 2004.10-… |
[ahendada]
Mitmikvalik
Laienda...
Muidugi ei jäänud kõrvale ka praegu moekas skeem elektromehaanilise siduriga ühendatud tagasillaga, mis vastab.
 Režiimis “2WD” sõidetakse ainult esiratastega. Režiimis “4WD” on tavatingimustes esirattad sisse lülitatud, kuid olenevalt sõidutingimustest võib juhtseade pöördemomendi automaatselt tagasillale ümber jaotada. Režiimis “LOCK” (madalatel kiirustel) on sidur täielikult lukustatud ja pöördemoment jaguneb telgede vahel peaaegu võrdselt.
Režiimis “2WD” sõidetakse ainult esiratastega. Režiimis “4WD” on tavatingimustes esirattad sisse lülitatud, kuid olenevalt sõidutingimustest võib juhtseade pöördemomendi automaatselt tagasillale ümber jaotada. Režiimis “LOCK” (madalatel kiirustel) on sidur täielikult lukustatud ja pöördemoment jaguneb telgede vahel peaaegu võrdselt.
- Plussid - tagarataste ühendamine toimub "intelligentsemalt" kui VCU skeemil; Võimalik sisse lülitada kõva nelikvedu.
- Miinused - mitte väga kõrge elujõulisus; ebapiisav töö 4WD režiimis.
[ahendada]
ACD+AYC
Laienda...
Tuleb tunnistada, et maailma kõige arenenuma reisijate nelikveosüsteemi töötas välja MMC – Lancer Evolutioni erinevate põlvkondade jaoks.
Seal on keskdiferentsiaal, mis lukustub automaatselt elektrooniliselt juhitava hüdromehhaanilise siduriga (ACD) ja juht saab selle lukustuse “jäikuse” iseseisvalt valida.
Teine kõige olulisem komponent on aktiivne tagumine diferentsiaal(AYC). See võimaldab reguleerida mootorilt vasakule ja paremale tagarattale edastatavat pöördemomenti, olenevalt pinnast, rooli- ja gaasipedaali asendist, ratta kiirusest ja sõiduki kiirusest. Pöörde ajal läheb suurim pöördemoment välimisele rattale, mis tekitab täiendava pöördemomendi. Libedal või ebatasasel pinnal asendab AYC piiratud libisemisega diferentsiaali (suurim pöördemoment läheb parima haardumisega rattale). Alates Evolutsioon VIII Kasutatakse täiustatud Super-AYC diferentsiaali, mis erineb koonilise diferentsiaali asemel ja millel on tagasiside juhtahel.
- Plussid: murdmaasõiduvõime, juhitavus, maksimaalne "intelligentsus".
- Puudused - disain muutub keerulisemaks ja kallimaks.
[ahendada]
Osaline tööaeg (EasySelect)
Laienda...
 Ühte lihtsamat 4WD tüüpi (mõnedel mudelitel nimetatakse seda EasySelectiks) - pistikuga esiteljega, ilma keskdiferentsiaalita - kasutatakse algselt tagaveolistel mudelitel.
Ühte lihtsamat 4WD tüüpi (mõnedel mudelitel nimetatakse seda EasySelectiks) - pistikuga esiteljega, ilma keskdiferentsiaalita - kasutatakse algselt tagaveolistel mudelitel.
Skeem näeb ette ülekandekorpuse otsese juhtimise kangi abil. Esialgu ühendati eesmised veovõllid ratastega mehaanilised haakeseadised vabajooksuga ("rummud") manuaal- või automaatajamiga. Uuematel mudelitel ühendamise hõlbustamiseks esisild Kasutatakse ADD süsteemi, mis pneumaatilise ajamiga ühendab lahti ühe esisilla võllidest.
- Plussid - disaini suhteline lihtsus, reduktori olemasolu.
- Miinused - "4WD" režiimi saab kasutada ainult sisse lülitatud libe pind(jää, lumi, märg tee) ja piiratud aja jooksul - vastasel juhul suureneb müra ja kütusekulu, halveneb juhitavus, rehvid ja ülekandeelemendid ise kuluvad tugevalt. "Manuaalsed" jaoturid on töökindlad, kuid mitte eriti mugavad kasutada, ja automaatsed pole elujõulisuse poolest ideaalsed.
| Mudel | Modifikatsioonid |
| Pajero III | (V64W/V74W) 1999.06–… (valikuline – tagumine hübriid-LSD / DiffLock) |
| Challenger/ PajeroSport/ Montero Sport | (K9xW) 1996.05-… (valikuline – tagumine hübriid-LSD) |
| L200/Strada | (K7xT) 1996.12-… (valikuline – tagumine hõõrdumine LSD / DiffLock) |
| Delica Space Gear | (PDxW/PExW/PFxW) 1994.03-… (valikuline – tagumise hõõrdumise LSD / hübriid-LSD) |
| Pajero II | (V2xW/V4xW) 1990.10-1999.11 (valikuline – tagumise hõõrdumise LSD / hübriid-LSD / DiffLock) |
| L200/Strada | (K3xT) 1991.03-1997.05 (valikuline – tagumise hõõrdumise LSD) |
| Delica Star Wagon/L300 | 1987.09–1999.06 (P2xW/P3xW/P4xW) (valikuline – tagumise hõõrdumise LSD) |
| Pajero Mini | (H56A/H58A) 1996.06-… |
| Pajero juunior | (H57A) 1995.10-1998.04 |
| Linnakast | (U62W/U62V/U62T/U64W) 1998.11-… (valikuline – tagumise hõõrdumise LSD) |
| Town Box lai | (U66W) 1999.04–2001.06 (valikuline – tagumise hõõrdumise LSD) |
Osa Pajero III-st saadi lisavarustusena MATC (Mitsubishi Active Traction Control), dünaamiline veojõukontrollisüsteem, mis töötab nagu veojõukontrolli süsteem, ja maastikul simuleerib see esi- ja tagatelje diferentsiaalide lukustamist, pidurdades libisevat ratast. Seega paraneb 4H-režiimis maastikusõiduvõime märgatavalt, ilma et oleks vaja keskdiferentsiaalilukku. See süsteem analüüsib sõidutingimusi sensorite kaudu, mis mõõdavad kiirust, kere pöördemomenti ja külgkiirendust, samuti roolinurka ja pikisuunalist kiirendust. Puudused - DiffLockiga võrreldes vähem efektiivne, võimalik on patjade ebaühtlane kulumine, kui ABS läheb avariirežiimile, kaob lukustus.
Samuti Super Select ülekandega nn. mitme režiimiga ABS. Esi- ja tagapidureid juhitakse kolme sõltumatu kanali kaudu, mis võimaldab rakendada igale rattale täpset pidurdusjõudu. Kui aga keskdiferentsiaalilukk on sisse lülitatud, on ratastel teega erinevad haardetegurid ja sellest tulenevalt erinevad pidurdusjõud võib põhjustada käigukasti väändumist ja sõiduki vibratsiooni. Mitsubishi on selle probleemi esimest korda maailmas lahendanud, luues mitmerežiimilise ABS-i, mis töötab ka lukustatud keskdiferentsiaali režiimis.
AWC-süsteemil on kolm režiimi, mida juhib elektrooniline seade, kasutades keskkonsooli nupul olevaid käske:
- 2WD(mõnedel turgudel märgistatud 4WD ECO): Formaalselt esiveoline režiim saadab väikese pöördemomendi tagaratastele, et vähendada tagasillast lähtuvat müra. Mõnede teadete kohaselt saab selles režiimis märgatava libisemise korral pöördemomenti üle kanda ka tagasillale.
- Auto 4WD: doseerib kuni 40% pöördemomendist tagaratastele, olenevalt gaasipedaali asendist (mida tugevamini vajutada, seda rohkem sidur sulgub), esi- ja tagarataste kiiruste erinevusest (sulgub, kui libisemine ja avaneb, kui libisemist ei esine) ja sõiduki kiirust. Kui gaasipedaal on täielikult alla vajutatud, saadetakse kiirusel üle 64 km/h kuni 40% tõukejõust, pöördemomendi ülekanne väheneb 25% -ni. Reisikiirusel ühtlaselt sõites suunatakse kuni 15% pöördemomendist tagaratastele ning madalatel pööretel järskudel pööretel väheneb siduri sulgemine, tagades sujuva kurvide läbimise.
- 4WD lukk: sidur sulgub libisemist ootamata ja madalal kiirusel suunab kuni 60% pöördemomendist tagaratastele (kui kuival teel on gaasipedaal täielikult alla vajutatud) ning suurel kiirusel jaotub pöördemoment võrdselt teljed. Ka järskudel pööretel ei vähene selle režiimi tagatelje pöördemoment nii palju kui 4WD Auto puhul.
Kõigil režiimidel jätkab elektroonika siduri sulgemisastme muutmist, kuid struktuurselt ei suuda seda täielikult sulgeda, s.t. Siduris on alati libisemine ja soojuse teke. Ratastevaheliste lukkude roll on määratud stabiliseerimissüsteemile, mis pidurdab libisevaid rattaid.
| Sõidurežiim | kuiv tee | Lumine tee | ||
| Rattad | ees | tagumine | ees | tagumine |
| Kiirendus | 69% | 31% | 50% | 50% |
| kiirusel 30 km/h | kiirusel 15 km/h | |||
| 85% | 15% | 64% | 36% | |
| kiirusel 80 km/h | kiirusel 40 km/h | |||
| Ühtlane kiirus | 84% | 16% | 74% | 26% |
| kiirusel 80 km/h | kiirusel 40 km/h | |||
Seoses siduri pideva ülekuumenemisega ja suutmatusega pikka aega märgatavat koormust taluda, saab seda tüüpi ajamit pidada terviklikuks vaid väga suure venitusega ja sobib ainult juhitavuse parandamiseks kõvadel pindadel. Lisaks Outlander XL-ile, ASX-ile, kasutatakse seda ka uusimal Lanceril.
Laienda...

Komponendid ja funktsioonid:
| Komponent | Funktsioon |
| Mootori ECU | |
| ABS/ASC-ECU | Edastab CAN-i kaudu 4WD-ECU jaoks vajalikke signaale:
|
| Sõidurežiimi lüliti 2WD/4WD/LOCK | Teisendab sõidurežiimi lüliti (2WD/4WD/LOCK) asendi 4WD-ECU jaoks. |
| ETACS-ECU |
|
| 4WD-ECU | Süsteem hindab teeolusid ja saadab kõigi ECU-de ja sõidurežiimi lüliti signaalide põhjal tagaratastele vajaliku pöördemomendi. Siduri optimaalse survejõu arvutamine sõidutingimuste ja praeguse sõidurežiimi põhjal kõigi ECU-de ja sõidurežiimi lüliti signaalide põhjal. |
| 4WD töönäidiku ja lukustusindikaatori juhtimine näidikuplokis. | |
| Enesediagnostika ja tõrketaluvuse funktsioonide juhtimine. | |
| Diagnostikafunktsioonide juhtimine (ühildub MUT-III-ga). | |
| Elektrooniline siduri juhtimine | 4WD-ECU edastab hetkeoludele vastava pöördemomendi siduri kaudu tagaratastele. |
Sõidurežiimi indikaator
| Näidikuplokis olev integreeritud indikaator näitab valitud sõidurežiimi lülitusrežiimi (2WD režiimis ei kuvata).
|
| Diagnostika pistik | Diagnostikakoodide väljastamine ja side MUT-III-ga. |
Süsteemi konfiguratsioon:

Juhtimisahel:

AWC elektroonilise juhtimise elektriskeem:

Mehaaniline disain:


Elektrooniline sidurijuhtimine koosneb esikorpusest, põhisidrist, põhinukist, kuulist, juhtnukist, armatuurist, juhtsidurist), tagumisest korpusest, magnetpoolist ja võllist.
- Esikorpus on ühendatud veovõlliga ja pöörleb koos võlliga.
- Kere esiosas on põhisidur (põhisidur) ja juhitav sidur (pilotsidur) paigaldatud võllile (võllile), juhitav sidur (pilotsidur) aga nukk-piduri (pilot-nukk) kaudu.
[ahendada]
Süsteemi töö
Laienda...
Sidur lahti (2WD). Pöördemoment ülekandekorpusest edastatakse sõukruvi võlli kaudu esikorpusesse. Sest Magnetmähis on pingevaba, juhtsidur ja põhisidur ei ole sisse lülitatud ning veojõudu ei edastata tagumisele diferentsiaalivõllile ja veohammasrattale.

Sidur sisse lülitatud (4WD). Pöördemoment ülekandekorpusest edastatakse sõukruvi võlli kaudu esikorpusesse. Sest Elektromagnetiline mähis on pingestatud, luues magnetvälja tagumise korpuse, juhtsiduri ja armatuuri vahele. Magnetväli mõjub juhitavale sidurile ja liitmikele ning lülitab siduri sisse. Kui juhitav sidur on sisse lülitatud, edastatakse pöördemoment juhitavale nukkmehhanismile (pilootnukk). Vastuseks sellele jõule tõmbub peanuki pall (pilootnukk) tagasi ja tekitab edasiliikumise. See impulss mõjub põhisidurile ning pöördemoment kandub tagumise diferentsiaalvõlli ja käigukasti kaudu tagaratastele.
![]()
Tagaratastele ülekantavat pöördemomenti reguleeritakse siduri mähisele antava voolu muutmisega.
[ahendada]
[ahendada]
S-AWC ja Twin Motor 4WD
Laienda...
Koos Outlander XL (nüüd Outlander Sport) uuendusega ja Akinori Nakanishi agressiivse disaini kaotamisega asendati mudeli tippversiooni vigane AWC-ajam nn Super-AWC ehk S-AWC-ga. . Sisuliselt on tegemist modifitseeritud ACD+AYC ajamiga, millest oli juttu eespool, kus ACD keskdiferentsiaal asendatakse elektromagnetilise aktiivse LSD-diferentsiaaliga AFD ja seda on täiendatud elektrooniliste abimeestega (EPS roolisüsteem AFD tööst tulenevate tõmbluste tasandamiseks, aktiivsed ABS ja ESP süsteemid ). S-AWC on üles ehitatud veojõuvektori juhtimise põhimõttel, kui esidiferentsiaali, tagasilla siduri, pidurite ja roolivõimendi automaatjuhtimise tõttu jaotuvad kõikidele ratastele ülekantavad pöördemomendid. Peamine tegur on see, et süsteem võtab arvesse nurkkiiruse indikaatoreid.

S-AWC süsteemil on kolm konfiguratsiooni (millest ühte - originaalset ACD + AYC - peetakse võrdlusaluseks):

S-AWC käigukastis kasutatav AFD keskne LSD diferentsiaal põhineb elektromagnetilisel siduril ja on sarnaselt AYC-ga võimeline juhtima esiratastele edastatavat pöördemomenti. Lukustusmehhanismi toodab Inglise firma GKN - see tarnib ka keskmuhvi. Sidurite kokkusurumiseks rakendab nelikveo juhtseade elektromagneti mähisele voolu - ja kui esirataste pöörlemiskiirus on erinev, pöörlevad kuulsurvemehhanismi kaks ketast üksteise suhtes, luues aksiaalne jõud, mis surub sidureid kokku (nagu AWC käigukasti puhul). Diferentsiaali lukustuse astet muudetakse pidevalt elektrooniliselt, kuid jäik ühendus teljevõllide vahel on võimatu. Need. rasketes oludes pole tagasilla AYC-l vahet, sest õiget momenti sellele ei lange ja üldiselt võib tagasild ülekuumenemise tõttu igal ajal välja lülitada.

S-AWC käigukastil on neli töörežiimi:
- AWC ECO annab pöördemomendi ainult esiteljele ("kütuse säästmiseks") ja lülitub tagasiljele ainult libisemisel;
- NORMAALNE jaotab pöördemomendi optimaalselt kõikide rataste vahel vastavalt teeoludele;
- LUMI Mõeldud lumele, jääle ja muudele libedatele pindadele;
- LUKKU sulgeb kõik diferentsiaalid, pakkudes suurimat maastikupotentsiaali.
Omaette juhtum on ka variant, kus esi- ja tagatelg ei ole omavahel üldse ühendatud ja kumbki juhib iseseisvalt oma elektrimootoriga:

Siin on ka intriigi, sest... Sama Mitsubishi erinevate allikate kohaselt võib telgedel kasutada nii AYC diferentsiaale kui ka tavalisi avatud diferentsiaale. Või näiteks esisillal - avatud ja tagateljel - AYC.
Twin Motors 4WD-l on ainult kaks režiimi - "NORMAL" tavatingimuste jaoks ja "4WD LOCK" raskete tingimuste jaoks. Samal ajal, oletame, et Autoreview testid näitavad, et Twin Motor 4WD käigukast ei suuda ületada raskeid tingimusi. Sõnast "absoluutselt":
Kõigepealt läksime sinna, kus talvel on kombeks nelikvedu kasutada - lumes. Alustasime hübriidiga ja... kohe lõppes: PHEV jäi kohe kinni! ... Elektrijaama tööalgoritm on mõistatus. Vajutad gaasi ja ainult esisild pöörleb. Ja järgmisel korral hakkavad tagarattad pöörlema, kuid esirattad seisavad paigal. Vabastate parema pedaali - ja pöörlemine jätkub mõnda aega!

Mitsubishi on praktikas uurinud nelikveosüsteemide kasutamist, et teha kindlaks, milline tehnoloogiline lahendus on seda tüüpi sõidukitele kõige sobivam ja selle kompaktse krossoveri tulevastele omanikele kõige mugavam.
Insenerid pöördusid traditsioonilise lahenduse poole - nelikveoga automaatkäigukasti kasutamine "nõudmisel". Sellised süsteemid põhinevad asjaolul, et esirataste libisemisel jaotatakse osa pöördemomendist ümber tagaratastele. Mitsubishi spetsialistid mõistsid, et tarbijad olid rohkem huvitatud süsteemidest, mis vähendavad aktiivselt rataste libisemise tõenäosust.
Eelmisel Outlanderil oli püsiv nelikvedu, mille keskdiferentsiaal oli lukustatud viskoosse haakeseadise abil, 50:50 telgedevaheline veojaotus tagab suurepärase jõudluse rasketes ilmastikutingimustes, kuid kütusekulu oli igapäevaseks kasutamiseks suur. Mitsubishi püüdis anda uuele Outlanderile rasketes tingimustes sama või parema jõudluse, muutes kütusekulu näitajaid minimaalselt.
Nii ilmus MITSUBISHI AWC (All Wheel Control) nelikveoline ülekandesüsteem. All Wheel Control tähendab sõna-sõnalt inglise keelest kõigi rataste juhtimist. See süsteem võimaldab juhil valida ajami tüüpi. Süsteem on sisuliselt kombineeritud spetsiaalsest Multi-Select 4WD nelikveoülekandest ja elektroonilisest pöördemomendi jaotusest, samuti kaasaegsest veojõukontrollisüsteemist ja stabiilsuskontrollisüsteemist. Tänu AWC-süsteemile saavutatakse auto rataste suurepärane haardumine teega ja suurepärane juhitavus libedatel teelõikudel. Käigukasti optimaalse töö tagamiseks valige lihtsalt üks kolmest keskkonsoolil esitatud režiimist: “2WD”, “4WD” või “Lock”.
| Sõidurežiim | Kirjeldus | Eelised |
| 2WD | Suunab pöördemomendi esiratastele | Parem kütusesäästlikkus, väiksem sõiduki müra, parem juhitavus. See jätab ka võimaluse, et juhtplokk suunab pöördemomendi tagasillale, et vähendada selle müra. |
| Auto 4WD | Mõõdab pöördemomendi suunda tagaratastele sõltuvalt gaasipedaali asendist ning esi- ja tagarataste kiiruste erinevusest | Optimaalne pöördemomendi jaotus antud sõidutingimuste jaoks. Pöördemomendi jaotamine esi- ja tagatelje vahel toimub automaatselt elektroonilise seadme abil, sõltuvalt sõiduki sõiduparameetritest (esi- ja tagarataste kiirused, gaasipedaali asend ja sõiduki kiirus). Eelistatakse kaherattaveo režiimi. |
| 4WD lukk | Tagaratastele suunatakse 1,5 korda rohkem pöördemomenti kui 4WD režiimis | Suurendab haarduvust pinnal, tagab stabiilsuse suurel kiirusel ja parema manööverdusvõime ebatasasel või libedal pinnal. LOCK-režiim sarnaneb 4WD-režiimiga, kuid telgede vahel on muudetud pöördemomendi jaotuse seadust. Madalatel pööretel antakse tagasillale 1,5 korda suurem pöördemoment ning suurel kiirusel jaotub pöördemoment telgede vahel võrdselt. |
Kaks nelikveo režiimi
Auto 4WD
Kui valitud on 4WD Auto, jaotab Outlander 4WD süsteem pidevalt osa pöördemomendist tagaratastele, suurendades gaasipedaali vajutamisel automaatselt suhet. Sidur saadab kuni 40% jõust tagaratastele, kui gaasipedaal on täielikult alla vajutatud, ja vähendab seda 25%ni kiirustel üle 40 miili tunnis. Reisikiirusel sujuvalt sõites suunatakse kuni 15% olemasolevast pöördemomendist tagaratastele. Madalatel kiirustel kitsastes kurvides väheneb pingutus sujuvaks kurvideks.
4WD lukk
Eriti keerulistes oludes (nt lumesadu) sõitmiseks saab juht valida režiimi "4WD Lock". Kui lukk on sisse lülitatud, jaotab süsteem endiselt automaatselt pöördemomendi esi- ja tagarataste vahel, kuid suurem osa pöördemomendist kandub edasi tagaratastele. Näiteks mäel kiirendades saadab sidur suurema osa pöördemomendist kohe tagaratastele, et tagada kõigi nelja ratta veojõud. Seevastu automaatne nõudmisel kasutatav nelikvedu ootab esmalt, kuni esirattad libisevad, enne kui saadab pöördemomendi tagaratastele, mis võib kiirendamist segada.
Kuival teel tagab 4WD Lock režiim tõhusa kiirenduse. Tagaratastele suunatakse rohkem pöördemomenti, mille tulemuseks on suurem võimsus, parem juhitavus lumisel või lahtisel teel kiirendamisel ning suurem stabiilsus suurel kiirusel. Tagarataste pöördemomendi osakaal suureneb 4WD-režiimiga võrreldes 50%, mis tähendab, et kuival teel gaasipedaal täielikult alla vajutades suunatakse kuni 60% saadaolevast pöördemomendist tagaratastele. 4WD Lock režiimis ei vähene tagarataste pöördemoment kitsastes kurvides nii palju kui 4WD Auto režiimis sõites.
Eesmise/tagumise pöördemomendi suhtel 4WD režiimis on järgmised väärtused:
| Sõidurežiim | kuiv tee | Lumine tee | ||
| Rattad | ees | tagumine | ees | tagumine |
| Kiirendus | 69% | 31% | 50% | 50% |
| kiirusel 30 km/h | kiirusel 30 km/h | kiirusel 15 km/h | kiirusel 15 km/h | |
| 85% | 15% | 64% | 36% | |
| kiirusel 80 km/h | kiirusel 80 km/h | kiirusel 40 km/h | kiirusel 40 km/h | |
| Ühtlane kiirus | 84% | 16% | 74% | 26% |
| kiirusel 80 km/h | kiirusel 80 km/h | kiirusel 40 km/h | kiirusel 40 km/h | |
Struktuuriskeem

Süsteemi komponendid ja funktsioonid
|
Komponendi nimi |
Operatsioon |
|
|
|
Edastab CAN-i kaudu 4WD-ECU-le järgmised vajalikud signaalid.
|
|
|
Sõidurežiimi lüliti 2WD/4WD/LOCK |
Edastab 4WD-ECU sõidurežiimi lüliti asendisignaali. |
|
|
|
Süsteem hindab teeolusid ja iga ECU ja sõidurežiimi lüliti signaalide põhjal suunab vajaliku pöördemomendi osa tagaratastele. Arvutage optimaalne diferentsiaalpiirjõud sõiduki seisukorra ja praeguse sõidurežiimi põhjal iga ECU signaalide põhjal, sõidurežiimi lüliti juhib elektroonilisele juhtlingile edastatavat vooluväärtust. |
|
|
Näidikute juhtimine (4WD töönäidik ja lukustusnäidik) näidikuplokis. |
|
|
Haldab enesediagnostika ja tõrkekindla funktsiooni. |
|
|
Diagnostikafunktsioonide juhtimine (ühildub MUT-III-ga). |
|
|
Elektrooniline siduri juhtimine |
4WD-ECU edastab praegusele väärtusele vastava pöördemomendi tagaratastele. |
|
Sõidurežiimi indikaator
|
Näidikuplokki sisseehitatud näitab valitud sõidurežiimi lülitusrežiimi (2WD režiimis ei kuvata).
|
|
Diagnostika pistik |
Väljastab diagnostikakoodid ja loob side MUT-III-ga. |
Süsteemi konfiguratsioon

Juhtimisahel

Elektrooniline juhtimisahel 4 W.D.

Disain


Elektrooniline sidurijuhtimine koosneb esikorpusest, põhisidrist, põhinukist, kuulist, juhtnukist, armatuurist, juhtsidurist), tagumisest korpusest, magnetpoolist ja võllist.
- Esikorpus on ühendatud veovõlliga ja pöörleb koos võlliga.
- Peasidur ja juhtsidur on paigaldatud korpuse esiosasse võllile (juhtsidur paigaldatakse nuki kaudu).
- Võll on läbi hammaste ühendatud tagumise diferentsiaali veohammasrattaga.
Operatsioon
Sidur on lahti (2WD: magnetmähis on pingevaba.)

Jaotuskorpuse liikumapanev jõud edastatakse sõukruvi võlli kaudu esikorpusesse. Kuna magnetpool on pingevaba, ei ole juhtsidur ja põhisidur sisse lülitatud ning veojõud ei kandu üle tagumise diferentsiaali võllile ja veohammasrattale.
Sidur töötab (4WD: magnetpoolid pinge all.)

Jaotuskorpuse liikumapanev jõud edastatakse sõukruvi võlli kaudu esikorpusesse. Kui magnetpool on pingestatud, tekib magnetväli tagumise korpuse, mida juhib juhtsidur, ja armatuuri vahele. Magnetväli mõjutab juhitavat sidurit (pilotsidur) ja armatuur (armatuur) sisaldab sidurit (pilotsidur). Kui juhtsidur on sisse lülitatud, kandub liikumapanev jõud juhtnukile. Vastuseks sellele jõule tõmbub peanuki pall (pilootnukk) tagasi ja tekitab edasiliikumise. See impulss mõjub põhisidurile ja pöördemoment kandub tagumise diferentsiaali võlli ja käigukasti kaudu tagaratastele.
Reguleerides magnetpoolile antavat voolu, saab tagaratastele ülekantava jõu suurust reguleerida vahemikus 0 kuni 100%.



