Администратор
18702
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com) .
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.

Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.

Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC

В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.

В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.

Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.

Это выглядит так:



Спустя 80 секунд:

Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.

Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.

Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.

В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
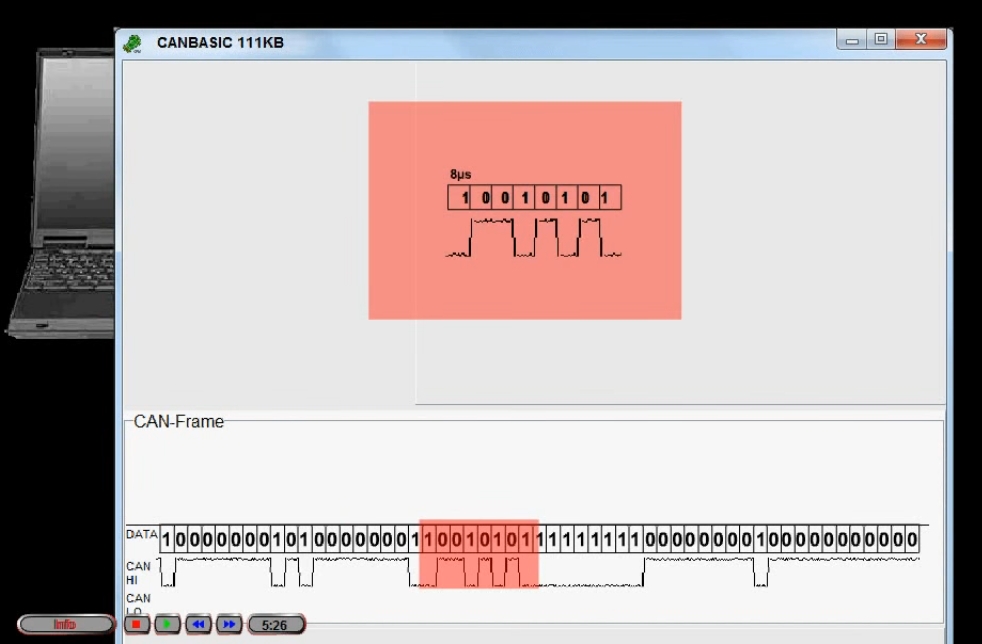
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.

Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).

Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.

Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.

Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.

С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.

Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.

Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.

В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.

Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.

Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
Диагностика и ремонт: CAN - шина
21.02.2006
Именно так выглядит (в основном) та самая "шина CAN", с которой в последнее время нам придется сталкиваться все чаще и чаще:
фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод
CAN High (оранжево-черный).
Цвет провода
CAN-Low - оранжево-коричневый.
За основной цвет шины
CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:

фото 2
CAN-High - желтым цветом
CAN-Low - зеленым цветом
Всего существует несколько разновидностей шин
CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата
(быстрый канал
).
Она позволяет
передавать информацию со скоростью)500 кбит/с и
служит для связи между блоками управления (двигатель - трансмиссия)
Шина CAN системы "Комфорт"
(медленный канал
).
Она позволяет
передавать информацию со скоростью100 кбит/с и
служит для связи между блоками управления, входящими в систему "Комфорт".
Шина данных CAN информационно-
командной системы
(медленный канал
), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь
между различными обслуживающимисистемами ( например,телефонной и навигационной системами)
.
Новые модели автомобилей все более становятся похожими на самолеты - по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и "тянуть" от каждого грозди проводов - нереально.
Поэтому кроме шины
CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем "расплываться мыслью по древу", заострим наше внимание пока что на одной конкретной шине: CAN (по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Фото 3
Когда на
High шине
CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе
Low доминантное состояние, то напряжение падает до 1.5 вольта.
("Доминанта" - явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине
CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название
Twisted Pair. А провода, которые образуют эту пару, называются
CAN High и
CAN Low.
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины
CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется "состоянием покоя" или "рецессивом".
Каким образом передаются и преобразуются сигналы по
CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:

фото 4
Поступающие по проводам
High и
Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, "шина
CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение".
Попробуем разобраться с этим.
Провода шины
CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:

Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – "
Pp") вычитается из напряжения
на проводе High (3,5 В – "
Pp") и в обработанном сигнале помеха отсутствует ("
Pp" - помеха).

Примечание: По наличию времени статья может иметь продолжение - много еще остается "за кадром".
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
Что такое CAN шина.
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).

Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д…) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.

Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.

CAN модуль
Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля. позволяет значительно сократить вмешательство в штатную электропроводку (подключения производятся всего к 6-8 проводам, вместо 15-20 в варианте без использования can шины) и позволяет избежать проблем с гарантией на электрооборудование автомобиля.
Современный автомобиль это не только средство передвижения, но и продвинутый гаджет с мультимедийными функциями и электронной системой управления агрегатами и кучей датчиков. Многие автопроизводители предлагают функции ассистентов движения, помощников при парковке, мониторинга и управления авто с телефона. Это возможно благодаря использованию в авто CAN шины к которой подключены все системы: двигатель, тормозная система, руль, мультимедиа, климат и др.
Мой автомобиль Skoda Octavia 2011 г. в. не предлагает возможностей управления с телефона, поэтому я решил исправить этот недостаток, а заодно и добавить функцию голосового управления. В качестве шлюза между CAN шиной и телефоном я использую Raspberry Pi с шилдом CAN BUS и WiFi роутер TP-Link. Протокол общения агрегатов авто закрытый, и на все мои письма предоставить документацию протокола Volkswagen отвечал отказом. Поэтому единственный способ узнать, как общаются устройства в авто и научиться ими управлять является реверс-инжиниринг протокола CAN шины VW.
Я действовал поэтапно:
- Подключение к CAN шине авто
- Голосовое управление с помощью Homekit и Siri
Разработка CAN шилда для Raspberry Pi
Схему шилда взял здесь lnxpps.de/rpie , там же и описание выводов, для общения с CAN используются 2 микросхемы MCP2515 и MCP2551. К шилду подключаются 2 провода CAN-High и CAN-Low. В SprintLayout 6 развел плату, может кому пригодится CANBoardRPi.lay (на заглавном фото прототип шилда на макетке).

Установка ПО для работы с CAN шиной
На Raspbian 2-x годичной давность мне потребовалось пропатчить bcm2708.c, чтобы добавить поддержку CAN (возможно сейчас это не требуется). Для работы с CAN шиной нужно установить пакет утилит can-utils с github.com/linux-can/can-utils , после этого подгрузить модули и поднять can интерфейс: # initialize
insmod spi-bcm2708
insmod can
insmod can-dev
insmod can-raw
insmod can-bcm
insmod mcp251x
# Maerklin Gleisbox (60112 and 60113) uses 250000
# loopback mode for testing
ip link set can0 type can bitrate 125000 loopback on
ifconfig can0 up
Проверяем, что интерфейс CAN поднялся командой ifconfig
:

Проверить, что все работает можно отправив команду и получив ее.
В одном терминале слушаем:
Root@raspberrypi ~ # candump any,0:0,#FFFFFFFF
В другом терминале отправляем:
Root@raspberrypi ~ # cansend can0 123#deadbeef
Более подробный процесс установки описан здесь lnxpps.de/rpie .
Подключение к CAN шине авто
Немного изучив открытую документацию на CAN шину VW я выяснил, что у меня используется 2 шины.Шина CAN силового агрегата , передающая данные со скоростью 500 кбит/с, связывает все обслуживающие этот агрегат блоки управления.
Например, к шине CAN силового агрегата могут быть подключены следующие приборы:
- блок управления двигателем,
- блок управления АБС,
- блок управления системой курсовой стабилизации,
- блок управления коробкой передач,
- блок управления подушками безопасности,
- комбинация приборов.
Например, к шине CAN системы «Комфорт» и информационно<командной системы могут быть
подключены следующие приборы:
- блок управления системой Climatronic или климатической установкой,
- блоки управления в дверях автомобиля,
- блок управления системой «Комфорт»,
- блок управления с дисплеем для радио и навигационной системы.
Обе шины связаны через шлюз, который находится в области под рулем, так же к шлюзу подключен диагностический OBD2 разъем, к сожаление через OBD2 разъем нельзя послушать трафик от обеих шин, можно только передать команду и запросить состояние. Я решил, что буду работать только с шиной «Комфорт» и самым удобным местом подключения к шине оказался разъем в водительской двери.

Теперь я могу слушать, все что происходит в CAN шине «Комфорт» и отправлять команды.
Разработка сниффера и изучение протокола CAN шины

После того как я получил доступ к прослушиванию CAN шины, мне нужно расшифровать кто кому и что передает. Формат пакета CAN показан на рисунке.

Все утилиты из набора can-utils сами умеют разбирать CAN пакеты и отдают только полезную информацию, а именно:
- Идентификатор
- Длина данных
- Данные
Для macOS я написал простое приложение, которое для каждого адреса устройства добавляет ячейку в табличку и в этой ячейке я уже вижу какие данные меняются.

Нажимаю кнопку стеклоподъемника я нашел ячейку в которой меняются данные, затем я и определил какие команды соответствуют нажатию вниз, нажатию вверх, удержанию вверх, удержанию вниз.
Проверить, что команда работает, можно отправив из терминала, например команду поднять левое стекло вверх:
Cansend can0 181#0200
Команды, которые передают устройства по CAN шине в автомобилях VAG (Skoda Octavia 2011), полученные методом реверс-инжиниринг:
// Front Left Glass Up
181#0200
// Front Left Glass Down
181#0800
// Front Right Glass Up
181#2000
// Front Right Glass Down
181#8000
// Back Left Glass Up
181#0002
// Back Left Glass Down
181#0008
// Back Right Glass Up
181#0020
// Back Right Glass Down
181#0080
// Central Lock Open
291#09AA020000
// Central Lock Close
291#0955040000
// Update Light status of central lock (Когда отправляешь команду открыть/закрыть замок то на кнопке управления замком светодиод не изменяет состояние, чтобы он показал реальное состояние центрального замка, нужно отправить команду обновления)
291#0900000000
Мне было лень изучить все остальные устройства, поэтому в этом списке, только то что мне было интересно.
Разработка приложения для телефона
Используя полученные команды я написал приложение для iPhone, которое открывает/закрывает стекла и управляет центральным замком.На Raspberry Pi я запустил 2 маленьких сервера, первый отправляет данные с candump в TCP/IP, второй принимает команды от iPhone и передает их cansend.

Исходники приложения управления авто для iOS
//
// FirstViewController.m
// Car Control
//
// Created by Vitaliy Yurkin on 17.05.15.
// Copyright (c) 2015 Vitaliy Yurkin. All rights reserved.
//
#import "FirstViewController.h"
#import "DataConnection.h"
#import "CommandConnection.h"
@interface FirstViewController ()
Есть способ не писать свое приложение для телефона, а воспользоваться готовым из мира умных домов, всего лишь потребуется установиться на Raspberry Pi систему автоматизации
Современный автомобиль оснащен электронными блоками управления различных систем: двигателя, антиблокировочной системы тормозов, кузова и другими. По-существу, эти блоки представляют собой микрокомпьютеры.
Для того, чтобы понять что такое CAN-шина в автомобиле, представьте что в машине организована локальная сеть, к которой подключены эти микрокомпьютеры — чтобы они работали в комплексе.
Это подобно тому, как в сеть объединяются офисные компьютеры, для того чтобы сотрудники могли без проблем брать информацию друг от друга, а начальник имел возможность оперативно контролировать работу офисных сотрудников.
В качестве начальника в автомобиле выступает бортовой компьютер и система диагностики.
История разработки и унификации Controller Area Network
Компания BOSCH, производя исследования в области автоматизации в 80-х годах прошлого века, предложила стандарт микроконтроллерной связи, который можно было применять и в автомобилестроении.
Стандарт CAN применяется не только в автомобилях. В настоящее время его используют в концепции «умный дом», промышленной автоматике и т.д.
Применительно к автомобильной технике стандарт CAN (Controller Area Network) адаптирован к шине с физическим уровнем. Она организована при помощи витой пары проводников, по которым идут пакеты сигналов разной полярности.
Такой стандарт получил международную классификацию ISO 11898. Кадр (пакет) включает 11-битный информационный сигнал (либо 29-битный в расширенном режиме).
В общем, CAN-шина не обязательно может быть реализована при помощи витой пары проводников. Это может быть и оптоволокно, и радиоканал.
Можно предположить, что с введением беспилотных транспортных средств CAN-шина трансформируется в мобильный интерфейс передачи информации одного, а возможно, и комплекса автомобилей.
CAN-шина автомобиля: что это такое и её принцип работы
Шина представляет собой локальную сеть, при помощи которой производится обмен информацией между блоками управления различными системами автомобиля. Таким образом, блок управления, например, двигателя автомобиля, помимо основного микроконтроллера, обслуживающего двигатель, предполагает наличие CAN-контроллера, который формирует посылки импульсов по двум шинам: CAN-высокий и CAN-низкий (Н и L).
Эти сигналы передаются по проводникам (витой паре) трансивером. Трансиверы, или приемо-передатчики, предназначены для:
- усиления сигналов,
- обеспечения помехозащищенности передаваемых импульсов;
- регулировки скорости передачи цифрового потока;
- защиты линии в случае повреждения CAN-шины.
Сейчас в автомобильной технике применяют следующие виды приемо-передатчиков — High Speed и Fault Toleran. High Speed трансмиттер обеспечивает относительно высокую скорость передачи информации – до 1 мегабит в секунду. Второй тип трансмиттера обладает меньшей скоростью передачи информации – до 120 килобит в секунду. Зато он менее чувствителен (толерантен к ошибкам) к качеству CAN-шины, допускает отклонение ее параметров.
Схема организации обмена данными
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:

Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.
На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.

Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.

Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
Основные режимы работы CAN-шины:
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.

Преимущества и недостатки применения КАН-шины в автомобиле
Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля.
Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя.
Основные преимущества применения CAN-шины:
- возможность проведения оперативного контроля и ;
- объединение потоков информации в едином помехозащищенном канале;
- универсальность, способствующая унификации процессов диагностирования;
- возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля).
Недостатки CAN-шины:
- невысокая надежность;
- повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения.
Устранение неисправностей
На приборной панели автомобиля отсутствует индикаторная лампа неисправности CAN. Судить о том, что работоспособность CAN-шины нарушается, можно по косвенным показателям:
- на приборной панели одновременно загорелись несколько индикаторных ламп неисправностей;
- пропали показатели температуры охлаждающей жидкости, уровни топлива;
Прежде всего, следует выполнить диагностику. Если она покажет на неисправность CAN-шины, следует приступить к устранению проблемы.
Последовательность работ:
- Найти проводники витой пары шины. Часто они имеют черный (высокий уровень) и оранжево-коричневый (низкий) цвета.
- Проверить при включенном зажигании с помощью мультиметра напряжения на проводниках. Уровни не должны быть равны 0 или более 11 Вольт (обычно около 4,5 Вольта).
- Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв.
- Приступить к поиску обрыва или короткого замыкания.
- Если есть подозрение на то, что замыкание шины происходит по причине отказа какого-либо блока управления, можно последовательно отключать блоки управления и контролировать сопротивление и работоспособность шины.
Неисправность CAN-шины относится к сложным неисправностям электрооборудования автомобиля. Если у автовладельца нет необходимых навыков ремонта электрики, то лучше воспользоваться услугами специалиста.



