Az elektromos hajtás frekvenciaszabályozásának tervezésekor megfelelő modelleket kell készíteni, amelyek teljes mértékben figyelembe veszik a motorban zajló elektromechanikus folyamatok sajátosságait. A modellek teszteléséhez össze kell hasonlítani azokat egy valós berendezéseken fizikailag megvalósított folyamattal, ezért meg kell határozni a valódi villanymotorok paramétereit a modell megfelelőségének ellenőrzéséhez. A cikk egy aszinkron villanymotor vektorvezérlésének matematikai modelljét írja le. A modell lehetővé teszi az elektromechanikus folyamatok nyomon követését az elektromos motorban működése során. Grafikonok készültek az elektromos motor beindítását jellemző mechanikai és elektromos tranziens folyamatokról. A vektorvezérlésű villanymotor mechanikai karakterisztikája készült, amely jól mutatja a terhelési tartomány növekedését. A modell megfelelőségét értékelték. A matematikai kísérleteket és a modellalkotást a Simulink grafikus szimulációs környezetben, a Matlab csomaghoz tartozó alkalmazásban végeztük.
inverter
matematikai modell
mechanikai jellemzők
vektorvezérlés
aszinkron motor
1. Vinogradov A.B. Váltakozó áramú elektromos hajtások vektorvezérlése / Ivanovo Állami Energiatudományi Egyetem V.I. Lenin". – Ivanovo, 2008. – 297 p.
2. Likhodedov A.D. Az aszinkron motor mechanikai jellemzőinek felépítése és tesztelése // A tudomány és az oktatás modern problémái. – 2012. – 5. sz. – URL: http://www..2012.09).
3. Usoltsev A.A. Aszinkron motorok vektorvezérlése: tankönyv az elektromechanikus ciklus tudományágairól. – Szentpétervár, 2002.
4. Shuvalov G.A. Villamosenergia-megtakarítás frekvenciaváltóval // Elektromos berendezések: üzemeltetés és javítás. – 2012. – 2. sz.
5. Blaschke, F. Das Prinzip der Feldorientierung, die Grundlage für die Transvector-Regelung von Drehfeldmaschinen (németül), Siemens-Zeitschrift 45, Heft 10, 1971.
6. PLC - ez egyszerű!! Vektoros vezérlés. – URL: http://plc24.ru/vektornoe-upravlenie/ (elérés dátuma: 2012.12.09.).
Aszinkron elektromos hajtás fejlesztése vektorvezérléssel
A félvezető frekvenciaváltókat energiaátalakítóként használó váltakozó áramú elektromos hajtások vezérlésének két fő módszerét szokás megkülönböztetni: frekvencia és vektor.
Frekvenciaszabályozással a frekvenciaszabályozás egyik statikus törvénye valósul meg az elektromos hajtásban (például , stb.). A vezérlőrendszer kimenetén egy feladat generálódik az inverter kimeneti feszültségének frekvenciájára és amplitúdójára. Az ilyen rendszerek alkalmazási köre: aszinkron elektromos hajtás, amely nem igényel megnövekedett statikus és dinamikus követelményeket, ventilátorok, szivattyúk és egyéb általános ipari mechanizmusok.
A vektorvezérléssel a vezérlés a változók pillanatnyi értékei alapján történik. A digitális vektoros rendszerekben a vezérlés ekvivalens (a szabályozási diszkrét intervallumon átlagolható) változók használatával hajtható végre.
1971-ben Blaschke javasolta az aszinkron motor vezérlőrendszerének felépítésének elvét, amely a motor vektoros modelljét használta a koordinátarendszernek a rotor fluxuskapcsolata mentén történő orientálásával. Ezt az elvet közvetlen nyomatékszabályozásnak is nevezik. A vektorvezérlés lehetővé teszi a szabályozási tartomány, a szabályozási pontosság és az elektromos hajtás sebességének jelentős növelését. Ez a módszer a motor nyomatékának közvetlen szabályozását biztosítja.
A nyomatékot az állórész árama határozza meg, amely izgalmas mágneses teret hoz létre. A nyomaték közvetlen szabályozásánál az amplitúdó mellett meg kell változtatni az állórész áramának fázisát, vagyis az áramvektort. Innen származik a „vektorvezérlés” kifejezés.
Az áramvektor, és ennek következtében az állórész mágneses fluxusának a forgó rotorhoz viszonyított helyzetének szabályozásához bármikor tudni kell a forgórész pontos helyzetét. A problémát vagy külső forgórész helyzetérzékelővel, vagy a forgórész helyzetének más motorparaméterek felhasználásával végzett számításokkal történő meghatározásával lehet megoldani. Ezek a paraméterek az állórész tekercseinek áramát és feszültségét használják.
Olcsóbb egy változtatható frekvenciájú elektromos hajtás vektorvezérléssel, fordulatszám-visszacsatoló érzékelő nélkül, de a vektorvezérlés nagy volumenű és nagy sebességű számításokat igényel a frekvenciaváltótól. Ezenkívül a közvetlen nyomatékszabályozáshoz alacsony, nullához közeli fordulatszámon a változtatható frekvenciájú elektromos hajtás sebesség-visszacsatolás nélküli működtetése lehetetlen. A fordulatszám-visszacsatoló érzékelővel ellátott vektorvezérlés akár 1:1000-es és magasabb szabályozási tartományt biztosít, a fordulatszám-szabályozás pontossága százszázalékos, a nyomatékpontosság néhány százalék.
Az IM és SM áramellátása vektorvezérlési módban egy inverterről történik, amely bármikor képes biztosítani az állórész feszültség (vagy áram) vektorának szükséges amplitúdóját és szöghelyzetét. A rotor fluxus kapcsolódási vektorának amplitúdóját és helyzetét megfigyelővel mérik (egy olyan matematikai berendezés, amely lehetővé teszi a rendszer nem mért paramétereinek visszaállítását). Az elektromos hajtás működési körülményeitől függően lehetséges a villanymotor vezérlése mind normál pontosságú, mind a fordulatszám- vagy nyomatékfeladat feldolgozásának fokozott pontosságú üzemmódjaiban. Például egy frekvenciaváltó ±2-3%-os forgási sebesség tartását biztosítja U/f módban, vektorvezérléssel fordulatszám-érzékelő nélkül ±0,2%, teljes vektorvezérléssel fordulatszám-érzékelővel ± ±2-3%-os pontossággal. 0,01% biztosított.
Az IM vektorvezérlésének általános elve
A jövőben a következő koordinátarendszer-indexeket fogjuk használni: a-b - rögzített koordinátarendszer (), az állórész tekercsének a fázisának tengelye mentén orientálva; x-y - koordinátarendszer, amely szinkronban forog a rotorral () és a tekercsének a fázistengelye mentén helyezkedik el; d-q - a rotor fluxus-rudazatával () szinkronban forgó és annak irányába orientált koordinátarendszer; m-n egy tetszőleges orientált koordinátarendszer, amely tetszőleges sebességgel forog.
Az IM vezérlőrendszer modellezésének és felépítésének általános elve az, hogy erre a célra egy koordinátarendszert használnak, amely állandóan orientált bármely, az elektromágneses nyomatékot meghatározó vektor irányába. Ekkor ennek a vektornak a másik koordinátatengelyre való vetülete és az elektromágneses nyomaték kifejezésében a megfelelő tag nulla lesz, és formálisan olyan formát ölt, amely megegyezik az egyenáramú motor elektromágneses nyomatékának kifejezésével, amely arányos az armatúra áramához és a fő mágneses fluxushoz viszonyítva.
Abban az esetben, ha a koordinátarendszer a forgórész fluxus-rudazata mentén helyezkedik el ( ![]() ) a pillanat a következőképpen ábrázolható:
) a pillanat a következőképpen ábrázolható:
![]() , (1)
, (1)
ahol a forgórész áramkör szivárgási induktivitása, a mágnesező áramkör induktivitása, a póluspárok száma, és az állórész áramainak vetülete a koordináta-rendszer tengelyeire.
Ezzel a kifejezéssel, feltéve, hogy a forgórész fluxus kapcsolódása állandó, lehetséges az elektromágneses nyomaték szabályozása az állórész áramának a keresztirányú tengelyre való vetületének megváltoztatásával. A vezérlőrendszer felépítéséhez szükséges egyenlet megválasztása nagy szerepet játszik, mert sok mennyiség, főleg rövidzárlatos vérnyomás esetén, nem mérhető. Ráadásul ez a választás jelentősen befolyásolja a rendszerátviteli függvények összetettségét, esetenként többszörösére növelve az egyenletek sorrendjét.
Az IM vektorvezérlő rendszer felépítéséhez ki kell választani azt a vektort, amelyhez viszonyítva a koordináta-rendszer orientálódik, és az elektromágneses nyomaték megfelelő kifejezését, majd meg kell határozni a benne szereplő mennyiségeket az állórész és/vagy az egyenletekből. rotor áramkör (2):
![]() , (2, a)
, (2, a)
![]() , (2, b)
, (2, b)
ahol az állórész tekercseinek feszültsége vektor formában; - az állórész és a forgórész tekercseinek aktív ellenállása; az alkatrészek a fluxuskapcsolat időbeli változásaihoz kapcsolódnak az áramok időbeli változásai miatt, és transzformációs EMF-nek nevezik őket, a megfelelő elektromos gépben a gerjesztési folyamatok analógiájára; komponensek , - a fluxus-összeköttetésben a forgórész forgása miatti változáshoz kapcsolódnak, és rotációs emf-nek nevezik.
Ha referenciavektornak a forgórész fluxuskapcsolóját választjuk, és a koordinátarendszert ennek mentén úgy irányítjuk, hogy valós tengelye egybeessen az iránnyal, akkor a koordinátarendszer forgási szögfrekvenciája megegyezik az állórész betáplálásának szögfrekvenciájával, mivel Az állórész és a forgórész fluxusvektorai azonos frekvencián forognak. A forgórész fluxus kapcsolódási vektorának alkalmazása elméletileg nagyobb túlterhelési kapacitást biztosít az IM számára.
Ebben az esetben az állórész áramvektorának vetületei, figyelembe véve azt a tényt, hogy , egyenlőek:
![]() (3)
(3)
ahol a forgórész elektromágneses időállandója.
Adjuk meg a forgórész fluxus kapcsolását és szögfrekvenciáját:
![]() (4)
(4)
Így az állórészáram vetületének felhasználásával a forgórész fluxuskapcsolata vezérelhető, és ennek a csatornának az átviteli függvénye egy időszakos kapcsolatnak felel meg, amelynek időállandója megegyezik a forgórész időállandójával; a vetítés segítségével pedig önállóan és tehetetlenségmentesen szabályozható a forgórész frekvencia.
Ebben az esetben az IM elektromágneses nyomatéka meghatározható a forgórészáramok frekvenciájának ismeretében egy adott fluxuskapcsolathoz:
![]() , (5)
, (5)
Kifejezések - meghatározzák az állórész áramának a koordinátatengelyekre való vetületei, a fluxuskapcsolat, a forgórész frekvencia és az IM elektromágneses nyomatéka közötti kapcsolatot. A mozgás kifejezéséből és egyenletéből következik, hogy a nyomaték tehetetlenség nélkül szabályozható két bemeneti jellel: a fluxus kapcsolással és a forgórész frekvenciájával. Ezek a jelek az állórész áramvektor vetületeihez kapcsolódnak kifejezésekkel. Ezért a vektorvezérlő eszköz tartalmaz egy koordináta-lecsatoló egységet (RC), amely a (3) kifejezéseknek megfelelően transzformációkat hajt végre, valamint egy forgatót, amely az állórész áramvektorát az IM rotor forgásával ellentétes irányba forgatja. A vezérlőkészülék bemeneti jelei a lineáris hálózati feszültség és a tápfeszültség frekvenciája, amely megfelel a fluxus kapcsolatának és a forgórész frekvenciájának. A koordináta-lecsatolás blokk elnevezése az állórész áramvektor független (lecsatolt, szeparált) vetületeinek megfelelő jelek generálásának funkciójából származik (1. ábra).

Rizs. 1. A koordináta-leválasztási mondat blokkvázlata.
Az elektromágneses nyomaték (5) kifejezéséből és az általános mozgásegyenletből megkaphatjuk az IM átviteli függvényét a forgórész frekvenciavezérlő csatornán keresztül:
hol van a mechanikai időállandó. Ez az átviteli funkció teljes mértékben összhangban van egy egyenáramú motorral, így az IM vektorvezérlésű elektromos hajtásrendszerek felépítése nem különbözik az egyenáramú hajtásoktól.
Megjegyzendő, hogy a vezérlőkészülék csak akkor tudja ellátni a funkcióit, ha a linkjei átviteli funkcióiban szereplő IM paraméterek megfelelnek a valós értékeknek, ellenkező esetben a fluxus kapcsolódása és a forgórész frekvenciája az IM-ben és a vezérlőkészülékben különböznek egymástól. Ez a körülmény jelentős nehézségeket okoz a vektorvezérlő rendszerek gyakorlati megvalósítása során, mert a vérnyomás paraméterei működés közben változnak. Ez különösen érvényes az aktív ellenállások értékére.
Koordinátatranszformációk matematikai leírása
Ha az aktuális vektort rögzített koordinátarendszerben (a, b) mutatjuk be, akkor az átmenet egy új koordinátarendszerre (x,y), az eredetihez képest egy bizonyos szöggel elforgatva (2a. ábra) történik. a komplex számok argumentumainak következő összefüggése:
Vagy ![]() (7)
(7)

Rizs. 2. Általánosított áramvektor különböző koordinátarendszerekben.
Állandó szögfrekvenciával forgó koordinátarendszer esetén a szög egyenlő.
A koordináta-transzformáció kiterjesztett formában a következőképpen írható fel:
Innen megtalálod a vektor komponenseit mátrix formában:
![]() , (9)
, (9)
ahol , a megfelelő tekercsek áramának pillanatnyi értékei.
Az IM vektorvezérlő rendszer szükséges eleme egy rotátor, amely a (9) kifejezésnek megfelelően transzformálja a vektorkoordinátákat.
A változók (d,q) koordinátarendszerből (a, b) koordinátarendszerbe történő transzformációjához a következő egyenleteket használjuk:
ahol γ a mező tájolási szöge. A rotátor blokkvázlata a 3. ábrán látható.

Rizs. 3. A rotátor blokkvázlata.
A vérnyomás matematikai modellje
Az aszinkron motor modellezése az α, β koordinátarendszerben történik. Az ennek a koordinátarendszernek megfelelő egyenleteket a következő egyenletrendszer írja le:
 (11)
(11)
ahol: , , , - az állórész és a forgórész fluxuskapcsolási vektorainak összetevői koordinátarendszerekben; , - az állórész feszültségvektorának összetevői koordinátarendszerekben; - az állórész és a forgórész tekercseinek aktív ellenállása; - az állórész és a forgórész tekercseinek összes induktivitása (17), (18); - az állórész és a forgórész elektromágneses csatolási együtthatói (12), (13); p - póluspárok száma; - a forgórész mechanikai fordulatszáma; J a motor forgórészének tehetetlenségi nyomatéka; - ellenállási nyomaték a motor tengelyén.
A tekercsek teljes induktivitásának és az állórész és a forgórész elektromágneses csatolási együtthatóinak értékeit a következő képletekkel számítják ki:
ahol: - szivárgási induktivitás; - a mágnesező áramkör induktivitása,
ahol: - az állórész és a forgórész tekercseinek induktív szivárgási ellenállása; - a mágnesező áramkör induktív reaktanciája; f az állórészre táplált feszültség frekvenciája.
Egy differenciálegyenlet-rendszer (11) koordinátákban történő megoldásával olyan dinamikus mechanikai karakterisztikát és állapotváltozók időkarakterisztikáját kaphatjuk meg (például nyomaték és fordulatszám), amelyek képet adnak a motorban lezajló folyamatokról. . A motor állórész tekercsére táplált feszültség összetevőit a következő képlettel számítjuk ki:
![]() (19)
(19)
ahol U az állórészre táplált feszültség effektív értéke.
Az egyenletek megoldása a rendszer egyes differenciálegyenletek bal és jobb oldalának integrálásával jár:
 (20)
(20)
Az aktuális függőségeket a következő egyenletek segítségével számítjuk ki:
 (21)
(21)
Az AD DMT f 011-6у1 útlevél adatait a cikk tartalmazza.
A 4. ábra az állórész áramával vezérelt IM modelljét mutatja koordinátarendszerben, amely a forgórész fluxuskapcsolója mentén helyezkedik el.

Rizs. 4. IM vektorvezérlési modell a Simulink környezetben:
AD - aszinkron motor;
УУ - vezérlőkészülék, beleértve: RK - koordináta-leválasztó egység, R - rotátor;
N a terhelés, amely a csapágyak ellenállását is figyelembe veszi.
Az IM vektorvezérlési modell lehetővé teszi az aszinkron motorban a működése során fellépő elektromágneses folyamatok nyomon követését.
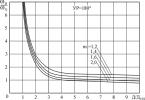
Az alábbi grafikon (5. ábra) egy vektorvezérlésű villanymotor modellezéssel kapott mechanikai jellemzőit mutatja, összehasonlítva a vezérlő nélküli villanymotor teljes körű kísérletben kapott mechanikai jellemzőivel.

Rizs. 5. Mechanikai jellemzők összehasonlítása.
A grafikonon látható, hogy vektorvezérléssel az aszinkron motor mechanikai karakterisztikája merev lesz, aminek következtében a túlterhelési tartomány kitágul. A 0-tól 153 Nm-ig terjedő tartományban a karakterisztikus értékek kissé eltérnek, a hiba mindössze 1,11%, ezért az így kapott matematikai modell megfelelően tükrözi a valós motor működését, és felhasználható a mérnöki gyakorlatban végzett kísérletekhez.
Következtetés
A vektorvezérlés használata lehetővé teszi az elektromos motor elektromágneses nyomatékának közvetlen szabályozását a tápfeszültség amplitúdójának és fázisának megváltoztatásával. Az aszinkron motor vektorvezérléséhez először le kell redukálnia egy egyszerűsített kétpólusú gépre, amelynek két tekercselése van az állórészen és a forgórészen, amelyek szerint az állórészhez, a forgórészhez és a mezőhöz koordinátarendszerek kapcsolódnak. A vektorvezérlés egy állítható villanymotor matematikai modelljének jelenlétét jelenti a vezérlőkapcsolatban.
A leírt modell működéséből kapott mechanikai jellemzők megerősítik a vektorszabályozásra vonatkozó elméleti információkat. A modell megfelelő és használható további kísérletekhez.
Ellenőrzők:
Shvetsov Vladimir Alekseevich, a műszaki tudományok doktora, a RES KamchatSTU Tanszék professzora, Petropavlovsk-Kamchatsky.
Potapov Vadim Vadimovich, a műszaki tudományok doktora, a Távol-keleti Szövetségi Egyetem professzora, Petropavlovsk-Kamchatsky.
Bibliográfiai link
Likhodedov A.D., Portnyagin N.N. EGY ASZINKRON ELEKTROMOS MEGHAJTÁS VEKTORSZABÁLYOZÁSÁNAK MODELLEZÉSE // A tudomány és az oktatás modern problémái. – 2013. – 1. sz.;URL: http://science-education.ru/ru/article/view?id=8213 (Hozzáférés dátuma: 2020.02.01.). Figyelmébe ajánljuk a Természettudományi Akadémia kiadója által kiadott folyóiratokat
Az elektromos motorok statikus és dinamikus (tranziens) üzemmódban történő kiváló minőségű vezérléséhez szükség van a motor nyomatékának gyors közvetlen szabályozására.
Bármely motor nyomatékát az egyes időszakokban a két nyomatékot generáló összetevő nagysága (amplitúdója) és fázisa határozza meg: az áram és a mágneses fluxus. Az IM-ben az állórész és a forgórész áram- és fluxuskapcsolatai azonos fordulatszámmal forognak, eltérő, időben változó fázisparaméterekkel rendelkeznek, és nem tartoznak közvetlen mérésnek és vezérlésnek. Az IM-ben elérhető vezérelt változó az állórész árama, amelynek vannak olyan összetevői, amelyek a mágneses fluxust és nyomatékot alkotják. E két komponens fázisorientációja csak külső vezérlőkészülékkel érhető el, ebből adódik a „vektorvezérlés” kifejezés.
Az elektromos hajtás felépítésében a motort elektromechanikus EMF konverternek tekintik idealizált motor formájában. Forgórésze nem rendelkezik tömeg- és mechanikai energiával, nincs mechanikai energiavesztesége, és mereven kapcsolódik a valódi fizikai forgórészhez, amely az elektromos hajtás mechanikai részéhez tartozik. Egy ilyen motort egy elektromechanikus többterminálos hálózat ábrázolhat, amely n tekercsszám szerint n pár elektromos vezetéket és egy pár mechanikus vezetéket tartalmaz (lásd 2. ábra). A mechanikus kapcsokon az energia sebességi elektromechanikus átalakítása (EMT) eredményeként w az M elektromágneses nyomaték alakul ki Az M nyomaték az EMF kimeneti értéke és az elektromos hajtás mechanikai részének bemeneti értéke. Sebesség w a mechanikai rész mozgási körülményei határozzák meg, de az EMF esetében független változónak tekinthető. Mechanikai változók MÉs w csatlakoztassa az EMF-et a mechanikus részhez egyetlen összekapcsolt rendszerré. A motorban lezajló összes folyamatot az elektromos egyensúlyi egyenletrendszer (az egyenletek száma megegyezik a tekercsek számával) és az elektromechanikus energiaátalakítás egyenlete írja le. Ehhez az elektromos berendezések elméletében egy általánosított elektromos gép kétfázisú modelljét használják (lásd az 1. ábrát), amelyre abszolút minden típusú és típusú elektromos gép redukálódik:
1. ábra – Az általánosított EMF modellje.
α, β – rögzített állórésztengelyek; d, q– a forgórész forgó tengelyei; φ – rotor forgási szöge; — a forgórész szögsebessége;
Elektromos egyensúly egyenlet én- tekercsek:
2. ábra – Vektorvezérlő áramkör
A vektorvezérlő áramkör három fő funkcionális részből áll:
BRP– változó szabályozók blokkja;
BVP– változó számítási blokk;
BZP– blokk a változók beállításához;
A bejáratnál BRP sebesség és áramlás parancsjelek, valamint visszacsatoló jelek (a kimenetről BVP) – az állórész áramának, a forgórész fluxus kapcsolásának és a fordulatszámnak az összetevőinek mezőorientált értékei. BRP fluxus-, nyomaték- és áramszabályozó készletet tartalmaz, amelyek kimenetén az állórészáram összetevőinek beállítására szolgáló mezőorientált jelek is generálódnak.
BZP a meghatározó fázis- és koordinátatranszformációit végzi el d – q változókat a háromfázisú vezérlőjelrendszerbe PWM AIN. Blokk BVP kiszámítja az amplitúdó- és fázisparaméterek aktuális értékeit d – q IM változók, amelyek a megfelelő érzékelők kimenetéről érkező valós háromfázisú IM áram- és feszültségjelek fázis- és koordináta transzformációit hajtják végre.
A blokk által végrehajtott koordináta-transzformációk BVP, az IM állórész háromfázisú rendszerének valós koordinátáiról a tengelyekkel való átmenetből áll d,q(transzformáció 3 → 2). Blokk BZP inverz koordináta transzformációkat hajt végre (2 → 3), tól d— q Nak nek a, b, c.
A fázistranszformációk ezekben a blokkokban biztosítják a változók fázisparamétereinek összerendelését két koordinátarendszerben.
Az ED jellemzők megbízhatóságát, költségét és minőségét befolyásolja a mért paraméterek száma és a mérési pontosság. A vérnyomás vektoros szabályozásához a méréshez rendelkezésre álló négy változó közül legalább kettőt meg kell mérni:
- IM állórészáramok;
- Feszültség az IM kapcsokon;
- Az IM rotor szögsebessége;
- Az IM rotor szöghelyzete;
A vektorvezérlés lehetővé teszi a maximális cos φ IM elérését szinte bármikor, a forgórésznek az állórészhez viszonyított bármely helyzetében, bármilyen szögsebességnél és a gép terhelésénél. Ez viszont jelentősen növeli a hatékonyságot és a nyomatékot. gép, amely ebben az esetben gyakorlatilag nem függ a motor szögsebességétől.
Az elektromos hajtás állandó fordulatszámának bármilyen változtatása vagy fenntartása célzottan szabályozza a motor által kifejlesztett nyomatékot. A nyomaték a motor egyik része által létrehozott áramlás (fluxus kapcsolat) és a másik rész áramának kölcsönhatása eredményeként jön létre, és ennek a két térbeli nyomatékgeneráló vektornak a vektorszorzata határozza meg. Ezért a motor által kifejlesztett nyomaték nagyságát az egyes vektorok moduljai és a köztük lévő térszög határozza meg.
Építéskor skaláris vezérlőrendszerek A nyomatékgeneráló vektoroknak csak a számértékeit (moduljait) vezérelték és szabályozták, de a térbeli helyzetüket nem. A vektorvezérlés elve abban rejlik, hogy a vezérlőrendszer vezérli a forgatónyomaték-generáló vektorok számértékét és térbeli helyzetét egymáshoz képest. A vektorvezérlés feladata tehát a pillanatnyi áramértékek meghatározása és erõszakos megállapítása a motortekercsekben oly módon, hogy az áramok és fluxuskapcsolatok általánosított vektorai olyan helyet foglaljanak el a térben, amely biztosítja a szükséges elektromágneses nyomaték létrehozását.
A motor által generált elektromágneses nyomaték:
ahol m a tervezési tényező; , 2 - térbeli
nyomatékot képező áramok vagy fluxuskapcsolatok vektorai; X- momentumgeneráló vektorok közötti térszög.
Amint a (6.53) pontból következik, a nyomatékot alkotó áramok (fluxus kapcsolatok) minimális értékei a szükséges nyomatékértékhez tartoznak, ha a vektorok xés 2 merőlegesek egymásra, azaz. X = °.
A vektorvezérlő rendszerekben nincs szükség a vektorok abszolút térbeli helyzetének meghatározására, és 2 az állórész vagy a forgórész tengelyéhez képest. Meg kell határozni az egyik vektor helyzetét a másikhoz képest. Ezért az egyik vektort a következőnek tekintjük bázis, a másik helyzete pedig szabályozza a szöget X.
Ez alapján a vektorvezérlő rendszerek felépítésénél célszerű az elektromágneses és elektromechanikus folyamatok matematikai leírásából kiindulni, amelyet az alapvektorhoz (koordináták) kötött koordinátákkal fejeznek ki. És- v) Ilyen matematikai leírást az 1.6.
Ha bázisvektornak vesszük és a koordinátatengelyt irányítjuk És e vektor mentén, akkor (1.46) alapján a következő egyenletrendszert kapjuk:

Ezekben az egyenletekben? v = , mivel a vektor egybeesik a koordinátatengellyel És.
ábrán. A 6.31. ábra a tengelyekben lévő áramok és áramlási kapcsolatok vektordiagramját mutatja És- v ^koordináta orientáció És a rotor csatolási vektora mentén. A vektordiagramból az következik

Rizs. B.31. A fluxuskapcsolatok és áramok tengelyekben vektordiagramja u-v nál nél M
Állandó (vagy lassú változtatással) p rotor tengelykapcsoló d"V u /dt= ami azt eredményezi i és =És Г = yji u +i v = i v
Ebben az esetben a forgórész áramvektora G merőleges a rotor fluxus-rudazatára. Mivel a forgórész szivárgási fluxusa 0 lényegesen kisebb, mint a fluxus a géprésben H, t akkor, ha a forgórész fluxuskapcsolata állandó, akkor feltételezhetjük, hogy az állórész áramvektorának vetülete a v koordináta tengelyre i v egyenlő: |/"| vagy /
Az átvett koordinátarendszer előnye u-v Az aszinkron motor nyomatékának és fordulatszámának vektorszabályozási rendszerének megalkotásához a motor nyomatékát (6.54) két egymásra merőleges vektor skaláris szorzataként definiáljuk: a *P forgórész fluxuskapcsolata és az állórész áram aktív összetevője. A nyomatéknak ez a meghatározása jellemző például az egyenáramú motorok független gerjesztésére, ami a legkényelmesebb az automatikus vezérlőrendszer felépítéséhez.
Vektoros vezérlőrendszer. Az ilyen menedzsment szerkezeti diagramja a következő elveken alapul:
- ? egy kétcsatornás vezérlőrendszer a forgórész fluxus-rudazatának stabilizálására szolgáló csatornából és a fordulatszám (nyomaték) szabályozására szolgáló csatornából áll;
- ? mindkét csatornának függetlennek kell lennie, pl. az egyik csatorna szabályozott értékeinek változása nem érintheti a másikat;
- ? a fordulatszám (nyomaték) szabályozó csatorna vezérli az állórész áramkomponensét /v. A nyomatékszabályozó hurok működésének algoritmusa ugyanaz, mint az egyenáramú motorok szolga fordulatszám-szabályozási rendszereiben (lásd 5.6. §) - a fordulatszám-szabályozó kimeneti jele a motor nyomatékára való hivatkozás. Ennek a feladatnak az értékét elosztva a forgórész fluxuskapcsoló moduljával És megkapjuk a feladatot az állórész áramkomponensére én v (6.32. ábra);
- ? minden csatorna tartalmaz egy belső áramkört /v és én és jelenlegi szabályozókkal, amelyek biztosítják a megfelelő minőségi szabályozást;
- ? kapott áramértékeket én v és én és koordináta-transzformációk révén értékekké alakulnak át én aés / p kétfázisú fix koordinátarendszer a - (3 majd az állórész tekercseinek valós áramok feladatában háromfázisú koordinátarendszerben ABC;
- ? A számításokhoz és a visszacsatolás kialakításához szükséges fordulatszám, forgórész elfordulási szög és az állórész tekercsekben lévő áramok jeleit megfelelő szenzorok mérik, majd inverz koordináta transzformációk segítségével ezeknek a koordináta tengelyeknek megfelelő értékekre konvertálják. u-v.

Rizs.
Egy ilyen vezérlőrendszer nagy sebességű nyomatékszabályozást, következésképpen a lehető legszélesebb tartományban (10 000:1 felett) biztosítja a fordulatszám szabályozását. Ebben az esetben az aszinkron motor pillanatnyi nyomatékértékei jelentősen meghaladhatják a kritikus nyomaték névleges értékét.
Annak érdekében, hogy a vezérlőcsatornák függetlenek legyenek egymástól, minden csatorna bemenetére e K0MPU és e compm keresztkompenzáló jeleket kell bevezetni (lásd 6.32. ábra). Ezeknek a jeleknek az értékét az állórész áramköri egyenleteiből (6.54) találjuk meg. Kifejezve és CHK 1y-t a megfelelő áramokon és induktivitásokon (1.4) keresztül, és figyelembe véve, hogy amikor a tengely orientált És a Х / |у =0 forgórész fluxus kapcsolódási vektora mentén kapjuk:
Honnan találjuk?

Ahol disszipációs együttható.
A (6.55) helyett (6.54) és ennek figyelembevételével a vizsgált vezérlőrendszerben d x V 2u /dt = 0, megkapjuk

vagy 
új időállandók; e és e v - A tengelyek mentén forgás EMF u- v
Független mennyiségek beállításához én ésés /v-t kompenzálni kell e ésÉs e v kompenzáló feszültségek bevezetése:

A vektorszabályozás elveinek megvalósításához közvetlenül meg kell mérni vagy matematikai modell segítségével kiszámítani (becslés) a forgórész fluxus kapcsolódási vektorának modulját és szöghelyzetét. Az aszinkron motor vektorvezérlésének funkcionális diagramja a gép légrésében lévő áramlás közvetlen mérésével Hall-érzékelőkkel a 2. ábrán látható. 6.33.

Rizs. B.ZZ. Aszinkron motor közvetlen vektorvezérlésének működési diagramja
Az áramkör két vezérlőcsatornát tartalmaz: egy vezérlő (stabilizáló) csatornát a *P 2 rotor fluxus-kapcsolathoz és egy sebességszabályozó csatornát. Az első csatorna egy külső forgórész fluxus kapcsolódási hurkot tartalmaz, amely egy PI fluxus kapcsolódási vezérlőt és RP fluxus kapcsolódási visszacsatolást tartalmaz, amelynek jelét Hall-érzékelők állítják elő, amelyek mérik az áramlást a géprésben. X? T az ai tengelyek mentén (3. A valós fluxusértékek ezután a PP blokkban újraszámításra kerülnek a forgórész fluxuskapcsolójának értékeire az a és p tengelyek mentén, és a VF vektorszűrő segítségével a forgórész fluxuskapcsolójának modulusa vektor található, amely negatív visszacsatoló jelként kerül az RP fluxus-összeköttetés-szabályozóhoz, és elosztóként kerül felhasználásra a sebességszabályozó csatornában.
Az első csatornában a belső áramkör alá van rendelve a fluxuskapcsoló áramkörnek én és, tartalmaz egy PI áramszabályzót PT1 és visszacsatolást az áram aktuális értékére / 1i, amelyet az állórész fázisáramainak valós értékéből számítanak ki a PF2 fázisátalakító és a KP1 koordináta-átalakító segítségével. A PT1 áramszabályozó kimenete a feszültség beállítás Ulu, amelyhez hozzáadódik a második csatorna kompenzációs jele e kshpi(6,57). A vett feszültségbeállító jelet a KP2 koordináta- és a PF2 fázisátalakítók a frekvenciaváltó kimenetén meghatározott értékekre és feszültségfázisokra alakítják át.
A forgórész fluxusrudazatának vezérlőcsatornája biztosítja, hogy a Ch* 2 fluxusrudazat állandó maradjon minden hajtás üzemmódban a megadott x P 2set érték szintjén. Ha a mező gyengítésére van szükség, a H*^ kis változási sebesség mellett bizonyos határok között változhat.
A második csatorna a motor fordulatszámának (nyomatékának) szabályozására szolgál. Tartalmaz egy külső sebességhurkot és egy alárendelt belső áramhurkot / 1у. A sebességparancs az intenzitásgenerátortól származik, amely meghatározza a gyorsulást és a szükséges sebességértéket. A fordulatszám-visszacsatolás DS fordulatszám-érzékelőn vagy forgórész szöghelyzet-érzékelőn keresztül valósul meg.
A PC fordulatszám-szabályozója arányos vagy arányos-integrált, az elektromos hajtás követelményeitől függően. A fordulatszám-szabályozó kimenete a bal/jobb motor által kifejlesztett nyomaték feladata. Mivel a forgatónyomaték egyenlő a forgórész fluxuskapcsoló H / 2 áramának szorzatával, akkor a nyomaték beállítási értékének elosztásával a DB felosztási blokkban M vissza a Ch / 2-n megkapjuk az árambeállítási értéket, amely a PT2 áramszabályozó bemenetére kerül. A további jelfeldolgozás hasonló az első csatornához. Ennek eredményeként a motor tápfeszültségére fázisonkénti feladatot kapunk, amely meghatározza az általánosított állórész feszültségvektorának értékét és térbeli helyzetét minden időpillanatban!? Vegye figyelembe, hogy a - koordinátákban szereplő változókra vonatkozó jelek egyenáramú jelek, a levegőkoordinátákban lévő áramokat és feszültségeket tükröző jelek pedig váltakozó áramú jelek, amelyek nemcsak a modult, hanem a megfelelő feszültség és áram frekvenciáját és fázisát is meghatározzák.
A vizsgált vektorvezérlő rendszer jelenleg digitális formában, mikroprocesszorok bázisán valósul meg. Különféle strukturális vektorvezérlési sémákat fejlesztettek ki és széles körben alkalmaznak, amelyek részleteiben eltérnek a vizsgálttól. Így jelenleg a fluxuskapcsolatok tényleges értékeit nem mágneses fluxusérzékelők mérik, hanem a motor matematikai modelljével számítják ki, a mért fázisáramok és feszültségek alapján.
Általánosságban elmondható, hogy a vektorvezérlés a váltóáramú motorok vezérlésének leghatékonyabb módja, amely nagy pontosságot és sebességet biztosít.
Dmitrij Levkin
fő gondolat vektorvezérlés nem csak a tápfeszültség nagyságát és frekvenciáját, hanem a fázist is szabályozza. Más szóval, a térbeli vektor nagysága és szöge szabályozott. A vektorvezérlés nagyobb teljesítményű, mint a. A vektorvezérlés kiküszöböli a skaláris szabályozás szinte minden hátrányát.
- A vektorvezérlés előnyei:
- a sebességszabályozás nagy pontossága;
- a motor sima indítása és egyenletes forgása a teljes frekvenciatartományban;
- gyors reagálás a terhelés változásaira: amikor a terhelés változik, gyakorlatilag nincs sebességváltozás;
- megnövelt szabályozási tartomány és szabályozási pontosság;
- csökkennek a fűtésből és mágnesezésből eredő veszteségek, és .
- A vektorszabályozás hátrányai a következők:
- a paraméterek beállításának szükségessége;
- nagy sebesség-ingadozások állandó terhelés mellett;
- nagy számítási komplexitás.
A vektorvezérlés általános funkcionális diagramja
A nagy teljesítményű váltakozó áramú fordulatszám-szabályozó rendszer általános blokkvázlata a fenti ábrán látható. Az áramkör alapját a mágneses fluxus összekötő és nyomatékvezérlő áramkörök képezik egy kiértékelő egységgel együtt, amelyek többféleképpen is megvalósíthatók. Ebben az esetben a külső fordulatszám-szabályozó kör nagymértékben egységes, és vezérlőjeleket generál az M * nyomatékszabályozókhoz és a Ψ * mágneses fluxuskapcsolóhoz (az áramlásszabályozó egységen keresztül). A motor fordulatszáma mérhető (sebesség/pozíció) érzékelővel, vagy egy becslő segítségével mérhető, amely lehetővé teszi a megvalósítást.
A vektorszabályozási módszerek osztályozása
A huszadik század hetvenes évei óta számos nyomatékszabályozási módszert javasoltak. Nem mindegyiket használják széles körben az iparban. Ezért ez a cikk csak a legnépszerűbb kezelési módszereket tárgyalja. A tárgyalt nyomatékszabályozási módszereket szinuszos hátsó EMF-el rendelkező vezérlőrendszerekhez mutatjuk be.
A meglévő nyomatékszabályozási módszerek többféleképpen osztályozhatók.
- Leggyakrabban a nyomatékszabályozási módszereket a következő csoportokra osztják:
- lineáris (PI, PID) szabályozók;
- nemlineáris (hiszterézis) szabályozók.
| Ellenőrzési módszer | Sebességszabályozási tartomány | Sebességhiba 3,% | Nyomaték növekedési ideje, ms | Indító nyomaték | Ár | Leírás | ||
|---|---|---|---|---|---|---|---|---|
| 1:10 1 | 5-10 | Nem elérhető | Rövid | Nagyon alacsony | Lassan reagál a terhelés változásaira, és kicsi a sebességszabályozási tartománya, de könnyen kivitelezhető. | |||
| >1:200 2 | 0 | Magas | Magas | Lehetővé teszi a fő motorparaméterek - nyomaték és fordulatszám - zökkenőmentes és gyors szabályozását. Ahhoz, hogy ez a módszer működjön, információra van szükség a rotor helyzetéről. | ||||
| >1:200 2 | 0 | Magas | Magas | Egy hibrid módszer, amely a... | ||||
| >1:200 2 | 0 | Magas | Magas | Nagy dinamikájú, egyszerű áramkörrel rendelkezik, de működésére jellemző a nagy áram- és nyomatékhullámok. | ||||
| >1:200 2 | 0 | Magas | Magas | Az inverter kapcsolási frekvenciája alacsonyabb, mint más módszerek, és úgy tervezték, hogy csökkentse a veszteségeket nagy teljesítményű villanymotorok vezérlése során. | ||||
Jegyzet:
- Nincs visszajelzés.
- Visszajelzéssel.
- Állandósult állapotban
A vektorvezérlés közül a legelterjedtebb a (FOC - mezőorientált vezérlés) és a (DTC - közvetlen nyomatékszabályozás).
Lineáris nyomatékszabályozók
A lineáris nyomatékszabályozók a feszültség impulzusszélesség-modulációjával (PWM) együtt működnek. A szabályozók a mintavételi periódusra átlagolva határozzák meg a szükséges állórész feszültségvektort. A feszültségvektort végül a PWM módszerrel szintetizálják, a legtöbb esetben térvektor-modulációt (SVM) alkalmaznak. Ellentétben a nemlineáris nyomatékvezérlő áramkörökkel, ahol a jelek feldolgozása pillanatnyi értékek felhasználásával történik, a lineáris nyomatékvezérlő áramkörökben a lineáris vezérlő (PI) a mintavételi periódusra átlagolt értékekkel működik. Ezért a mintavételezési frekvencia a nemlineáris nyomatékszabályozó áramkörökben 40 kHz-ről 2-5 kHz-re csökkenthető a lineáris nyomatékszabályozó áramkörökben.
(POA, angol mezőorientált vezérlés, FOC) egy kefe nélküli váltóáramot (,) irányító vezérlési módszer, mint egy független gerjesztésű egyenáramú gép, ami azt jelenti, hogy a és a mező külön vezérelhető.
A Blaschke és Hasse által 1970-ben javasolt mezőorientált szabályozás a mechanikusan kapcsolt vezérlés analógiáján alapul. Ebben a motorban a mező és az armatúra tekercselése el van választva, a fluxuskapcsolást a mezőáram vezérli, a nyomatékot pedig az áramszabályozás vezérli egymástól függetlenül. Így a fluxuskapcsoló és a nyomatékáramok elektromosan és mágnesesen elkülönülnek.

Az érzékelő nélküli mezőorientált vezérlés általános működési diagramja 1
Másrészt a kefe nélküli váltakozó áramú motorok ( , ) leggyakrabban háromfázisú állórész tekercseléssel rendelkeznek, és az I s állórész áramvektor a fluxus és a nyomaték szabályozására szolgál. Így a mezőáram és az armatúraáram összeolvadt az állórész áramvektorába, és nem vezérelhető külön. A szétkapcsolás matematikailag megvalósítható - az I s állórész áramvektor pillanatnyi értékének két komponensre bontásával: az állórészáram I sd hosszirányú komponensére (mely létrehozza a mezőt) és az állórészáram I sq keresztirányú komponensére (nyomatékot létrehozva) forgó dq koordinátarendszerben, amely a rotormező mentén orientálódik (R -FOC – rotor fluxus-orientált vezérlés) - fenti kép. Így a kefe nélküli váltakozóáramú motor vezérlése azonos lesz a vezérléssel, és egy lineáris PI szabályozóval és térvektoros feszültségmodulációval ellátott PWM inverterrel érhető el.
A mezőorientált szabályozásnál a nyomatékot és a mezőt közvetetten, az állórész áramvektor-komponenseinek vezérlésével szabályozzák.
Az állórész áramainak pillanatnyi értékeit az αβ/dq Park transzformáció segítségével dq forgó koordinátarendszerré alakítjuk át, amihez a forgórész helyzetéről is információra van szükség. A mezőt az I sd hosszirányú áramkomponens, míg a nyomatékot az I sq keresztirányú áramkomponens szabályozza. Az inverz Park transzformáció (dq/αβ), egy matematikai koordináta-transzformációs modul, lehetővé teszi a V sα * és V sβ * feszültségvektor referenciakomponenseinek kiszámítását.

A forgórész helyzetének meghatározásához vagy a villanymotorba beépített forgórész helyzetérzékelőt, vagy a vezérlőrendszerben megvalósított érzékelő nélküli vezérlő algoritmust alkalmazzák, amely a vezérlőrendszerben rendelkezésre álló adatok alapján valós időben kalkulál információt a forgórész helyzetéről.
Az alábbi ábrán látható a térvektor-modulációval, forgatónyomaték- és fluxuskapcsolat-beállítással, visszacsatolásos, téglalap alakú koordináta-rendszerben működő közvetlen nyomatékszabályozás blokkvázlata. A PI nyomaték- és fluxuskapcsoló vezérlők kimenetei a V ψ * és V M * állórészfeszültség referenciakomponenseiként értelmeződnek az állórész mező mentén orientált dq koordinátarendszerben (angolul: stator flux-oriented control, S-FOC). Ezek a parancsok (állandó feszültségek) ezután fix αβ koordinátarendszerré alakulnak, majd a V sα * és V sβ * vezérlőértékek elküldésre kerülnek a térvektor modulációs modulba.

Közvetlen nyomatékszabályozás funkcionális diagramja térvektoros feszültségmodulációval
Kérjük, vegye figyelembe, hogy ez az áramkör tekinthető egyszerűsített állórész-mező-orientált vezérlésnek (S-FOC) áramszabályozó hurok nélkül, vagy klasszikus áramkörnek (PUM-TV, angol kapcsolótábla DTC, ST DTC), amelyben a kapcsolótábla modulátorral (SVM ), a hiszterézis nyomaték- és fluxusszabályozót pedig lineáris PI vezérlők váltják fel.
Közvetlen nyomatékszabályozás térvektor-modulációval (DTC-FCM) a nyomaték és a fluxus kapcsolat közvetlenül, zárt hurokban vezérelhető, ezért a motor fluxusának és nyomatékának pontos becslése szükséges. A klasszikus hiszterézis algoritmussal ellentétben állandó kapcsolási frekvencián működik. Ez jelentősen javítja a vezérlőrendszer teljesítményét: csökkenti a nyomatékot és az áramlási pulzációt, lehetővé téve a motor magabiztos indítását és alacsony fordulatszámon történő működését. Ugyanakkor a hajtás dinamikus jellemzői csökkennek.
Közvetlen önkormányzat
A Depenbrock 1984 októberében nyújtott be szabadalmi kérelmet a közvetlen önkormányzati módszerre. A közvetlen önkormányzatiság blokkvázlata az alábbiakban látható.
Az állórész fluxuskapcsolási parancsai ψ s * és a ψ sA, ψ sB és ψ sC áramfázis-összetevők alapján a fluxuskapcsolat-komparátorok d A, d B és d C digitális jeleket állítanak elő, amelyek megfelelnek az aktív feszültség állapotoknak (V 1 – V 6). A hiszteretikus nyomatékszabályozónak van egy d M kimeneti jele, amely meghatározza a nulla állapotokat. Így az állórész fluxus kapcsolódási szabályozója beállítja azon aktív feszültségállapotok időintervallumát, amelyek az állórész fluxus kapcsolódási vektorát egy adott pályán mozgatják, a nyomatékszabályozó pedig a nulla feszültségállapotok időintervallumát, amelyek a villanymotor nyomatékát tűrésben tartják. hiszterézis által meghatározott mező.

Közvetlen önkormányzati rendszer
- A közvetlen önkormányzati rendszer jellemzői:
- a fluxuskapcsolat és az állórészáram nem szinuszos formái;
- az állórész fluxus kapcsolódási vektora hatszögletű pálya mentén mozog;
- nincs tápfeszültség tartalék, az inverter képességei teljes mértékben ki vannak használva;
- az inverter kapcsolási frekvenciája alacsonyabb, mint a közvetlen nyomatékszabályozás kapcsolóasztallal;
- kiváló dinamika állandó és gyengített mezőtartományban.
Vegye figyelembe, hogy a közvetlen önszabályozási módszer teljesítménye reprodukálható egy 14%-os fluxus hiszterézis szélességű áramkörrel.