Az Arduino és más számítógépes alaplapokra épülő robotok létrehozásának egyik lehetősége a kész tokok használata és a saját töltelék fejlesztése. A piacon megfelelő számban találhat ilyen vázat, amely mechanikus alapot is tartalmaz (kerekek, lánctalpak, zsanérok stb.). A kész tokot átvetve teljes mértékben a robot programozására koncentrálhat. Rövid áttekintést nyújtunk az ilyen csontvázas robottestekről.
Miért van szükség robottestekre és csontvázakra?
A robot létrehozása többlépcsős folyamat, amely magában foglalja a tervezést, az összeszerelést és a programozást. A robotikai ismeretek a fizikával, a mechanikával és az algoritmizálással határosak. A feltörekvő fiatal robotikusok másként közelítenek a robotok létrehozásának minden szakaszához. Vannak, akiknek könnyebb a robot mechanikus részeit létrehozni, de a programozás nehézkes. Vannak, akik éppen ellenkezőleg, könnyen programozzák a robot viselkedésének logikáját, de a mechanikus modell létrehozásának folyamata nehézségeket okoz.
Akit nehéznek talál a mechanika tervezésének folyamata, és jobban izgatja a különféle szenzorok kiválasztásának és a robotlogika tervezésének folyamata, azoknak érdemes odafigyelniük a robotok építésének különféle mechanikai alapjaira. Elektronika nélkül árulják, valójában egy jövőbeli robot teste vagy csontváza. Csak egy „agyat” kell hozzáadni hozzájuk (például egy táblát Arduino), idegek és izmok (érzékelők és működtetők) és animálják (programozzák őket). Néha ezek az esetek még motorokat vagy érzékelőket is tartalmaznak.
Platformok 4 keréken - egy Arduino gép alapja
A kerekeken álló platform messze a legegyszerűbb és leghatékonyabb alap egy robot építéséhez. Sok különböző ilyen típusú blank kapható. Néhány közülük:
Platform robot létrehozásához Arduino-n, alumínium ötvözetből készült. A platform 4 kerékkel van felszerelve, amelyek mindegyike külön motorhoz csatlakozik. Motorok benne vannak. A platform használható autó vagy bármilyen más vezetőrobot alapjaként. A platform mérete körülbelül 20 x 20 cm A motorok csatlakoztatásához szükséges csavarok, anyák és vezetékek is megtalálhatók.
Egy ilyen alapot leendő robotjához körülbelül 75 dollárért vásárolhat a DX.com online áruházban.
Még egyet négykerekű platform Arduino alapú robot létrehozásához kerekeivel vonzza magára a figyelmet. Átmérőjük 80 mm, szélességük 60 mm, elegáns és megbízható megjelenésűek. Ennek a platformnak 1,5 mm vastag akril alapja van. A karosszéria jó stabilitással rendelkezik, és alkalmas egy gyorsan mozgó robot létrehozására. Aliexpress eladja ezt a csontváz robotot 60 dollárért. A készlet hasonló az előzőhöz - kerekek, motorok, vezetékek és csavarok már benne vannak a készletben.

Két- és háromkerekű alváz lovasrobotok létrehozásához
A következőben háromkerekű platform Arduino alapú robot létrehozásához A motorok csak két kerékhez vannak csatlakoztatva, és ez csökkenti a költségeket. A DX.com online áruházban egy ilyen alváz 20,5 dollárért kapható. Az alap átlátszó akrilból készült. Tartalmaz 2 motort, csavarokat, anyákat, vezetékeket, akkumulátorcsomagot 4 db AA elemhez. Mérete körülbelül 20 x 10 cm.

Háromkerekű platform az Arduino robothoz. Fotó: dx.com

Kétkerekű robottalp. Fotó: dx.com
Lánctalpas alváz tankokhoz Arduino-n
Lánctalpas alváz stabilabb, mint a kerekeken lévők. Ráadásul ebben a kivitelben mindössze két motor elegendő a rendszer mozgásba hozásához, ami azt jelenti, hogy az ára alacsonyabb lesz, mint a négykerekű platformoké. A lánctalpakon a leggyakoribb modell természetesen egy tank, de egy ilyen alap bármilyen alakú robot platformjává válhat.
Lánctalpas alváz robottartály létrehozásáhozArduino alapján. Tartalmaz 2 motort, sínhajtást, csavarokat, anyákat. Ennek az alváznak a méretei: 18,7 cm x 11,5 cm x 4,3 cm. Ez a lánctalpas alváz 42 dollárba kerül a DX.com online áruházban.

Lánctalpas alváz robothoz. Fotó: dx.com
Ház pók robot számára Arduino-n
Pók- a robotok meglehetősen népszerű formája, ezért is kaphatók ilyen csontvázas testek A pók kialakítása a kerekes robotokkal ellentétben bármilyen irányú mozgást tesz lehetővé.
Első pókés áttekintésünkben körülbelül 100 dollárba kerül az Aliexpressen.

Ház egy pók robotnak. Fotó: aliexpress.com
Ez a tok nem tartalmazza az elektronikát vagy a szervókat, ezeket külön kell megvásárolni. Ehhez a spider modellhez az MG 995 szervo szervohajtás használata javasolt. Vicces, hogy egy ilyen meghajtót az Aliexpress webhelyén 33 dollárért vagy 5 dollárért lehet megvásárolni (bár ebben az esetben 10 darabot kell vásárolnia). Minden mancshoz meghajtó szükséges.
Ezenkívül nagyszámú szervó vezérléséhez többcsatornás szervovezérlőre lesz szükség. A pók végső költsége meglehetősen magas lehet.
Újabb hatlábú csontváz pók robot vagy akár robotcsótány 42,5 dolláros árával keltette fel a figyelmemet. A hat fémlábas robotnak stabilnak kell lennie, bár nem túl mozgékony. Ennek a csótánynak a csontváza 24 cm hosszú, 18 cm széles és 12 cm magas Ezt a fekete robotcsótányt az Aliexpress webáruházban vásárolhatja meg.

Ház egy robotcsótány számára. Fotó: aliexpress.com
Humanoid robot keretek
A modell elég érdekesnek tűnik humanoid robot 105 dollárba kerül. Ugyancsak nincs elektronika, de bőven van hely a kreativitásnak. A humanoid robot létrehozása és az emberi járás programozása kihívást jelentő és érdekes feladat. Elkezdheti kipróbálni magát egy humanoid robot létrehozásában, ha megvásárol egy ilyen csontvázat az Aliexpress online áruház webhelyén. Ha hiszel a gyártó leírásában, akkor akár táncoló robotot is készíthetsz a keret alapján.

Shell egy humanoid robot számára. Fotó: aliexpress.com
Egy kész robot, egy kész test, vagy egy Arduino robot létrehozása a semmiből?
Kész komplett robotok Arduino tábla alapjánAlkalmasak azok számára is, akiket nem vonzanak különösebben az elektromos áramkörök. Működő robotmodell vásárlásával, pl. Valójában egy kész high-tech játék felkeltheti az érdeklődést a független tervezés és a robotika iránt. Az Arduino platform nyitottsága lehetővé teszi, hogy új játékokat készítsen ugyanazokból az alkatrészekből. Az ilyen robotok ára 100 dollár körül ingadozik, ami általában viszonylag kevés.
Befejezett ügyek, amelyeket ebben az áttekintésben áttekintettünk, nagyobb képzelőerőre és a létrejövő robotok szélesebb választékára utalnak. Ezekben nem korlátozódik az Arduino táblákra, használhat más „agyakat”. Ennek a módszernek az az előnye, hogy egy robotot a semmiből készítsen el, hogy nem kell elvonnia az anyagok keresésétől és a tervek kidolgozásától. Egy ilyen robot meglehetősen komolynak tűnik, és egy ipari robotra hasonlít.
A legérdekesebb, de véleményünk szerint a legnehezebb is teljesen független robot létrehozása. Az ócskavas anyagokból karosszéria fejlesztése, játékautók és egyéb használt felszerelések ilyen célra történő adaptálása nem kevésbé izgalmas lehet, mint egy robot viselkedésének programozása. Az eredmény pedig teljesen egyedi lesz.
Ha most kezdi az Arduino robotika tanulását, ajánljuk tanfolyamunkat
Minden ár 05/22/14.
A kivitelező jó alapként szolgál majd számos különböző projekthez. A platformon elegendő hely van érzékelők, szervók, manipulátor, lámpák és sok más felszereléséhez. Ennek alapján különféle versenyek, versenyek rendezhetők.
1. Tervezői alkatrészek készlete.

2. A motortartó felszerelése.

3. A rögzítést két csavarral és anyával rögzítjük. Nem kell túlságosan meghúzni a rögzítést, mert... ez zavarja a motor beszerelését.
Szerk. 
4. Négy rögzítőelemet kell így csavarozni.

5. Az alváz falának felszerelése.

6. Nézet a ház aljáról.

7. Négy falat kell így felszerelni, ehhez négy csavarkötésre lesz szükség.

8. Az alváz aljának nézete a falak felszerelése után.

9. Az első felső alváz platform felszerelése. A burkolatot a hornyokba helyezik, ebben a szakaszban nem használnak csavarokat.

10. A második felső alváz platform felszerelése. Mindkét platform rögzítéséhez ebben a lépésben hat csavart és anyát kell használnia.

Köszönet az ArtemKAD-nak a diagramért (lásd a fórumot).
Formátum: pdf, Méret: 13Kb
Ha a robot tömege növekszik, jobb erősebb motorokat használni. Az egyik bevált megoldás a közönséges ablakmotorok.
Formátum: jpg, Méret: 33Kb
Kényelmes LPT illesztőprogram, példákkal a Delphi projektekben való felhasználására.
Formátum: zip, Méret: 31Kb
Működő, összeszerelt és tesztelt áramkör. Bemutatásra kerülnek a kitűzési diagramok és az alkatrészek megjelenése is.
A DPM-30 egy megfordítható egyenáramú villanymotor. Katonai rádióberendezésekben (rádiórelé állomások, stb.) használják az automatikus hangoló rendszerekkel működő áramkörök beállítására Kis méretű, ezért elég erős.
Tok hossza - 5,6 cm.
Teljes hossz - 7 cm.
A tok átmérője - 3 cm.
A szabványos tápfeszültség 24...27 V. 12 V-on azonban meglehetősen megbízhatóan működik, némi teljesítményveszteséggel. A robot kormánymotorja azonban működni fog.
Az áramfelvétel 0,1 A körül van.
Formátum: jpg, Méret: 25Kb
Az első réteg a robot csontváza. Hátul egy alváz csatlakozik az alap négyszögletes keretéhez: motorral felszerelt kerekek. A kormányszerkezet háromszög alakú kerete elöl van felszerelve. A keret belsejében a rétegelt lemez padlón egy akkumulátor és két tábla található: egy feszültségátalakító és egy motorvezérlő berendezés. Az állványok kerek alapjai a tartókeret sarkaiban vannak felszerelve. Feltételezhető, hogy a felső keret eltávolítható (az alvázrendszerhez és az első réteg tápellátásához való kényelmesebb hozzáférés érdekében).
Formátum: jpg, Méret: 93Kb
Az ábra Heizerman könyvéből, a legendás Busterből származik. A fordulatszám szabályozása úgy történik, hogy a kártya bemeneteihez különböző munkaciklusú négyszögletes jeleket szolgáltatnak. A Busterben ezt egy speciális sebességszabályozó áramkör vezérli, de sikeresen emulálható LPT porttal.
Formátum: jpg (több kép)
A legegyszerűbb hajtásvezérlő áramkör. Az LPT portból érkező négy vezeték szabályozza, hogy a kormánykereket jobbra vagy balra forgatják-e, és hogy a hajtómotorokat hátra vagy előre forgatják-e.
Formátum: jpg, Méret: 51Kb
A leendő robot kormányszerkezetének blokkvázlata. Használt: tartókeret, motor, visszacsatoló érzékelők, számítógépes egér áramkör alapján aktiválva.
Formátum: jpg, Méret: 30Kb
Dokumentum az LPT port használatáról. Példák a külső eszközök ehhez a porthoz történő csatlakoztatására szolgáló diagramokra, valamint a teszteléshez használt programszöveg legegyszerűbb verziója.
Formátum: html
Egy 18650 lítium-ion cella névleges feszültsége 3,6-3,7 V. Egy teljesen feltöltött cella 4,1-4,2 V-ot termel. A minimális feszültséggel azonban ez nehezebb - a végső kisülési feszültség az akkumulátor típusától függ, és ez a szám 2,6-3,2 V között ingadozik. Még lejjebb is lemerítheti, de ez egy biztos módja az akkumulátor gyors leromlásának. Úgy döntöttem, hogy az akkumulátor által termelt feszültség becslését egy névleges-maximális tartománnyal durvítom. Aztán kiderül, hogy a két-, három- és négysoros akkumulátorból álló szerelvények a 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V tartományt adják. Egy ilyen összeállításból két feszültséget kell kapnunk – némi feszültséget a tápellátáshoz. motorok és 5 V az elektronika táplálására. A két akkumulátorból álló szerelvény 6 V-os feszültséggel tud motorokat táplálni egy lecsökkentett DC/DC átalakítóval, de a minimális feszültségérték (az akkumulátor névleges értékére kisütve 7,2 V) és a 6 V közötti különbség kb 1,2 V, ami nem lehet elég egy fokozatos DC/DC konverter stabil működéséhez - a problémák elkerülése érdekében a bemenete és a kimenete között legalább 2 V feszültségkülönbség szükséges (sőt lehet kevesebb legyen az alacsony lemorzsolódású konvertereknél, de nem fogunk rájuk koncentrálni). A három elemből álló összeállítás megfelelő számunkra, a szükséges feszültségeket lecsökkentő DC/DC konverterekkel biztosítjuk. A motorok 9 V-on hajthatók, akkor legrosszabb esetben 1,8 V különbséget kapunk, ami bőven elég. A négy elemből álló összeállítás is megfelelő, de meg kell érteni, hogy egy további akkumulátor plusz súlyt jelent és helyet foglal, bár a teljes akkumulátor energiafogyasztása is nagyobb.
A tápellátás megszervezésének második módja ugyanazon akkumulátorok párhuzamos csatlakozása és egy boost DC/DC konverter. Ezután 3,6-4,2 V-ról elektronikánál 5 V-ra, motoroknál 6-9 V-ra emelhető a feszültség. Úgy tűnik, hogy egy ilyen akkumulátor-szerelvény kapacitása könnyen változtatható új cellák hozzáadásával, de ne felejtsük el, hogy a használt akkumulátoroknak hasonló kapacitással és belső ellenállással kell rendelkezniük.
Soros vagy párhuzamos akkumulátorok töltésére/kisütésére speciális vezérlőkártyák állnak rendelkezésre. A védelmi vezérlők védik az akkumulátoregységet a túlzott töltéstől vagy kisüléstől (feszültségszabályozás), rövidzárlattól és a megengedett kisülési áram túllépésétől. Az ilyen egyszerű kártyák használatakor külső tápegységre van szükség töltőáram-korlátozással. A töltés/kisütés vezérlők önállóan tölthetik az akkumulátorokat a cc/cv módszerrel korlátozott töltőárammal. Az akkumulátorok soros csatlakoztatására szolgáló fejlett vezérlők minden akkumulátorhoz egyedi töltést is biztosíthatnak - ezek kiegyensúlyozzák az akkumulátorcellákat.
Soros akkumulátorcsatlakozási sémát választottam védőlappal és külső töltővel. A jövőben egy ilyen egyszerű vezérlőpanel helyettesíthető egy kiegyensúlyozó töltésvezérlővel. Párhuzamos bekötésnél ugyan nem kell kiegyensúlyozni, de figyelembe kell venni, hogy ha egy akkumulátor erősen elhasználódott, akkor ezt a vezérlő nem fogja tudni érzékelni, és ez tele lehet valamivel. Érdemes megfontolni azt a tényt is, hogy az egyes akkumulátorok működési módjai eltérőek lesznek. Például azonos teljesítmény fogyasztása esetén a párhuzamos csatlakozású akkumulátoroknak több áramot kell leadniuk, mint párhuzamos csatlakozással.
Ezért a 6 V névleges feszültségű és 3-9 V üzemi tartományú motorok alkalmasak 281 ford./perc fordulatszámú, 80 mA üresjárati fogyasztású motort választottam. Terhelés alatt a fordulatszám 238 ford./percre csökken, az áramerősség 380 mA-re nő, miközben a motor 2 W teljesítményt produkál és 0,5 kg*cm nyomatékot fejleszt ki. Amikor a motor leáll, a nyomaték 4 kg*cm-re, az áramerősség pedig 900 mA-re nő. Mindezeket a jellemzőket a termék egyik eladójának weboldalán feltett tábláról vettük, mivel nem találtam normális „adatlapot”.
Ház és alváz összeszerelés
Az alábbi motorokat rendeltem.
Ha ránézünk a fotóra, láthatjuk a tengelyeken a motorokból kiálló bordákat. Ezekhez a motorokhoz tengelykapcsoló- és kerekkészletet találtak.

80 mm átmérőjű kerekek, puha, szöges gumik.


Magát a talpat széles alumínium sarkokból (vagy valami hasonlóból, ami a boltokban kapható) készültem elkészíteni, aminek segítségével "oldalsó" keretet készítek, amit néhány könnyű, strapabíró fémlappal fednék le. A megfelelő helyeken lyukakat fúrnak, és szükség szerint vágják a meneteket. Először azonban úgy döntöttem, hogy utánanézek a kínai iparnak. És találtam egy készletet - egy alvázkészletet egy robot építéséhez, amely magában foglalta a karosszériát, a fent említett motorokat, tengelykapcsolókat és kerekeket, valamint egy elemtartót az AA elemek számára, egy tápkapcsolót, egy konnektort és rögzítőelemeket. Maga a test sok lyukkal rendelkezik, ami logikusan könnyebbé teszi, és ezek jelenléte minimálisra csökkenti a vízvezeték-szerelési munkát.


Megbecsülve a belső tér méretét és térfogatát (egyidejűleg a platformhoz elektronikát választottak, aminek ebbe a házba kellett volna illeszkednie), megrendeltem ezt a készletet. A megérkezett motorokon, ahogy fentebb is látható, valamiért JGA25-370-9v-281rpm-et ír. Nem értem, miért pontosan 9 V, amikor ennek az alcsoportnak a névleges értéke 6 V, de valószínűleg a kínaiak jobban tudják, mit kell írni, hogy jobban fogyjon.
Maga a tok közel 400 grammot nyom. Nehéz megválaszolni, hogy milyen anyagból készült, de nem úgy néz ki, mint a tiszta alumínium.




Távolítsa el a fedelet és szerelje be a motorokat. A motorok furatainak átmérője csak az M3-as csavarokhoz való, a pozíció beállításához nem maradt margó, de az igazság kedvéért ez nem okozott problémát - a furatok egyértelműen egybeesnek a motorház meneteivel.



Csatolásokat szerelünk be.


És rögzítse a kerekeket.


Az eredmény egy kész platform, amelynek szabad magassága körülbelül 23 mm.

Az „üresjáratú” alváz tömege alig haladta meg az egy kilogrammot. Emlékszel a képekre az egyes alkatrészek tömegének mérésével? 393+(58+85+20)*4 = 1045 gramm. Minden összeszerelve 1057 grammot nyom. 12 gramm hozzáadva 16 csavart.

Így lett, egész szép platform.

Elektromos diagram
Itt érdemes elmagyarázni egy fontos pontot, hogy miért éppen ez a bálna. A helyzet az, hogy ha magunk készítjük el a tokot, akkor a belső térfogata tetszőlegessé tehető. A megvásárolt tok egy szigorúan rögzített térfogatot biztosít számunkra, amelybe mindennek bele kell férnie. Ideális esetben tartalék is marad. Ezt kezdetben figyelembe kell venni, és meg kell érteni: a szükséges töltés belefér-e ebbe a konkrét házba vagy sem, és szükséges-e elektronika cseréje vagy más ház választása. A ház belsejébe beépítik: motorokat, akkumulátort, meghajtót a motorokhoz, tápegységet, amelyen valamilyen elektronika is található - ugyanazok a feszültségátalakítók.Világosnak tűnik, hogy pontosan mi lesz bent. De hogyan fog mindez összekapcsolódni? Ha van egy ötleted, de nem tudsz róla képet alkotni, akkor nincs ötleted. Az elektronikában kiderül, hogy két képnek kell lennie - egy vizuálisnak, amelyet már teljesen elképzelünk, és egy elektromosnak (sőt, van algoritmikus is -), amikor egy eszköz viselkedését írják le, amelyet az határozza meg. hardver és/vagy szoftver (firmware funkcionalitás) képességei).
Elég sok időt töltök munkába járással. Általánosságban elmondható, hogy megfelelő megközelítéssel egy hosszú utazást pluszba lehet fordítani könyvek olvasásával, népszerű tudományos műsorok vagy hangoskönyvek nézésével/hallgatásával, amelyeket soha nem olvasna, hallgatna vagy nézne. Ezeknek a feltételeknek köszönhetően lettem rajongó, és meghallgattam a Model összes történetét az összeszereléshez (úgy, hogy ne legyen kérdés a megjegyzésekben -). Ez alól a robotparáznaság sem volt kivétel, végiggondoltam és megrajzoltam a peron vázlatos diagramját az úton.
A diagram a OneNote-ban készült. A kép kattintható. Igen, szégyellem – a kapcsolási rajz elvtelennek tűnik. Az elmúlt három hétben nem tudtam időt szánni a cikk csiszolására, és máris felmerült a kérdés: publikáljak-e egyáltalán valamit, vagy halasszam el "későbbre". Úgy döntöttem, hogy így teszem közzé, különben a „későbbi időre” borzalmas lehet. Rajzolok normál diagramokat és kicserélem a képeket. Másrészt ez a design úgy néz ki, mint egy eredeti barkácsolás. A munkahelyen vagy otthon, amikor egy ötlet megszületik, először vegyen egy közönséges papírlapot és egy közönséges ceruzát...
Nézzük meg a sematikus ábrát, hogy mire és mivel fogunk kapcsolódni. A D1 lítium-ion akkumulátorvezérlőhöz három 18650-es akkumulátor csatlakozik. A P+ kimenet az FU1 biztosítékon és az SW kapcsolón keresztül a D3 és D4 DC/DC átalakítók bemeneteire csatlakozik. A D3 konverter feszültséget állít elő a motorok számára, D4 – az összes elektronika táplálására. Ezen konverterek kimenetei a D5 motormeghajtóhoz csatlakoznak, amelyre a motorok csatlakoznak. A bal oldali ML1, ML2 motorok az MA csatornára, a jobb oldali MR1, MR2 motorok pedig az MB csatornára csatlakoznak. A meghajtó kétcsatornás, ami azt jelenti, hogy két motorcsoportot (A és B csatorna) lehet majd vezérelni, de nem mindegyik motort külön-külön. Az ENA, ENB, IN1-IN4 portok a motorok fordulatszámának és forgásirányának szabályozására szolgálnak. A Vbat’ feszültséget előállító rezisztív áramkört úgy választjuk ki, hogy az akkumulátorcsomag Vbat feszültségének telemetriáját a 0...5 V tartományban képezze. Ha Vbat = 13 V (aminek nem szabadna így lennie, hiszen az akkucsomag maximum 12,6 V-ot tud produkálni, de nyugodtan játszottam), akkor Vbat' = 3,94 V (azaz az érték garantáltan nem megy túllépi az 5 V-os határt). Az ellenállásos áramkörön átfolyó áram 12 V-on 3,6 mA lesz, és ezeket a veszteségeket elfogadhatónak tartottam (kb. 0,1% 3000 mAh akkumulátorkapacitás mellett). A vezérlő D1 bemenetére egy külső tápellátást biztosító aljzat csatlakozik. De a diagramból látjuk, hogy a D2 relén keresztül csatlakozik.
Először is szeretném elmagyarázni egy 10 kOhm-os ellenállás jelenlétét, amely a tápcsatlakozó egyik érintkezőjét 5 V-os feszültségre húzza. Van egy három kimenetű tápcsatlakozónk. Egy pár kimenet tápfeszültséget továbbít. A harmadik kimenet tájékoztató jellegű. A negatív kimenetre zárva van (nálunk van földelve), ha nincs dugó az aljzatban, és kinyit, ha a dugót bedugják a konnektorba. Így az áramforrás csatlakoztatásáról Vinon’ telemetriai jelet kapunk: ha a feszültség Vinon’ = 0, akkor a külső táp nincs csatlakoztatva, ha Vinon’ = 5 V, akkor be van kötve. A 10 kOhm-os ellenállás ezt a kimenetet 5 V-ra húzza. A dugó csatlakoztatásakor 0,5 mA áram folyik át az ellenálláson, ami teljesen elfogadható.
Ha egy külső forrás csatlakoztatva van egy alaphelyzetben zárt D2 relén és az FU1 biztosítékon keresztül, az akkumulátorok elkezdenek tölteni. Az alaphelyzetben zárt relé azt jelenti, hogy a kimenetei mindig zárva vannak és csak akkor nyitnak, ha feszültség van a vezérlőérintkezőn. Miért a D2 relé? Tegyük fel, hogy nincs meg ez a relé. Ha a tápegység csatlakoztatva van a platformhoz, de elfelejti bedugni a konnektorba, honnan fogja tudni a mikrokontroller kártya, hogy az akkumulátor töltődik-e vagy sem? Mi a teendő, ha az áramforrás be van dugva a konnektorba, de nem ad ki feszültséget? Vagy minden működik, de a táp csak 10V-ot termel a szükséges 12V helyett? És ha egy ilyen forrást (ami csak 10 V-ot ad) csatlakoztatok egy még nem teljesen lemerült akkumulátorhoz, és 11 V-ot termel, akkor honnan tudhatom, hogy ezt a 11 V-ot az akkumulátorcsomag képezi (ami valójában nem ad ki 10 V-nál nagyobb) vagy külső forrás? Az ilyen helyzetekre kigondoltak egy algoritmust, amelyhez relé kellett. A Vinon telemetriájából tanulunk a külső áramforrás csatlakoztatásáról. Kikapcsoljuk a relét, és megnézzük a Vin’ telemetriát. Ha megfelel Önnek és ez a feszültség az elvárt tartományban van, akkor bekapcsoljuk a relét és jelezzük a töltés folyamatát. Ha nem elégedett, nem kapcsoljuk be a relét és nem jelezzük a meghibásodást. Hagyja, hogy a fedélzeti vezérlőpanel kezelje az elemzési és megjelenítési folyamatot, ne a platformot. Ehhez átvisszük az összes szükséges feszültséget és a Vinoff relé vezérlőjelét. A relémodul vezérlőbemenete 10 kOhm-os ellenálláson keresztül 5 V-ra van húzva, biztosítva a relé folyamatos bekapcsolását. Ha erre a bemenetre 0 V kerül, a relé kikapcsol.
De miért pont egy vízözön előtti mechanikus relé? Végül is telepíthet MOSFET tranzisztort. Volt egy ilyen ötlet, de el kellett hagynom. A modern MOS tranzisztorok nyitott állapotban alacsony ellenállással (tíz milliohm) rendelkeznek, és amikor 2-5 A áram folyik, nem lesz jelentős feszültségesés, és ennek eredményeként felmelegedés - maga a tranzisztor teste képes eloszlatni kis teljesítmény radiátor nélkül is. De mindez arra az áramkörre vonatkozik, amelyben egy ilyen digitális kulcs vezérli az áramforrás és a passzív terhelés csatlakoztatását. A tranzisztort két forrás közé helyezzük, aminek következtében a lefolyó és a forrás közötti feszültségkülönbség jelentős lehet, ami fokozott hőtermeléshez vezet és a tranzisztor nagyon felforrósodik. Ezenkívül a tranzisztor nyitásához vagy zárásához vezérlő áramkört (meghajtót) kell készítenie, mivel a mikrovezérlő kártyáról érkező vezérlőfeszültség szintje 5 V, ami nem elegendő a tranzisztor vezérléséhez szükséges kapuforrás feszültségkülönbség létrehozásához. (Egy tranzisztor, pl. IRFZ44N vezérléséhez 8-12 V feszültséget kell kapcsolnunk a kapujára, hogy kinyithassuk). Akárhogy is - egy kész relémodul, amit csak csatlakoztatni kell, és amely zárt állapotban garantáltan problémamentesen csatlakoztatja a kimenetet a bemenethez.
Így nem csak egy kapcsolótáblát kaptunk, hanem egy teljes értékű tápegységet is. A kártya DC/DC átalakítókat, ellenállásos áramköröket, biztosítékot és egy csomó csatlakozót tartalmaz az elektronika csatlakoztatásához. Szerkezetileg két csatlakozót lehet megkülönböztetni. CON1 csatlakozó, amelyhez az akkumulátorcsomag, a tápkapcsoló/gomb, a tápcsatlakozó, a relémodul, a motorok, a motorvezérlő kártya – a platformon belüli összes periféria csatlakoztatva lesz. És a CON2 csatlakozó, aminek a célja a vezérlőkártya csatlakoztatása. Erre a csatlakozóra 5 V-os telemetriai és vezérlőjeleket adnak ki, valamint hasznos a Vbat akkumulátorcsomag feszültségének „szivattyúzása” is - lehetőséget adunk „magasabb szinten” saját teljesítménycsatornáik megszervezésére különböző feszültségek, például 6 V a szervók tápellátására.
Alváz elektronika
Az elektronika kiválasztása a készülék elektromos áramkörének fejlesztésével párhuzamosan történt.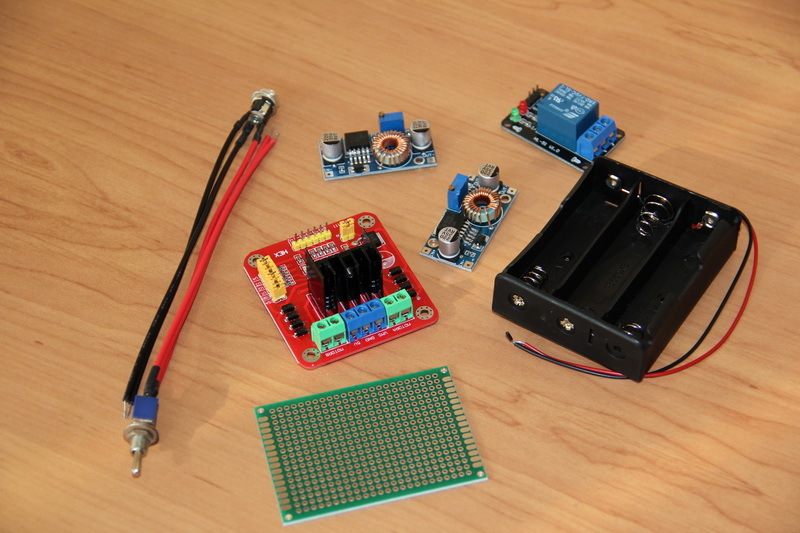
A konnektor és a billenőkapcsoló a kapott alvázkészletből került felhasználásra. Kiválasztottak és megvásároltak egy L298N chipre épülő motorvezérlőt, XL4005 DC/DC átalakító kártyákat, egy névtelen relémodult, egy elemtartót és egy 50x70 mm-es, 2,54 mm-es furatosztású áramköri lapot.
Ezen kívül a következő anyagokra is szükségünk lesz.

A kép tetején több 2,54 mm-es osztású hosszú tűs csatlakozó, valamint aljzatok láthatók, alul a kábel fém érintkezői, balra a hozzájuk tartozó aljzatok, jobbra csavarok, anyák és M2 alátétek. A kártya és a kábel csatlakozóit a különböző üzletekben eltérően hívják. Történelmi okokból az alaplap tűs csatlakozóit PLS-nek, az alaplap aljzatait PBS-nek, a kábel csatlakozóit pedig BLS-nek nevezem. Az interneten, külföldi oldalakon a „2,54 mm-es csatlakozó” vagy a „dupont csatlakozó” típussal keresnek ilyen csatlakozókat. Ezenkívül szüksége lesz különféle fogyóeszközökre - forrasztóanyagra, folyasztószerre, vezetékekre stb., valamint kéziszerszámokra - drótvágókra, csipeszekre, csavarhúzókra stb. - mindez általában azoknak elérhető, akik legalább valamivel foglalkoznak a barkácsolás (Do It Yourself – csináld magad).
Az elektronika és a ház megrendelése előtt arra gondoltam, hogy a kiválasztott elektronikának gond nélkül be kell illeszkednie a belső térbe. Eljött az idő, hogy ezt ellenőrizzük: elrendezzük az elektronikát és kijelöljük a jövőbeli helyszíneket.


Most kezdjük el elkészíteni a táblákat.
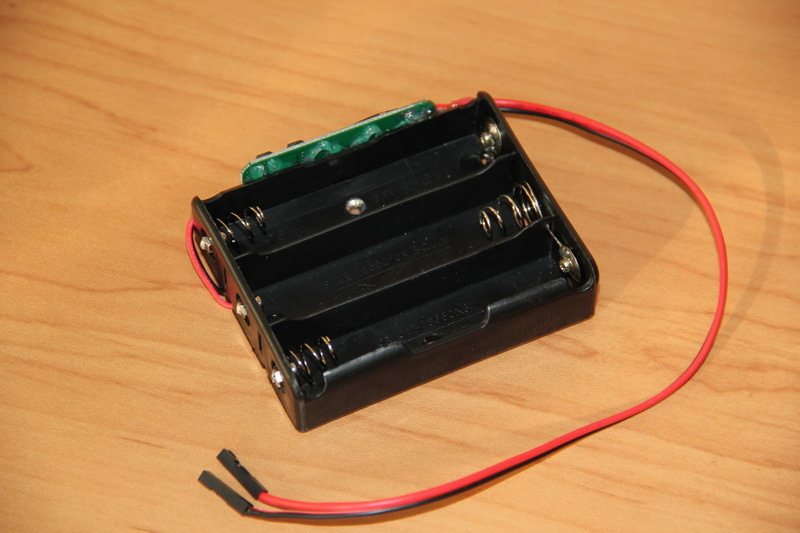
Az akkumulátorral kezdtem. A lítium-ion akkumulátorvezérlőt olvadékragasztóra „rögzítettük”, és a kapcsolási rajznak megfelelően ráforrasztották az érintkezőcsapokat. Úgy gondolom, hogy az olvasókat érdekelni fogja, hogy mi és milyen eszközzel készült, ezért a cikk végén, a spoiler alá rövid megjegyzéseimmel néhány használt berendezésről tettem fel képeket. Az olvadékragasztót olvadékpisztollyal hordtuk fel. Előtte azonban dolgoznom kellett, hogy úgy mondjam, javítsam ennek a rekesznek a megbízhatóságát. Figyelmeztetni fogok mindenkit, aki valamit tervez - jobb, ha nem követem el a hibát, és tartósabb elemtartót vesz. Valamikor a kiskereskedelemben nem találtam ilyen rekeszeket, és amikor megtaláltam, örömből és szív egyszerűségéből gyűjtöttem egy csomót. De velük nem minden olyan egyszerű. Mert ebben a rekeszben a lapos, nem kiálló pozitív betétekkel ellátott elemek egyszerűen nem érik el az érintkezőt. Ráadásul minden rugós érintkező forog, az érintkező rossz. Ezért be kellett csavarni az M2 csavarokat, leharapni a felesleget, felcsavarni az anyákat, és meg kellett húznom, hogy javítsam az érintkezést. De ez nekem nem tűnt elégnek, és az összes csatlakozást is alaposan összeforrasztottam. Mert ha valamit megcsinálnak, akkor annak megbízhatónak kell lennie, hogy a jövőben ne okozzon gondot, és ne térjen vissza rá.
Megjegyzendő, hogy a lítium-ion akkumulátorokhoz hagyományos, kiegyensúlyozás nélküli vezérlőt használnak. Ez azt jelenti, hogy amikor a három akkumulátor közül az egyik fel van töltve, a vezérlő valószínűleg megszakítja az összes akkumulátor töltését. Valójában ez egyszerűen egy védőtábla az akkumulátorok alacsony kisülése és túltöltése ellen, valamint a kisülési áram szabályozása. Ezért ajánlatos azonos tényleges kapacitású akkumulátorokat használni. Ha kiegyensúlyozott vezérlőt használ, akkor a kapacitás kiválasztása kevésbé kritikus, és az akkumulátorok hatékonyabban használhatók, de az ilyen vezérlők drágábbak és több helyet foglalnak. Hogyan válasszunk azonos tényleges kapacitású akkumulátorokat? Ugyanabból a sorozatból, akár márkától is vásárolt azonos akkumulátorokat, a kapacitás 5-10%-kal változhat, és a 6000-8000 mAh-s kínai akkumulátorok általában ismeretlen kapacitású akkumulátorok. A valós kapacitások mérésére a környezetemben igencsak népszerű OPUS BT-C3100 töltőt használtam. Segítségével 12 vásárolt akkumulátort ellenőriztek és hármat választottak ki, amelyek kapacitása minimális volt és nem haladta meg a néhány százalékot. Az LG LGABC21865 akkumulátorok kapacitását 2800 mAh-ra adták, de a valóságban 2400-2500 mAh tartományban ingadozott (700 mA-es áramerősséggel tesztelve).
Rövid kitérő elmélkedés formájában. A töltő kiszámolta nekünk az akkumulátor kapacitását, figyelembe véve a töltésüket 4,2 V-ra és a lemerülésüket, ha nem tévedek az OPUS BT-C3100-nál, 2,8 V-ra. 3, 7 V. Vagyis működő akkumulátorunk kapacitása jóval kisebb a mértnél. Ezt figyelembe kell venni. Talán a jövőben érdemes megfontolni egy négy elemből álló akkumulátorcsomagot. Lehetséges-e egyszerűen kicserélni az akkumulátort és a tápegységet a töltéshez? Találjuk ki. 14,4-16,8 V feszültségtartományt kapunk. A feszültségátalakítók 32 V-ig terjedő bemeneti feszültséggel működnek. Az ellenállásosztók 4,3-5,1 V-os feszültségtartományt adnak a telemetriai jelek számára, ami kissé meghaladja a 0- felső tartományt. 5 K. De ez ellensúlyozható a vezérlőkártya szintjén - ha a telemetriai feszültség 5 V, akkor az akkucsomag egy idő után szinte feltöltődik. Ha viszont a motorok feszültségét 6-7 V-ra csökkentjük, akkor erősebben lemeríthetjük a meglévő akkumulátorcsomagot, és hatékonyabban használhatjuk az akkumulátorokat - ebben az esetben csak egy feszültségátalakítót kell beállítani. Első pillantásra van lehetőség a jövőbeli kutatásokra a hardver változtatása nélkül, és a telemetriai jelek pontos értelmezésének módja a behelyezett akkumulátorcsomag függvényében - ez döntsön a vezérlőpanel szintjén, vagyis egyelőre nem nem kell rá gondolni.
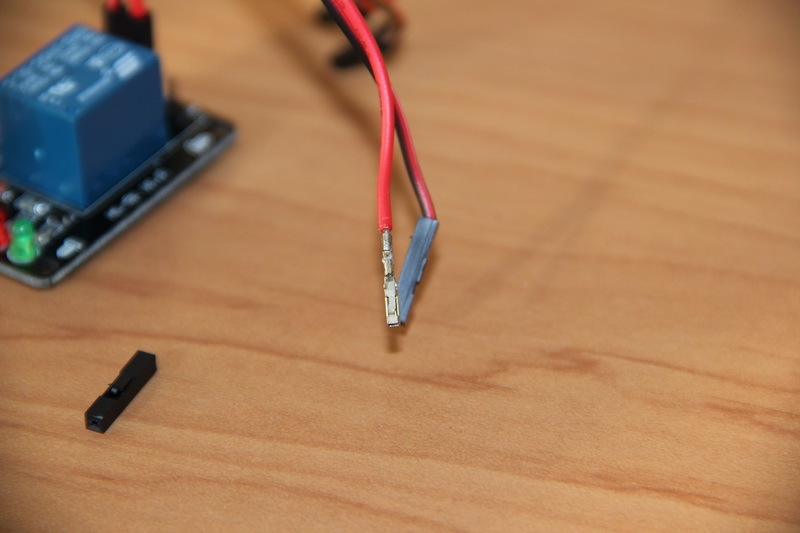
A kimenő vezetékeket a kapott akkumulátorcsomagról speciális fogóval (lehúzó) eltávolítottam, és présfogóval (crimp) fémérintkezőkbe préseltem őket a megbízhatóság érdekében, és műanyag tokot tettem rájuk, így BLS csatlakozókat kaptam. A forrasztásnál forrasztóállomást használtak, forrasztóanyagként a gyanta nélküli POS-61-et, folyasztószerként pedig nem tiszta FluxPlus NC-D500-at használtak.


Az akkumulátorcsomag összeszerelése és az elemek behelyezése után nem ad ki semmit. Így készült sok lítium-ion akkumulátorvezérlő - rövidzárlat, erős kisülés vagy túlzott kisülési áram esetén feszültségmentesíti a terhelést. A védelem „visszaállításához” és az akkumulátorcsomag működési állapotba hozásához 12-12,6 V feszültséget kell kapcsolni a +P/-P érintkezőkre. Ugyanezt kell tenni az akkumulátorok vezérlőhöz való első csatlakoztatása után is. Ezt követően ellenőrizheti, hogy az egység feszültséget termel-e, ha az elemek megfelelően vannak a vezérlőhöz csatlakoztatva.
Az ilyen akkumulátoregységek töltéséhez 12,6 V (3x4,2 V) kimeneti feszültségű tápegységek állnak rendelkezésre. Ilyen táppal az akkumulátorok hatékonyabban használhatók, bár a 12 V-os áramforrások is használhatók, már van ilyen tápom 12,6 V-os és 5 A-es áramerősséggel. Ha ilyen forrást vásárolnak. , akkor érdemes ellenőrizni, hogy megfelel-e a deklarált jellemzőknek. A legegyszerűbb teszt a terhelhetőség ellenőrzése. Ehhez 1 Ohm 10 W és 4,7 Ohm 10 W névleges értékű kerámia ellenállásokat használtam. Miután összeállítottam egy 2,5 ohmos ellenállású szerelvényt ilyen ellenállásokból, csatlakoztattam a tápegységet, és megmértem a feszültséget a kimenetén. 12,6/2,5 = 5 A számított áram mellett 12,6 V-ot produkált a tápom - ez kiváló eredmény. A 12V3A-hez hasonló kínai tápegységek gyakran 10-20%-kal kezdenek „megereszkedni”, mindössze 1 A terhelés mellett.


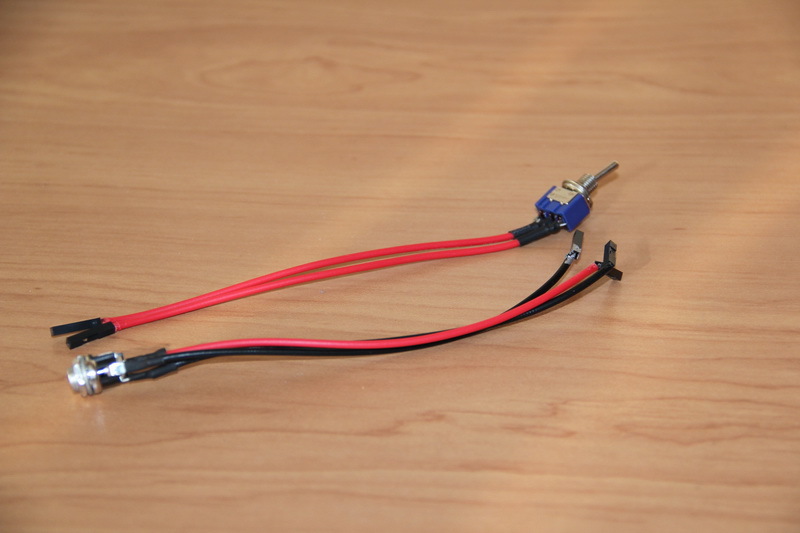
Hasonló módon a kapcsolót és a konnektort előkészítették.
Hajszárító segítségével eltávolították a sorkapcsot a relémodulról, és a PLS érintkezőket forrasztották. Ennek a modulnak a tápegységhez való csatlakoztatásához vezetékeket készítettem - 18-20 AWG keresztmetszetű tápvezetékeket (amelyeken keresztül a tápcsatlakozó és az akkumulátorcsomag csatlakoztatva lesz) lecsupaszítottam, préseltem és forrasztottam. A vezérléshez pedig a nálam lévő, vékonyabb magú vezetékeket használtam, amelyekre könnyen rá lehet keresni „Dupont” néven.

Ugyanez történt a motorvezetővel is.


A „lábakat” forrasztották a DC/DC átalakítókra. Érdemes megemlíteni, hogy ezek az érintkezők olyan fémből készülnek, amely csak aktív folyasztószerrel jól forrasztható. Ezután a FluxPlus helyett LTI-120-at használok, majd a forrasztási területeket egy izopropanollal megnedvesített ruhával törölem le, hogy eltávolítsam a folyasztószer maradványokat.

Most elektronikával készítjük a táblánkat. Kezdetben jó ötlet általánosságban elképzelni, hogyan és mi lesz csatlakoztatva a táblán. Vagyis próbáljon meg rajzolni egy áramköri lapot.
[Tápegység]

Találd ki, hol találtam ki és „nyaltam” ezt a táblát? Két csatlakozót látunk a táblán, két feszültségátalakítót. Megjelent egy további jumper (eltávolítható jumper), amelyet úgy lehet felszerelni, hogy kizárja a biztosítékot az elektromos áramkörből - ezt kifejezetten a biztosíték banális hiánya miatt tettem a tábla gyártása idején.
A tábla bekötése meglehetősen fárasztó és fáradságos munka. Az áramellátáshoz 18-20 AWG keresztmetszetű vezetékeket használtam, más jelekhez - 26-30 AWG. Miért pont a kenyérsütődeszka és a kábelezési gond? Mert még mindig csak az első prototípusunk van. Valami változhat, így a vezetékek újraforrasztása egyszerűbb, mint a vágányok levágása és mindenféle jumperek forrasztása egy kész nyomtatott áramköri lapon. A nyomtatott áramköri lap elkészítése időbe telik - kirakás, maszk készítés, maratás, fúrás, ónozás, kiforrasztás - nem valószínű, hogy ez kevesebb időt vesz igénybe, mint egy „bekötéses” tábla elkészítése. Bár a nyomtatott áramkör megbízhatóbb lesz és profibb lesz.
Ugyanezen okok miatt a DC/DC átalakító modulokat nem forrasztják a táblára, hanem kivehető modulok formájában készítik őket, ideális esetben a kezdeti hibakeresés után, például forró ragasztóval kell rögzíteni őket a csatlakozóhoz. Célszerű ugyanazt a módszert használni az összes csatlakozó csatlakozásának megbízhatóságának növelésére. De amíg van prototípusunk, kényelmesebb, ha mindent kivehetővé teszünk, így a későbbi hibakeresés során szabadon hozzáférhetünk minden fontos alkatrészhez, és szükség esetén könnyebben cserélhetjük.




A tábla gyártása után ellenőrizni kell, hogy mit kaptak az áramköri és kapcsolási rajzoknak való megfelelés érdekében. Multiméterrel ellenőrzöm a be- és kimeneteket rövidzárlatok szempontjából (jobb, ha nem „csörgetjük” az érintkezőket, hanem megmérem az ellenállásukat, mivel például hibás gyártás vagy tervezés esetén száz ohmos ellenállás is előfordulhat formát a bemeneten, ami nem biztos, hogy „csenget”, de jelenléte hiba lesz az áramkörben, és nagy bajt okozhat), és arra is figyelek, hogy minden a kártyán belül a szükséges módon legyen csatlakoztatva.
Az összeszerelés előtti ellenőrzés után meg kell győződnie arról, hogy a kártya megfelelően fog működni, ha minden periféria csatlakoztatva van. Ehhez először csatlakoztatnia kell az akkumulátort, a tápkapcsolót, és meg kell fordítania a kapcsolót. A feszültségátalakítókon lévő LED-eknek világítaniuk kell, és semmi sem éghet ki. Amíg semmi sincs csatlakoztatva, be kell állítani a konverterek kimeneti feszültségét. Ezután a tápfeszültséget kikapcsolják, a relémodult csatlakoztatják, és újra bekapcsolják a tápfeszültséget. Ily módon az összes perifériát lépésről lépésre csatlakoztatják és ellenőrzés alatt tartják.
Platform elektronika telepítése és csatlakoztatása
Az elektronika készen áll. Most telepítenie kell. Emlékszel, az elektronikus táblák ülései meg voltak jelölve? Akkus csavarhúzóval a szükséges helyeken lyukakat fúrnak. Ezután egy csiszolótartozékkal ellátott mini fúróval megcsiszolják őket. A furatokba M2 csavarokat kell becsavarni. Az alátéteket csavarok és anyák alá kell helyezni. Ezenkívül felcsavartam a második anyát - a biztosítóanya megbízhatóbb menetes csatlakozást biztosít, és csökkenti a kicsavarodás valószínűségét. Gépet készítünk.
Megjegyzem, hogy két szomszédos motor közötti távolság elég nagy. Ezt fontos megjegyezni a következő ok miatt. Az a tény, hogy a kiválasztott motorok visszajelzés nélkül vannak. Egyszerűen csak egy bizonyos feszültségszintet kapcsolunk rájuk, és egy bizonyos sebességgel forognak. De a motorok jellemzői eltérhetnek, ami minden bizonnyal problémákhoz vezet az egyenes vonalban történő vezetés során. Ha a motorok elterjedése kicsi, és a robotot csak a kezelő fogja irányítani, aki mindig tudja korrigálni a mozgást, akkor ez nem biztos, hogy jelentős probléma. De ha jelentős a szórás, vagy a robotnak nagy távolságot kell „egyenesben” megtennie automata üzemmódban, akkor visszajelzést kell adni. Létezik egy sor GM25-370-es hajtómű, amelyre a felépítésük megegyezik, amelyekre már Hall-érzékelők vannak felszerelve. Mi az? A motor hátsó oldalán, a hosszúkás tengelyen egy tárcsa van rögzítve, amelyre mágnest helyeznek, ami befolyásolja a Hall érzékelőt. A lemez minden teljes fordulata után impulzusjelet kapunk, melynek feldolgozásával beállíthatjuk a percenkénti fordulatszámot. Így platformunk meglehetősen komoly alapot tartalmaz a jövőre nézve: lehetőség van visszacsatolós motorok beépítésére, tápegységre történő csatlakoztatására, amely táplálja a rajtuk lévő érzékelőket, és telemetriai jeleket továbbíthat a vezérlőkártyára - a vezérlőrendszer automatikusan kiegyenlíteni a motorok fordulatszámát.


A vezetékeket a rajtuk lévő jelöléseknek megfelelően forrasztottam a motorokhoz - mindegyik motoron volt egy piros pont a két érintkező mellett. Miután megkaptam a motorokat, ellenőriztem őket, de nem figyeltem a jelölés helyességére. Az egyik motor egyébként hibásan érkezett, és egyáltalán nem forgott, az eladó kedvesen küldött nekem egy cserét, ami legalább egy hónapig tartott. Ezt követően kiderült, hogy az egyik motor jelölései összekeveredtek, de ez nem probléma - csak változtassa meg a motor tápkártyához való csatlakoztatásának polaritását. Előre tekintve elmondom, hogy ugyanez történt az „oldalak” összekapcsolásával - az „előre” parancs kiadásakor a jobb oldalon a kerekek előre, a bal oldalon hátra forogtak. Ez a kívánt motormeghajtó csatornának a tápegységhez való csatlakoztatásának polaritásának megváltoztatásával is javítható. A csatlakozás polaritásának megváltoztatása - nem kell forrasztani vagy újrakezdeni semmit, csak ki kell cserélni a vezetékeket.
Az elektronikai táblák és a ház közötti elektromos érintkezés megszüntetése érdekében a buborékcsomagolásból műanyag lemezeket vágtam a platform aljára.

Helyezze be az akkumulátorcsomagot. A műanyag nagyon puha és szó szerint megereszkedik a csavarfej alatt, még egy alátét sem tud segíteni, ezért egy hosszú fémlemezt kellett használnom.


Az alsó oldalon lévő összes csavarunk és anyánk kissé csökkentette a hasmagasságot, és meglehetősen esztétikusnak tűnik.


Szigeteljük az alját, ahol az elektronikai táblák fel vannak szerelve. Az akkucsomagban lévő fémlapra is kivágunk és ráhelyezünk egy műanyag csíkot, hogy még az akkutok se karcolódjon meg a csavarfejen, a lítium komoly!


Felszereljük és csavarozzuk az elektronikai táblákat és a tápcsatlakozót.






Rémálom, mennyi vezeték... A perifériákat rákötjük a tápegységre.


Platformvezérlő elektronika
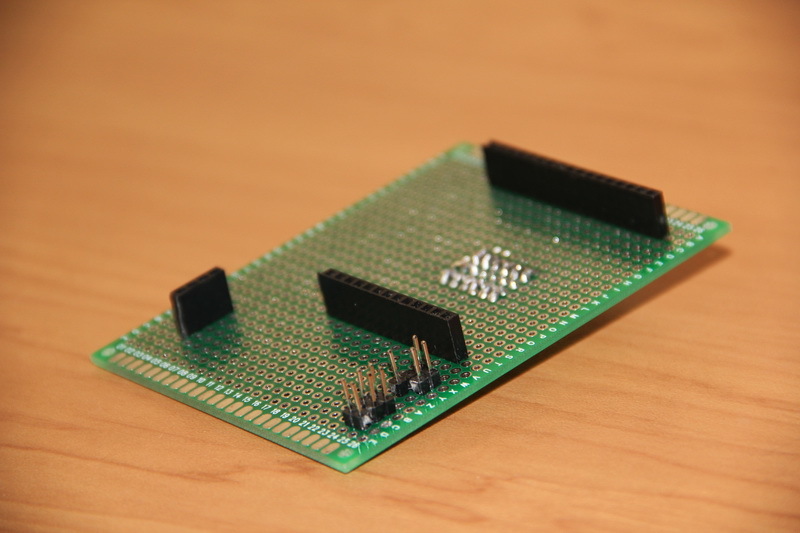
Amint érti, elvileg a feladat befejeződött. A platform megérkezett, minden sikeresen működött. A platform vezérléséhez bármilyen mikrokontroller, FPGA, Arduino kártya, Intel Galileo stb.Az Arduino Nano kártyát választottam, találtam egy olcsó és kényelmes bővítőkártyát a perifériák csatlakoztatásához és egy bluetooth modult hozzá. Az alapötlet az, hogy a platformunkat okostelefonról bluetooth-on keresztül vezéreljük. A bővítőkártya a rengeteg érintkezővel a külső eszközök csatlakoztatásához lehetővé teszi a jövőbeni robotperifériák zökkenőmentes csatlakoztatását a jövőben.


Most meg kell terveznünk és elkészítenünk egy áramköri lapot ezekhez az elektronikákhoz. Készítünk egy „szendvicset”: egy áramköri lapot, amelyre egy bluetooth-modul és egy bővítőkártya van felszerelve, amelybe viszont egy mikrokontrollerrel ellátott kártya van telepítve.

A tápegységhez képest ez a kártya szinte tisztán kapcsolótábla. Középen egy kábel csatlakozik a 18 tűs háromsoros csatlakozóhoz, amely a vezérlőkártyát a tápegységhez köti. Erről a csatlakozóról a jelek a bővítőkártya szükséges érintkezőihez jutnak, amelyek aztán a mikrokontroller szükséges, előre kiválasztott érintkezőihez jutnak. Ezenkívül az 5 V és a Vbat a kártya külön érintkezőire kerül. Az alaplap tápellátása a bluetooth modulhoz tartozik, Rx/Tx bemenetei az Arduino Nano kártya Rx/Tx bemeneteihez csatlakoznak egy bővítőkártyán keresztül. A tábla egy kivehető bipoláris LED-et tartalmaz, melynek célja az áramellátással kapcsolatos összes folyamat jelzése. A LED folyamatosan zöld és piros izzítást generálhat, adott frekvencián villoghat - ennek elegendőnek kell lennie ahhoz, hogy jelezze az akkumulátor normál feszültségét, lemerülését, jelezze a töltési folyamatot és jelezze a csatlakoztatott áramforrás állapotát.
Annak érdekében, hogy ne keveredjen össze, hogy mit hova kell csatlakoztatni, vázlatosan felrajzoltam egy Arduino Nano kártyát, és kiosztottam a jeleket.

Az Rx/Tx portokat egy bluetooth modul foglalja el, amely az UART protokollal működik. Ha lehetséges, az IN1-IN4 jelek digitális portokra csatlakoznak - ezeknek a jeleknek a polaritása határozza meg a motorok forgásirányát, az ENA/ENB pedig azokhoz a portokhoz, amelyek lehetővé teszik a PWM jelek kimenetét - ezek a jelek állítják be a forgási sebességet a motorok közül. A platform telemetriai jeleinek értékeit az Arduino Nano kártya A0-A3 analóg bemenetei digitalizálják. A LED az A4 és A5 portot foglalja el, és jumperekkel csatlakozik. A helyzet az, hogy erre a két portra az I2C protokoll egyszerű szervezéséhez van szükség, és ha szükségünk van rá, egyszerűen eltávolíthatjuk a jumpereket. A LED más szabad portokra „dobható”, vagy a szabad A4 és A5 portokhoz csatlakoztatható egy portbővítő modullal (például PCF8574T chip alapján - további nyolc digitális bemeneti/kimeneti portot biztosít, a modul I2C protokollon keresztül vezérelve), amelynek pár érintkezőire és csatlakoztassa a LED-et. A kapcsolatok ezen elosztásának eredményeként megmarad az SPI-eszközök zökkenőmentes csatlakoztatásának, két további analóg jel digitalizálásának és akár négy PWM-jel kibocsátásának lehetősége (például szervók vezérléséhez). Általában több ingyenes jelet szeretnék, de a számuk növelhető a PCF8574T segítségével. Végül használhat egy másik Arduino Nano-t, vagy helyettesítheti a szükséges feladatokra alkalmasabb platformmal - ez a megoldás teljes mértékben biztosít egy bizonyos minimumot.
Nyomlapunk egyszerű csatlakoztatást is biztosít a tápellátáshoz: vannak érintkezők az 5 V-os tápellátáshoz és az akkumulátorcsomag feszültségéhez (12,6 V-ig).
Érdemes megjegyezni az Arduino Nano-hoz használt bővítőkártya egy árnyalatát. Elvileg a bővítőkártya lehetővé teszi a Vbat futtatását rajta. A bővítőkártyára egy feszültségátalakító van felszerelve, amely 5 V-ra csökkenti a bemeneti feszültséget, és azt táplálja az Arduino Nano kártyára, amelynek konvertere 3,3 V-ra csökkenti, és ezt a feszültséget eltávolítják az Arduino Nano kártyáról és elosztják a bővítőkártya megfelelő érintkezőit. Ezt azonban nem tettem meg, és 5 V-ot csatlakoztattam a bővítőkártya megfelelő érintkezőjére. Ezenkívül a bővítőkártyán lévő vezérlő LED egyáltalán nem világított, ha az Arduino Nano kártya nem volt telepítve, vagyis ez a bővítőkártya Arduino Nano nélkül láthatóan nem működik. Nem vizsgáltam az okokat, de ezt megjegyeztem.
Készítjük ezt a vezérlőtáblát.


Elektronikus táblákat szerelünk rá.



Helyeket készítünk a testületünk számára. Ezzel egyidejűleg beszereljük a kapcsolót is.


És mindent összegyűjtünk.


Most egy kábelt kell készítenie a két tábla csatlakoztatásához. A megbízhatóság érdekében a tápcsatlakozókat is forrasztjuk. Mindent pontosan és nagyon alaposan ellenőrizünk. A 12 V-ról 12 V-ra, 5 V-ra 5 V-ra kell jönni. A táp- és vezérlőáramköri kártyák képei „felülnézetet” mutatnak, vagyis ha megfordítjuk a kártyákat, akkor az alsó, forrasztási oldalon. a táblák, az érintkezők felcserélődnek - ezt figyelembe kell venni a kábel gyártásakor és a megfelelő vezetékek átvezetésekor. A csatlakozókat egyszerűen elkészítettem: először összeállítottam egy sor vezetéket BLS csatlakozókkal, és kétszer becsomagoltam szalaggal. Ezután mind a két/három sort összegyűjtöttük, és ismét szorosan becsomagoltuk szalaggal. Az eredmény egy teljes és monolitikus csatlakozó lett. Az érintkezők nélküli műanyag BLS csatlakozókat egyszerűen a használaton kívüli csatlakozó érintkezőkbe helyezték.
A kábel elkészítése után az összes elektronikus kártyát eltávolítják a vezérlőpanelről, és multiméterrel ellenőrzik, ugyanúgy, mint a tápegységet. Csatlakoztatjuk a vezérlőkártyát a tápegységhez és tápláljuk. Multiméter segítségével gondosan ellenőrizzük az összes modul tápérintkezőit, érdeklődjünk a telemetriai jelek feszültségeiről - még egyszer megbizonyosodunk arról, hogy minden megfelelően van bekötve. Nem kell ezt tennie, magabiztosan szereljen össze mindent, kapcsolja be az áramot, és fedezze fel, hogy bizonyos, persze misztikus módon az 5 V-os és a Vbat vezetékek összekeverednek, és az Arduino kártyánk és a Bluetooth modulunk kiégett. De jobb, ha nem ismételjük meg mások hibáit.
A képen látható, hogy az egyik piros tápvezeték ezüst színű. Ez a Vbat feszültséget továbbító vezető megnevezése. Készülék összeszerelésénél hasznos „kulcsokat” készíteni a csatlakoztatáshoz. Például ne szándékosan forrasztson egy PLS-érintkezőt a csatlakozóra, hanem rontsa el a kábelben lévő csatlakozóaljzatot, vagy tömítse el egy szigetelődarabbal - ebben az esetben a „bolondszigetelés” valósul meg, mivel ilyen kábelt csak akkor lehet beépíteni. pontosan a kártya megfelelő csatlakozójára, egyszerűen azért, mert másképp nem telepíthető (a módszer nem ad 100% -os garanciát - az internet tele van képekkel, ahol a különösen kitartó egyének valahogy megkerülik ezt a védelmet, irigylésre méltó kitartást és figyelemre méltó erejüket használva ). Általában színezem a csatlakozók megfelelő csapjait. Hasznos lenne a DC/DC átalakítók bemeneti csatlakozóit a tápkártyán megjelölni és a kártya megfelelő aljzatait színezni. Ez megakadályozza a konverterek hibás beszerelését, és ha több színt használ, az 5 V-ot és 9 V-ot képező konverterlapok összekeveredését használhatja a fényes női körömlakkot. Ez a kis szabály nagyban segíti a fejlesztés alatt álló eszköz gyakori össze- és szétszerelését a hibakeresés és tesztelés szakaszában.



Csatlakoztatjuk a kábelt a tápegységhez.
Szeretnék röviden visszatérni a cikk elejére, arra a pillanatra, amikor a platformot két részre osztottuk, és „külön” kivettük a vezérlőtáblát. Akkoriban nagyon kiegyensúlyozott döntésnek tűnt. Az Arduino bővítőkártyán található érintkezők bőséges mezőjét tekintve azonban megértjük, hogy ezeknek az érintkezőknek a fele nem használható a platform jelenlegi megvalósításával – az Arduino kártya bemeneti/kimeneti csatlakozóinak majdnem felét elfoglaltuk. És maga a mikrokontroller nem csak egy programot „futtat”, amely egy pár PWM jelet bocsát ki a motorokhoz, hanem teljes irányítást biztosít a teljes platform belső és külső tápellátása felett. Érdemes elgondolkodni - talán érdemes mikrokontrollert beépíteni platformunk motorterébe? A Bluetooth-ot „át kell adni” a „platform feletti” elektronikának, amely vezérli majd a robot eszközeit, és át kell gondolni a vele való csatlakozást. Megszervezhet egy UART protokollt (ez a mikrokontroller két lábát fogja igénybe venni), amelyen keresztül egy adatcsomag kerül továbbításra, amely tartalmazza a motorok forgási irányát és sebességét, valamint a platform általános állapotát... És te alaposan át kell gondolni a kialakítást, hiszen nem sok helyünk van a motortérben... Bár ... Ha kibontja és mozgatja a relét...
Nos, ezzel vége is hosszú és néha unalmas történetemnek. Csak a „hardvert” – a platform hardvert – fejlesztették, gyártották és szerelték össze. A munka következő része a szoftver. De ez nem jelenti azt, hogy a jövőben csak programozóként kell majd dolgoznia. A mikrokontroller firmware-jének létrehozása és hibakeresése során néha elő kell vennie egy multimétert, vagy akár egy oszcilloszkópot, és ki kell találnia, hogy milyen jel érkezik, hol és milyen formában. Általában ennek a szakasznak az elején jelennek meg nagyobb mértékben a „hardver” tervezési szakaszának hibái és figyelmen kívül hagyásai. Készülékünk nagyon egyszerű, így ha valami nem működik, gyorsan megtalálják a hibát. El tudod képzelni, milyen igazán összetett áramkörökkel dolgozni? Ott sokkal óvatosabbnak és óvatosabbnak kell lenni. Szükség lesz egy vezérlőfelület megszervezésére is Bluetooth-on keresztül egy okostelefonnal - valamiféle protokoll kidolgozására a robot és a telefon közötti információs interakcióhoz. És olyan szoftvert kell kifejleszteni, amely kényelmessé és kényelmessé teszi a robot irányítását. De ez egy másik, külön történet.
Néhány használt eszköz és felszerelés
BOSCH ragasztótoll. Ragasztópisztoly. A Bosch terminológiájában ez egy ragasztórúd. Remek mobil megoldás. 18650-es akkumulátorral működik, ami azt jelenti, hogy a jövőben nem lesz probléma a cserével, és nincs más, ami eltörhet. Gyorsan felmelegszik (15 másodperc), és kikapcsolás után használatra kész, szinte azonnal leáll - nem folyik belőle a ragasztó, mint a többi hőpisztolyból. Alkalmazást találtak a mindennapi életben és a kézművességben. Az egyetlen negatívum a nem túl gyakori ragasztópálcikák: 7 mm, magas hőmérséklet 150...170C (a DREMEL GG01 és GG03 pálcikák megfelelőek).

BRUTTÓ 17718. Szigetelés lehúzó szerszám (lehúzó). A jól ismert KBT WS-04A modell teljes analógja, amelyet sok gyártó 1 az 1-ben értékesített.

HT-202A. Szerszám vezetékek préseléséhez csatlakozóérintkezőkkel (crimper).

Solomon SL-30. Megbízható forrasztóállomás. Forrasztópáka tápfeszültség 24V. Nikkelezett csúcs. Pontos hőmérséklet szabályozás.

SAIKE 8858. Más néven Element 8032. Más néven Yihua 8858. Más néven ZHaoxin 858DH. A modellek között vannak eltérések, de a kialakítás, a fűtés és az elektronika ugyanaz. Jó, kényelmes, olcsó és igazán kompakt forrasztópisztoly. Import oldalon vettem, olcsó kínai termékekből utólagos módosításokkal: az esetleges fém(!) törmeléket kirázva, a fluxust lemosva, az érintkezőket felforrasztva a táblán, a power triac a KPT8-ra kerül. Eddig elégedett vagyok, a hajszárító úgy fúj, mint egy hajszárító, a hőmérséklet és a fúvási sebesség állítható. Elvileg a hajszárító megéri a pénzt. Ez egy viszonylag friss vásárlás, és a megbízhatósági statisztikák még nem tisztázottak, de gyanítom, hogy ritka munkára alkalmas lesz.

Metabo BZ 12SP. Nagyon régi csavarhúzó. Ritkaság. Ezek valószínűleg már nem eladók. Meglehetősen kényes munkavégzést tesz lehetővé a jó beállításnak és az orsó kifutásának hiányának köszönhetően.

Velleman VTHD02. Minidrill. Vagy ahogy ők is hívják, egy Dremel (bár ez ugyanolyan helytelen, mint a fénymásolókat fénymásolónak nevezni). Valamikor réges-régen vettem egy készletet promóció céljából, jobban meg voltam elégedve a tartozékkészlettel, mint magával a fúróval. Néhány táplálkozási módosítással azonban egészen jónak bizonyult. Eredeti tápról működik, de terhelés alatt valahogy nehezen megy. Körülbelül két éve persze csak átmenetileg négy darab 18650-es telepnek való rekeszből készült mobil tápegység állítható kimenettel. A minifúró önállóvá vált. Ezzel a táplálkozással a minifúró sokkal jobban érezte magát, és nagyon hasznos eszköznek bizonyult a gazdaságban.


Noble NB4000P-4. Multiméter. Kényelmes, mert a vezetékek teljesen be vannak húzva. Nehéz diákévek alatt szerezte. Vagyis nagyon régen. A vezetékek régen elszakadtak - egy másik meghibásodott multiméterről kellett „működnünk”. Most a vezetékek eltávolítása leállt. Az elemet és a biztosítékot többször cserélték. Még mindig működik - elképesztő megbízhatóság közepes pontossággal.

Fluke 179. Nagy pontosságú multiméter. Kiváló minőségű, kényelmes és ami a legfontosabb, pontos eszköz.

Valamiféle reklámként kaptam. Bár... miért ne – hol vannak akkor a jutalékaim? Mindezek az eszközök általános tájékoztatást szolgálnak. Egy időben például felfedeztem azokat a sztriptíztűzőket, amelyek a vezetékek lehúzását a házimunkából élvezetté varázsolják, és egyáltalán nem bántam meg, hogy vettem egy BOSCH GluePen-t. Talán ez a kis válogatás segít valakinek.
A robot összeállításához egyáltalán nem szükséges sokféle és drága szerszám, bár ez mindenképpen javítja a munka minőségét és nagyobb örömet okoz. Elég egy rendes forrasztópáka, több csavarhúzó és egy fúró. Hiszen valamikor e cikk írója, nagyon régen csak fogó, kalapács, pár csavarhúzó, rézhuzal, merevítő (valahol még ott van!) és két fúró, darabok állt a rendelkezésére. telefonvezetékekből és sok kék elektromos szalagból (korábban gyakran használtak), ez bőven elég volt egy egyszerű autó elkészítéséhez, amely ha megnyom egy gombot, magától egyenesen halad.
Fő összetevők
Számos olvasói kérés miatt linkeket (ebay/aliexpress) biztosítok a főbb komponensekhez. Munkakapcsolatok 2016 szeptemberétől. Hat hónapja (2016. február-március) rendeltem mindent, ezért javaslom, hogy nézzen tovább - talán most kedvezőbb áron vásárolhatja meg.
Alváz, motorok, kerekek, rögzítők - platform (két színben választható) + 4 * (80 mm-es kerék + rögzítőelemek + motor (három sebesség közül választhat)
Ügyeljen a következő készletre - 130 mm-es kerék + kötőelemek + motor Hall érzékelővel
Ügyeljen a nagy kapacitású akkumulátorokra (többször dolgoztam már velük - ezeknek az akkumulátoroknak a valós és a bejelentett kapacitása általában egybeesik, azaz valójában 3400 mAh-s!) - Panasonic NCR18650B 18650 / 3400 mAh / 3,7V / védetlen HC Modul Bluetooth- 06 5
0.9% Szörnyű – hol van a beszédkultúra, a mondatok normális felépítése... a szerzőnek meg kell tanulnia a szintaxist és a morfológiát! 2
5.9% Nehezen tudok válaszolni, vagy a megjegyzésekben elmagyarázom. 12
Megismerkedtünk a 105-Bender ZiChip készülékkel, megtanultuk, hogyan kell dolgozni a Tuner programmal és több egyszerű szkriptet is készítettünk. Ahhoz, hogy továbbléphessünk és megmutassuk, hogyan működik a 105-Bender firmware motorokkal, szükségünk lesz egy kocsira.
A készülék hibakereséséhez a sajátomat használtam, de nektek, blogolvasóknak ez nem túl megfelelő lehetőség. Ezért úgy döntöttek, hogy egy kész kocsit használnak az Arduino projektekhez az eszköz bemutatására.
Az üzlet biztosította számomra a kosarat és a modulokat ehhez a projekthez. DiyLab . Ebben az üzletben sok más érdekes dolgot is vásárolhat.
A kosárkészlet a következő
Amint megérti, a kocsi megjelenése nem számít. Használhat teljesen más dizájnt. Ez lehet négykerék-meghajtású vagy akár lánctalpas kocsi.
A kocsin kívül szükségünk van még:

- Arduino tábla (Uno vagy Nano)
— L298N motorvezető (vagy más típusú)
— fotodetektor és infravörös távirányító (használhat háztartási távirányítót és TSOP4836-ot)
- piezo emitter vagy kis hangszóró
- LED
- kenyérsütőtábla és csatlakozó vezetékek (az egyszerűbb telepítés érdekében)
A kocsi összeszerelése és a modulok egymáshoz csatlakoztatása nem okozhat nehézséget. A modulokat a diagramnak megfelelően kell csatlakoztatni
Használjon kenyérsütőtáblát, hogy egyszerre csatlakoztasson vagy csatlakoztasson mindent vezetékekkel - ahogy én tettem. A modulok elrendezése csak Öntől függ - tegye azt, ami a legkényelmesebb az Ön számára.



Fényszóróként 3 wattos LED-eket használnak eredeti kollimátorral. Két ilyen sorba kapcsolt LED használata esetén nincs szükség hozzájuk illesztőprogramra - 6 voltos tápfeszültség esetén az áram nem haladja meg a névleges értéket. Egy wattos LED-ek is használhatók. A nagy teljesítményű LED-ek kulcsaként térhatású tranzisztort használnak. A hangszórót 10-100 µF-os kondenzátorral kell csatlakoztatni
A kocsi össze van szerelve. A következő cikkben elindítjuk, és megtanítjuk, hogyan engedelmeskedjen a távirányító parancsainak.
(4 275 alkalommal látogatva, ma 1 látogatás)



