![]() A cég által gyártott félvezető alkatrészek köre Texas Instruments A meghajtó IC-ket széles körben bemutatják minden típusú vezérléshez villanymotorok, amelyeket továbbfejlesztve egyre gyakrabban használnak a legkülönfélébb berendezésekben. A cég megoldásokat kínál széles áram- és feszültségtartományban működő hajtások létrehozására, amelyek megbízható és kényelmes működést biztosítanak. gyűjtő,kefe nélküliés léptetőmotorokáram-, feszültség- és hőmérséklet-védelem teljes skálájával.
A cég által gyártott félvezető alkatrészek köre Texas Instruments A meghajtó IC-ket széles körben bemutatják minden típusú vezérléshez villanymotorok, amelyeket továbbfejlesztve egyre gyakrabban használnak a legkülönfélébb berendezésekben. A cég megoldásokat kínál széles áram- és feszültségtartományban működő hajtások létrehozására, amelyek megbízható és kényelmes működést biztosítanak. gyűjtő,kefe nélküliés léptetőmotorokáram-, feszültség- és hőmérséklet-védelem teljes skálájával.
Az elektromos motorok a mai high-tech életmódban a legszélesebb körben alkalmazhatók. Ez a fajta elektromechanikus hajtás még mindig az egyik legelterjedtebb és legkeresettebb. A különféle célú villanymotorok bármely gyártás egyik fő alkotóelemei, széles körben használják az irodai és otthoni berendezésekben, az épületek és létesítmények felügyeleti és vezérlőrendszereiben. Az elektromos motorokat széles körben használják a modern közlekedésben. Még izgalmasabb jövő áll az elektromos járművekben és robotokban használt elektromos motorok előtt.
A technológia fejlődésével a hagyományos motorok javulnak, és egyre több új alkalmazásra találnak. A modern, nagy pontosságú szerszámgépek és a robotika elképzelhetetlen intelligens vezérlőrendszerekkel rendelkező villanymotorok nélkül. A földön, a levegőben és a víz alatt az elektromos motorok továbbra is az elektromos energia mechanikai energiává történő átalakítói.
Elektromos motorok típusai, vezérlési módszerek és felmerülő nehézségek
Először 1834-ben Jacobi orosz tudós alkotta meg az elektromos energiát forgó mozgássá alakító eszközt, amelyet elektromos motornak neveztek. Azóta komoly fejlesztésen esett át - sok új lehetőség jelent meg, de a létrehozásánál használt elektromágnesesség elvei még mindig a modern villanymotorok minden módosításának alapját képezik.
A rajta áthaladó áramvezető (1. ábra) mágneses teret hoz létre maga körül, melynek intenzitása (mágneses indukciója) tekercs (N) alkalmazása esetén arányos a fordulatok számával, és a rajta áthaladó áram (I), ahol, B a mágneses tér vektorindukciója, K a mágneses állandó, N a fordulatok száma, I az áramerősség.

Az áram irányának megváltoztatása befolyásolja a vezető mágneses mezőjének irányát is.
Ebben az esetben egy Lorentz-erő hat egy külső mágneses térbe helyezett áramvezető vezetőre, ami annak forgási mozgását okozza. A forgásirány könnyen meghatározható a mágneses térben lévő áramvezető vezetőre jól ismert jobbkéz-szabály segítségével (2. ábra). A mágneses térben egy vezetőre ható erő (F) egyenlő a vezetőben lévő áramerősség (I) és a tér mágneses indukcióvektorának (B) és a vezető hosszának (L) szorzatával. F=LIB.

Kollektor motorok
Az egyenáramú szálcsiszolt egyenáramú motorok (Brushed DC vagy BDC, a TI terminológiában) napjaink legelterjedtebb elektromágneses forgási mechanizmusai közé tartoznak.
Az állandó mágnesekből összeállított állórész mágneses terében egy több szakaszból álló tekercses forgórész forog, amelyek páronként és váltakozva kapcsolódnak a forgórész tengelyén kommutált kollektorlamellákon keresztül (3. ábra). Az aktivált tekercspár kiválasztása a Lorentz-törvény alapján történik, a Gimlet-szabály szerint. Az áramforrás mindig olyan tekercsekhez csatlakozik, amelyek mágneses erővonalai az állórész mágneses mezőjéhez képest közel 90°-os szögben eltolódnak.

Az ilyen típusú villanymotorok gyakran állandó mágneses állórészt használnak. Lehetővé teszik a forgási sebesség egyszerű beállítását, és nem drágák.
A hasonló típusú 2 tekercses villanymotor egy változatát is széles körben használják, de állandó mágnes helyett állórész tekercseléssel. Az ilyen modellek nagy indítónyomatékkal rendelkeznek, és nem csak egyen, hanem váltakozó árammal is működhetnek. Az ilyen típusú villanymotorokat szinte általánosan használják különféle háztartási készülékekben.
Ennek a BDC kialakításnak a hátrányai közé tartozik a kefe-kollektor szerelvény kopása működés közben. Ezenkívül az egyes rotortekercsek kapcsolása során fellépő szikraképződés miatt megnövekedett elektromágneses interferencia figyelhető meg, ami nem teszi lehetővé az ilyen motorok használatát robbanásveszélyes környezetben.
A BDC motorok jellemzője a forgórész fokozott fűtése is, amelynek hűtése a motor tervezési jellemzői miatt nehéz.
A kollektoros motorok előnyei:
- alacsony költségű;
- egyszerű vezérlőrendszer;
- Nagy nyomatékú, 2 tekercses kommutátoros motorok AC és DC működésre is.
A kollektormotorok működésének jellemzői:
- a kefék rendszeres karbantartást igényelnek, csökkentik a motor megbízhatóságát;
- a kapcsolási folyamat során elektromos szikrák és elektromágneses interferencia lép fel;
- nehéz eltávolítani a hőt a túlmelegedett rotorról.
Kefe nélküli motorok
Az egyenáramú motorok között valamivel kevésbé gyakoriak a kefe nélküli kivitelek (BrushLess DC vagy BLDC), amelyek állandó mágnesekkel ellátott forgórészt használnak, amelyek az állórész elektromágnesei között forognak (4. ábra). Az áram kapcsolása itt elektronikusan történik. Az állórész elektromágneseinek tekercseinek átkapcsolása a forgórész mágneses terejét követi a mezőjének megfelelően.
A forgórész pillanatnyi helyzetét általában jeladók vagy Hall-effektus érzékelő vezérlik, vagy technológiát alkalmaznak a tekercseken a hátsó EMF feszültség mérésére, ebben az esetben külön forgórész helyzetérzékelő (SensorLess) használata nélkül.
Az állórész tekercseinek áramának kapcsolása elektronikus kulcsok (szelepek) segítségével történik. Ez az oka annak, hogy a BLDC kefe nélküli motorokat gyakran "kapcsolt motoroknak" nevezik. A motortekercspár csatlakoztatásának sorrendje a forgórész aktuális helyzetétől függően történik.
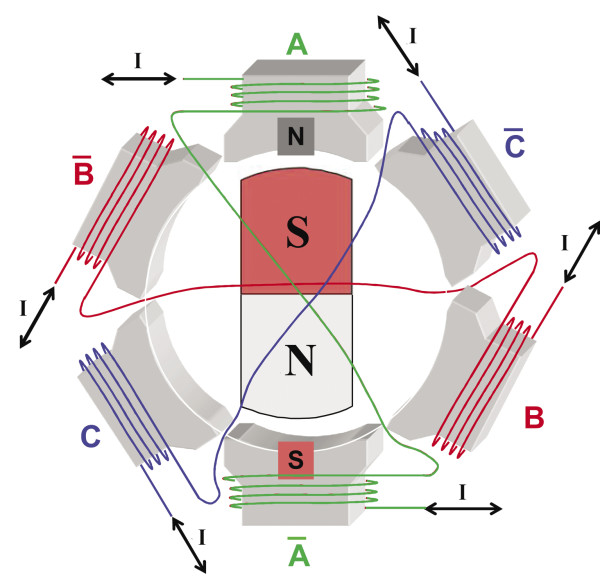
A BLDC működési elve azon alapul, hogy a vezérlő úgy kapcsolja át az állórész tekercseit, hogy az állórész mágneses térvektora mindig 90°-hoz vagy -90°-hoz közeli szögben eltolódik a forgórész mágneses térvektorához képest. A kapcsolás során a forgó mágneses tér hatására az állandó mágnesekkel ellátott forgórész utána mozog.
Háromfázisú vezérlőjel használatakor mindig csak két tekercspár csatlakozik az áramforráshoz, és az egyik le van választva. Ennek eredményeként hat állapot kombinációját alkalmazzuk egymás után (5. ábra).

A forgórész helyzetérzékelő nélküli villanymotorokat a gyártási folyamat fokozott gyárthatósága és alacsonyabb költség jellemzi. Ez a kialakítás leegyszerűsíti a külső csatlakozókapcsok tömítését.
A Hall szenzorok a BLDC-ben fordulatszám- és forgórész helyzetérzékelőként használhatók, amelyekre jellemző az alacsony költség, de a meglehetősen alacsony felbontás is. A megnövelt felbontást forgó transzformátorok (rezolverek) biztosítják. Ezek drágák, és DAC-t igényelnek, mivel a kimenet szinuszos. Az optikai érzékelők nagy felbontásúak, de csökkent a megbízhatóság. A 6. ábra a különböző típusú érzékelők kimeneti jeleit mutatja a motor forgórészének forgása közben.

A BLDC motorok előnyei:
- magas hatásfok;
- kefék hiánya, nagyobb megbízhatóság, csökkentett karbantartási költségek;
- áram/nyomaték linearitás;
- egyszerűsített hőelvezetés.
A BLDC motorok alkalmazási jellemzői:
- bonyolultabb vezérlőrendszer a forgórész helyzetére vonatkozó visszajelzéssel;
- nyomaték hullámzás.
Léptetőmotorok
A léptetőmotorokat (SM) széles körben használják az automatizálási és vezérlőrendszerekben. Ezek egy másik típusú kefe nélküli egyenáramú motor. Szerkezetileg a léptetőmotorok egy állórészből állnak, amelyen a gerjesztő tekercsek találhatók, és egy mágneses anyagokból készült rotorból. A mágneses forgórészes léptetőmotorok nagyobb nyomatékot és a forgórész merev rögzítését teszik lehetővé feszültségmentes tekercsekkel.
A forgási folyamat során az SM rotor lépésenként mozog az állórész tekercseire adott teljesítményimpulzusok vezérlése alatt. A léptetőmotorok kényelmesek a start-stop üzemmódban működő gépek és mechanizmusok hajtásaiban. Mozgási tartományukat az elektromos impulzusok bizonyos sorozata határozza meg. Az ilyen motorok nagyon pontosak, nem igényelnek érzékelőket és visszacsatoló áramköröket. A forgórész forgásszöge az alkalmazott vezérlőimpulzusok számától függ. A pozicionálási pontosság (lépésnagyság) a motor tervezési jellemzőitől, a tekercskötési sémától és a rájuk alkalmazott vezérlőimpulzusok sorrendjétől függ.
A tekercscsatlakozási séma konfigurációjától függően a léptetőmotorokat bipolárisra és unipolárisra osztják. A bipoláris motor mindkét fázisban egyetlen tekercseléssel rendelkezik az állórész mindkét pólusához, amelyet a meghajtónak meg kell fordítania a mágneses tér irányának megváltoztatásához. A bipoláris motornak két tekercselése és ennek megfelelően négy kimenete van. Egy ilyen léptetőmotor vezérléséhez hídmeghajtóra vagy 2 pólusú tápegységgel rendelkező félhíd áramkörre van szükség. A bipoláris vezérlésnél két tekercs működik egyszerre, és a nyomaték körülbelül 40%-kal nagyobb. A 7. ábra a vezérlőjelek sorrendjét mutatja egy bipoláris léptetőmotor forgása közben.

Az egypólusú motor minden fázisban egy középvégű tekercset használ, és egyszerűbb vezérlési sémát tesz lehetővé, egy kulccsal mind a négy féltekercshez.
A négy tekercses léptetőmotorok bipoláris és unipoláris konfigurációkban is használhatók.
Amikor áram folyik át az egyik tekercsen, a forgórész helyzete megváltozik, így a forgórész és az állórész ellentétes pólusai egymáshoz illeszkednek. A forgórész folyamatos forgásához a tekercseket felváltva kapcsolják.
A gyakorlatban különböző módokat alkalmaznak a négy állórész tekercs áramellátására. Leggyakrabban a párosított kapcsolatokat teljes vagy féllépéses működéssel használják. Teljes lépéses üzemmódban a két tekercspár kapcsolható mágneses mezőjében forgó kétpólusú rotor négy pozíciót foglalhat el (8. ábra).

A kettős pozicionálási pontosság és a nyolc pozíció elérése lehetővé teszi a féllépéses működést (9. ábra). Ennek megvalósításához egy köztes lépést adnak hozzá mind a négy tekercs egyidejű táplálásával.

A microstep mód lehetővé teszi a közbenső pozíciók számának és a pozicionálási pontosság jelentős növelését. A mikrolépés gondolata az, hogy a vezérlőimpulzusok helyett folyamatos jelet adnak a léptetőmotor tekercseire, amely alakja egy lépcsős szinuszos alakú (10. ábra). Ebben az esetben egy teljes lépést kis mikrolépésekre osztanak, és a forgás egyenletesebbé válik. A Microstep mód lehetővé teszi a legpontosabb pozicionálás elérését. Ezenkívül ebben az üzemmódban a léptetőmotorok házának rezgése jelentősen csökken.

A léptetőmotorok előnyei:
- alacsony költség a forgási sebesség és a pozicionálás szabályozására szolgáló áramkörök hiánya miatt;
- nagy pozicionálási pontosság;
- széles fordulatszám-tartomány;
- egyszerű vezérlő interfész digitális vezérlőkkel;
- nagyon magas megbízhatóság;
- jó tartási pillanat.
A léptetőmotorok használatának jellemzői:
- Az SD velejárója a rezonancia jelenségének;
- a visszacsatolás hiánya miatt a pozíciókontroll elvesztése lehetséges;
- az energiafogyasztás terhelés nélkül sem csökken;
- nehéz nagyon nagy sebességgel dolgozni;
- alacsony fajlagos teljesítmény;
- meglehetősen összetett szabályozási séma.
Hagyományos motorvezérlési megoldások
A modern precíziós egyenáramú motorvezérlő rendszer tartalmaz egy mikrovezérlőt az adatfeldolgozáshoz és egy teljesítményszabályozó egységet a motor tekercséhez, amelyet gyakran meghajtónak neveznek. A meghajtó egy logikai áramkört tartalmaz a kódolt üzenetek digitális vezérlőjelekké alakítására, amelyekből analóg jelek jönnek létre a Gate Driver blokkban, hogy a térhatású tranzisztorok (FET) alapján vezéreljék a tápkapcsolókat. A FET-ek beépíthetők a meghajtóba, vagy külön blokkban helyezhetők el. Ezenkívül a meghajtó védőáramköröket tartalmaz a teljesítményáramkörökhöz és visszacsatoló áramköröket a motor működésének vezérléséhez.
A 11. ábra az integrált és az elő-illesztőprogramok blokkdiagram-lehetőségeit mutatja. Mindegyik megoldásnak megvannak a maga előnyei és jellemzői. A Pre-Driver jelentősen csökkentett hőmérsékleti rendszerrel rendelkezik, lehetővé teszi a külső tápkapcsolók kiválasztását a csatlakoztatott motor teljesítményének megfelelően. A teljes funkcionalitású integrált meghajtó kompaktabb vezérlőrendszereket tesz lehetővé, minimalizálja a külső csatlakozásokat, de sokkal nehezebbé teszi a hőmérséklet szabályozását.

Tehát az integrált TI meghajtónál a táblán lévő egyes elemek maximális üzemi hőmérséklete elérheti a 193°C-ot, az előzetes meghajtónál ez a szám nem haladja meg a 37°C-ot.

Az egyik leggyakoribb áramkör a motortekercsek kapcsolására a „H” típusú híd. A séma neve a csatlakozási konfigurációhoz kapcsolódik, amely hasonló a „H” betűhöz. Ez az elektronikus áramkör megkönnyíti a terhelésben lévő áram irányának és ennek megfelelően a forgórész forgásirányának megváltoztatását. A hídtranzisztorokon keresztül a tekercsekre adott feszültség állandó és PWM segítségével modulálható. A H-híd elsősorban a motor tápegységének polaritásának megváltoztatására szolgál - fordított (12. ábra), de lehetővé teszi a forgás lassítását is a tekercsvezetékek rövidre zárásával (13. ábra).

A manapság gyakran szigetelt kapuval ellátott térhatású tranzisztorként használt híd teljesítményelemeinek legfontosabb jellemzője a tranzisztor forrása és leeresztője közötti nyitott csatorna ellenállásértéke - RDSON. Az RDSON érték nagymértékben meghatározza a blokk hőteljesítményét és teljesítményveszteségét. A hőmérséklet növekedésével az RDSON is növekszik, és a tekercseken lévő áram és feszültség csökken.
A PWM vezérlőjelek használata csökkenti a nyomaték hullámzását és biztosítja a motor forgórészének egyenletesebb forgását. Ideális esetben a PWM frekvenciának 20 kHz felett kell lennie az akusztikus zaj elkerülése érdekében. De a frekvencia növekedésével a hídtranzisztorok veszteségei nőnek a kapcsolási folyamat során.
A tekercsek formájában jelentkező terhelés induktív tulajdonságai miatt a benne lévő áram alakja nem egyezik az alkalmazott PWM feszültség alakjával. Feszültségimpulzus alkalmazása után az áram fokozatosan növekszik, és szünetekben az áram fokozatosan elhalványul a tekercsekben fellépő vissza-EMF miatt. Az aktuális grafikonon a görbe meredeksége, a hullámosság amplitúdója és frekvenciája befolyásolja a motor teljesítményét (nyomaték hullámzása, zaj, teljesítmény stb.).
Az elektromos motorok tekercseiben a back-emf effektussal gerjesztett áram gyorsított csillapítására diódákat használnak fordított kapcsolásban, a tranzisztorok lefolyó-forrás átmeneteit söntölve, vagy a tekercseket rövidre zárják a drén-forrás átmeneteken keresztül. két tranzisztor egyidejűleg csatlakozik a híd különböző karjaiba. A 13. ábrán a híd három állapota látható: működő, gyors lassulás (Fast Decay) és lassú lassulás (Slow Decay).
A leghatékonyabb pedig a kombinált mód (Mixed Decay), amelyben a munkaimpulzusok közötti szünetben először a tranzisztorok leeresztő forrását tolató diódák működnek, majd bekapcsolnak a híd alsó vállaiban lévő tranzisztorok. .
TI motorvezérlő megoldások
A TI félvezető alkatrészei számos különböző meghajtót tartalmaznak az egyenáramú motorok vezérléséhez. Mindegyikhez minimális külső alkatrész szükséges, kompakt megoldásokat kínálnak a motorvezérléshez 60 V-ig, nagyobb megbízhatóságot, valamint gyors és egyszerű motorhajtási rendszereket.
Az illesztőprogramokba épített intelligens funkciók minimális külső vezérlő mikrokontroller (MCU) támogatást igényelnek, fejlett tekercskapcsolási képességeket biztosítanak, támogatják a külső érzékelőket és a digitális vezérlőhurkokat. A védelmi funkciók komplexuma magában foglalja a tápfeszültség korlátozását, a túláram és rövidzárlat elleni védelmet, az alacsony feszültséget és az üzemi hőmérséklet emelését.
A TI meghajtók teljes választéka három részre oszlik: léptető, kefés és kefe nélküli egyenáramú motorok. A cég honlapján mindegyikben található egy kényelmes kiválasztási rendszer számos paraméterhez. Külön meghajtók vannak, amelyeket különféle típusú motorokhoz terveztek.
TI léptetőmotor meghajtók
A TI motorvezérlési megoldások nagy része tartalmazza a léptetőmotoros meghajtókat (14. ábra), amelyek beépített FET alapú tápkapcsolókkal és előmeghajtóként is elérhetők, amelyek a felhasználó számára a szükséges teljesítménykapcsolók kiválasztását biztosítják. A vállalat modellkínálata összesen több mint 35 meghajtót tartalmaz léptetőmotorokhoz.

A TI a legkorszerűbb mozgásvezérlési és precíz pozicionálási megoldások széles skáláját kínálja mikrolépcsős vezérlőáramkörök segítségével, amelyek egyenletes mozgást biztosítanak a motoroknak a feszültségek és áramok széles tartományában.
A különálló meghajtók, egy vezérlővezérlő segítségével két motor egyidejű vezérlését teszik lehetővé, ehhez négy beépített FET-alapú híd tartozik. Vannak olyan beépített FET-ekkel rendelkező meghajtók, mint például a DRV8834, amelyek csatlakoztathatók egy léptetőmotor két tekercsének meghajtásához, vagy ugyanazokat a tűket használhatják két egyenáramú motor meghajtásához (15. ábra).

A léptetőmotorok meghajtóiban a forgórész simább mozgása érdekében testreszabható mechanizmust használnak az áramimpulzusok simításához (lassú, gyors, kevert csillapítási módok). A mikrolépéses számítási rendszer a következő típusú lehet:
- beépített a meghajtóba;
- külső referenciajel segítségével.
Nem igényel külső vezérlőt a microstepping illesztőprogramokhoz , és . Itt a mozgáslépést és a tekercskapcsolási algoritmust a meghajtóba épített áramkör számítja ki.
TI illesztőprogramok a BDC-hez
A kollektoros egyenáramú motorok vezérlésére egy speciális meghajtócsaládot szánnak, amelynek számos képviselője a 16. ábrán látható. Teljes védelmet nyújtanak túlfeszültség és áram, rövidzárlat és túlmelegedés ellen. Vezérlő interfész képességeikkel ezek a meghajtók egyszerű és hatékony motorkezelést biztosítanak. A felhasználók egy chipet használhatnak egy vagy több 1,8 ... 60 V üzemi feszültségű motor vezérlésére.

A családi illesztőprogramok integrált bekapcsológombbal és kiadás előtti meghajtóként is elérhetők. Minimális kiegészítő komponenst igényelnek, kompakt megoldásokat biztosítanak, csökkentik a fejlesztési időt és lehetővé teszik az új termékek gyorsabb piacra kerülését.
Az alvó üzemmód minimálisra csökkenti az energiafogyasztást alapjáraton, és gyorsabb aktiválást biztosít a motor indításakor. A fordulatszám szabályozásához külső PWM jelek vagy PHASE/ENABLE jelek használhatók a forgásirány kiválasztására és a kimeneti hídkapcsolók bekapcsolására.
Négy kimeneti híddal rendelkező meghajtó két léptetőt vagy egy léptetőt és két BDC-t vagy négy BDC-t tud meghajtani az SPI vezérlő interfész segítségével.
A 17. ábra egy egyszerű meghajtó működési diagramját mutatja egy kollektormotor vezérlésére.

TI illesztőprogramok a BLDC számára
A TI kefe nélküli motormeghajtói vagy BLDC tartalmazhatnak integrált teljesítményhidat, vagy használhatnak külső teljesítménytranzisztorokat. A 3 fázisú vezérlőjelek generálására szolgáló áramkör külső vagy beépített is lehet.
A kefe nélküli villanymotorok vezérlésére szolgáló meghajtók családja különböző vezérlési elvekkel és eltérő nyomatékkal rendelkező modelleket tartalmaz. Ezek a meghajtók ideálisak ipari berendezésekben, autóipari rendszerekben és más alkalmazásokban való használatra, és különböző szintű zajt biztosítanak a BDLC vezetése közben. A motorok megbízható működésének biztosítása érdekében a meghajtók átfogó túláram-, túlfeszültség- és túlmelegedés elleni védelmet biztosítanak. A 18. ábra csak néhányat mutat be a TI kiterjedt és növekvő portfóliójában található háromfázisú BLDC meghajtók közül.

A forgó rotor aktuális helyzetének szabályozására különféle típusú külső érzékelők vagy vezérlőáramkör használható, amely a forgórész helyzetét a hátsó EMF (Back Electromotive Force, BEMF) értékével határozza meg.
A vezérlés PWM-mel, analóg jelekkel vagy szabványos digitális interfészekkel végezhető. A forgásszabályozás testreszabható paraméterei tárolhatók a belső nem felejtő memóriában.
A 19. ábra egy intelligens meghajtót mutat be BLDC-hez, amely széles, 40…125°C hőmérséklet-tartományban működik beépített FET tápkapcsolókkal, mindössze 250 mΩ nyitott csatorna ellenállással. A 8…28 V üzemi feszültségtartomány mellett a meghajtó 2 A névleges áramot és 3 A csúcsáramot tud biztosítani.

A meghajtónak nincs szüksége külső érzékelőre a forgórész helyzetének szabályozásához, de külső ellenállás segítségével szabályozhatja a motor által felvett teljesítményt. alacsony energiafogyasztása készenléti állapotban mindössze 3 mA. És a modellben ez a mutató 180 μA szintre van állítva.
A beépített I2C interfész diagnosztikát és konfigurálást, hozzáférést biztosít a logikai áramkör vezérlőregisztereihez és az EEPROM memóriában tárolt illesztőprogram működési profiljaihoz.
A védelmi funkciók kiterjesztett készlete biztosítja, hogy a motor leálljon túláram és alacsony feszültség esetén. A bemeneti feszültség korlátozott. A túláramvédelem külső ellenállás használata nélkül működik. A védelem használatának módszereit speciális regisztereken keresztül konfigurálják.
Következtetés
Az elektromos motorokat egyre szélesebb körben alkalmazzák a legkülönfélébb berendezésekben, amelyek fejlesztése és új lehetőségek nyílnak meg, főként a modern elektromos hajtásrendszereknek köszönhetően.
A Texas Instruments félvezető portfóliója a meghajtó IC-k széles skáláját tartalmazza minden típusú egyenáramú motor vezérléséhez. Ezek alapján a cég a pontosság, teljesítmény és funkcionalitás követelményei szerint méretezhető megoldásokat kínál az áramok és feszültségek széles tartományában működő hajtások létrehozásához, amelyek megbízható és kényelmes működést biztosítanak a kollektoros, kefe nélküli és léptetőmotorok teljes áramtartományával. , feszültség és hőmérséklet védelem .
Tranzisztoros léptetőmotor meghajtó
Bemutatom figyelmébe a bipoláris léptetőmotor meghajtóját a KT sorozatú bipoláris tranzisztorokon.
A meghajtó az emitter követő elvén működik. A vezérlőjel a kt315 tranzisztoron összeállított erősítő fokozatba kerül. Ezt követően a KT815 és KT 814 komplementer párjáról a H hídra kerül.
Az erősítő fokozatra azért van szükség, mert a mikrokontroller kimenetén lévő áramerősség nem elegendő  nyitó teljesítménytranzisztorok. A teljesítménytranzisztorok után diódák vannak felszerelve a motor önindukciójának csillapítására.
nyitó teljesítménytranzisztorok. A teljesítménytranzisztorok után diódák vannak felszerelve a motor önindukciójának csillapítására.
Az áramkör zajelnyomást is biztosít 3-0,1 mikrofarados és 1-100 mikrofarados kondenzátorok formájában. Mivel az illesztőprogramot 150 wattos CD-meghajtó motorral való működésre tervezték, a tranzisztoros hűtés nem

Léptetőmotor egy tranzisztoros meghajtóhoz csatlakoztatott CD-meghajtóról
telepítve lett, de a KT814 és KT815 tranzisztorok maximális emitterárama 1,5 A, aminek köszönhetően ez a meghajtó még erősebben tudja forgatni a motorokat. Ehhez csak hűtőlemezeket kell felszerelni a teljesítménytranzisztorokra.
Bár a bipoláris léptetőmotorok viszonylag drágák, fizikai méretükhöz képest nagy nyomatékot biztosítanak. Két motortekercshez azonban nyolc vezérlőtranzisztorra van szükség, amelyeket négy H-hídba kell csatlakoztatni. Minden tranzisztornak ellenállnia kell a túlterheléseknek és a rövidzárlatoknak, és gyorsan helyre kell állnia. Ennek megfelelően a meghajtónak összetett védelmi áramkörökre van szüksége nagyszámú passzív komponenssel.

1. kép
1. ábra. Egy lapka egy felületre szerelhető csomagban és több passzív komponens képes meghajtani a bipoláris léptetőmotort.
Bipoláris léptetőmotor vezérlés
DIY léptetőmotor meghajtó— Az 1. ábra egy alternatív motormeghajtó áramkört mutat be, amely a Maxim D osztályú hangerősítőjén alapul. A miniatűr, felületre szerelhető csomagban lévő MAX9715 akár 2,8 W-ot is képes leadni tipikus 4 vagy 8 ohmos terhelés mellett. A mikroáramkör mindkét kimenetét erős MOSFET-ek H-hídjai alkotják, amelyek OUTR +, OUTR- és OUTL +, OUTL- vonalpárokat vezérelnek, amelyek a léptetőmotor A és B tekercséhez vannak csatlakoztatva. Mindegyik pár differenciális impulzusszélesség-modulált jelet generál 1,22 MHz névleges kapcsolási frekvenciával. Az áramkör által generált alacsony zaj miatt nincs szükség kimeneti szűrőkre.
Lecsatoló kondenzátorok
A C1, C3, C4 és C6 kondenzátorok a teljesítmény- és előfeszítő bemenetek leválasztására szolgálnak, míg a C5 és C7 a nagy teljesítményű D osztályú kimeneti erősítők tárolási funkcióit látja el. A C8 és C9 kondenzátorok 16 Hz-re korlátozzák az erősítő sávszélességét, az L2 és a ferritgyöngyök pedig Az L3 csillapítja a hosszú kábeleken indukált elektromos zajt. U-alakú C1, C2, L1 szűrő elnyomja az interferenciát az IC1 chip tápbemenetén. A motor jobb és bal csatornáját vezérlő Step_A és Step_B mikroáramkörök bemeneti jelei bármilyen alkalmas vezérlővel előállíthatók. A belső áramkörök védik az erősítőt a rövidzárlattól és a túlmelegedéstől a léptetőmotor meghibásodása vagy a kimeneteinek nem megfelelő csatlakoztatása esetén.

Asztal 1
Impulzus vonat illusztráció
Az 1. táblázat szemlélteti a Step_A és Step_B impulzusszekvenciát, amelyek egy tipikus léptetőmotor egyirányú forgását szabályozzák a 0-tól 4-ig terjedő jelkombinációk folyamatos alkalmazásával. A 4. lépés visszaállítja a motor tengelyét az eredeti helyzetébe, 360°-os elforgatással. A motor forgásirányának megváltoztatásához kezdje el az impulzusok időzítési diagramjának kialakítását a táblázat aljáról, és sorban haladjon felfelé. A mikroáramkör SHDN bemenetére (8-as érintkező) logikai kisfeszültséget kapcsolva kikapcsolhatja az erősítő mindkét csatornáját. Az áramkör be- és kimenetein lévő hullámformák a 2. ábrán láthatók.
Rövid bevezetés a meghajtók elméletébe és típusaiba, tippek a léptetőmotorok optimális meghajtójának kiválasztásához.
Ha akarodléptetőmotor meghajtó vásárlása , kattintson a jobb oldalon lévő informátorra
Néhány információ, ami segíthet válassza ki a léptetőmotor meghajtót.
A léptetőmotor egy összetett vezérlőáramkörrel rendelkező motor, amely speciális elektronikus eszközt - egy léptetőmotor-meghajtót - igényel. A léptetőmotor-meghajtó STEP / DIR logikai jeleket kap a bemeneten, amelyeket általában az 5 V-os referenciafeszültség magas és alacsony szintje képvisel, és a kapott jeleknek megfelelően megváltoztatja az áramerősséget a motortekercsek, amelyek a tengelyt adott szöggel a megfelelő irányba kényszerítik. >A STEP/DIR jeleket egy CNC vezérlő vagy egy olyan vezérlőprogramot futtató személyi számítógép állítja elő, mint a Mach3 vagy a LinuxCNC.
A meghajtó feladata a tekercsek áramának minél hatékonyabb megváltoztatása, és mivel a tekercsek induktivitása és a hibrid léptetőmotor forgórésze folyamatosan beavatkozik ebbe a folyamatba, a meghajtók jellemzőikben, ill. az így létrejövő mozgás minősége. A tekercsekben folyó áram határozza meg a forgórész mozgását: az áram nagysága határozza meg a nyomatékot, dinamikája befolyásolja az egyenletességet stb.
A léptetőmotorok meghajtóinak típusai (fajtái).
A meghajtókat a tekercsekbe történő áramszivattyúzás módja szerint több típusra osztják:
1) Állandó feszültségű meghajtók
Ezek a meghajtók állandó feszültségszintet kapcsolnak a tekercsekre, az így keletkező áram a tekercs ellenállásától, nagy fordulatszámon pedig az induktivitástól is függ. Ezek az illesztőprogramok rendkívül hatástalanok, és csak nagyon alacsony sebességen használhatók.
2) Kétszintű meghajtók
Ennél a meghajtótípusnál a tekercsben lévő áramerősséget először nagyfeszültség segítségével a kívánt szintre emeljük, majd a nagyfeszültségű forrást kikapcsoljuk, és a kívánt áramerősséget egy kisfeszültségű forrás tartja fenn. Ezek a meghajtók meglehetősen hatékonyak, többek között csökkentik a motor hőjét, és néha még mindig megtalálhatók a csúcskategóriás berendezésekben. Az ilyen illesztőprogramok azonban csak lépéses és féllépéses módot támogatnak.
3) PWM-mel rendelkező illesztőprogramok.
Jelenleg a PWM léptetőmotor meghajtók a legnépszerűbbek, a piacon szinte minden meghajtó ilyen típusú. Ezek a meghajtók nagyon nagy feszültségű PWM jelet adnak a léptetőmotor tekercsére, amely lekapcsol, amikor az áram eléri a kívánt szintet. Az áramerősség, amelynél a lekapcsolás bekövetkezik, potenciométerrel vagy DIP-kapcsolóval állítható be, néha ezt az értéket speciális szoftverrel programozzák. Ezek a meghajtók meglehetősen intelligensek és számos további funkcióval vannak felszerelve, támogatják a különböző lépések felosztását, ami lehetővé teszi a pozicionálás felbontásának és simaságának növelését. A PWM-illesztőprogramok azonban nagyon különböznek egymástól. Az olyan jellemzők mellett, mint a tápfeszültség és a maximális tekercsáram, eltérő PWM-frekvenciával rendelkeznek. Jobb, ha a meghajtó frekvenciája nagyobb, mint 20 kHz, és általában minél magasabb, annál jobb. A 20 kHz alatti frekvencia rontja a motorok működési jellemzőit és a hallható tartományba esik, a léptetőmotorok kellemetlen nyikorgást kezdenek kiadni. A léptetőmotor-meghajtók maguk a motorok után unipolárisra és bipolárisra vannak osztva. A kezdő szerszámgépgyártóknak kifejezetten azt tanácsoljuk, hogy ne kísérletezzenek a hajtásokkal, hanem olyanokat válasszanak, amelyekhez a lehető legtöbb műszaki támogatást, tájékoztatást kaphatják, és amelyekhez a termékek a legszélesebb körben képviseltetik magukat a piacon. Ezek bipoláris hibrid léptetőmotor-meghajtók.
Hogyan válasszunk léptetőmotor-meghajtót (SM)
Első paraméter A léptetőmotor meghajtó kiválasztásakor figyelni kell arra az áramerősségre, amelyet a meghajtó képes biztosítani. Általában meglehetősen széles tartományban szabályozzák, de ha a vezetőnek olyanat kell választania, amely a kiválasztott léptetőmotor fázisáramával megegyező áramot tud leadni. Természetesen kívánatos, hogy a meghajtó maximális áramerőssége további 15-40%-kal több legyen. Ez egyrészt tartalékot ad arra az esetre, ha nagyobb nyomatékot szeretne kapni a motortól, vagy a jövőben erősebb motort szeretne beszerelni, másrészt nem lesz felesleges: a gyártók időnként „beállítják” a névleges értékeket. az elektronikus alkatrészek egyik vagy másik típusú/méretű motorjához, így például egy NEMA 17 (42 mm) motort vezető túl erős 8A-es vezető túlzott vibrációt okozhat.
második pillanat a tápfeszültség. Nagyon fontos és vitatott paraméter. Befolyása meglehetősen sokrétű - a tápfeszültség befolyásolja a dinamikát (nyomatékot nagy fordulatszámon), a rezgéseket, a motor és a vezető fűtését. Általában a meghajtó maximális tápfeszültsége megközelítőleg egyenlő a maximális I áramerősséggel, 8-10-szerese. Ha a meghajtó maximális megadott tápfeszültsége élesen eltér ezektől az értékektől, akkor ezenkívül meg kell kérdezni, hogy mi az oka ennek az eltérésnek. Minél nagyobb a motor induktivitása, annál nagyobb a meghajtó feszültsége. Létezik egy U = 32 * sqrt(L) empirikus képlet, ahol L a léptetőmotor tekercsének induktivitása. Az ezzel a képlettel kapott U érték nagyon közelítő, de lehetővé teszi a navigálást a meghajtó kiválasztásakor: U körülbelül egyenlő a meghajtó tápfeszültségének maximális értékével. Ha U értéke 70, akkor az EM706, AM882, YKC2608M-H illesztőprogramok teljesítik ezt a kritériumot.
Harmadik szempont– Optocsatolt bemenetek elérhetősége. Szinte minden gyárban gyártott meghajtóban és vezérlőben, különösen a márkásakban, kötelező az optocsatoló, mivel a meghajtó egy teljesítményelektronikai eszköz, és a kulcs meghibásodása erőteljes impulzushoz vezethet a vezérlőjeleket továbbító kábeleken, és éghet. ki egy drága CNC vezérlőt. Ha azonban úgy dönt, hogy egy ismeretlen modell léptetőmotor-meghajtóját választja, kérdezze meg a bemenetek és kimenetek optoizolációjának meglétét.
Negyedik szempont– rezonanciaelnyomó mechanizmusok elérhetősége. A léptetőmotor rezonancia mindig előforduló jelenség, a különbség csak a rezonancia frekvenciában van, ami elsősorban a terhelés tehetetlenségi nyomatékától, a meghajtó tápfeszültségétől és a motorfázis beállított áramától függ. Amikor rezonancia lép fel, a léptetőmotor vibrálni kezd, és elveszíti a nyomatékát, amíg a tengely teljesen le nem áll. A rezonancia elnyomására mikrolépéses és beépített rezonanciakompenzációs algoritmusokat használnak. A rezonanciában oszcilláló léptetőmotor forgórésze az indukciós EMF mikrooszcillációit generálja a tekercsekben, amelyek jellege és amplitúdója alapján a meghajtó határozza meg, hogy van-e rezonancia, és milyen erős. A kapott adatoktól függően a sofőr időben kissé eltolja a motorfokozatokat egymáshoz képest - egy ilyen mesterséges egyenetlenség kiegyenlíti a rezonanciát. A rezonancia elnyomás minden Leadshine DM, AM és EM sorozatú meghajtóba be van építve. A rezonancia-elnyomó illesztőprogramok kiváló minőségű meghajtók, és ha a költségvetése megengedi, használja őket. Azonban még e mechanizmus nélkül is a sofőr teljesen működőképes eszköz marad – az eladott illesztőprogramok nagy része rezonanciakompenzáció nélkül kapható, mégis gépek tízezrei működnek gond nélkül szerte a világon, és sikeresen látják el feladataikat.
Ötödik szempont- protokoll rész. Győződjön meg arról, hogy az illesztőprogram a szükséges protokoll szerint működik, és a bemeneti jelszintek kompatibilisek a szükséges logikai szintekkel. Ez az ellenőrzés az ötödik pont, mert ritka kivételektől eltekintve a meghajtók túlnyomó többsége a STEP / DIR / ENABLE protokoll szerint működik és kompatibilis a 0..5 V jelszinttel, csak minden esetre meg kell győződni róla .
Hatodik szempont- védelmi funkciók jelenléte. Ezek közül a tápfeszültség túllépése, a tekercsáram (beleértve a rövidzárlati tekercseket is), a tápfeszültség polaritásváltása és a léptetőmotor fázisainak hibás bekötése elleni védelem. Minél több ilyen funkció, annál jobb.
Hetedik szempont– mikrolépéses módok jelenléte. Most már szinte minden vezetőnek sok mikrolépési módja van. Azonban minden szabály alól vannak kivételek, és csak egy mód van a Geckodrive meghajtókban - 1/10 lépéses felosztás. Ezt az indokolja, hogy a nagyobb osztás nem hoz nagyobb pontosságot, vagyis nincs is rá szükség. A gyakorlat azonban azt mutatja, hogy a mikrolépés egyáltalán nem a pozicionálás diszkrétségének vagy pontosságának növelésével hasznos, hanem attól, hogy minél nagyobb a lépésosztás, annál egyenletesebb a motortengely mozgása és annál kisebb a rezonancia. Ennek megfelelően, ceteris paribus, érdemes az osztást használni, minél több, annál jobb. A maximálisan megengedett lépésosztást nem csak a meghajtóba épített Bradis táblák határozzák meg, hanem a bemeneti jelek maximális frekvenciája is - például egy 100 kHz-es bemeneti frekvenciájú meghajtónál nincs értelme használni 1/256-os osztás, mivel a forgási sebesség 100 000 / (200 * 256) * 60 = 117 ford./perc értékre korlátozódik, ami egy léptetőmotornál nagyon alacsony. Ráadásul egy személyi számítógép is alig tud 100 kHz-nél nagyobb frekvenciájú jeleket generálni. Ha nem tervez hardveres CNC-vezérlőt, akkor valószínűleg 100 kHz lesz a mennyezet, ami 1/32-nek felel meg.
Nyolcadik szempont- További funkciók elérhetősége. Sok közülük lehet, például az „elakadás” meghatározásának funkciója - a tengely hirtelen leállása elakadáskor vagy nyomatékhiány a léptetőmotorban, kimenetek külső hibajelzéshez stb. Mindegyik nem szükséges, de nagyban megkönnyíthetik az életet a gép építésénél.
A kilencedik és legfontosabb szempont- a sofőr minősége. Nem sok köze van a tulajdonságokhoz stb. Rengeteg ajánlat van a piacon, és néha szinte vesszőig egybeesik a két gyártó meghajtóinak jellemzői, melyeket felváltva a gépre telepítve egyértelművé válik, hogy az egyik gyártó egyértelműen nem végzi a dolgát, és az olcsó vasak gyártásában szerencsésebb lesz. Egy kezdő számára meglehetősen nehéz előre meghatározni a vezetői szintet néhány közvetett adat felhasználásával. Megpróbálhat az intelligens funkciók számára összpontosítani, mint például a „leállás észlelése” vagy a rezonancia elnyomása, valamint használhatja a bevált módszert - a márkák megcélzását.
A léptetőmotorok azért érdekesek, mert lehetővé teszik a tengely egy bizonyos szögben történő elforgatását. Ennek megfelelően segítségükkel a tengelyt bizonyos fordulatszámmal elforgathatja, mivel az N fordulat egy bizonyos szög, amely 360 * N, beleértve a nem egész fordulatszámot, például 0,75 fordulat, 2,5 fordulat, 3,7 forgalom stb. A léptetőmotorok ezen képességei határozzák meg alkalmazásuk körét. Főleg különféle eszközök pozicionálására szolgálnak: olvasófejek lemezmeghajtókban, nyomtatófejek nyomtatókban és plotterekben stb.
Természetesen a rádióamatőrök nem hagyhatták figyelmen kívül ezeket a lehetőségeket. Sikeresen használják a léptetőket házi robotok, házi készítésű CNC gépek stb. A léptetőmotorral végzett kísérleteim eredményeit az alábbiakban ismertetem, remélem valakinek hasznos lehet.
Tehát mire van szükségünk a kísérletekhez. Először is a léptetőmotor. Vettem egy 5 voltos kínai bipoláris léptetőt, rejtélyes névvel, egy régi 3,5"-os meghajtóról leszakítva, hasonló az M20SP-GW15-höz. Másodszor, mivel a motortekercsek jelentős áramot fogyasztanak (jelen esetben akár 300 mA-t is), ezért teljesen érthető, hogy a léptetőt nem lehet közvetlenül a vezérlőhöz csatlakoztatni, meghajtóra van szükség.
A bipoláris léptetőmotorok meghajtójaként általában úgynevezett H-híd áramkört vagy speciális mikroáramkört használnak (amelyben még H-híd van beépítve). Természetesen saját maga is faraghatja, de én ugyanabból a régi meghajtóból vettem egy kész mikruhát (LB1838). Valójában a fentieken kívül a kísérleteinkhez még szükségünk lesz: egy PIC vezérlőre (a PIC12F629 volt a legolcsóbb) és néhány gomb.
Mielőtt közvetlenül az áramkörre térnénk, foglalkozzunk egy kicsit az elmélettel.
A bipoláris léptetőmotornak két tekercselése van, és ennek megfelelően négy vezetéken keresztül csatlakozik. A tekercsek végeit egy egyszerű hívással megtalálhatja - az azonos tekercshez tartozó vezetékek végei csengenek egymás között, de a különböző tekercsekhez tartozó végek nem. Az első tekercs végeit „a”, „b”, a második tekercs végeit „c”, „d” betűk jelölik.
A szóban forgó példányon a motor közelében található érintkezők digitális jelölése és a vezetékek színjelölése (Isten tudja, talán ez is valami szabvány): 1 - piros, 2 - kék - első tekercselés; 3 - sárga, 4 - fehér - a második tekercs.
Ahhoz, hogy a bipoláris léptetőmotor forogjon, a tekercseket a táblázatban látható sorrendben kell feszültség alá helyezni. Ha a táblázat bejárásának irányát körben felülről lefelé választjuk, akkor a motor előre, ha lentről felfelé körben, hátrafelé forog:
Egy teljes ciklus alatt a motor négy lépést tesz meg.
A helyes működés érdekében szigorúan be kell tartani a táblázatban feltüntetett kapcsolási sorrendet. Azaz például a második kombináció után (amikor a +-t a "c" kimenetre, a mínuszt a "d" kimenetre alkalmaztuk), alkalmazhatjuk akár a harmadik kombinációt (kapcsoljuk ki a második tekercset, és az elsőnél alkalmazzuk a "a" és + a "b" értékre), akkor a motor egy lépéssel előre fordul, vagy az első kombináció (a motor egy lépést hátrafelé).
A kombinációt, amellyel a forgást el kell indítani, a motor leállítása előtti utolsó kombinációja határozza meg (kivéve persze, ha ezután kézzel forgatták), és a kívánt forgásirány.
Vagyis tegyük fel, hogy a motort 5 lépéssel előre forgattuk a 2-3-4-1-2 kombinációkat alkalmazva, majd feszültségmentesítettük, majd még egy lépést előre akartunk tekerni. Ehhez a tekercsekre a 3-as kombinációt kell feltenni Tegyük fel, hogy ezután újra feszültségmentesítettük, majd egy idő után 2 lépést vissza akartuk vinni, akkor a 2-1 kombinációt kell a motorra rátenni. És így tovább ugyanabban a szellemben.
Ez a táblázat többek között lehetővé teszi annak becslését, hogy mi lesz a léptetőmotorral, ha összekeverjük a tekercsek vagy a tekercsekben lévő végek bekötési sorrendjét.
Itt fejezzük be a motort, és továbblépünk az LB1838 meghajtóra.
Ennek a mikruhának négy vezérlőszára van (IN1, IN2, EN1, EN2), amelyekre a vezérlőtől fogunk jeleket küldeni, valamint négy kimeneti láb (Out1, Out2, Out3, Out4), amelyekre a motortekercsek csatlakoznak. A tekercsek csatlakoztatása a következőképpen történik: az "a" vezeték az Out1-hez, a "b" vezeték az Out2-hez, a "c" vezeték az Out3-hoz, a "d" vezeték az Out4-hez.
Az alábbiakban az illesztőprogram chipjének igazságtáblázata látható (a kimenetek állapota a bemenetek állapotától függően):
| IN1 | EN1 | Out1(a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Alacsony | magas | + | — | Alacsony | magas | + | — |
| magas | magas | — | + | magas | magas | — | + |
| x | Alacsony | ki | ki | x | Alacsony | ki | ki |
Most rajzoljuk meg a diagramra, hogy az IN1, EN1, IN2, EN2 jeleknek milyen formájúak legyenek egy teljes forgási ciklus (4 lépés), azaz. úgy, hogy a tekercskötés mind a 4 kombinációja sorosan jelenjen meg a kimeneteken:

Ha alaposan megnézzük ezt a diagramot (a bal oldalon), akkor nyilvánvalóvá válik, hogy az IN1 és IN2 jelek pontosan azonosakká alakíthatók, vagyis mindkét lábra ugyanaz a jel alkalmazható. Ebben az esetben a diagramunk így fog kinézni:

Tehát az utolsó diagram azt mutatja, hogy milyen jelszint-kombinációknak kell lenniük a meghajtó vezérlőbemenetein (EN1, EN2, IN1, IN2), hogy megkapjuk a megfelelő motortekercselési kombinációkat, és a nyilak jelzik a sorrendet, ezeket a kombinációkat meg kell változtatni, hogy biztosítsák a kívánt oldal elforgatását.
Ez alapvetően az egész elmélet. A szükséges szintkombinációkat a vezérlő bemeneteken a vezérlő alakítja ki (PIC12F629-et fogunk használni).
Rendszer:
Kész készülék:


A vezérlőprogram a következő algoritmust valósítja meg: a KN1 gomb megnyomásakor a motor egy lépést az egyik irányba, a KN2 gomb megnyomásakor pedig egy lépést a másik irányba.
Ami azt illeti, itt becsavarható, és a számítógépről való vezérlés (átviteli sebesség, lépések száma és forgásirány a számítógépről) valósítható meg.



