A célpont vízszintes síkban történő manőverezése az irány és a repülési sebesség megváltoztatásával jár. A „Manőver” módszerrel végzett vadászirányítás első és második szakaszában egy légi célmanőver befolyása különböző módon nyilvánul meg.
Tegyük fel, hogy az irányítást az első szakaszban hajtják végre, amikor a légi célpont és a vadászgép a pontokon volt. BAN BEN És A (7.9. ábra), találkozásuk pedig a ponton lehetséges volt S kb .
Rizs. 7.9. A célmanőver hatása vízszintes síkban
egy vadászgép repülési útvonalán
Ha a légi célpont a ponton van BAN BEN manőverezte a pályát és az időt t sarokba fordult w t , akkor ahhoz, hogy a vadász a második vezetési szakasz fordulási ívének érintőjét kövesse, annak irányának egyidejűleg egy szöget kell változnia w és t . Miután a légi célpont befejezte a manővert, lehetségessé válik a találkozás a ponton VAL VEL , és a légi célpont ponthoz vezető útjának hossza a következőre változik DSc.
Ha azt képzeljük, hogy a kanyar kezdőpontja együtt mozog a TC-vel, amely ahhoz képest ugyanolyan távolságra és távolságra helyezkedik el, mint a harcos a forduló kezdetének pillanatában, akkor a harcost a „Párhuzamos megközelítés” segítségével ebbe a pontba irányítják. ” módszerrel. Ha a CC nagy távolságra van Előtt egy harcosból, amihez képest az intervallum én és megelőző fordulási távolság Dupr elhanyagolható, akkor általában a „Manőver” módszer tulajdonságai közel állnak a „Párhuzamos megközelítés” módszer tulajdonságaihoz.
Egy későbbi harcos találkozáshoz egy célponttal (DSc > 0) arra készteti, hogy elforduljon a harcostól (DΘ és > 0) , és a harcos felé fordulva egy korábbi találkozáshoz vezet. Ezért a célpont iránymanőverének ellensúlyozására szolgáló intézkedés, akárcsak a „párhuzamos megközelítés” módszerrel történő irányítás esetén, a vadászcsoportok egyidejű célba vétele lehet különböző irányokból.
A TC-től való távolság csökkenésével egyre nyilvánvalóbbá válik a különbség a „Manőver” módszer és a „Párhuzamos megközelítés” módszer tulajdonságai között. A CV elfordítása során a vadászgépnek egyre nagyobb szögekben kell elfordulnia, vagyis megnő a w szögsebessége.
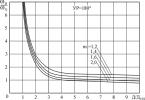
Értékváltozás w és amikor egy vadászgép ütközési pályán repül egy légi célponttal (UR = 180°) a szögsebességek kapcsolatának grafikonját jellemzi w és / w c a hatótávolságból, az ólomfordulási távolság töredékében kifejezve D/Dupr.
Amint az a grafikonon látható, nagy tartományokban (D/Dupr = 5÷ 10) hozzáállás w és / w c kissé eltér az egységtől, vagyis a vadászgép szögsebessége kis mértékben eltér a manőverező célpont szögsebességétől. A tartomány csökkenésével körülbelül háromra Szuper , a wi értéke intenzíven növekszik, és amikor a harcos megközelíti a forduló kiindulópontját (D/Dupr = 1)w és a végtelenségig növekszik.
Így amikor a „Manőver” módszerrel egy manőverező CC-re célozunk, szinte lehetetlen eljuttatni a vadászgépet arra a pontra, ahol a kanyar a számított sugárral kezdődik.

Rizs. 7.10. A szögsebességek arányának függősége w és / w c amikor manőverezi a célt
kapcsolatban az útmutatás első szakaszában D/Dupr
A vezetési folyamat során az első szakaszban a légi célpont többször is manőverezhet. Tehát például egy légi célpont egy ponton AZ 1-BEN bekapcsolhatja a vadászgépet, ami pontot eredményez A1 le kell fordítani az előző irányáról, és meg kell változtatni a korábban tervezett fordulás irányát. Ennek eredményeként a vadászgép pályája a vezetés első szakaszában egy egyenes vonalból összetett vonallá változik, amely változó sugarú kanyarodó ívekből és közöttük lévő egyenes szakaszokból áll. Mindez megnehezíti a repülés végrehajtását a légi csatába.
Megvizsgáljuk a légi célpont manőverének hatását a vadászgép irányításának második szakaszában a „Manőver” módszerrel a 7.11. ábra szerint:

Rizs. 7.11. Egy légi célpont manőverének hatása vízszintes síkban
a „Manőver” módszerrel történő irányítás második szakaszában a vadászgép repülési útvonalára
Tegyük fel, hogy a vezetés második szakaszának valamely pillanatában a vadászgép és a légi célpont a pontokon van. A És BAN BEN és a cél eléréséhez a ponton Co vadászgép egy sugárral kanyarodik Ro és a szögsebesség w és = Vi/ Ro .
Ha egy ideig Dt a légi cél egy szögben megváltoztatja repülési irányát w c × Dt , akkor a vele való találkozás a ponton lehetségessé válik VAL VEL . Egy pontból eljutni erre a pontra A a vadásznak más sugárral kell kanyarodnia R . De előre Dt ráadásul sarkon kell fordulnia w és D × Dt .
Így a légi célpont manővere a vezetés második szakaszában a vadászgép további fordulási szögsebességének kialakulásához vezet. w és D . Minél kisebb a hátralévő elfordulási szög UR harcos, annál nagyobb az érték w és D , és ahogy a harcos közeledik a forduló végpontjához w és D a végtelenségig növekszik.
Így szinte lehetetlen a vadászgépet egy manőverező légi célponthoz képest adott helyzetbe hozni az irányítás második szakaszában a „Manőver” módszerrel.
Ebben a tekintetben egy légi cél manőverezése esetén a második szakaszban általában átváltanak a vadászgép irányítására a „Pursuit” módszerrel.
A nyomon követett cél manővere, amely időtartamát tekintve meghaladja a VDU bemenetén az információ frissítési periódusát, a dinamikus szűrési hibák szisztematikus összetevőjének megjelenésében nyilvánul meg.
Tekintsük példaként egy olyan célpálya felépítésének folyamatát, amely elér egy pontot B(12.15. ábra) egyenletesen és egyenesen mozogtak, majd nagy (1), közepes (2) vagy kis (3) túlterheléssel (szaggatott-szaggatott vonalak) megkezdték a manővert. A pálya egyenes szakaszának paramétereinek értékelése alapján n mérési eredmények (az ábrán körrel jelölve), a cél aktuális koordinátái (szaggatott vonal) és extrapolált koordináták a ( n+1. felülvizsgálat (háromszög).
| A |
| B |
Amint az ábrán látható, a manőver megkezdése után a fogyasztóknak kiadott célpont aktuális koordinátái dinamikus hibát tartalmaznak, melynek mértéke annál nagyobb, minél nagyobb a célpont túlterhelése a manőver során, ill. a tér megtekintésének időszaka.
A cél ilyen körülmények között történő automatikus nyomon követéséhez először is észlelni (azonosítani) kell egy manővert, másodsorban pedig az egyenes vonalú és egyenletes célmozgás hipotézisének feladásával meg kell határozni a manőver paramétereit, és ennek alapján a célmozgás új hipotézise.
Számos ismert módszer létezik a manőver észlelésére a célkoordináták diszkrét méréseinek eredményei alapján:
1. Az egyenes vonalú egyenletes mozgás hipotézise szerinti szűrés leállításának oka egy bizonyos állandó értékű maradék modulus túllépése lehet. Ebben az esetben a vétel utáni szűrés folytatásához szükséges feltétel n A védjegy a következő formában jeleníthető meg:
 ;
;  (1)
(1)
ahol: Δ P, Δ D- állandók, amelyek meghatározzák az eltérés megengedett értékét, és függenek a radar felülvizsgálati időszakától és a cél túlterhelésének elfogadott értékétől a manőver során;
P n, D n- az n-edik felmérésben mért irány- és tartományértékek;
, - az n-edik mérés időpontjában extrapolált irány- és tartományértékek.
2. A vízszintes síkban végzett manőverérzékelés minőségére vonatkozó magasabb követelményekkel téglalap alakú koordináta-rendszerben a pályák követésének körülményei között az eltérés megengedett értékét minden felülvizsgálatkor meghatározzák, és a problémát az alábbiak szerint oldják meg:
a) minden koordináta mérés eredménye alapján kiszámítjuk az extrapolált és mért koordináta értékek maradék moduljait
 ;
; 
 ;
;
b) kiszámítjuk a diszkrét mérési hibák szórását
ahol σ D, σ P- a tartomány és az irányszög diszkrét mérésének négyzetes középhibái;
c) kiszámítjuk az extrapolációs hibák szórását
 ,
,

d) kiszámítjuk a koordinátamérés és az extrapoláció teljes hibájának szórását
| (5) |
e) az értékeket összehasonlítjuk dÉs  , ahol a manőver téves észlelésének elfogadható valószínűsége érdekében választott együttható.
, ahol a manőver téves észlelésének elfogadható valószínűsége érdekében választott együttható.
Ha összehasonlításból kiderül, hogy d>  , akkor megszületik a „manőverre váró” döntés. Ha az egyenlőtlenség másodszor is teljesül, akkor megszületik a „manőver” döntés, és leáll a pályaparaméterek szűrése az alkalmazott hipotézis szerint.
, akkor megszületik a „manőverre váró” döntés. Ha az egyenlőtlenség másodszor is teljesül, akkor megszületik a „manőver” döntés, és leáll a pályaparaméterek szűrése az alkalmazott hipotézis szerint.
3. A manőverészlelési kritérium kiválasztásának egy másik megközelítése is használatos. Minden felmérésben kiszámításra kerül a polárkoordináta-maradékok autokorrelációs függvénye az előző és a jelenlegi felmérésekben
 ,
,

Ha nincs manőver, akkor Δ D nés Δ P náttekintésről áttekintésre független, és a reziduumok autokorrelációs függvényei kicsik vagy akár nullák is. A manőver jelenléte jelentősen megnöveli a maradékok szorzatának matematikai elvárását. A manőver megkezdésére vonatkozó döntés akkor születik, amikor az autokorrelációs függvények egy bizonyos küszöbértéket meghaladnak.
MÁSODIK TANULMÁNYI KÉRDÉS: Célkövetés manőver közben.
A legegyszerűbb esetben, amikor egy manőver kezdetét a cél (n+1)-edik besugárzása után észlelik két ponton - a becsült koordináták az n-edik felmérésben (nyitott kör), a mért koordináták pedig a ( n A +1)-edik felmérés (folytonos kör) kiszámítja a célpont sebességvektorát, amely felhasználható az aktuális koordináták és az extrapolált koordináták kiszámítására a ( n+2. felülvizsgálat. Ezt követően a jelenlegi és a korábbi felmérésekben mért célkoordinátákat használjuk fel a célpálya megszerkesztésére és az extrapolált koordináták kiszámítására. Az ezzel az algoritmussal működő szűrőt kétpontos extrapolátornak nevezzük.
Egy ilyen extrapolátor használatakor az extrapolált koordináták eltérése a cél valódi helyzetétől ( L 1, L 2, L 3) hosszú nézési idővel és nagy céltúlterheléssel egy manőver során, elég jelentős lehet; ebben az esetben a cél aktuális koordinátáit nagy hibás fogyasztók kapják meg. A nagy extrapolációs hibák ahhoz vezethetnek, hogy a következő céljel az automatikus nyomkövető villogó határain kívülre kerül. Mivel a stroboszkópban általában hamis jelek találhatók, ezek közül az egyik kiválasztásra kerül, és a pálya rossz irányba történő folytatására szolgál, és a valódi célpont automatikus követése megszakad.
Hosszan tartó, állandó túlterhelés melletti manőver során a célpont követésének pontossága növelhető a cél gyorsulásának téglalap alakú összetevőinek meghatározásával a pálya íves szakaszán kapott első három jel felhasználásával, és a gyorsulás további szűrésével. Ezt a problémát a segítségével oldják meg "α-β-γ"- szűrő, amelynek ismétlődő algoritmusa a koordináták és azok változási sebességének becslésére ugyanaz marad, mint "α-β"- szűrő, és a célgyorsulás becslése, például koordináták alapján x a bejelölés kézhezvételekor n-a felülvizsgálatot a képlet számítja ki
Felhasználás: automatizált digitális rendszerekben radarinformációk észlelésére és feldolgozására. A találmány lényege: egy légi célpont koordinátáinak diszkrét radaros mérése során a célpálya aktuális paramétereinek simítása a szűrőerősítések változásával a manőver halmozott valószínűségétől függően. Újdonság a szűrő erősítési együtthatók telepítése abban a pillanatban, amikor a célpont belép a lehetséges manőverzónába, a manőver halmozott valószínűségétől függően. A követési pontosság növelése a célmanőver által okozott követési hiba dinamikus összetevőjének kompenzálásával érhető el. 3 ill.
A találmány radarra vonatkozik, és automatizált digitális rendszerekben használható radarinformációk észlelésére és feldolgozására. Ismertek módszerek és eszközök egy manőverező légi cél nyomon követésére, amelyek a koordináták diszkrét radarmérésein és a pályaparamétereinek (koordináták és változási sebességek) aktuális értékelésén (simításon és extrapoláción) alapulnak, feltéve, hogy a megfigyelési időszakban a célpont csak egy nagy intenzitású, szándékos manővert hajtson végre. Ha egy manővert észlel, az ismétlődő simítószűrő memóriája minimálisra csökken. Ebben az esetben, bár a dinamikus simítási hiba, amelyet a manőverező célpont valódi pályáját leíró polinom mértékére vonatkozó hipotézis és mozgásának lineáris hipotézise közötti eltérés okoz, kompenzálódik, a simítási hiba véletlenszerű komponense felveszi a koordináta mérés adott pontosságának maximális értéke, és a teljes hiba növekszik. A manőverező légi cél nyomon követésének ismert módszerei közül a javasolthoz műszaki lényeg és elért hatás szempontjából az a módszer áll a legközelebb, amelyben a manővert az aktuális értékek eltérésének nagyságának elemzése alapján azonosítják. a nyomon követett pálya paramétereit a mért értékektől, és összehasonlítva ezt az eltérést egy küszöbértékkel a manőver azonosításakor a pályaparamétereket egységgel egyenlő szűrőerősítési együtthatókkal simítják ki, mivel a pályaparaméterek simításakor; csak a manőver meglétének tényét veszik figyelembe, a simítási hibák ezzel a módszerrel meglehetősen nagyok maradnak. A találmány célja egy alacsonyan repülő manőverező légi célpont követésének pontosságának javítása. Ezt úgy érik el, hogy az alacsonyan repülő manőverező légi cél követésének módszerében a koordináták diszkrét radaros mérésén és a cél pályájának paramétereinek szűrő segítségével történő simításán alapuló egyenes vonalú mozgás szakaszaiban meghatározott szűrőerősítéssel. a célállapot zajával, amelyeket a csapágyviszonyokból határoznak meg, a csapágyváltozás sebességének megfelelően, valamint a szűrő erősítési együtthatóinak változását a célmanőverszakaszokban, a pályaszakaszba való belépés pillanatában, amelyben a pályajellemzők előzetes információi alapján a manőver lehetséges, a célcsapágy jelét a manőverrel kísért célok halmozott valószínűségének megfelelően beállított szűrőerősítési tényezőkkel simítják: P n = 1/(N-n+1) , ahol N a mérések száma egy lehetséges manőver területén, n pedig a simítási ciklus száma egy lehetséges manőver területén, a csapágyarányokból (p n) + -1 (1) a csapágy változási sebességére (P n) - , ahol a + 2 (2) r  (3) ahol a csapágy mérési hibáinak varianciája; a a cél maximális gyorsulása a csapágy mentén a manőver során; P om valószínűsége a manőver helyes észlelésének; T a radar áttekintési periódusa, és a célmanőver észlelésének pillanatában a csapágyjel egyszeri simításra kerül szűrő erősítési együtthatókkal és az (1) és (2) összefüggésekből az r (4) relációból származó r értékkel, ahol R egy manőver téves észlelésének valószínűsége, és on A következő simítási ciklusokban a célpálya paramétereit szűrő erősítési együtthatókkal simítják, amelyeket az összefüggésekből határoznak meg.
(3) ahol a csapágy mérési hibáinak varianciája; a a cél maximális gyorsulása a csapágy mentén a manőver során; P om valószínűsége a manőver helyes észlelésének; T a radar áttekintési periódusa, és a célmanőver észlelésének pillanatában a csapágyjel egyszeri simításra kerül szűrő erősítési együtthatókkal és az (1) és (2) összefüggésekből az r (4) relációból származó r értékkel, ahol R egy manőver téves észlelésének valószínűsége, és on A következő simítási ciklusokban a célpálya paramétereit szűrő erősítési együtthatókkal simítják, amelyeket az összefüggésekből határoznak meg.
Ahol
(n) (n)
n= int 
m és m a szűrő erősítése a célmanőver észlelésének pillanatában. Az alacsonyan repülő manőverező légi célpontok követésére szolgáló ismert módszerek nem rendelkeznek azokhoz a jellemzőkkel, amelyek megkülönböztetik a javasolt módszert a prototípustól. Az újonnan bevezetett műveletsor jelenléte lehetővé teszi a követés pontosságának növelését a légi cél követésének röppályájáról szóló előzetes információk miatt, és ezáltal minimalizálja a követési hibákat, amelyek a célmanőver elmulasztásakor lépnek fel. Következésképpen az igényelt módszer megfelel az „Újdonság” és a „Feltalálói lépés” kritériumainak. A javasolt módszerből az újonnan bevezetett tulajdonságokkal pozitív hatás elérésének lehetősége a manőverdetektor által kihagyott célmanőver által meghatározott dinamikus csapágy-extrapolációs hiba hatásának kompenzálása, a szűrőerősítések módosításával a a manőver felhalmozott valószínűsége. ábrán. az 1. ábra a célmanőverezés diagramját mutatja; ábrán. 2 grafikon, amely szemlélteti a javasolt módszer hatékonyságát; ábrán. A 3. ábra a javasolt módszer megvalósítására szolgáló eszköz elektromos blokkvázlatát mutatja. Mivel bármely alacsonyan repülő, nagy sebességű légi célpont, amely hirtelen megjelenik és észlelhető például egy radarszállító hajón, támadónak minősül, ésszerű feltételezni, hogy ez a cél nagy valószínűséggel a hajó felé fordul, és végrehajt egy hazaindulási manőver. Más szóval, ahhoz, hogy egy bizonyos időpontban eltaláljon egy hajót, egy alacsonyan repülő, nagy sebességű légi célpontnak egy manővert kell végrehajtania, amelynek eredményeként a célpont hajóhoz viszonyított irányparaméterének nullával kell egyenlővé válnia. E tekintetben a kötelező célmanőver feltételezése alapvetően indokolt. A jövőben egy irányító manővert végrehajtó hajók elleni cirkáló rakétát (ASCM) tekintünk légi célpontnak. A módszer a hajóelhárító rakétarendszer pálya jellemzőinek felhasználásán alapul a pálya utolsó szakaszán. A hajóelhárító rakéta pályája (lásd 1. ábra) a céltól 30 km-nél kisebb távolságban a pálya három jellegzetes szakaszát tartalmazza: egy egyenes szakaszt a hajóelhárító rakéta irányító manőverének megkezdése előtt; lehetséges irányító manőver területe; a pálya egyenes szakasza a ráállási manőver befejezése után. Ismeretes, hogy a hajóellenes rakéták, például a "Harpoon" típusú rakéták irányitó manőverét a célhajótól 5, 3, 20, 2 km távolságban hajtják végre. Feltételezhető, hogy 20,2 km-nél nagyobb távolságban a manőver valószínűsége közel nulla, és a szűrőerősítés korlátozásának szükségessége csak a célállapot-zaj jelenléte miatt van. Az ellenség által ebben a konkrét taktikai helyzetben használt hajóvédelmi rakéták kilövésének módjára vonatkozó előzetes adatok hiányában okkal feltételezhető, hogy a célzási manőver megkezdése minden olyan időpontban valószínű, amikor a hajóellenes rakéta a hajótól számított D min 5,3 km és D max 20,2 km távolságon belül van. A rakéta lefedi a megadott hatótávolságot
t 1 = 50 s ahol V 290 m/s PCR repülési sebesség. Következésképpen feltételezhető, hogy amíg a hajóelhárító rakéta olyan távolságra van a hajótól, amely lehetővé teszi számára, hogy megkezdje az irányitó manővert, N N +1 + 1 koordinátáinak mérésére kerül sor. Mivel egy manőver azonos valószínűséggel kezdődhet bármely intermedier intervallumban, annak az eseménynek a valószínűsége, hogy egy manőver az n-edik (n 1, 2,) intervallumban kezdődik, a priori egyenlő
P
Ha a manőver kezdetét nem észleljük az (n-1) koordináta dimenziónál, akkor az n-edik dimenzióban végrehajtott manőver halmozott valószínűségét az összefüggés határozza meg
P=
A manőver során a hajóellenes rakéta gyorsulási szórásának a felhalmozott valószínűségtől való függése a következőképpen fejezhető ki:
2 a = (1+4P n)(1-P ohm) (5) ahol a a hajóelhárító rakétarendszer maximális gyorsulása a csapágy mentén a manőver során (3,5 g);
P om a manőver helyes észlelésének valószínűsége. Ismerve a PCR (a) gyorsulásának szórását, és feltételezve, hogy a csapágy mérési hibáinak értékei ismertek, kiszámítható a szűrő erősítési együtthatóinak értékei, amelyek optimálisak az áramviszonyokhoz a koordináta mérési hibák szórása, az irányt zavaró gyorsulás és a radar nézési periódusa: irányszöggel
(P n) (6) a csapágy változási sebességével (P n), ahol o 2 a csapágybecslési hibák szórása;
csapágy mérési hiba eltérése;
R a csapágybecslési hibák és a változás mértéke közötti korrelációs együttható. Az o és R o értékeit a következő összefüggések határozzák meg
2 o = + -1
R o = (7)
A (7) relációba (2) és (3) behelyettesítve megkapjuk a csapágybecslési hibák szórását és a csapágybecslési hibák korrelációs együtthatóját és annak változásának mértékét, és a (6) kifejezésre behelyettesítve a az (1) összefüggés által meghatározott szűrőerősítések. Nyilvánvaló, hogy a pcr minden egyes áttekintéssel közeledtével nő a manőver halmozott valószínűsége, ami a p cr gyorsulási diszperzió növekedését okozza, és ennek megfelelően a szűrőerősítések növekedését és a . Manőver észlelésekor a manőver halmozott valószínűsége „egy” értéket kap, és a PCR gyorsulási szóródását a következőképpen számítjuk ki:
= a 2 (1-P selejt) (8), ahol P selejt egy manőver téves észlelésének valószínűsége. Ebben az esetben r-t a (4) relációból számítjuk, a szűrőerősítések maximális értéket kapnak. Figyelembe véve a PCR manőver rövid időtartamát (1,3 s), elegendő egy simítás megnövelt erősítési tényezővel (ezt a szimulációs modellezés eredményei is megerősítik). A manőver valószínűségének felmérésére szolgáló eljárást 20,2 és 5,3 km közötti tartományban hajtják végre. A manőver észlelése után a csapágyszűrő-erősítések csak a célállapot-zaj által meghatározott értékeket kapnak, amelyek a követési idő alatt állandóak, és értékeik a célállapot-zajnak megfelelően kerülnek kiválasztásra. ábrán. A 3. ábra egy manőverező légi cél automatikus követésére szolgáló eszközt mutat be, amely megvalósítja a javasolt módszert. Tartalmaz egy 1 mért koordináta-érzékelőt, egy 2. simítóblokkot, egy 3. extrapolációs blokkot, egy 4. első késleltetési blokkot, egy 5. memóriablokkot, egy 6. manőverészlelő blokkot, egy 7. összehasonlító blokkot, egy 8. második késleltetési blokkot, egy 9. szűrőnyereség kiszámítása. A manőverező légi célpont automatikus követésére szolgáló eszköz egy sorba kapcsolt szenzorból 1 mért koordinátákból áll, melynek bemenete a készülék bemenete, az érzékelő 1 mért koordináták kimenete a simítóblokk 1. bemenetére csatlakozik. 2. ábra és a 6. manőverészlelő blokk 1. bemenetére, a 2. simítóblokk kimenete a 3. extrapolációs blokk bemenetére, a 3. extrapolációs blokk 1. kimenete a 7. összehasonlító blokk bemenetére csatlakozik a 4. késleltetési blokk a 2. simítóblokk 4. bemenetére és a 6. manőverészlelő blokk 2. bemenetére, a 3. blokk extrapolációjának 2. kimenete a készülék kimenete, a 6. manőverészlelő blokk kimenete a a 9. szűrőerősítés számítási blokk 2. bemenete és a 8. késleltetési blokkon keresztül az 5. memóriablokk 2. bemenetére és a 9. szűrőerősítés számítási blokk 3. bemenetére, a 7. összehasonlító blokk kimenete az 1. az 5. memóriablokk bemenete és a 9. blokk 1. bemenete a szűrőerősítés számításához, az 5. memóriablokk kimenete a 2. simítóblokk 2. bemenetéhez, a 9. blokk szűrőerősítés számításához a 3. bemeneti blokkhoz csatlakozik 2 simítás. A készülék a következőképpen működik. A követett célpont koordinátáinak mérésének aktuális n-edik ciklusának videó jele a vevőkészülék kimenetéről a nyomkövető eszköz bemenetére és ennek megfelelően a mért koordináták 1. érzékelőjére kerül. Az 1 mért koordináta-érzékelő a videojelet analógból digitális formába alakítja, kiválasztja a hasznos jelet, és méri a koordináta értékeket: irányszög (П n) és tartomány (D n). Az 1 mért koordináta-érzékelő egy automatikus légi céldetektor ismert sémáinak egyike szerint valósítható meg. A mért célkoordináták (P n és D n) értékei jelkódok formájában a 2. simítóblokk 1. bemenetére kerülnek, amely a koordinátafeldolgozási műveletet a következőképpen valósítja meg: ha n 1, akkor az aktuális becslés a célkoordináták közül az
= M n, ahol M n = П n, D n 2 esetén, a célpályaparaméterek aktuális becslése egyenlő
= M n , V= (M n-1 -M n)/T o ahol T a radar felülvizsgálati időszaka; n>2 esetén a célpálya-paraméterek aktuális becslése egyenlő
= +(M)
= +(M)/T ahol és a súlyozási együtthatók (szűrőnövekedés);
valamint a koordináták becslései és változásuk mértéke egy felmérésre extrapolálva. A 2. blokkból a koordináták simított értékei és változásuk sebessége a 3. extrapolációs blokk bemenetére kerül. A 3. extrapolációs blokk egy adott időpontra extrapolált pályaparaméterek becsléseit állítja elő:
= +VT e; = ahol T e az extrapolációs időintervallumok meghatározott értéke. Ebben a készülékben T e T o, T e T tsu. Ebben az esetben az 1. kimenet idő-extrapolált koordinátaértékei a 4. késleltetési blokkon keresztül a 2. simítóblokk 4. bemenetére kerülnek, ahol a következő ciklusban a pályaparaméterek kiszámítására szolgálnak, és a A 6. manőverészlelő blokk 2. bemenete, ahol levonják azokat az 1. mért koordináta-érzékelőből a 6. manőverészlelő egység 1. bemenetére adott mért csapágyértékekből, és a kapott különbséget a küszöbértékkel hasonlítják össze az alábbiak szerint:
P n ->
A küszöbértékeket a manőver téves észlelésének szükséges valószínűsége alapján választják ki. Ugyanebből a kimenetből az extrapolált koordináták a 7. összehasonlító blokk bemenetére kerülnek, ahol az extrapolált tartomány értékeit összehasonlítják egy lehetséges manőver 5,3 és 20,2 km közötti tartományával. A T e időre extrapolált koordinátaértékek a 3. extrapolációs blokk 2. kimenetére (eszközkimenet) kerülnek, és célmegjelölési adatok generálására és a fogyasztók számára történő kiadására szolgálnak. A 7. összehasonlító blokkban logikai egyes jelet generálunk, ha az extrapolált tartomány értéke a lehetséges értékek tartományába esik, amely a 7 összehasonlító blokk kimenetéről az 5. memóriablokk 1. bemenetére kerül, miközben tiltja. a szűrőerősítések kiadása a 2. simító blokkba, ugyanakkor ugyanaz a jel érkezik a 9. blokk 1. bemenetére a szűrőerősítés számításához, és kezdeményezi az erősítések kimenetét a 2. blokkba simítás céljából. Ha az extrapolált tartomány értékei nem esnek egy lehetséges manőver tartományintervallumán belülre, akkor logikai nulla jel generálódik, amely megtiltja az erősítési tényezők kiadását a 9. blokkból a szűrőerősítések kiszámításához, és kezdeményezi az erősítési tényezők kiadását memóriablokk 5. Az 5-ös memóriablokk a szűrőerősítéseket tárolja, amelyek értékét a célállapot zaja határozza meg. A 9. blokkban a szűrőerősítések kiszámításához logikai egy jel érkezése és manőverészlelő jel hiánya esetén kerül kiszámításra az erősítések az (1), (2) és (3) összefüggések szerint, valamint a „manőver észlelt” jel érkezésének esete az (1), (2) és (4) összefüggések szerint. A 6. blokkban egy „manőver detektált” jelet generálnak, és elküldik a 9. blokknak a szűrőerősítés kiszámítása céljából, ugyanezt a jelet küldik a 8. késleltetési blokknak, és egy felülvizsgálati periódussal késleltetik az 5. és 9. memóriablokknak és a számítási szűrőnek. nyereséget. A javasolt módszer hatékonyságát szimulációs modellezéssel értékelték a következő kezdeti adatokkal:
A szigony típusú hajóelhárító rakétarendszer kilövési hatótávolsága 100 km;
RCC túlterhelés manőver közben 4 g;
Manőver időtartama 4 s;
Radar felülvizsgálati időszak 2s;
A manőver 13 és 14 felülvizsgálat között kezdődik. ábrán. A 2. ábra a normalizált koordináta-extrapolációs hiba felmérésenkénti függését mutatja a mérési számtól, ahol:
1 javasolt módszer;
2 ismert módszer. A javasolt módszer alkalmazásakor a koordináta-extrapoláció pontossága megduplázódik.
Követelés
MANŐVEREZŐ LÉGI CÉL KÖVETÉSÉNEK MÓDSZERE, a koordináták diszkrét radarmérése alapján, a célpálya paramétereinek simítása - - szűrő segítségével a célállapot zaja által meghatározott szűrőerősítő együtthatókkal, egyenes vonalú mozgás szakaszaiban, amelyek összefüggésekből meghatározott: csapágyazással ![]()
ahol j az aktuális simítási ciklus;
a csapágyváltás sebességével
és a szűrő erősítési együttható megváltoztatása a célmanőver szakaszokban, azzal jellemezve, hogy a pályaszakaszba való belépés pillanatában, amelyben a manőver a célpálya jellemzőire vonatkozó előzetes információk alapján lehetséges, a célcsapágy jelét szűrőerősítéssel simítják. a követett célpont manőverének halmozott valószínűségének megfelelően beállított együtthatók,
Pn(Nn+1),
ahol N a mérések száma a lehetséges manőverezési területen;
n a simítási ciklus száma a simítási szakaszban a csapágyviszonyokból lehetséges manőver szakaszában (1)
a csapágycsere sebességével (2) ![]()
![]()

ahol 2 a csapágy mérési hibáinak varianciája;
a a cél irányának megfelelő maximális gyorsulása a manőver során;
P o. m a manőver helyes észlelésének valószínűsége;
T a radar felülvizsgálati időszakáról,
és a célmanőver észlelésének pillanatában a csapágyjel egyszer simításra kerül az (1) és (2) relációból származó a és b szűrővel, az relációból származó r értékkel. 
ahol P l. O. m valószínűsége egy manőver téves észlelésének, és az azt követő simítási ciklusokban a pályaparamétereket szűrőerősítési együtthatókkal simítják, amelyek értékei megfelelnek az aktuális simítási ciklus következő számainak, amelyeket az összefüggésből határoznak meg. 


![]()

ahol i 0, 1, 2, ciklusszám a manőver észlelése után;
telepített szűrőmemória a célállapot zaja miatt;
m és m szűrőerősítés a célmanőver pillanatában.
A radarinformációk kezdeti feldolgozása eredményeként az automatikus nyomkövető algoritmus bemenetén két céljel-folyam érkezik:
„igazi célpontok”, a célpontok tényleges helyzete közelében csoportosítva;
„hamis célpontok”, amelyek egyik része az interferencia és a helyi objektumok visszaverődésének területéhez van kötve, a másik pedig egyenletesen oszlik el az állomás látóterében.
Ha úgy döntünk, hogy a saját radarfelmérés során kapott jelek bizonyos halmaza ugyanahhoz a pályához tartozik, akkor a következő feladat ennek a pályának a paramétereinek becslése, amely a 2.2. bekezdésben tárgyalt paraméterek kiszámításából áll. x 0 ,U 0 ,N 0 ,V x ,V y ,V H ,a x ,a yÉs a H. Ha két célpont van kezdő koordinátaként x 0 ,U 0 És N 0 az utolsó jel koordinátáit és a sebességkomponenseket elfogadjuk V x , V yÉs V H ugyanúgy számítják ki, mint az automatikus pályarögzítésnél.
Nagyobb számú jel megkülönböztetésekor lehetőség nyílik a célmozgás összetettebb modelljére váltani és a pályaparamétereket kisimítani. Simítást végeznek annak érdekében, hogy csökkentsék a radar célkoordinátáinak mérési hibáinak a követési pontosságra gyakorolt hatását. Az ACS-ben leggyakrabban a célmozgások lineáris modellje és a pályaparaméterek szekvenciális simítása létezik.
A szekvenciális simítási módszer lényege, hogy a pályaparaméterek simított értékeit a következő k-ban kapott simított értékekből határozzuk meg az o6zort. k-1) áttekintése és az utolsó eredményei k th megfigyelés. A megfigyelések számától függetlenül a következő számítási ciklusban csak az előző becslés és az új megfigyelés eredménye kerül felhasználásra. Ezzel párhuzamosan a tárolókapacitásra és a hardver sebességére vonatkozó követelmények jelentősen csökkennek.
A k-edik radaros felmérésben a helyzet és a sebesség simítására szolgáló végső kifejezések a következők:
És ezekben a képletekben jól látható, hogy a simított koordinátaérték egyenlő az adott pillanatban extrapolált összeggel k- simított koordináták megfigyelése U* FE és együtthatóval vesszük k az extrapolált koordináta eltérései a mérési eredménytől.
Simított sebességérték be k th felülvizsgálata V * U K a simított sebesség összege V * U K-1 in ( k-1)-edik felülvizsgálat és együttható k az eltéréssel arányos sebességnövekedés.
U=U K- U CE.
N
 Rizs. 2.5. Célpálya-paraméterek simítása.
Rizs. 2.5. Célpálya-paraméterek simítása.
A szaggatott vonal a 2.5. ábrán a simított célpályát jelenti, az ACS számítógépben kiszámítva k-th felülvizsgálata. Tekintettel arra, hogy a simított koordináták együtthatói kés k 0...1 közé esik, a simított kezdeti koordináta az intervallumban van U* CE... U K, és a simított sebesség az V * U K-1… V * U K.
Bebizonyosodott, hogy a cél egyenes vonalú egyenletes mozgása esetén a követési hibák minimálisak, ha az együtthatók kés k képletekkel számítják ki:

 (2.9)
(2.9)
A 2.6. ábra a függést mutatja kés k felülvizsgálati számból k. Az ábrán látható grafikonok azt mutatják, hogy az együtthatók aszimptotikusan közelítenek a nullához. A limitben: kEz biztosítja a célkövetési hibák teljes kiküszöbölését. A gyakorlatban mindig vannak eltérések a célpályán az egyenestől.
Ezért az együtthatók értékei kés k csak bizonyos határokig csökken.
A simítás hatása a célkövetés pontosságára a 2.7. ábra segítségével minőségileg értékelhető. Az egyenes vonalú mozgás szakaszában a simított célkoordináták hibája kisebb, mint a simítatlanoké: a pontozott vonalszakaszok közelebb helyezkednek el a valódi célpályához, mint a folytonos vonalszakaszok. A manőverezési területen a célpont mozgásának valódi természete és a hipotetikus mozgása közötti eltérés miatt dinamikus követési hibák lépnek fel. Mostantól a folytonos vonalak szegmensei pontosabban határozzák meg a cél tényleges helyzetét, mint a szaggatott vonalak szegmensei.
A légvédelmi automatizált vezérlőrendszerben nem manőverező célpontok kísérésekor az együtthatók megválasztása kés k többféle módon állítják elő: vagy újraszámíthatók a kezdeti értékről bizonyos végső értékekre, vagy változatlanok maradnak a teljes fenntartási időszak alatt. Ez utóbbi esetben az optimális szekvenciális simítás úgynevezett exponenciális simítássá válik. A célmanőver észlelése történhet vizuálisan a kezelő által vagy automatikusan. Mindkét esetben manőverezőnek minősül a cél, ha a mért célkoordináta a megengedett koordináta mérési hibákat meghaladó mértékben eltér az extrapolálttól.
Z
Rizs. 2.6. A simítási együtthatók K-tól való függése.
Rizs. 2.7. A simítási pályaparaméterek hatása a célkövetés pontosságára



Általában az aktuális (adott időpontban extrapolált) célkoordináták kiszámítása úgy van időzítve, hogy egybeessen az indikátorokhoz, kommunikációs csatornákhoz, más algoritmusok memóriazónáihoz stb. történő információkimenet pillanataihoz. A célkoordináták előrejelzett értékeit a program a a képletek:

 (2.10)
(2.10)

Ahol t y- átfutási idő, az aktuális pillanattól számítva t.
Általában t y a légi helyzet felmérésénél a parancsnokok állítják be, az egyéb adatfeldolgozási feladatok megoldásakor pedig az ACS számítógép állandó memóriájából olvassák ki.
A célkövetés utolsó szakasza az újonnan megjelenő jelek és a meglévő pályák korrelációjának problémájának megoldása. Ezt a problémát a légtérterületek matematikai kapuzásának módszere oldja meg. Lényege az egyenlőségek teljesülésének gépi ellenőrzésében rejlik, melynek segítségével megállapítható, hogy a jegy a vizsgált területhez tartozik. Ebben az esetben leggyakrabban téglalap vagy kör alakú stroboszkópokat használnak. Paramétereiket a 2.8. ábra mutatja.
Hadd xó, U E - extrapolált célkoordináták egy bizonyos időpontban t. Ha meg szeretné tudni, hogy a következő áttekintésben kapott pontszámok közül melyik kapcsolódik egy adott pályához, ellenőriznie kell a feltételeket:
P
Rizs. 2.8. A kapu paraméterei
|x 1 -x E | x pp; | Y 1 -Y E | Y pp; (2.11)
kör alakú stroboszkóp használatakor -
(x én – x E) 2 + ( Y én – Y E) 2 R pp, (2,12)
Ahol x oldal, Y str - a téglalap alakú villogó méretei;
R pp - a kör alakú villogó mérete.
Az összes lehetséges „pálya-jel” pár számbavétele eredményeként minden felülvizsgálat során megállapítható, hogy mely jelek folytatják a meglévőket, és melyek indítanak új útvonalakat.
A célpályák nyomon követésére szolgáló algoritmusok leírásából jól látható, hogy a levegő helyzetével kapcsolatos információk feldolgozása nagyon munkaigényes folyamat, amely sok RAM-ot és az ACS számítógép sebességét igényel.