Manewrowanie celem w płaszczyźnie poziomej sprowadza się do zmiany kursu i prędkości lotu. Wpływ manewru celu powietrznego na pierwszy i drugi etap naprowadzania myśliwca metodą „Manewru” objawia się na różne sposoby.
Załóżmy, że naprowadzanie odbywa się w pierwszym etapie, gdy cel powietrzny i myśliwiec znalazły się odpowiednio w punktach W I A (ryc. 7.9.), a ich spotkanie było możliwe w tym punkcie Więc .
Ryż. 7.9. Efekt manewru celu w płaszczyźnie poziomej
na torze lotu myśliwca
Jeśli cel powietrzny znajduje się w punkcie W manewrował kursem i czasem T skręcił w róg wt , to aby myśliwiec podążał stycznie do łuku skrętu drugiego etapu naprowadzania, jego kurs musi jednocześnie zmienić się o kąt w i t . Gdy cel powietrzny zakończy manewr, spotkanie z nim stanie się możliwe na miejscu Z , a długość ścieżki celu powietrznego do punktu zmieni się na dr hab.
Jeśli wyobrazimy sobie, że punkt początkowy tury porusza się wraz z TC, znajdującym się względem niego w tej samej odległości i odległości, co wojownik w momencie rozpoczęcia tury, to zawodnik jest prowadzony w stronę tego punktu za pomocą „Parallel Metoda podejścia. Jeśli CC znajduje się w dużej odległości Zanim od myśliwca, w porównaniu z którym odstęp I i wyprzedzającą odległość skrętu Dupr można pominąć, to generalnie właściwości metody „Manewr” są zbliżone do właściwości metody „Podejście równoległe”.
Do późniejszego spotkania myśliwca z celem (DSc > 0) prowadzi ją do odwrócenia się od wojownika (DΘ i > 0) , a zwrócenie się w stronę wojownika prowadzi do wcześniejszego spotkania. Dlatego też środkiem przeciwdziałającym manewrowi kursu celu, podobnie jak w przypadku naprowadzania metodą „podejścia równoległego”, może być jednoczesne namierzanie na niego grup myśliwców z różnych kierunków.
W miarę zmniejszania się odległości do TC różnica pomiędzy właściwościami metody „Manewr” a właściwościami metody „Parallel Approach” staje się coraz bardziej widoczna. W czasie skrętu VT myśliwiec musi wykonywać skręty pod coraz większymi kątami, czyli zwiększa się jego prędkość kątowa w.
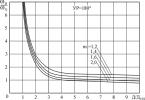
Zmiana wartości w i gdy myśliwiec leci na kursie kolizyjnym z celem powietrznym (UR = 180°) charakteryzuje wykres zależności między prędkościami kątowymi w i / w c od zakresu, wyrażonego w ułamkach odległości zwoju ołowiu D/dupr.
Jak widać na wykresie, na dużych dystansach (D/Dupr = 5÷ 10) postawa w i / w c różni się nieznacznie od jedności, to znaczy prędkość kątowa myśliwca różni się nieznacznie od prędkości kątowej celu manewrującego. Wraz ze spadkiem zasięgu do około trzech Super , wartość wi rośnie intensywnie, a gdy wojownik zbliża się do punktu początkowego tury (D/Dupr = 1)w i wzrasta do nieskończoności.
Tak więc, podczas celowania metodą „Manewru” w manewrujący CC, prawie niemożliwe jest doprowadzenie myśliwca do punktu, w którym zaczyna się zakręt z obliczonym promieniem.

Ryż. 7.10. Zależność stosunku prędkości kątowych w i / w c podczas manewrowania celem
na pierwszym etapie doradztwa dot D/dupr
Podczas procesu naprowadzania w pierwszym etapie cel powietrzny może wykonywać powtarzalne manewry. Na przykład cel powietrzny w danym punkcie W 1 może włączyć wojownika, co daje punkt A1 należy go zawrócić z poprzedniego kursu i zmienić kierunek wcześniej zaplanowanego zakrętu. W rezultacie trajektoria myśliwca na pierwszym etapie naprowadzania zmienia się z linii prostej w złożoną linię składającą się z łuków zakrętów o zmiennym promieniu i prostych odcinków pomiędzy nimi. Wszystko to komplikuje wykonanie lotu do bitwy powietrznej.
Wpływ manewru celu powietrznego rozważymy na drugim etapie naprowadzania myśliwca metodą „Manewru”, korzystając z rysunku 7.11:

Ryż. 7.11. Efekt manewru celu powietrznego w płaszczyźnie poziomej
w drugim etapie naprowadzania metodą „Manewru” na tor lotu myśliwca
Załóżmy, że w pewnym momencie drugiego etapu naprowadzania myśliwiec i cel powietrzny znajdują się odpowiednio w punktach A I W i osiągnąć cel w danym momencie Współ myśliwiec wykonuje zakręt o promieniu Ro i prędkość kątowa w i = Vi/Ro .
Jeśli przez jakiś czas Dt cel powietrzny zmieni kierunek lotu o kąt wc × Dt , wtedy spotkanie z nią stanie się możliwe w punkcie Z . Aby dotrzeć do tego punktu z punktu A myśliwiec musiałby skręcić o innym promieniu R . Ale z góry Dt musiałby dodatkowo skręcić za róg w i D × Dt .
Zatem manewr celu powietrznego na drugim etapie naprowadzania prowadzi do pojawienia się dodatkowej prędkości kątowej obrotu myśliwca w i D . Im mniejszy pozostały kąt skrętu UR wojownik, tym większa wartość w i D , oraz gdy wojownik zbliża się do końcowego punktu tury w i D wzrasta do nieskończoności.
Dlatego prawie niemożliwe jest ustawienie myśliwca w zadanej pozycji względem manewrującego celu powietrznego na drugim etapie naprowadzania metodą „Manewru”.
W związku z tym w przypadku manewrowania celem powietrznym w drugim etapie z reguły przechodzą na prowadzenie myśliwca metodą „pościgu”.
Manewr śledzonego celu, który przekracza czas trwania okresu aktualizacji informacji na wejściu VDU, objawia się pojawieniem się systematycznej składowej błędów filtrowania dynamicznego.
Rozważmy jako przykład proces konstruowania trajektorii celu, która osiąga punkt B(Rys. 12.15) poruszał się równomiernie i prostoliniowo, a następnie rozpoczynał manewr z dużym (1), średnim (2) lub małym (3) przeciążeniem (linie przerywane-kropkowane). Na podstawie oceny parametrów prostego odcinka trajektorii na podstawie wyników filtrowania n pomiarów (zaznaczonych na rysunku kółkiem), aktualnych współrzędnych celu (linia przerywana) oraz ekstrapolowanych współrzędnych do ( N+1)ta recenzja (trójkąt).
| A |
| B |
Jak widać z rysunku, po rozpoczęciu manewru aktualne współrzędne celu, podawane konsumentom, będą zawierać błąd dynamiczny, którego wielkość jest tym większa, im większe jest przeciążenie celu podczas manewru i okres oglądania przestrzeni.
Aby w tych warunkach automatycznie namierzyć cel, należy po pierwsze wykryć (zidentyfikować) manewr, a po drugie, rezygnując z hipotezy o prostoliniowym i równomiernym ruchu celu, określić parametry manewru i na tej podstawie zastosować nowa hipoteza ruchu celu.
Znanych jest kilka metod wykrywania manewru w oparciu o wyniki dyskretnych pomiarów współrzędnych celu:
1. Przyczyną zaprzestania filtrowania zgodnie z hipotezą prostoliniowego ruchu jednostajnego może być przekroczenie modułu resztkowego o pewną stałą wartość. W tym przypadku warunek konieczny kontynuacji filtrowania po odbiorze N znak można przedstawić w następującej formie:
 ;
;  (1)
(1)
gdzie: Δ P, Δ D- stałe określające dopuszczalną wartość rozbieżności, zależne od okresu przeglądu radaru i przyjętej wartości przeciążenia celu podczas manewru;
Pn, D n- wartości namiaru i zasięgu zmierzone w n-tym badaniu;
, - wartości namiaru i zasięgu ekstrapolowane w momencie n-tego pomiaru.
2. Przy wyższych wymaganiach dotyczących jakości wykrywania manewrów w płaszczyźnie poziomej w warunkach śledzenia trajektorii w prostokątnym układzie współrzędnych, przy każdym przeglądzie określa się dopuszczalną wartość rozbieżności i problem rozwiązuje się w następujący sposób:
a) na podstawie wyników każdego pomiaru współrzędnych obliczane są moduły resztkowe ekstrapolowanych i zmierzonych wartości współrzędnych
 ;
; 
 ;
;
b) oblicza się wariancję dyskretnych błędów pomiaru
gdzie σ D, σ P- błędy średniokwadratowe dyskretnego pomiaru zasięgu i namiaru;
c) oblicza się wariancję błędów ekstrapolacji
 ,
,

d) oblicza się wariancję całkowitego błędu pomiaru współrzędnych i ekstrapolacji
| (5) |
e) wartości są porównywane D I  , gdzie jest współczynnikiem wybranym ze względu na zapewnienie akceptowalnego prawdopodobieństwa fałszywego wykrycia manewru.
, gdzie jest współczynnikiem wybranym ze względu na zapewnienie akceptowalnego prawdopodobieństwa fałszywego wykrycia manewru.
Jeśli po porównaniu okaże się, że D>  , wówczas zapada decyzja „oczekiwania na manewr”. Jeżeli nierówność zostanie spełniona po raz drugi, wówczas podejmowana jest decyzja o „manewrze” i przerywane jest filtrowanie parametrów trajektorii zgodnie z przyjętą hipotezą.
, wówczas zapada decyzja „oczekiwania na manewr”. Jeżeli nierówność zostanie spełniona po raz drugi, wówczas podejmowana jest decyzja o „manewrze” i przerywane jest filtrowanie parametrów trajektorii zgodnie z przyjętą hipotezą.
3. Zastosowano także inne podejście do wyboru kryterium wykrywania manewrów. W każdym badaniu obliczana jest funkcja autokorelacji reszt współrzędnych biegunowych z poprzedniego i bieżącego badania
 ,
,

Jeśli nie ma manewru, to Δ D n i Δ P. n niezależne od przeglądu do przeglądu, a funkcje autokorelacji reszt są małe lub nawet zerowe. Obecność manewru znacznie zwiększa matematyczne oczekiwanie iloczynu reszt. Decyzja o rozpoczęciu manewru zostaje podjęta, gdy funkcje autokorelacji przekroczą określony poziom progowy.
DRUGIE PYTANIE BADAWCZE: Śledzenie celu podczas manewru.
W najprostszym przypadku, gdy początek manewru zostanie wykryty po (n+1)-tym naświetleniu celu w dwóch punktach - współrzędne oszacowane w n-tym pomiarze (otwarty okrąg) i współrzędne zmierzone w ( N+1)-te badanie (pełne kółko) oblicza wektor prędkości celu, który można wykorzystać do obliczenia bieżących współrzędnych i współrzędnych ekstrapolowanych na ( N+2)ta recenzja. Następnie współrzędne celu zmierzone w bieżących i poprzednich badaniach wykorzystuje się do skonstruowania trajektorii celu i obliczenia ekstrapolowanych współrzędnych. Filtr działający przy użyciu tego algorytmu nazywany jest ekstrapolatorem dwupunktowym.
Przy zastosowaniu takiego ekstrapolatora odchylenie ekstrapolowanych współrzędnych od rzeczywistego położenia celu ( L 1, L 2, L 3) przy długim czasie obserwacji i dużych przeciążeniach celów podczas manewru może być dość znaczące; w takim przypadku aktualne współrzędne celu zostaną podane konsumentom z dużymi błędami. Duże błędy ekstrapolacji mogą prowadzić do tego, że następny znacznik celu znajdzie się poza granicami stroboskopu automatycznego śledzenia. Ponieważ w stroboskopie zwykle znajdują się fałszywe znaki, jeden z nich zostanie wybrany i użyty do kontynuowania trajektorii w złym kierunku, co spowoduje zakłócenie automatycznego śledzenia prawdziwego celu.
Podczas długotrwałego manewru przy ciągłym przeciążeniu dokładność śledzenia celu można zwiększyć poprzez określenie prostokątnych składowych przyspieszenia celu z pierwszych trzech znaków uzyskanych na zakrzywionym odcinku trajektorii i dalszą filtrację przyspieszenia. Ten problem rozwiązano za pomocą "α-β-γ"- filtr, którego rekurencyjny algorytm szacowania współrzędnych i szybkości ich zmiany pozostaje taki sam jak w "α-β"- filtr i oszacowanie przyspieszenia celu, na przykład według współrzędnych X po otrzymaniu znaku N-ta recenzja jest obliczana według wzoru
Zastosowanie: w zautomatyzowanych systemach cyfrowych do wykrywania i przetwarzania informacji radarowych. Istota wynalazku: dyskretny radarowy pomiar współrzędnych celu powietrznego, wygładzanie bieżących parametrów trajektorii celu wraz ze zmianą wzmocnień filtra w zależności od skumulowanego prawdopodobieństwa wykonania manewru. Nowością jest instalacja współczynników wzmocnienia filtra w momencie wkroczenia celu w możliwą strefę manewru, w zależności od skumulowanego prawdopodobieństwa wykonania manewru. Zwiększenie dokładności śledzenia osiąga się poprzez kompensację dynamicznej składowej błędu śledzenia spowodowanego manewrem celu. 3 chory.
Wynalazek dotyczy radaru i może być stosowany w zautomatyzowanych systemach cyfrowych do wykrywania i przetwarzania informacji radarowych. Znane są metody i urządzenia do śledzenia manewrującego celu powietrznego, oparte na dyskretnych radarowych pomiarach współrzędnych i bieżącej ocenie (wygładzaniu i ekstrapolacji) parametrów jego trajektorii (współrzędnych i szybkości zmian). Przy założeniu, że w okresie obserwacji cel będzie wykonuj tylko jeden celowy manewr o dużej intensywności. Po wykryciu manewru pamięć rekurencyjnego filtra wygładzającego jest minimalizowana. W tym przypadku, choć błąd wygładzania dynamicznego, spowodowany rozbieżnością pomiędzy hipotezą o stopniu wielomianu opisującego prawdziwą trajektorię celu manewrującego a hipotezą liniową jego ruchu, zostaje skompensowany, to uzyskuje się składową losową błędu wygładzania maksymalnej wartości dla danej dokładności pomiaru współrzędnych, a błąd całkowity wzrasta. Ze znanych metod śledzenia manewrowego celu powietrznego najbliższa zaproponowanej pod względem istoty technicznej i osiągniętego efektu jest metoda, w której manewr jest identyfikowany na podstawie analizy wielkości odchylenia wartości prądu parametrów śledzonej trajektorii z ich zmierzonych wartości i porównując to odchylenie z wartością progową w przypadku zidentyfikowania manewru, następuje wygładzenie parametrów trajektorii ze wzmocnieniami filtra równymi jedności. Z uwagi na to, że przy wygładzaniu tylko parametrów trajektorii; brany jest pod uwagę fakt obecności manewru, błędy wygładzania tą metodą pozostają dość duże. Celem wynalazku jest poprawa dokładności śledzenia nisko lecącego manewrowego celu powietrznego. Osiąga się to poprzez to, że w metodzie śledzenia nisko lecącego manewrowego celu powietrznego, opartej na dyskretnym radarowym pomiarze współrzędnych i wygładzaniu parametrów trajektorii celu za pomocą filtra, w odcinkach ruchu prostoliniowego z wyznaczonymi wzmocnieniami filtra przez szum stanu celu, wyznaczany na podstawie zależności namiaru, zgodnie z szybkością zmiany namiaru, oraz zmianę współczynników wzmocnienia filtra w odcinkach manewru celu, w momencie wejścia na odcinek trajektorii, w którym: zgodnie z aprioryczną informacją o cechach trajektorii manewr jest możliwy, sygnał namiaru na cel jest wygładzany współczynnikami wzmocnienia filtra ustawionymi zgodnie ze skumulowanym prawdopodobieństwem manewru towarzyszącym celom: Р n = 1/(N-n+1) , gdzie N jest liczbą pomiarów w obszarze możliwego manewru, a n jest numerem cyklu wygładzania w obszarze możliwego manewru, ze stosunków dla łożyska (p n) + -1 (1) dla szybkości zmiany łożyska (P n) - , gdzie a + 2 (2) r  (3) gdzie jest wariancją błędów pomiaru łożyska; a jest maksymalnym przyspieszeniem celu wzdłuż namiaru podczas manewru; P om prawdopodobieństwo prawidłowego wykrycia manewru; T jest okresem przeglądu radaru i w momencie wykrycia manewru celu sygnał namiaru jest jednokrotnie wygładzany współczynnikami wzmocnienia filtra oraz z zależności (1) i (2) wartością r z zależności r (4) gdzie R jest prawdopodobieństwem fałszywego wykrycia manewru, a w kolejnych cyklach wygładzania parametry trajektorii celu są wygładzane współczynnikami wzmocnienia filtra, które wyznaczane są z zależności
(3) gdzie jest wariancją błędów pomiaru łożyska; a jest maksymalnym przyspieszeniem celu wzdłuż namiaru podczas manewru; P om prawdopodobieństwo prawidłowego wykrycia manewru; T jest okresem przeglądu radaru i w momencie wykrycia manewru celu sygnał namiaru jest jednokrotnie wygładzany współczynnikami wzmocnienia filtra oraz z zależności (1) i (2) wartością r z zależności r (4) gdzie R jest prawdopodobieństwem fałszywego wykrycia manewru, a w kolejnych cyklach wygładzania parametry trajektorii celu są wygładzane współczynnikami wzmocnienia filtra, które wyznaczane są z zależności
Gdzie
(n) (n)
n= wew 
m i m to wzmocnienia filtra w momencie wykrycia manewru celu. Znane metody śledzenia nisko lecącego manewrowego celu powietrznego nie posiadają cech podobnych do cech odróżniających proponowaną metodę od prototypu. Obecność nowo wprowadzonej sekwencji działań pozwala zwiększyć dokładność śledzenia dzięki apriorycznej informacji o trajektorii śledzenia celu powietrznego, a tym samym zminimalizować błędy śledzenia powstające w przypadku pominięcia manewru celu. W konsekwencji zastrzegany sposób spełnia kryteria „nowości” i „poziomu wynalazczego”. Możliwość uzyskania pozytywnego efektu proponowanej metody przy nowo wprowadzonych funkcjach wynika z kompensacji wpływu błędu ekstrapolacji dynamicznego namiaru, wyznaczonego przez manewr celu przeoczony przez detektor manewru, poprzez zmianę wzmocnień filtra zgodnie z skumulowane prawdopodobieństwo wykonania manewru. Na ryc. 1 przedstawia schemat manewrowania celem; na ryc. 2 wykresy ilustrujące skuteczność proponowanej metody; na ryc. Rysunek 3 przedstawia elektryczny schemat blokowy urządzenia umożliwiającego realizację proponowanego sposobu. Ponieważ każdy nisko lecący cel powietrzny z dużą prędkością, który nagle pojawi się i zostanie wykryty na przykład na statku radarowym, zostanie sklasyfikowany jako atakujący, rozsądne jest założenie, że cel ten najprawdopodobniej zwróci się w stronę statku, wykonując manewr bazowania. Innymi słowy, aby trafić w statek w określonym momencie, nisko lecący i szybki cel powietrzny musi wykonać manewr, w wyniku którego parametr kursu celu względem statku musi wynosić zero. W tym względzie założenie obowiązkowego manewru celu jest zasadniczo uzasadnione. W przyszłości za cel powietrzny będziemy uważać przeciwokrętowy pocisk manewrujący (ASCM) wykonujący manewr naprowadzania. Metoda opiera się na wykorzystaniu cech trajektorii rakiet przeciwokrętowych na końcowym odcinku trajektorii. Trajektoria rakiety przeciwokrętowej (patrz rys. 1) w odległości od celu zniszczenia mniejszej niż 30 km obejmuje trzy charakterystyczne odcinki trajektorii: odcinek prosty przed rozpoczęciem manewru naprowadzania rakiety przeciwokrętowej; obszar możliwego manewru bazowania; prosty odcinek trajektorii po zakończeniu manewru naprowadzania. Wiadomo, że manewr naprowadzania rakiet przeciwokrętowych, na przykład typu „Harpoon”, wykonywany jest w odległościach od docelowego statku wynoszących 5, 3, 20, 2 km. Można przyjąć, że na odległościach większych niż 20,2 km prawdopodobieństwo manewru jest bliskie zeru, a konieczność ograniczania wzmocnień filtra wynika jedynie z obecności szumu stanu docelowego. Wobec braku danych a priori na temat sposobu odpalania rakiet przeciwokrętowych stosowanych przez przeciwnika w tej konkretnej sytuacji taktycznej, można przypuszczać, że rozpoczęcie manewru naprowadzania jest równie prawdopodobne w każdym momencie, gdy rakieta przeciwokrętowa znajduje się w zasięgu odległości od statku D min 5,3 km i D max 20,2 km. Pocisk obejmuje określony przedział zasięgu w
t 1 = 50 s gdzie V 290 m/s prędkość lotu PCR. W związku z tym można założyć, że w czasie, gdy rakieta przeciwokrętowa znajdzie się w odległości od okrętu umożliwiającej rozpoczęcie manewru naprowadzania, zostaną wykonane pomiary jej współrzędnych N N +1 + 1. Ponieważ manewr może rozpocząć się z równym prawdopodobieństwem w dowolnym odstępie czasu, prawdopodobieństwo zdarzenia polegającego na rozpoczęciu manewru w n-tym (n 1, 2,) odstępie jest a priori równe
P
Jeżeli początek manewru nie zostanie wykryty w (n-1)-tym wymiarze współrzędnej, to skumulowane prawdopodobieństwo wykonania manewru w n-tym wymiarze wyznacza zależność
P=
Zależność rozrzutu przyspieszenia rakiety przeciwokrętowej podczas manewru od zakumulowanego prawdopodobieństwa można wyrazić następująco:
2 a = (1+4P n)(1-P om) (5) gdzie a jest maksymalnym przyspieszeniem systemu rakiet przeciwokrętowych wzdłuż łożyska podczas manewru (3,5g);
P om prawdopodobieństwo prawidłowego wykrycia manewru. Znając rozrzut przyspieszeń reakcji PCR (a), a także zakładając, że znane są wartości błędów pomiaru łożyska, można obliczyć wartości współczynników wzmocnienia filtra optymalne dla istniejących przekładni rozproszenia błędów pomiaru współrzędnych, przyspieszenia zakłócającego namiar i okresu obserwacji radaru: przez namiar
(P n) (6) przez prędkość zmiany namiaru (P n) gdzie o 2 jest wariancją błędów oszacowania namiaru;
wariancja błędu pomiaru łożyska;
R jest współczynnikiem korelacji pomiędzy błędami oszacowania łożyska a szybkością jego zmian. Wartości o i R o wyznaczają następujące zależności
2 o = + -1
R o = (7)
Podstawiając do relacji (7) relacje (2) i (3) otrzymujemy rozrzut błędów oszacowania łożyska oraz współczynnik korelacji błędów oszacowania łożyska i szybkość jego zmiany, a podstawiając do wyrażenia (6) otrzymujemy wzmocnienia filtrów określone zależnością (1). Oczywiste jest, że w miarę zbliżania się pcr przy każdym przeglądzie skumulowane prawdopodobieństwo wykonania manewru wzrasta, co powoduje wzrost rozproszenia przyspieszenia p cr, a co za tym idzie, pociąga za sobą wzrost wzmocnień filtra i . Po wykryciu manewru skumulowanemu prawdopodobieństwu manewru przypisuje się wartość „jeden”, a rozproszenie przyspieszenia PCR oblicza się w następujący sposób:
= a 2 (1-P złom) (8) gdzie P to prawdopodobieństwo fałszywego wykrycia manewru. W tym przypadku r oblicza się z zależności (4), wzmocnienia filtra osiągają wartość maksymalną. Biorąc pod uwagę krótki czas trwania manewru PCR (1,3 s), wystarczające jest jedno wygładzenie ze zwiększonymi współczynnikami wzmocnienia (co potwierdzają wyniki modelowania symulacyjnego). Procedurę oceny prawdopodobieństwa manewru przeprowadza się w zakresie od 20,2 do 5,3 km. Po wykryciu manewru wzmocnieniom filtra namiaru przypisywane są wartości określone wyłącznie przez szum stanu docelowego; wzmocnienia zasięgu pozostają stałe przez cały czas śledzenia, a ich wartości dobierane są zgodnie z szumem stanu docelowego. Na ryc. Na rys. 3 przedstawiono urządzenie do automatycznego śledzenia manewrującego celu powietrznego, które realizuje proponowaną metodę. Zawiera czujnik mierzonych współrzędnych 1, blok wygładzający 2, blok ekstrapolacji 3, pierwszy blok opóźnienia 4, blok pamięci 5, blok wykrywania manewrów 6, blok porównania 7, drugi blok opóźnienia 8, blok 9 dla obliczanie wzmocnień filtra. Urządzenie do automatycznego śledzenia manewrującego celu powietrznego składa się z szeregowo podłączonego czujnika 1 mierzonych współrzędnych, którego wejście jest wejściem urządzenia, wyjście czujnika 1 mierzonych współrzędnych jest podłączone do 1 wejścia bloku wygładzającego 2 oraz do 1. wejścia bloku detekcji manewrów 6, wyjście bloku wygładzającego 2 połączone z wejściem bloku ekstrapolacji 3, 1. wyjście bloku ekstrapolacji 3 jest podłączone do wejścia bloku porównawczego 7 i poprzez bloku opóźnienia 4 na 4. wejście bloku wygładzającego 2 i na 2. wejście bloku detekcji manewru 6, wyjście 2. bloku 3 ekstrapolacji jest wyjściem urządzenia, wyjście bloku detekcji manewru 6 jest podłączone do 2. wejście bloku 9 obliczania wzmocnienia filtra i poprzez blok opóźnienia 8 do 2. wejścia bloku pamięci 5 i do 3. wejścia bloku 9 obliczania wzmocnienia filtra, wyjście bloku porównania 7 jest podłączone do 1. wejścia bloku pamięci 5 i 1. wejścia bloku 9 do obliczania wzmocnień filtra, wyjście bloku pamięci 5 jest podłączone do 2. wejścia bloku wygładzającego 2, wyjście bloku 9 do obliczania wzmocnień filtra jest podłączone do 3. bloku wejściowego 2 wygładzanie. Urządzenie działa w następujący sposób. Sygnał wideo bieżącego n-tego cyklu pomiaru współrzędnych śledzonego celu z wyjścia urządzenia odbiorczego jest dostarczany na wejście urządzenia śledzącego i odpowiednio do czujnika 1 mierzonych współrzędnych. Czujnik 1 mierzonych współrzędnych przetwarza sygnał wideo z postaci analogowej na cyfrową, wybiera sygnał użyteczny i mierzy wartości współrzędnych: namiar (П n) i zasięg (D n). Czujnik 1 mierzonych współrzędnych można zrealizować według jednego ze znanych schematów automatycznego wykrywacza celów powietrznych. Wartości zmierzonych współrzędnych docelowych (P n i D n) w postaci kodów sygnałowych podawane są na 1. wejście bloku wygładzającego 2, który realizuje operację przetwarzania współrzędnych w następujący sposób: gdy n 1, aktualne oszacowanie współrzędnych celu jest
= M n, gdzie M n = П n, D dla n 2, aktualne oszacowanie parametrów docelowej trajektorii jest równe
= M n , V= (M n-1 -M n)/T o gdzie T jest okresem przeglądu radaru; dla n>2 bieżąca estymacja parametrów trajektorii celu jest równa
= +(M)
= +(M)/T gdzie i są współczynnikami ważenia (wzmocnieniami filtra);
oraz szacunki współrzędnych i tempo ich zmian ekstrapolowane na jedno badanie. Z bloku 2 wygładzone wartości współrzędnych i szybkość ich zmian są dostarczane na wejście bloku ekstrapolacji 3. Blok ekstrapolacji 3 generuje estymatory parametrów trajektorii ekstrapolowane na zadany czas:
= +VT e; = gdzie T e jest określoną wartością przedziałów czasu ekstrapolacji. W tym urządzeniu Te T o, T e Ttsu. W tym przypadku ekstrapolowane w czasie wartości współrzędnych z 1. wyjścia podawane są poprzez blok opóźniający 4 na 4. wejście bloku wygładzającego 2, gdzie służą do obliczenia parametrów trajektorii w kolejnym cyklu, oraz do Drugie wejście bloku detekcji manewru 6, gdzie są one odejmowane od zmierzonych wartości namiaru dostarczonych na pierwsze wejście jednostki detekcji manewru 6 z zmierzonego czujnika współrzędnych 1, a powstałą różnicę porównuje się z progiem w następujący sposób :
P n ->
Wartości progowe dobierane są na podstawie wymaganego prawdopodobieństwa fałszywego wykrycia manewru. Z tego samego wyjścia ekstrapolowane współrzędne przesyłane są na wejście bloku porównawczego 7, gdzie wartości ekstrapolowanego zasięgu porównywane są z zakresem możliwego manewru od 5,3 do 20,2 km. Wartości współrzędnych ekstrapolowane do czasu Te są dostarczane na drugie wyjście bloku ekstrapolacji 3 (wyjście urządzenia) i służą do generowania i wydawania odbiorcom danych o wyznaczeniu celu. W bloku porównania 7 generowany jest sygnał logicznej jedynki, jeżeli wartość ekstrapolowanego zakresu mieści się w zakresie możliwych wartości, który z wyjścia bloku porównania 7 jest podawany na pierwsze wejście bloku pamięci 5, przy czym zabrania się wydanie wzmocnień filtra do bloku wygładzającego 2, w tym samym czasie ten sam sygnał dociera do pierwszego wejścia bloku 9 w celu obliczenia wzmocnień filtra i inicjuje wyprowadzanie wzmocnień do bloku 2 w celu wygładzenia. Jeżeli wartości ekstrapolowanego zakresu nie mieszczą się w przedziale zakresu możliwego manewru, wówczas generowany jest logiczny sygnał zerowy, zakazujący wydawania współczynników wzmocnienia z bloku 9 w celu obliczenia wzmocnień filtrów i inicjujący wydawanie współczynników wzmocnienia z bloku 9 blok pamięci 5. Blok pamięci 5 przechowuje wzmocnienia filtrów, których wartości są określane przez szum stanu docelowego. W bloku 9 obliczania wzmocnień filtra obliczane są wzmocnienia w przypadku nadejścia sygnału logicznej jedynki i braku sygnału wykrycia manewru zgodnie z zależnościami (1), (2) i (3), a w w przypadku nadejścia sygnału „wykryto manewr” zgodnie z zależnościami (1), (2) i (4). W bloku 6 generowany jest sygnał „wykryto manewr” i wysyłany do bloku 9 w celu obliczenia wzmocnień filtra, ten sam sygnał jest wysyłany do bloku opóźnienia 8 i, opóźniony o jeden okres przeglądu, jest wysyłany do bloków 5 i 9 pamięci i obliczeń zysków filtrów. Skuteczność zaproponowanej metody oceniono za pomocą modelowania symulacyjnego, wykorzystując następujące dane wyjściowe:
Zasięg wystrzelenia zestawu rakiet przeciwokrętowych typu harpun wynosi 100 km;
Przeciążenie RCC podczas manewru 4 g;
Czas trwania manewru 4 s;
Okres przeglądu radaru 2 s;
Manewr rozpoczyna się pomiędzy 13 a 14 przeglądami. Na ryc. Rysunek 2 przedstawia zależność znormalizowanego błędu ekstrapolacji współrzędnych na badanie od liczby pomiaru gdzie:
1 proponowana metoda;
2 znana metoda. Wdrożenie proponowanej metody powoduje podwojenie dokładności ekstrapolacji współrzędnych.
Prawo
METODA ŚLEDZENIA MAnewrowego CELU POWIETRZNEGO, oparta na dyskretnym radarowym pomiarze współrzędnych, wygładzaniu parametrów trajektorii celu za pomocą - - filtru w odcinkach ruchu prostoliniowego ze współczynnikami wzmocnienia filtra określonymi przez szum stanu celu, które są określane z relacji: przez łożysko ![]()
gdzie j jest bieżącym cyklem wygładzania;
szybkością zmiany łożyska
oraz zmianę współczynnika wzmocnienia filtra w odcinkach manewru celu, charakteryzującą się tym, że w momencie wejścia na odcinek trajektorii, w którym możliwy jest manewr w oparciu o aprioryczną informację o cechach trajektorii celu, sygnał namiaru na cel jest wygładzany wzmocnieniem filtra współczynniki ustalane zgodnie ze skumulowanym prawdopodobieństwem manewru śledzonego celu,
Pn(Nn+1),
gdzie N jest liczbą pomiarów w obszarze możliwego manewru;
n numer cyklu wygładzania w odcinku wygładzającym w odcinku możliwego manewru z zależności łożyskowych (1)
według szybkości wymiany łożyska (2) ![]()
![]()

gdzie 2 jest wariancją błędów pomiaru łożyska;
a maksymalne przyspieszenie celu w zależności od namiaru podczas manewru;
P o. m prawdopodobieństwo prawidłowego wykrycia manewru;
T o okresie przeglądu radaru,
oraz w momencie wykrycia manewru celu sygnał namiaru jest jednokrotnie wygładzany przez filtr wzmocnieniami a i b z zależności (1) i (2), wartością r z zależności 
gdzie Pl. O. m prawdopodobieństwo fałszywego wykrycia manewru, a w kolejnych cyklach wygładzania parametry trajektorii są wygładzane współczynnikami wzmocnienia filtra, których wartości odpowiadają kolejnym numerom bieżącego cyklu wygładzania, które wyznaczane są z zależności 


![]()

gdzie i 0, 1, 2, numer cyklu po wykryciu manewru;
zainstalowana pamięć filtra ze względu na szum stanu docelowego;
m i m wzmocnienia filtra w momencie manewru celu.
W wyniku wstępnego przetwarzania informacji radarowej na wejście algorytmu automatycznego śledzenia odbierane są dwa strumienie znaków celu:
„cele rzeczywiste”, pogrupowane w pobliżu rzeczywistej pozycji celów;
„fałszywych celów”, których jedna część jest powiązana z obszarami zakłóceń i odbić od lokalnych obiektów, a druga jest równomiernie rozmieszczona w obszarze widzenia stacji.
Jeżeli zostanie ustalone, że określony zbiór znaków, każdy otrzymany w ramach własnego badania radarowego, należy do tej samej trajektorii, kolejnym zadaniem jest oszacowanie parametrów tej trajektorii, co polega na obliczeniu parametrów omówionych w paragrafie 2.2. X 0 ,U 0 ,N 0 ,V X ,V y ,V H ,A X ,A y I A H. Jeśli istnieją dwa znaki celu jako współrzędne początkowe X 0 ,U 0 I N 0 akceptowane są współrzędne ostatniego znaku i składowe prędkości V X , V y I V H są obliczane w taki sam sposób, jak w przypadku automatycznego przechwytywania trajektorii.
Przy rozróżnianiu większej liczby śladów istnieje możliwość przejścia na bardziej złożony model ruchu celu i wygładzenia parametrów trajektorii. Wygładzanie przeprowadza się w celu ograniczenia wpływu błędów pomiaru współrzędnych celu radarowego na dokładność śledzenia. Najczęściej w ACS występuje liniowy model ruchu celu i sekwencyjne wygładzanie parametrów trajektorii.
Istotą metody wygładzania sekwencyjnego jest to, że wygładzane wartości parametrów trajektorii są w następnej kolejności k th o6zor wyznacza się na podstawie wygładzonych wartości uzyskanych w ( k-1) recenzja i wyniki ostatniej k obserwacja. Niezależnie od liczby wykonanych obserwacji, w kolejnym cyklu obliczeniowym uwzględnia się jedynie poprzednie oszacowanie i wynik nowej obserwacji. Jednocześnie wymagania dotyczące pojemności pamięci i szybkości sprzętu są znacznie zmniejszone.
Ostateczne wyrażenia służące do wygładzania pozycji i prędkości w k-tym badaniu radarowym są następujące:
I w tych wzorach jest jasne, że wygładzona wartość współrzędnej jest równa sumie ekstrapolowanej w tej chwili k- obserwacje wygładzonych współrzędnych U* FE i wzięty ze współczynnikiem k odchylenia ekstrapolowanej współrzędnej od wyniku pomiaru.
Wygładzona wartość prędkości w k recenzja V * U K jest sumą wygładzonej prędkości V * U K-1 w ( k-1)-ta recenzja i wzięta ze współczynnikiem k przyrost prędkości proporcjonalny do odchylenia.
U=U K- U CE.
N
 Ryż. 2.5. Wygładzanie parametrów trajektorii celu.
Ryż. 2.5. Wygładzanie parametrów trajektorii celu.
Linia przerywana na rys. 2.5 oznacza wygładzoną trajektorię celu, obliczoną w komputerze ACS k-ta recenzja. Z uwagi na to, że współczynniki wygładzonych współrzędnych k i k leżą w przedziale 0...1, wygładzona współrzędna początkowa znajduje się w przedziale U* CE... U K, a wygładzona prędkość wynosi V * U K-1… V * U K.
Udowodniono, że przy prostoliniowym, jednostajnym ruchu celu błędy śledzenia będą minimalne, jeśli współczynniki k i k oblicza się za pomocą wzorów:

 (2.9)
(2.9)
Rysunek 2.6 przedstawia zależność k i k z numeru recenzji k. Wykresy na rysunku pokazują, że współczynniki asymptotycznie zbliżają się do zera. W limicie o godz kZapewnia to całkowitą eliminację błędów śledzenia celu. W praktyce zawsze występują odchylenia trajektorii celu od linii prostej.
Dlatego wartości współczynników k i k spadać tylko do pewnych granic.
Wpływ wygładzania na dokładność śledzenia celu można ocenić jakościowo korzystając z rys. 2.7. Na odcinku ruchu po linii prostej błąd wygładzonych współrzędnych celu jest mniejszy niż niewygładzonych: odcinki linii przerywanej są położone bliżej prawdziwej trajektorii celu niż odcinki linii ciągłej. Na polu manewrowym, ze względu na rozbieżność pomiędzy rzeczywistym charakterem ruchu celu a hipotetycznym, powstają dynamiczne błędy śledzenia. Teraz odcinki linii ciągłych dokładniej określają rzeczywistą pozycję celu w porównaniu do odcinków linii przerywanych.
W zautomatyzowanym systemie kierowania obroną powietrzną, towarzyszącym celom niemanewrującym, dobór współczynników k i k produkowane na różne sposoby: można je albo przeliczyć z wartości początkowych na pewne wartości końcowe, albo pozostawić niezmienione przez cały okres konserwacji. W tym drugim przypadku optymalne wygładzanie sekwencyjne zamienia się w tzw. wygładzanie wykładnicze. Wykrywanie manewru celu może być dokonywane wizualnie przez operatora lub automatycznie. W obu przypadkach cel uważa się za manewrujący, jeżeli zmierzona współrzędna celu różni się od ekstrapolowanej o wielkość przekraczającą dopuszczalne błędy pomiaru współrzędnych.
Z
Ryż. 2.6. Zależność współczynników wygładzania od K.
Ryż. 2.7. Wpływ wygładzania parametrów trajektorii na dokładność śledzenia celu



Zazwyczaj obliczenie bieżących (ekstrapolowanych w danym momencie) współrzędnych celu odbywa się w czasie tak, aby pokrywało się z momentami przekazywania informacji do wskaźników, kanałów komunikacyjnych, stref pamięci innych algorytmów itp. Przewidywane wartości współrzędnych celu są obliczane za pomocą formuły:

 (2.10)
(2.10)

Gdzie T y- czas realizacji liczony od chwili obecnej T.
Zazwyczaj T y przy ocenie sytuacji powietrznej ustalają ją dowódcy, a przy rozwiązywaniu innych zadań związanych z przetwarzaniem danych odczytywana jest z pamięci stałej komputera ACS.
Ostatnim etapem śledzenia celu jest rozwiązanie problemu korelacji nowo pojawiających się śladów z istniejącymi trajektoriami. Problem ten rozwiązuje się metodą matematycznego bramkowania obszarów przestrzeni powietrznej. Jego istota polega na maszynowej weryfikacji spełnienia równości, za pomocą której stwierdza się, że znak należy do badanego obszaru. W tym przypadku najczęściej stosuje się stroboskopy prostokątne lub okrągłe. Ich parametry pokazano na rys. 2.8.
Pozwalać X Uch, U E - ekstrapolowane współrzędne celu w pewnym momencie T. Aby dowiedzieć się, która z ocen otrzymanych w kolejnej recenzji dotyczy danej trajektorii, należy sprawdzić warunki:
P
Ryż. 2.8. Parametry bramy
|X 1 -X E | X pp; | Y 1 -Y E | Y pp; (2.11)
podczas używania okrągłego stroboskopu -
(X I – X mi) 2 + ( Y I – Y E) 2 R pp, (2.12)
Gdzie X strona, Y str - wymiary stroboskopu prostokątnego;
R pp - rozmiar okrągłego stroboskopu.
W wyniku wyliczenia wszystkich możliwych par „trajektoria-znak” w każdym przeglądzie ustala się, które znaki stanowią kontynuację istniejących, a które inicjują nowe trasy.
Z opisu algorytmów śledzenia trajektorii celów jasno wynika, że przetwarzanie informacji o sytuacji powietrznej jest procesem bardzo pracochłonnym, wymagającym dużej ilości pamięci RAM i szybkości komputera ACS.