Las características técnicas del Mitsubishi Outlander están determinadas por tres opciones para las centrales eléctricas utilizadas. Dos "cuatro" de gasolina con un volumen de 2.0 y 2.4 litros dan 146 y 167 hp. respectivamente. En la parte superior de la gama de motores se encuentra el motor V6 de 3.0 litros provisto para la versión Mitsubishi Outlander Sport. Desarrolla una potencia máxima de 230 CV. y genera un par de 292 Nm (a 3750 rpm).
La modificación superior del Outlander implica la instalación de una transmisión automática de 6 velocidades en pareja con la unidad de potencia. Otras versiones del crossover están equipadas con un Jatco CVT de octava generación con convertidor de par. Tándem V6 230 CV y 6AKPP proporciona a la versión deportiva de Outlander una buena dinámica: hasta 100 km / h, el automóvil acelera en 8,9 segundos. La opción crossover, que esconde cualquiera de un par de unidades de 4 cilindros bajo el capó, no puede presumir de tanta agilidad, gastando más de 10 segundos en un arranque a “cientos”.
El consumo medio de combustible del Mitsubishi Outlander varía de 7,3 a 8,9 litros. El más "insaciable", por supuesto, es el "seis" de 3,0 litros, según datos del pasaporte, que consume unos 12,2 litros de combustible en el ciclo urbano.
Los parámetros geométricos de la carrocería del automóvil son interesantes principalmente por la igualdad de los ángulos de entrada y salida, cada uno de los cuales no supera los 21 grados. El ángulo de la rampa es de la misma importancia. La distancia al suelo (distancia libre) Mitsubishi Outlander es de 215 mm.
El crossover japonés está disponible en versiones de tracción delantera y tracción total. La tracción delantera se proporciona solo para versiones con un motor "junior" de 2.0 litros. La tracción en las cuatro ruedas tiene dos configuraciones posibles: All Wheel Control (AWC) y Super All Wheel Control (S-AWC). La segunda opción, que agrega estabilidad en curvas de alta velocidad y en superficies resbaladizas, fue desarrollada específicamente para el Outlander Sport 3.0.
Especificaciones Mitsubishi Outlander - tabla resumen:
| Parámetro | Outlander 2.0 CVT 146 CV | Outlander 2.4 CVT 167 CV | Outlander Sport 3.0 de 230 CV | |
|---|---|---|---|---|
| Motor | ||||
| tipo de motor | gasolina | |||
| Tipo de inyección | repartido | |||
| sobrealimentación | No | |||
| Número de cilindros | 4 | 6 | ||
| Disposición del cilindro | fila | en forma de V | ||
| Número de válvulas por cilindro | 4 | |||
| Volumen, cu. cm. | 1998 | 2360 | 2998 | |
| Potencia, caballos de fuerza (a rpm) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| Transmisión | ||||
| Unidad de manejo | parte delantera | lleno (AWC) | lleno (AWC) | lleno (S-AWC) |
| Transmisión | accionamiento de velocidad variable | 6transmisión automática | ||
| Suspensión | ||||
| Tipo de suspensión delantera | Tipo MacPherson independiente | |||
| Tipo de suspensión trasera | independiente, multienlace | |||
| Sistema de frenos | ||||
| frenos delanteros | disco ventilado | |||
| Frenos traseros | disco ventilado | |||
| Direccion | ||||
| Tipo de amplificador | eléctrico | |||
| Neumáticos y ruedas | ||||
| Tamaño de llanta | 215/70 R16 | 225/55R18 | ||
| Tamaño del disco | 6.5Jx16 | 7.0Jx18 | ||
| Combustible | ||||
| Tipo de combustible | AI-92 | AI-95 | ||
| Volumen del tanque, l | 63 | 60 | 60 | |
| El consumo de combustible | ||||
| Ciclo de ciudad, l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| Ciclo de campo, l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| Ciclo combinado, l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| dimensiones | ||||
| Numero de asientos | 5 | |||
| Longitud, mm | 4695 | |||
| Ancho, mm | 1800 | |||
| Altura (con rieles de techo), mm | 1680 | |||
| Distancia entre ejes, mm | 2670 | |||
| Ancho de vía de la rueda delantera, mm | 1540 | |||
| Ancho de vía de la rueda trasera, mm | 1540 | |||
| Volumen del maletero (mín./máx.), l | 591/1754 | 477/1640 | ||
| Distancia al suelo (distancia libre), mm | 215 | |||
| Peso | ||||
| Equipado, kg | 1425 | 1490 | 1505 | 1580 |
| lleno, kg | 1985 | 2210 | 2270 | |
| Peso máximo del remolque (con frenos), kg | 1600 | |||
| Características dinámicas | ||||
| Velocidad máxima, km/h | 193 | 188 | 198 | 205 |
| Tiempo de aceleración a 100 km/h, s | 11.1 | 11.7 | 10.2 | 8.7 |
Motores Mitsubishi Outlander - especificaciones
Los tres motores disponibles para el crossover están equipados con el sistema de control de elevación de válvulas MIVEC. Permite, en función de la velocidad, cambiar el modo de funcionamiento de las válvulas (tiempo de apertura, superposición de fases), lo que ayuda a aumentar la potencia del motor, ahorrar combustible y reducir las emisiones nocivas.
Características de los motores Mitsubishi Outlander:
| Parámetro | Outlander 2.0 146 CV | Outlander 2.4 167 CV | Outlander 3.0 230 CV |
|---|---|---|---|
| Código de motor | 4B11 | 4B12 | 6B31 |
| tipo de motor | gasolina sin turbo | ||
| Sistema de suministros | inyección distribuida, sistema electrónico de control de válvulas MIVEC, dos árboles de levas (DOHC), transmisión por cadena de distribución | inyección distribuida, sistema electrónico de control de válvulas MIVEC, un árbol de levas por banco de cilindros (SOHC), transmisión por correa de distribución | |
| Número de cilindros | 4 | 6 | |
| Disposición del cilindro | fila | en forma de V | |
| Número de válvulas | 16 | 24 | |
| Diámetro del cilindro, mm | 86 | 88 | 87.6 |
| Carrera del pistón, mm | 86 | 97 | 82.9 |
| Índice de compresión | 10:1 | 10.5:1 | |
| Volumen de trabajo, cu. cm. | 1998 | 2360 | 2998 |
| Potencia, caballos de fuerza (a rpm) | 146 (6000) | 167 (6000) | 230 (6250) |
| Par, N*m (a rpm) | 196 (4200) | 222 (4100) | 292 (3750) |
Sistema de tracción total Mitsubishi Outlander
El sistema All Wheel Control (AWC) es una configuración de tracción delantera en la que el eje trasero está conectado mediante un embrague electromagnético controlado electrónicamente. Hasta el 50% del empuje se puede dirigir hacia atrás. Hay tres modos de funcionamiento de la unidad AWC: ECO, Auto y Lock. En modo económico, todo el par se transfiere al eje delantero por defecto, y el trasero se activa solo cuando patina. El modo Auto distribuye el esfuerzo de forma óptima, en función de los datos recibidos por la unidad electrónica (velocidad de las ruedas, posición del pedal del acelerador). El modo de bloqueo aumenta la cantidad de par transmitido a las ruedas traseras, lo que garantiza una aceleración segura y un comportamiento más estable en superficies inestables. La principal diferencia entre Lock y Auto es que las ruedas traseras inicialmente obtienen más tracción, independientemente de si se detecta o no un deslizamiento. 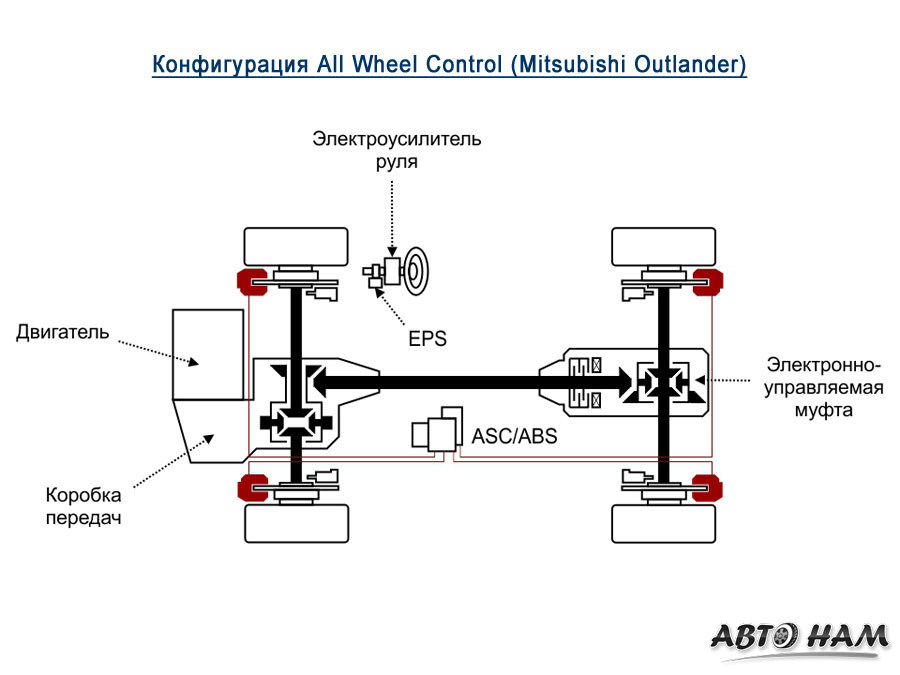
El sistema Super All Wheel Control (S-AWC) es una variación avanzada del AWC convencional, en el que se instala un diferencial activo (AFD) en el eje delantero, que distribuye la potencia entre las ruedas. Así, aparece un mecanismo adicional para controlar el comportamiento del automóvil. El S-AWC incluye un sistema de estabilización, ABS, dirección asistida eléctrica y sistema de frenos. Así, la unidad de control del sistema Super All Wheel Control, bajo ciertas condiciones, puede iniciar el frenado de las ruedas, por ejemplo, en caso de derrape durante el paso de una curva.
El selector de tracción total S-AWC tiene cuatro posiciones: Eco, Normal, Snow y Lock. El modo nieve optimiza la configuración del sistema para conducir sobre superficies resbaladizas. 
Quizás cada vez que veamos las palabras "nuevo", "revolucionario", "inigualable", queramos exclamar algo ingenioso. Algo sobre una bicicleta y sobre inventores, sobre perros y el número de extremidades, o algo no menos sarcástico. El sentido común, sin embargo, nos dice que las cosas no son tan simples. No siempre los automóviles estaban equipados con sistemas electrónicos de estabilización, una vez que el ABS, que ahora se ha vuelto familiar, se introdujo por primera vez en un automóvil. ¿Qué tal hoy? La falta de ABS a menudo es desconcertante, y ESP ya se ha convertido en un equipo obligatorio para la instalación en todos los automóviles de pasajeros en Canadá, EE. UU. y, más recientemente, en Europa. Entonces, ¿qué hay de nuevo que nos ofrecen los ingenieros de MMC? Intentemos resolverlo.
Estrictamente hablando, la abreviatura S-AWC ya nos resulta familiar. Este sistema se utilizó por primera vez en el legendario Mitsubishi Lancer Evo X. Y, sin embargo, los representantes de Mitsubishi insisten en que, aunque las "letras son las mismas", todo está dispuesto de manera un poco diferente en el nuevo Outlander. En general, el S-AWC en sí mismo no es tanto una solución específica, un conjunto de unidades, como un concepto ideológico, cuya esencia, si ignoramos las pequeñas cosas, es proporcionar al automóvil una dirección neutral en esas condiciones cuando se desarrolla subviraje o sobreviraje, además de garantizar un agarre óptimo de las ruedas motrices con la carretera.
¿Cómo se logra esto? En Evolution, el sistema constaba de las siguientes unidades:
Diferencial central activo (ACD), que es esencialmente un embrague multidisco hidráulico controlado electrónicamente, cuya tarea principal es la distribución de par entre los ejes más un "bloqueo suave y uniforme" del diferencial central para optimizar la transferencia de par a los ejes delantero/trasero y proporciona un modo de agarre equilibrado con caro manteniendo la capacidad de control.
Active Yaw Control (AYC) controla la distribución del par entre las ruedas traseras para brindar estabilidad al conducir en una curva, y también puede bloquear parcialmente el diferencial para transferir el par a una rueda con más "agarre".
El control activo de estabilidad (ASC) brinda la mejor tracción a las ruedas del vehículo al ahogar el motor según sea necesario y ajustar la fuerza de frenado en cada rueda. Cabe señalar que lo inusual de este sistema fue que MMC introdujo por primera vez sensores de fuerza en el sistema de frenos (además de los sensores estándar para tales sistemas, un acelerómetro y un sensor de posición del timón), lo que proporcionó al sistema más datos precisos, y por tanto una respuesta más adecuada.
Y por último, el sistema de control de tracción (ABS) con ambientación deportiva. El sistema recibe la velocidad de rotación de cada rueda más el ángulo de las ruedas delanteras y utiliza el sistema de frenos para liberar o, por el contrario, frenar cada rueda individual.
¿Qué pasa con Outlander? Sí, no es una coincidencia que analicemos de cerca los componentes del sistema S-AWC del Lancer Evo X antes de pasar al nuevo crossover. Aquí, los ingenieros de la compañía no se andan con rodeos, el sistema del "Lancer" y el de nuestro automóvil realmente difieren bastante en el diseño, como veremos ahora. Entonces, ¿qué unidades pertenecen al nuevo sistema de tracción total del Outlander?

Diferencial delantero activo (AFD). Regula la distribución de par entre las ruedas del eje delantero.
Dirección asistida eléctrica (EPS). No es casualidad que esté asignado al sistema de tracción total S-AWC. Su tarea es compensar de forma adaptativa las fuerzas reactivas en el volante que se producen cuando el momento se redistribuye en las ruedas delanteras, proporcionando una dirección cómoda en condiciones de operación AFD activa.
Embrague electromagnético. Conecta el eje trasero, regula el par transmitido al eje trasero.
Unidad de control S-AWC. A diferencia de los sistemas convencionales, utiliza un conjunto ampliado de sensores de aceleración para determinar la dirección de desplazamiento del vehículo, así como la velocidad angular y las cargas laterales.
¿Cuál es la diferencia? Personalmente, me llamaron la atención dos, y bastante serios. En el eje delantero, en lugar de un diferencial de deslizamiento limitado, ahora tenemos un diferencial delantero controlado con posibilidad de bloqueo parcial y capacidad de distribuir el par entre las ruedas. Por supuesto, la inclusión de un sistema de este tipo sobre la marcha no podría afectar la conducción de la mejor manera. Sentiríamos todo el trabajo sobre el volante en forma de fuerza reactiva, en la práctica - tirones, y no en el momento más conveniente, ya que está claro que el sistema funcionará cuando las condiciones de conducción sean, por decirlo suavemente, desfavorables .
Pero aquí entra en juego otro subsistema, a saber, la dirección asistida eléctrica. Adapta la ganancia sobre la marcha, compensando el cambio en la fuerza de reacción en el volante cuando se activa el embrague del diferencial delantero activo. Y todo esto es casi imperceptible para el conductor y sin pérdida de control.
Por lo tanto, tenemos un conjunto de herramientas suficiente para influir en el comportamiento del automóvil, y todo lo demás está en manos de los ingenieros que programan y configuran el sistema de control de todas estas herramientas para nosotros. ¿Qué nos están dando?
Y dar al conductor cuatro modos de funcionamiento del sistema.
Mitsubishi Outlander 2.4 AT en el máximo Bortzhurnal Toda la verdad sobre la tracción total "permanente"
No hace mucho tiempo escribí aquí cómo me quedé atascado en mi ATV.
Este caso me molestó un poco y me interesó mucho qué tipo de impulso completo tenía que no podía salir del ventisquero.
Y fui a Google y leí los foros y así es como me lo imagino.
La tracción a las cuatro ruedas se divide en dos grandes grupos, constante completo y enchufar.
Constante. aquí es cuando el momento se transmite a los 4
ruedas, por ejemplo, mi jeep 🙂 una de estas
Enchufar. esto es cuando el automóvil se conduce principalmente a un eje, como el eje delantero, y cuando el eje motriz se desliza, se activa automáticamente antes de que no esté activo (también puede encenderlo con los botones, pero generalmente solo a baja velocidad o mierda, t por un tiempo), un sistema similar en el Out XL y la gran mayoría de los SUV modernos.
Como comprenderá, me interesó el primer tipo de tracción total, permanente.
Resulta que se divide en un montón de variedades.
Leer también
Pero antes, un poco de teoría 🙂
Diferencial. es un dispositivo mecánico que permite que las ruedas giren a diferentes velocidades.
Y esto hay que hacerlo desviado, porque en los giros las ruedas giran a diferentes velocidades, y para que el giro sea más cómodo y no haya desgaste de la goma, el diferencial permite repartir el par entre estas ruedas en diferentes proporciones. .
En un vehículo con tracción en las cuatro ruedas, por ejemplo, en el primer diferencial del Outlander de primera generación. Uno para cada eje. los ejes delantero y trasero, que sirven para distribuir el par entre las ruedas de los respectivos ejes, más el eje central, que distribuye el par entre los ejes.
Cómo funciona la tracción total del Mitsubishi Outlander S-AWC
Trabajo completo manejar Mitsubishi Outlander (no hay ESP en el coche).
Cómo funciona Mitsubishi Outlander AWD sobre rodillos
[correo electrónico protegido] www.diffblock.com vk.com/diffblockMitsubishi Outlander 2013 (2.4l 200cv). pruebas tracción en las cuatro ruedas .
Así, en mi Out, cuando está parado sobre una superficie plana, el momento se distribuye a partes iguales a todas las ruedas, es decir, en un 25% (por cierto, esto no es así en todas partes, en Subaru, por ejemplo, según a la distribución de ejes, que es 90% por tipo eje delantero 10% por detrás).
Leer también
Pero la emboscada es que el diferencial se transfiere la mayor parte del tiempo a la rueda menos cargada, por lo que cuando una rueda se desliza o se desliza, todo el momento pasa a ella, ¡y el resto de las ruedas están estacionarias!
Para evitar que esto suceda, existen bloqueos de diferencial. Que siempre puede transferir el mismo tiempo al eje y las ruedas.
Y los castillos pueden ser como uno. eje central, entonces el momento se transmite igual a ambos ejes, pero distribuido entre las ruedas a lo largo de los ejes sobre la base de la menor resistencia, por lo tanto, con un bloqueo, es suficiente tener dos ruedas, una trasera y otra delantera. para que el coche pueda ponerse de pie.
y algunos en el eje positivo de cada eje de cada rueda, el coche girará hasta que todas las ruedas se atasquen :)
Y aquí duro bloqueo, es decir, al presionar el botón, bloquea a la fuerza los diferenciales y todas las ruedas siempre dan el mismo tiempo, ayuda mucho y luego al menos una rueda en una superficie dura, por otro lado, girará violentamente para romper el control.
también hay auto por ejemplo, en mi Out usando viskomufty, que es una especie de basura con un líquido gelatinoso adentro, en un fallo, algo comienza a enfurecerse allí, líquido dentro espesa y entre el diferencial del eje está bloqueado,
Pero la viskomufta no es la más conveniente para los vagabundos todoterreno. lleva mucho tiempo funcionando y tengo entendido que no pasa un eje honesto al 50% libre.
Y ahora mi caso, el delantero derecho, que estaba en el aire, y giré violentamente, respectivamente, en el momento delantero izquierdo no giró en absoluto, pero en el eje trasero del acoplamiento viscoso fue desplazado por parte de el momento, pero aparentemente no fue suficiente para que el eje trasero sacara el frente del ventisquero, así que hasta que exploté, no pude moverme.
El sistema de tracción en todas las ruedas controlado electrónicamente tiene tres modos de operación, que se pueden seleccionar girando un interruptor dependiendo de las condiciones del camino.
Los modos de conducción son los siguientes.
Conducir un vehículo con tracción en las cuatro ruedas requiere habilidades de conducción especiales.
Lea atentamente la sección "Uso del 4WD" y mantenga un estilo de conducción seguro.
La elección del régimen se realiza mediante el giro del interruptor al encendido incluido.
- 4WD AUTOMÁTICO
- BLOQUEO 4WD
En el momento de cambiar el modo de conducción, el nuevo modo se muestra en la ventana de información de la pantalla multifunción, interrumpiendo las lecturas actuales por un tiempo.
Después de unos segundos, la ventana anterior vuelve a aparecer en la pantalla.
Advertencia
- Está prohibido cambiar el modo de conducción en el momento en que las ruedas delanteras patinan (por ejemplo, en la nieve). Esto puede hacer que el vehículo se sacuda en una dirección impredecible.
- Conducir en carreteras pavimentadas secas en modo 4WD LOCK da como resultado un mayor consumo de combustible y mayores niveles de ruido.
- No se recomienda conducir en modo 2WD si las ruedas patinan.
Esto puede conducir al sobrecalentamiento de las unidades y conjuntos de transmisión.
Nota
El modo de conducción se puede cambiar tanto en el estacionamiento como mientras se conduce.
La ventana de visualización aparece cuando se conecta el encendido, luego se muestra durante unos segundos después de arrancar el motor. 
La pantalla muestra las siguientes ventanas de visualización del modo de conducción.
| Modo de conducción | ||
|---|---|---|
| Indicador 4WD | Indicador de BLOQUEO | |
| 2WD | APAGADO | APAGADO |
| 4WD AUTOMÁTICO | INCLUIDO | APAGADO |
| BLOQUEO 4WD | INCLUIDO | INCLUIDO |
Advertencia

El esquema de tracción total "real" más común se utilizó en casi todos los modelos originales de tracción delantera. Aquí hay tres diferenciales, el diferencial central (ubicado, según el esquema específico, en la caja de cambios o en la caja de transferencia) está bloqueado y el momento se distribuye uniformemente entre los ejes. Este principio es similar.
- Ventajas: estabilidad en la carretera, relativa previsibilidad del comportamiento, buena capacidad y confiabilidad a campo traviesa.
- Contras: coeficiente de bloqueo insuficiente con un acoplamiento viscoso y la velocidad de su "operación".
| Modelo | Modificaciones |
| Lancer-Mirage-Libero | (CCxA*) escotilla. 1991-1996, (CDxA) sed. 1991-1996, (CDxW) meneo. 1992-1999 |
| Lancer espejismo | (CLxA) 1996-2001 (ventana trasera), (CMxA) 1996-2000 (sedán) |
| Lancero | Evolution IV (CN9A) 1996.09-1998.02, AYC - opción para GSR |
| Lancero | Evolution V (CP9A) 1998.02-1999.01, AYC - opción para GSR99, resp. - LSD (RS/GSR99) |
| Lancero | Evolución VI (CP9A) 1999.01-2000.03, AYC para GSR2000 |
| Galant-Emeraude-Eterna | (E7xA... E8xA) 1992-1996 |
| Legnum galante | (ECxA, ECxW) 1996-2003 |
| Legnum galante | (EC5A/EC5W) VR-4 (AYC para todos) 1996-2002 |
| RVR | (N1xW/N2xW) 1991 - 1997.08 |
| RVR | (N6xW/N7xW) 1997.09 - 2003.01 |
| Carro/Grandis | (N3xAn/N4xAn) 1992.06 - 1997.07 |
| Carro/Grandis | (N8xW/N9xW) 1997.08 - 2002 |
| diamante sigma | (F2xA) (sedán) 1990,05-1994,11 |
| diamante | (F4xA) (sedán) 1994,12-2002,10 |
| GTO/3000 GT | (Z1xA) 1990.10-2000.09 |
| Airtrek / forastero | (CUxW) 2001.03-… |
[esconder]
VCU
Para descubrir...
El alejamiento gradual de los 4WD completos fue apoyado por todos los fabricantes de automóviles japoneses, y MMC no fue una excepción.
El esquema con la VCU (Unidad de acoplamiento viscoso) es similar al Toyota V-Flex II: no tiene un diferencial central, el momento se dirige a lo largo del eje cardán hacia atrás, donde se instala frente a la caja de cambios, actuando y conectando el vástago del cardán y el eje de entrada de la caja de cambios con un deslizamiento significativo de las ruedas delanteras. El resto del tiempo el coche sigue siendo de tracción delantera. Se instaló un diferencial LSD de fricción trasera opcional.
- Pros: simplicidad y bajo costo.
- Contras: comportamiento inadecuado durante la conducción activa, coeficiente de bloqueo insuficiente, baja velocidad de respuesta.
| Modelo | Modificaciones |
| lancer cedia | (CSxA, CSxW) 2000.05-… |
| espejismo dingo | (CQxA) 1999.01-2002.12 |
| Dión | (CRxW) 2000.01-… |
| eK Sport-Wagon-con clase | (H81W) 2001,09-... |
| eK activo | (xBA-H81W) 2004,05-… |
| Minica | (H12V/H15A) 1984-1988 |
| Minica | (H26A/H27A/H27V) 1990,02-1993,08 |
| Minica | (H36A/H37A) 1993,08-1998 |
| Minica | (H46A/H47A) 1998,08-... |
| Minica Toppo | (H27A/H27V) 1990,02-1993,08 |
| Minica Toppo | (H36A/H37V) 1993,08-1997,10 |
| ToppoBJ | (H46A/H47A) 1998,08-2003,08 |
| ToppoBJ ancho | (H48A) 1998,08-2001,06 |
| potro nuevo | (Z2xA) 2002.11-… |
| Colt más nuevo | (Z2xAn) 2004.10-… |
[esconder]
Selección múltiple
Para descubrir...
Por supuesto, el esquema ahora de moda con un eje trasero conectado por un embrague electromecánico, que corresponde, no se hizo a un lado.
 En el modo "2WD", la tracción se realiza solo en las ruedas delanteras. En el modo "4WD", en condiciones normales, las ruedas delanteras están involucradas, pero, dependiendo de las condiciones de conducción, la unidad de control puede redistribuir automáticamente el momento al eje trasero. En el modo "LOCK" (a baja velocidad), el embrague está completamente bloqueado, mientras que el momento se divide casi por igual entre los ejes.
En el modo "2WD", la tracción se realiza solo en las ruedas delanteras. En el modo "4WD", en condiciones normales, las ruedas delanteras están involucradas, pero, dependiendo de las condiciones de conducción, la unidad de control puede redistribuir automáticamente el momento al eje trasero. En el modo "LOCK" (a baja velocidad), el embrague está completamente bloqueado, mientras que el momento se divide casi por igual entre los ejes.
- Ventajas: la conexión de las ruedas traseras se realiza "más razonablemente" que en el esquema VCU; es posible habilitar la tracción total.
- Contras: capacidad de supervivencia no muy alta; insuficiencia de trabajo en el modo "4WD".
[esconder]
ACD+AYC
Para descubrir...
Debe admitirse que el sistema de tracción total para pasajeros más avanzado del mundo fue desarrollado por MMC, para diferentes generaciones de Lancer Evolution.
Hay un diferencial entre ejes, bloqueado automáticamente por un embrague hidromecánico controlado electrónicamente (ACD), y el conductor puede elegir la "rigidez" de su bloqueo de forma independiente.
El segundo componente más importante es el diferencial trasero activo (AYC). Le permite ajustar el par transmitido desde el motor a las ruedas traseras izquierda y derecha, dependiendo de la superficie, la posición del volante y el pedal del acelerador, la velocidad de las ruedas y la velocidad del vehículo. En un giro, el mayor momento se suministra a la rueda exterior, lo que crea un momento de giro adicional. En superficies resbaladizas o irregulares, AYC reemplaza el diferencial autoblocante (la mayor parte del par va a la rueda con el mejor agarre). A partir de Evolution VIII, se utiliza un diferencial Super-AYC mejorado, que difiere del esquema de control de bisel y retroalimentación.
- Pros: capacidad de campo a través, capacidad de control, máxima "inteligencia".
- Contras: la complejidad y el costo del diseño.
[esconder]
Tiempo parcial (EasySelect)
Para descubrir...
 Uno de los tipos más simples de 4WD (en algunos modelos se llama EasySelect), con un eje delantero conectado, sin diferencial central, se usa en los modelos originales de tracción trasera.
Uno de los tipos más simples de 4WD (en algunos modelos se llama EasySelect), con un eje delantero conectado, sin diferencial central, se usa en los modelos originales de tracción trasera.
El esquema prevé el control directo de la caja de transferencia mediante una palanca. Inicialmente, los ejes de transmisión delanteros estaban conectados a las ruedas mediante ruedas libres mecánicas manuales o automáticas ("cubos"). En los modelos más recientes, para facilitar el proceso de conexión del eje delantero, se utiliza el sistema ADD que, mediante un actuador neumático, desconecta uno de los semiejes delanteros.
- Pros: la relativa simplicidad del diseño, la presencia de un cambio descendente.
- Contras: el modo "4WD" solo se puede usar en superficies resbaladizas (hielo, nieve, carreteras mojadas) y por un tiempo limitado; de lo contrario, aumenta el ruido, aumenta el consumo de combustible, se deteriora el manejo, se desgastan los neumáticos y los elementos de transmisión. Los concentradores "manuales" son confiables, pero no muy convenientes de usar, y los automáticos están lejos de ser ideales en términos de capacidad de supervivencia.
| Modelo | Modificaciones |
| Montero III | (V64W/V74W) 1999.06-… (opc. - trasera híbrida LSD / DiffLock) |
| Challenger/Pajero Sport/Montero Sport | (K9xW) 1996.05-… (opc. - LSD trasero híbrido) |
| L200 / Strada | (K7xT) 1996.12-… (opc. - fricción trasera LSD / DiffLock) |
| Equipo espacial Delica | (PDxW/PExW/PFxW) 1994.03-… (opc. - LSD de fricción trasera / LSD híbrido) |
| Montero II | (V2xW/V4xW) 1990.10-1999.11 (opcional - LSD de fricción trasera / LSD híbrido / DiffLock) |
| L200/Strada | (K3xT) 1991.03-1997.05 (opcional - fricción trasera LSD) |
| Vagón estrella Delica/L300 | 1987.09-1999.06 (P2xW/P3xW/P4xW) (opcional - fricción trasera LSD) |
| Montero Mini | (H56A/H58A) 1996,06-... |
| Montero júnior | (H57A) 1995,10-1998,04 |
| Caja de la ciudad | (U62W/U62V/U62T/U64W) 1998.11-… (opc. - fricción trasera LSD) |
| Caja de ciudad ancha | (U66W) 1999.04-2001.06 (opcional - fricción trasera LSD) |
Parte del Pajero III recibió como opción MATC (Mitsubishi Active Traction Control), un sistema de control de tracción dinámico que funciona como un sistema de control de tracción en carreteras pavimentadas e imita el bloqueo de los diferenciales del eje transversal delantero y trasero fuera de la carretera, reduciendo la velocidad. la rueda que patina. En el modo 4H, la capacidad todoterreno mejora notablemente sin necesidad de un bloqueo de diferencial central. Este sistema analiza las condiciones de conducción a través de sensores que miden la velocidad, el par de la carrocería del vehículo y la aceleración lateral, así como el ángulo de giro y la aceleración longitudinal. Contras: menos eficiencia en comparación con DiffLock, es posible un desgaste desigual de las pastillas, cuando el ABS entra en modo de emergencia, el bloqueo desaparece.
También con la transmisión Super Select, la llamada. ABS multimodo. Los frenos delantero y trasero están controlados por tres canales independientes, lo que le permite aplicar exactamente la fuerza de frenado adecuada a cada rueda. Sin embargo, cuando el bloqueo del diferencial central está activado, la diferente tracción de las ruedas y, en consecuencia, las diferentes fuerzas de frenado pueden hacer que la transmisión se "gire" y que el vehículo vibre. Mitsubishi ha resuelto este problema por primera vez en el mundo al crear un ABS multimodo, que también funciona en el modo de diferencial central bloqueado.
El sistema AWC tiene tres modos controlados por la unidad electrónica mediante los comandos de la perilla en la consola central:
- 2WD(denominado 4WD ECO en algunos mercados): formalmente tracción delantera, este modo implica transferir una pequeña cantidad de torque a las ruedas traseras para reducir el ruido del eje trasero. Según algunos informes, en este modo, también puede ocurrir una transferencia de par al eje trasero con un deslizamiento notable.
- 4x4 automático: dosifica hasta un 40% del par a las ruedas traseras, dependiendo de la posición del pedal del acelerador (cuanto más se pisa, más se cierra el embrague), la diferencia de velocidades de las ruedas delanteras y traseras (se cierra al patinar y abre cuando no está) y la velocidad del vehículo. Cuando se pisa a fondo el acelerador, se devuelve hasta un 40% del empuje, a una velocidad superior a 64 km/h, la transferencia de par se reduce al 25%. A velocidad de crucero constante, hasta el 15 % del par se envía a las ruedas traseras y, a baja velocidad en curvas cerradas, se reduce el cierre del acoplamiento, lo que garantiza una curva suave.
- Bloqueo 4WD: el embrague se cierra sin esperar a que patine, y a baja velocidad envía hasta el 60% del momento a las ruedas traseras (cuando el pedal del acelerador está pisado a fondo en una carretera seca), y a alta velocidad el momento se distribuye por igual entre las ruedas traseras. ejes En curvas cerradas, el par en el eje trasero en este modo tampoco se reduce tanto como en 4WD Auto.
En todos los modos, la electrónica continúa cambiando el grado de cierre del embrague, sin embargo, estructuralmente no puede cerrarlo por completo, es decir, siempre hay deslizamiento y generación de calor en el embrague. El papel de los bloqueos entre ruedas se asigna al sistema de estabilización, que ralentiza el deslizamiento de las ruedas.
| Modo de conducción | camino seco | camino cubierto de nieve | ||
| ruedas | parte delantera | trasero | parte delantera | trasero |
| Aceleración | 69% | 31% | 50% | 50% |
| a 30 km/h | a 15 km/h | |||
| 85% | 15% | 64% | 36% | |
| a 80 km/h | a 40 km/h | |||
| Velocidad constante | 84% | 16% | 74% | 26% |
| a 80 km/h | a 40 km/h | |||
Debido al sobrecalentamiento constante del embrague y su incapacidad para soportar una carga notable durante mucho tiempo, este tipo de accionamiento solo puede considerarse completo con un estiramiento muy grande y solo es adecuado para mejorar la capacidad de control en superficies duras. Se utiliza, además de Outlander XL, ASX, también en el último Lancer.
Para descubrir...

Componentes y funciones:
| Componente | Función |
| ECU del motor | |
| ABS/ASC-ECU | Transmite a través de señales CAN requeridas por 4WD-ECU:
|
| Interruptor de modo de conducción 2WD/4WD/LOCK | Traduce la posición del interruptor de modo de conducción (2WD/4WD/LOCK) para 4WD-ECU. |
| ETACS-ECU |
|
| 4WD-ECU | El sistema evalúa las condiciones de la carretera y, basándose en las señales de todas las ECU y el interruptor de modo de conducción, dirige la cantidad necesaria de par a las ruedas traseras. Cálculo de la fuerza de compresión óptima del embrague según las condiciones de conducción y el modo de conducción actual según las señales de todas las ECU y el interruptor de modo de conducción. |
| Gestión del indicador de funcionamiento 4WD y el indicador de bloqueo en el cuadro de instrumentos. | |
| Gestión de funciones de autodiagnóstico y tolerancia a fallos. | |
| Control de funciones de diagnóstico (compatible con MUT-III). | |
| Control electrónico del embrague | 4WD-ECU transmite el par correspondiente a las condiciones actuales a las ruedas traseras a través de un embrague. |
Indicador de modo de conducción
| Un indicador incorporado en el grupo de instrumentos indica el modo de cambio de modo de manejo seleccionado (no se muestra en el modo 2WD).
|
| Conector de diagnóstico | Salida de códigos de diagnóstico y comunicación con MUT-III. |
Configuración del sistema:

Esquema de control:

Diagrama de cableado de control electrónico AWC:

Diseño mecanico:


El control electrónico del embrague consta de una carcasa delantera (carcasa delantera), embrague principal (embrague principal), mecanismo de leva principal (leva principal), bola (bola), mecanismo de leva controlado (leva piloto), armadura (armadura), embrague controlado (piloto) embrague), carcasa trasera (carcasa trasera), bobina magnética (bobina magnética) y eje (eje).
- La carcasa delantera está conectada al eje cardán y gira con el eje.
- Delante de la carcasa, los embragues principal (embrague principal) y controlado (embrague piloto) están montados en el eje (eje), mientras que el embrague controlado (embrague piloto) se instala a través del tope de leva (leva piloto).
[esconder]
Operación del sistema
Para descubrir...
Embrague desacoplado (2WD). El momento desde la caja de transferencia a través del eje cardán (eje de la hélice) se transmite al frente de la carcasa (carcasa delantera). Porque la bobina electromagnética (bobina magnética) está desenergizada, el embrague piloto y el embrague principal no están acoplados y la fuerza impulsora no se transmite al eje (eje) y al engranaje impulsor (piñón impulsor) del diferencial trasero.

Embrague acoplado (4WD). El momento desde la caja de transferencia a través del eje cardán (eje de la hélice) se transmite al frente de la carcasa (carcasa delantera). Porque se activa la bobina electromagnética (bobina magnética), se crea un campo magnético entre la carcasa trasera (carcasa trasera), la fricción controlada (embrague piloto) y el inducido (inducido). El campo magnético actúa sobre el embrague y los accesorios controlados y enciende el embrague. Cuando se acopla el embrague controlado, el par se transmite al mecanismo de leva controlado (leva piloto). En respuesta a esta fuerza, la bola (bola) en el mecanismo de leva (leva principal) (leva piloto) se retrae y genera un impulso de traslación. Este impulso actúa sobre el embrague principal y el par se transmite a las ruedas traseras a través del eje y el engranaje del diferencial trasero.
![]()
El momento transmitido a las ruedas traseras se controla cambiando la corriente suministrada al devanado del embrague.
[esconder]
[esconder]
S-AWC y Twin Motor 4WD
Para descubrir...
Junto con la actualización del Outlander XL (ahora es Outlander Sport) y la pérdida de su diseño agresivo por parte de Akinori Nakanishi, la unidad AWC defectuosa en la versión superior del modelo fue reemplazada por el llamado Super-AWC, o S- AWC. De hecho, esta es una unidad ACD + AYC modificada, discutida anteriormente, donde el diferencial central ACD se reemplaza con un diferencial LSD activo electromagnético AFD y se complementa con asistentes electrónicos (sistema de dirección EPS para suavizar las sacudidas de la operación AFD, ABS y ESP activos). sistemas). El S-AWC se basa en el principio de control vectorial de empuje, cuando el control automático del diferencial delantero, el embrague del eje trasero, los frenos y la dirección asistida distribuye los momentos transmitidos a todas las ruedas. El factor clave es que el sistema tiene en cuenta las velocidades angulares.

El sistema S-AWC tiene tres configuraciones (una de las cuales, la original ACD + AYC, se considera como referencia):

El diferencial central AFD LSD utilizado en la transmisión S-AWC es básicamente un embrague electromagnético y, al igual que el AYC, puede controlar los pares entregados a las ruedas delanteras. El mecanismo de bloqueo es producido por la empresa inglesa GKN; también suministra el embrague central. Para comprimir los embragues, la unidad de control de tracción en las cuatro ruedas suministra corriente al devanado del electroimán, y si hay una diferencia en las velocidades de rotación de las ruedas delanteras, los dos discos del mecanismo de presión de bola giran entre sí, creando una fuerza axial que comprime los embragues (al igual que en la transmisión AWC). La electrónica cambia constantemente el grado de bloqueo del diferencial, pero no es posible una conexión rígida entre los semiejes. Aquellos. en condiciones difíciles, AYC en el eje trasero no hará el clima, porque el momento adecuado no lo golpeará y, en general, el eje trasero puede apagarse debido al sobrecalentamiento en cualquier momento.

La transmisión S-AWC tiene cuatro modos de funcionamiento:
- AWC ECO suministra par solo al eje delantero ("para ahorrar combustible") y conecta el eje trasero solo cuando patina;
- NORMAL distribuye de manera óptima el par a todas las ruedas de acuerdo con las condiciones de la carretera;
- NIEVE diseñado para nieve, hielo y otras superficies resbaladizas;
- CERRAR cierra todos los diferenciales, brindando el mayor potencial todoterreno.
Además, un caso aparte es la opción en la que los ejes delantero y trasero no están interconectados en absoluto y cada uno es impulsado de forma independiente por su propio motor eléctrico:

Aquí también hay intriga, porque. Según varios datos del mismo Mitsubishi, en los ejes se pueden utilizar tanto diferenciales AYC como diferenciales abiertos convencionales. O, por ejemplo, en el eje delantero, abierto, y en la parte trasera, AYC.
Twin Motors 4WD tiene solo dos modos: "NORMAL" para condiciones normales y "4WD LOCK" para condiciones difíciles. Al mismo tiempo, digamos, las pruebas de revisión automática muestran que la transmisión Twin Motor 4WD no puede superar ninguna condición difícil. De la palabra "absolutamente":
Primero fuimos a donde es costumbre usar la tracción total en invierno, en la nieve. Comenzó con un híbrido y... terminó de inmediato: ¡PHEV se atascó al instante! ... El algoritmo de la central eléctrica es un misterio. Pisa el acelerador y solo gira el eje delantero. Y la próxima vez que las ruedas traseras comiencen a patinar, pero las ruedas delanteras están en su lugar. Sueltas el pedal derecho, ¡y la rotación continúa durante algún tiempo!

Mitsubishi ha estado estudiando el uso de sistemas de tracción total en la práctica para determinar qué solución tecnológica será la más adecuada para este tipo de automóvil y la más conveniente para los futuros propietarios de este crossover compacto.
Los ingenieros se alejaron de la solución tradicional: el uso de una transmisión automática con una conexión de tracción total bajo demanda. Dichos sistemas se basan en el hecho de que cuando las ruedas delanteras patinan, parte del par se redistribuye a las ruedas traseras. Los especialistas de Mitsubishi entendieron que el consumidor estaba más interesado en los sistemas que reducen activamente la probabilidad de que las ruedas patinen.
El Outlander anterior tenía tracción permanente en las cuatro ruedas con un diferencial central de bloqueo viscoso, una división de transmisión de 50:50 que brindaba un rendimiento excelente en condiciones climáticas adversas, pero el consumo de combustible era alto para el uso diario. Mitsubishi se propuso dar al nuevo Outlander el mismo o mejor desempeño en uso pesado, con cambios mínimos en el consumo de combustible.
Así apareció el sistema de transmisión de tracción total MITSUBISHI AWC (All Wheel Control). Del inglés, All Wheel Control se traduce literalmente como control de todas las ruedas. Este sistema proporciona al conductor la posibilidad de elegir el tipo de unidad. El sistema es esencialmente una combinación de una transmisión especial de tracción total Multi-Select 4WD y distribución electrónica de par, además de este moderno control de tracción y control de estabilidad. Gracias al sistema AWC se consigue una excelente tracción de las ruedas del coche con la carretera y un excelente manejo en tramos resbaladizos de la pista. Para garantizar un rendimiento de transmisión óptimo, basta con seleccionar uno de los tres modos presentados en la consola central "2WD", "4WD" o "Lock".
| Modo de conducción | Descripción | ventajas |
| 2WD | Envía torque a las ruedas delanteras | Mejor economía de combustible, reducción del ruido del vehículo, mejor manejo. Esto también conserva la posibilidad de que la unidad de control dirija el par al eje trasero para reducir su ruido. |
| 4x4 automático | Dosifica la dirección del par a las ruedas traseras en función de la posición del pedal del acelerador y la diferencia de velocidades de las ruedas delanteras y traseras | Distribución óptima del par para determinadas condiciones de conducción. La distribución del par entre los ejes delantero y trasero la realiza automáticamente la unidad electrónica en función de los parámetros de conducción del vehículo (velocidad de las ruedas delanteras y traseras, posición del pedal del acelerador y velocidad del vehículo). Se prefiere el modo de tracción en 2 ruedas. |
| Bloqueo 4WD | Se envía 1,5 veces más par a las ruedas traseras que en el modo 4WD | Aumenta la tracción, proporciona estabilidad a alta velocidad y mejor flotación en superficies irregulares o resbaladizas. El modo LOCK es similar al modo 4WD, pero con una ley modificada de distribución de par entre los ejes. A baja velocidad, se suministra 1,5 veces más par al eje trasero y a alta velocidad, el par se distribuye por igual entre los ejes. |
Dos modos de conducción
4x4 automático
Cuando se selecciona "4WD Auto", el sistema de tracción en las cuatro ruedas 4WD del Outlander distribuye constantemente una parte del torque a las ruedas traseras, aumentando automáticamente esta relación cuando se presiona el pedal del acelerador. El embrague dirige hasta el 40 % de la tracción a las ruedas traseras con el acelerador a fondo y la reduce hasta en un 25 % a velocidades superiores a 40 mph. En movimiento constante a velocidad de crucero, hasta el 15 % del par disponible se envía a las ruedas traseras. A bajas velocidades en curvas cerradas, la fuerza se reduce, proporcionando curvas suaves.
Bloqueo 4WD
Para conducir en condiciones particularmente difíciles, como la nieve, el conductor puede seleccionar el modo "4WD Lock". Cuando el bloqueo está activado, el sistema aún redistribuye automáticamente la torsión entre las ruedas delanteras y traseras, pero la mayor parte de la torsión se transfiere a las ruedas traseras. Por ejemplo, al acelerar en una colina, el embrague transferirá inmediatamente la mayor parte del par a las ruedas traseras para proporcionar tracción a las cuatro ruedas. Por el contrario, la tracción automática en las cuatro ruedas "bajo demanda" primero "esperará" a que las ruedas delanteras patinen, y solo entonces transferirá el par a las ruedas traseras, lo que puede interferir con la aceleración.
En carreteras secas, el modo 4WD Lock proporciona una aceleración eficiente. Se envía más torque a las ruedas traseras para obtener más potencia, un mejor manejo al acelerar en caminos nevados o poco firmes y una mejor estabilidad a altas velocidades. La proporción de par en las ruedas traseras aumenta en un 50 % en comparación con el modo 4WD, lo que significa que hasta el 60 % del par disponible se dirige a las ruedas traseras cuando se pisa a fondo el pedal del acelerador en carreteras secas. En el modo 4WD Lock, en curvas cerradas, la torsión de la rueda trasera no se reduce en la misma medida que cuando se conduce en el modo 4WD Auto.
La relación de torque a las ruedas delanteras / traseras en modo 4WD tiene los siguientes valores:
| Modo de conducción | camino seco | camino cubierto de nieve | ||
| ruedas | parte delantera | trasero | parte delantera | trasero |
| Aceleración | 69% | 31% | 50% | 50% |
| a 30 km/h | a 30 km/h | a 15 km/h | a 15 km/h | |
| 85% | 15% | 64% | 36% | |
| a 80 km/h | a 80 km/h | a 40 km/h | a 40 km/h | |
| Velocidad constante | 84% | 16% | 74% | 26% |
| a 80 km/h | a 80 km/h | a 40 km/h | a 40 km/h | |
esquema estructural

Componentes y funciones del sistema
|
Nombre del componente |
Marcha |
|
|
|
Transmite las siguientes señales a la ECU de 4WD requerida a través de CAN.
|
|
|
Interruptor de modo de conducción 2WD/4WD/LOCK |
Transmite la señal de posición del interruptor del modo de conducción para la ECU de 4WD. |
|
|
|
El sistema evalúa las condiciones de la carretera y, en función de las señales de cada ECU, el interruptor de modo de conducción dirige la cantidad necesaria de par a las ruedas traseras. Cálculo de la fuerza límite diferencial óptima a juzgar por la condición del automóvil y el modo de manejo actual basado en las señales de cada ECU, el interruptor de modo de manejo controla el valor actual entregado al enlace de control electrónico. |
|
|
Gestión del rendimiento (indicador de trabajo 4WD e indicador de bloqueo) en el grupo de instrumentos. |
|
|
Controla la función de autodiagnóstico y la función de conmutación por error. |
|
|
Control de funciones de diagnóstico (compatible con MUT-III). |
|
|
Control electrónico del embrague |
4WD-ECU envía el par correspondiente al valor actual a las ruedas traseras. |
|
Indicador de modo de conducción
|
Incrustado en el grupo de instrumentos indica el modo de cambio de modo de manejo seleccionado (no se muestra en el modo 2WD).
|
|
Conector de diagnóstico |
Muestra códigos de diagnóstico y establece comunicación con MUT-III. |
configuración del sistema

Esquema de control

Diagrama de cableado de control electrónico 4 WD

Diseño


El control electrónico del embrague consta de una carcasa delantera (carcasa delantera), embrague principal (embrague principal), mecanismo de leva principal (leva principal), bola (bola), mecanismo de leva controlado (leva piloto), armadura (armadura), embrague controlado (piloto) embrague), carcasa trasera (carcasa trasera), bobina magnética (bobina magnética) y eje (eje).
- La carcasa delantera está conectada al eje cardán y gira con el eje.
- Delante de la carcasa, el embrague principal (embrague principal) y el embrague controlado (embrague piloto) están montados en el eje (eje) (el embrague controlado (embrague piloto) se instala a través del tope de leva (leva piloto)).
- El eje engrana a través de los dientes con el piñón de mando del diferencial trasero.
Marcha
Embrague desacoplado (2WD: bobina magnética desenergizada).

La fuerza motriz de la caja de transferencia a través del eje de la hélice se transmite a la carcasa delantera (carcasa delantera). Debido a que la bobina magnética (bobina magnética) está desenergizada, el embrague controlado (embrague piloto) y el embrague principal (embrague principal) no están acoplados y la fuerza impulsora no se transmite al eje (eje) y la transmisión por engranajes (accionamiento). piñón) del diferencial trasero.
El embrague funciona (4WD: bobinas magnéticas energizadas).

La fuerza motriz de la caja de transferencia a través del eje de la hélice se transmite a la carcasa delantera (carcasa delantera). Cuando se energiza la bobina magnética, se crea un campo magnético entre la carcasa trasera, controlada por el embrague piloto, y la armadura. El campo magnético actúa sobre el embrague controlado (embrague piloto) y la armadura (armadura) incluye el embrague (embrague piloto). Cuando se acopla el embrague controlado (embrague piloto), la fuerza motriz se transfiere al mecanismo de leva controlado (leva piloto). En respuesta a esta fuerza, la bola (bola) en el mecanismo de leva (leva principal) (leva piloto) se retrae y genera un impulso de traslación. Este impulso actúa sobre el embrague principal (main clutch) y el par se transmite a las ruedas traseras a través del eje y del engranaje diferencial trasero.
Al ajustar la corriente suministrada a la bobina magnética, la cantidad de fuerza motriz transmitida a las ruedas traseras se puede ajustar de 0 a 100%.



