![]() Ettevõtte toodetud pooljuhtkomponentide valik Texas Instruments draiveri IC-sid pakutakse laialdaselt igat tüüpi juhtimiseks elektrimootorid, mida täiustatuna kasutatakse üha enam mitmesugustes seadmetes. Ettevõte pakub lahendusi mitmesuguste voolude ja pingetega ajamite loomiseks, pakkudes usaldusväärset ja mugavat tööd. koguja,harjadeta ja samm-mootorid täieliku voolu-, pinge- ja temperatuurikaitsega.
Ettevõtte toodetud pooljuhtkomponentide valik Texas Instruments draiveri IC-sid pakutakse laialdaselt igat tüüpi juhtimiseks elektrimootorid, mida täiustatuna kasutatakse üha enam mitmesugustes seadmetes. Ettevõte pakub lahendusi mitmesuguste voolude ja pingetega ajamite loomiseks, pakkudes usaldusväärset ja mugavat tööd. koguja,harjadeta ja samm-mootorid täieliku voolu-, pinge- ja temperatuurikaitsega.
Elektrimootorid leiavad tänapäeva kõrgtehnoloogilises elustiilis kõige laiemat rakendust. Seda tüüpi elektromehaanilised ajamid on endiselt üks levinumaid ja nõudlikumaid. Erineva otstarbega elektrimootorid on iga tootmise üks põhikomponente, neid kasutatakse laialdaselt kontori- ja koduseadmetes, hoonete ja rajatiste seire- ja juhtimissüsteemides. Elektrimootoreid kasutatakse kaasaegses transpordis laialdaselt. Elektrisõidukite ja robotite elektrimootoreid ootab ees veelgi põnevam tulevik.
Tehnoloogia arenedes täiustatakse traditsioonilisi mootoreid ja need leiavad üha uusi rakendusi. Kaasaegsed ülitäpsed tööpingid ja robootika on mõeldamatud ilma intelligentsete juhtimissüsteemidega elektrimootoriteta. Maapinnal, õhus ja vee all on elektrimootorid endiselt laialdaselt nõutud elektrienergia muundurid mehaaniliseks energiaks.
Elektrimootorite tüübid, juhtimismeetodid ja tekkinud raskused
Esmakordselt 1834. aastal Vene teadlase Jacobi loodud elektrienergia muundurit pöörlevaks liikumiseks nimetati elektrimootoriks. Sellest ajast alates on seda tõsiselt täiustatud - ilmunud on palju uusi võimalusi, kuid selle loomisel kasutatud elektromagnetismi põhimõtted on endiselt kaasaegsete elektrimootorite kõigi modifikatsioonide aluseks.
Seda läbiva vooluga juht (joonis 1) loob enda ümber magnetvälja, mille intensiivsus (magnetinduktsioon) on mähise (N) kasutamise korral võrdeline keerdude arvuga ja seda läbiv vool (I), kus B on magnetvälja vektori induktsioon, K on magnetkonstant, N on pöörete arv, I on voolu tugevus.

Voolu suuna muutmine mõjutab ka juhi magnetvälja suunda.
Sel juhul mõjub Lorentzi jõud välisesse magnetvälja asetatud voolu juhtivale juhile, põhjustades selle pöörleva liikumise. Pöörlemissuunda saab hõlpsasti määrata magnetväljas voolu juhtiva juhi jaoks tuntud parema käe reegli abil (joonis 2). Magnetväljas juhile mõjuv jõud (F) võrdub juhis oleva voolutugevuse (I) ja välja magnetinduktsiooni vektori (B) ja juhi pikkuse (L) korrutisega. F = LIB.

Kollektorite mootorid
DC harjatud alalisvoolumootorid (Brushed DC või BDC, TI terminoloogias) on tänapäeval ühed levinumad elektromagnetilised pöörlemismehhanismid.
Püsimagnetitest kokkupandud staatori magnetväljas pöörleb mitme sektsiooniga rootor mähistega, mis on ühendatud paarikaupa ja vaheldumisi läbi kommuteeritud kollektorlamellide rootori teljel (joonis 3). Aktiveeritud poolide paari valimine toimub Lorentzi seaduse alusel vastavalt Gimleti reeglile. Vooluallikas on alati ühendatud mähistega, mille magnetvälja jooned on nihutatud staatori magnetvälja suhtes 90° lähedase nurga võrra.

Seda tüüpi elektrimootorid kasutavad sageli püsimagnetistaatorit. Need võimaldavad teil hõlpsalt reguleerida pöörlemiskiirust ega ole kallid.
Laialdaselt kasutatakse ka sarnast tüüpi 2-mähise elektrimootori varianti, kuid püsimagneti asemel staatorimähisega. Sellistel mudelitel on suur käivitusmoment ja need võivad töötada mitte ainult alalis-, vaid ka vahelduvvoolul. Seda tüüpi elektrimootoreid kasutatakse peaaegu kõikjal erinevates kodumasinates.
Selle BDC konstruktsiooni puudused hõlmavad harja-kollektori sõlme kulumist töö ajal. Lisaks täheldatakse üksikute rootorimähiste ümberlülitamisel tekkivate sädemete tõttu elektromagnetiliste häirete suurenenud taset, mis ei võimalda kasutada selliseid mootoreid plahvatusohtlikes keskkondades.
BDC mootorite eripäraks on ka rootori suurenenud kuumutamine, mille jahutamine on mootori konstruktsiooniomaduste tõttu raskendatud.
Kollektormootorite eelised:
- odav;
- lihtne juhtimissüsteem;
- Suure pöördemomendiga 2-mähisega kommutaatoriga mootorid, mis on võimelised töötama nii vahelduv- kui alalisvoolus.
Kollektormootorite töö omadused:
- harjad vajavad perioodilist hooldust, vähendavad mootori töökindlust;
- lülitusprotsessi käigus tekivad elektrilised sädemed ja elektromagnetilised häired;
- ülekuumenenud rootorist on raske soojust eemaldada.
Harjadeta mootorid
Mõnevõrra vähem levinud alalisvoolumootorite seas on harjadeta konstruktsioonid (BrushLess DC või BLDC), mis kasutavad staatori elektromagnetite vahel pöörlevate püsimagnetitega rootorit (joonis 4). Voolu lülitamine toimub siin elektrooniliselt. Staatori elektromagnetite mähiste ümberlülitamine paneb rootori magnetvälja järgima selle välja.
Rootori hetkeasendit juhitakse tavaliselt koodrite või Halli efekti anduri abil või kasutatakse tehnoloogiat, et mõõta mähiste vastu-EMF pinget ilma eraldi rootori asendiandurit (SensorLess) sel juhul kasutamata.
Staatori mähiste voolu lülitamine toimub elektrooniliste võtmete (ventiilide) abil. Seetõttu nimetatakse BLDC harjadeta mootoreid sageli "lülitatud mootoriteks". Mootori mähiste paari ühendamise jada toimub sõltuvalt rootori praegusest asendist.
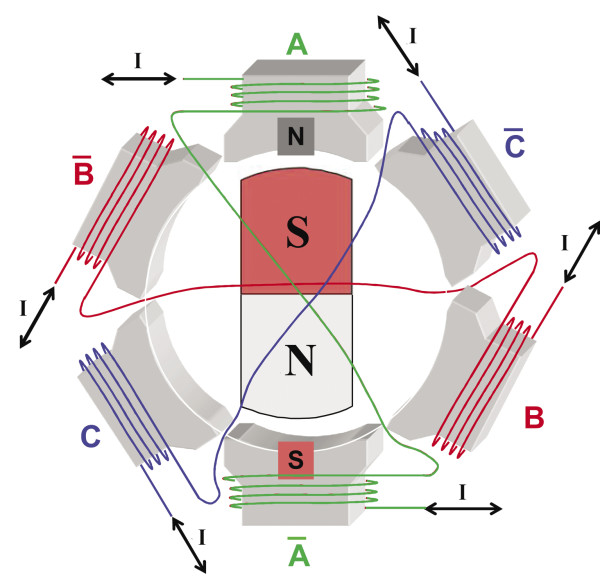
BLDC tööpõhimõte põhineb sellel, et kontroller lülitab staatori mähised nii, et staatori magnetvälja vektor nihkub alati 90° või -90° lähedase nurga võrra rootori magnetvälja vektori suhtes. Lülitamise ajal pöörlev magnetväli paneb püsimagnetitega rootori sellele järele liikuma.
Kolmefaasilise juhtsignaali kasutamisel on vooluallikaga alati ühendatud ainult kaks mähiste paari ja üks on lahti ühendatud. Selle tulemusena kasutatakse järjestikku kuue oleku kombinatsiooni (joonis 5).

Rootori asendiandurita elektrimootoreid iseloomustab tootmisprotsessi kõrgem valmistatavus ja madalam hind. See disain lihtsustab väliste ühendusklemmide tihendamist.
Hall-andureid saab BLDC-s kasutada kiiruse ja rootori asendi anduritena, mida iseloomustab madal hind, aga ka üsna madal eraldusvõime. Suurenenud eraldusvõime tagavad pöörlevad trafod (resolverid). Need on kallid ja nõuavad DAC-i kasutamist, kuna väljund on siinuskujuline. Optilistel anduritel on kõrge eraldusvõime, kuid väiksem töökindlus. Joonisel 6 on näidatud erinevat tüüpi andurite väljundsignaalid mootori rootori pöörlemise ajal.

BLDC mootorite eelised:
- kõrge efektiivsusega;
- harjade puudumine, pakkudes suuremat töökindlust, vähendades hoolduskulusid;
- voolu/pöördemomendi lineaarsus;
- lihtsustatud soojuse hajumine.
BLDC mootorite rakendusomadused:
- keerukam juhtimissüsteem koos tagasisidega rootori asendi kohta;
- pöördemomendi pulsatsioon.
Sammmootorid
Sammmootoreid (SM) kasutatakse laialdaselt automaatika- ja juhtimissüsteemides. Need on teist tüüpi harjadeta alalisvoolumootorid. Struktuurselt koosnevad samm-mootorid staatorist, millel paiknevad ergutusmähised, ja magnetmaterjalidest valmistatud rootorist. Magnetrootoriga samm-mootorid võimaldavad suuremat pöördemomenti ja pingevaba mähistega rootori jäiga fikseerimist.
Pöörlemisprotsessis liigub SM-rootor staatori mähistele rakendatavate jõuimpulsside juhtimisel astmeliselt. Sammmootoreid on mugav kasutada start-stopp režiimis töötavate masinate ja mehhanismide ajamites. Nende liikumisulatuse määrab teatud elektriimpulsside jada. Sellised mootorid on ülitäpsed, ei vaja andureid ja tagasisideahelaid. Rootori pöördenurk sõltub rakendatud juhtimpulsside arvust. Positsioneerimistäpsus (astme suurus) sõltub mootori konstruktsiooniomadustest, mähise ühendusskeemist ja neile rakendatavate juhtimpulsside järjestusest.
Sõltuvalt mähiste ühendusskeemi konfiguratsioonist jagatakse samm-mootorid bipolaarseteks ja unipolaarseteks. Bipolaarsel mootoril on mõlemas faasis üks mähis mõlema staatori pooluse jaoks, mida juht peab magnetvälja suuna muutmiseks ümber pöörama. Bipolaarsel mootoril on kaks mähist ja vastavalt neli väljundit. Sellise samm-mootori juhtimiseks on vaja silladraivi või 2-pooluselise toiteallikaga poolsildahel. Bipolaarse juhtimisega töötab kaks mähist korraga ja pöördemoment on umbes 40% suurem. Joonisel 7 on näidatud juhtsignaalide jada bipolaarse samm-mootori pöörlemise ajal.

Unipolaarne mootor kasutab igas faasis ühte keskotsaga mähist ja võimaldab lihtsamat juhtimisskeemi ühe võtmega iga nelja poolmähise jaoks.
Nelja mähisega astmemootoreid saab kasutada nii bipolaarses kui ka unipolaarses konfiguratsioonis.
Kui vool liigub läbi ühe mähise, kipub rootor asendit muutma, nii et rootori ja staatori vastaspoolused asetsevad üksteise vastu. Rootori pidevaks pöörlemiseks lülitatakse mähised vaheldumisi.
Praktikas kasutatakse nelja staatorimähise toiteallikana erinevaid viise. Kõige sagedamini kasutatakse paarisühendusi täis- või poolesammulise tööga. Täissammulises režiimis võib kahe pooluse kahe pooluse lülitatavas magnetväljas pöörlev kahepooluseline rootor võtta neli asendit (joonis 8).

Topeltpositsioneerimistäpsuse ja kaheksa asendi saavutamiseks on võimalik poolsammuline toimimine (joonis 9). Selle rakendamiseks lisatakse vaheetapp kõigi nelja mähise samaaegse toitega.

Mikrosammu režiim võimaldab oluliselt suurendada vahepositsioonide arvu ja positsioneerimise täpsust. Mikrosammu idee seisneb selles, et juhtimpulsside asemel antakse samm-mootori mähistele pidev signaal, mis meenutab kujult astmelist sinusoidi (joonis 10). Täis samm on sel juhul jagatud väikesteks mikrosammudeks ja pöörlemine muutub sujuvamaks. Microstep režiim võimaldab teil saada kõige täpsema positsioneerimise. Lisaks väheneb selles režiimis samm-mootoritele omane korpuse vibratsioon oluliselt.

Sammmootorite eelised:
- madal hind pöörlemiskiiruse ja positsioneerimise reguleerimise ahelate puudumise tõttu;
- kõrge positsioneerimise täpsus;
- lai pöörlemiskiiruste valik;
- lihtne juhtimisliides digitaalsete kontrolleritega;
- väga kõrge töökindlus;
- hea hoidmise hetk.
Sammmootorite kasutamise omadused:
- SD on omane resonantsi nähtusele;
- tagasiside puudumise tõttu on võimalik asendikontrolli kadumine;
- võimsustarve ei vähene ka koormuseta sõites;
- raske töötada väga suurel kiirusel;
- madal erivõimsus;
- üsna keeruline juhtimisskeem.
Tavapärased mootorijuhtimislahendused
Kaasaegne täpne alalisvoolumootori juhtimissüsteem sisaldab andmetöötluseks mõeldud mikrokontrollerit ja mootori mähiste võimsuse juhtimisseadet, mida sageli nimetatakse draiveriks. Draiver sisaldab loogikalülitust kodeeritud sõnumite teisendamiseks digitaalseteks juhtsignaalideks, millest moodustuvad Gate Driver plokis analoogsignaalid, et juhtida väljatransistoridel (FET) põhinevaid toitelüliteid. FET-id saab lisada draiverisse või paigutada eraldi plokki. Lisaks sisaldab draiver toiteahelate kaitseahelaid ja tagasisideahelaid mootori töö juhtimiseks.
Joonisel 11 on näidatud integreeritud ja eeldraiveri plokkskeemi valikud. Igal lahendusel on oma eelised ja omadused. Pre-Driveril on oluliselt alandatud temperatuurirežiim, mis võimaldab valida väliseid toitelüliteid vastavalt ühendatud mootori võimsusele. Täielik integreeritud draiver võimaldab kompaktsemaid juhtimissüsteeme, minimeerib väliseid ühendusi, kuid muudab temperatuuri reguleerimise palju keerulisemaks.

Nii et integreeritud TI draiveri puhul võib plaadi üksikute elementide maksimaalne töötemperatuur ulatuda 193°C-ni ja eeldraiveri puhul ei ületa see näitaja 37°C.

Üks levinumaid mootorimähiste lülitamise ahelaid on "H" tüüpi sild. Skeemi nimi on seotud ühenduse konfiguratsiooniga, mis sarnaneb tähega “H”. Selle elektroonilise vooluringiga on lihtne muuta koormuse voolu suunda ja vastavalt ka rootori pöörlemissuunda. Sillatransistoride kaudu mähistele rakendatav pinge võib olla nii konstantne kui ka PWM-i abil moduleeritud. H-sild on mõeldud eelkõige mootori toiteallika polaarsuse muutmiseks – tagurpidi (joonis 12), kuid võimaldab ka pöörlemist aeglustada, lühistades mähise juhtmeid (joonis 13).

Silla jõuelementide, mida tänapäeval sageli kasutatakse isoleeritud väravaga väljatransistoridena, kõige olulisem omadus on transistori allika ja äravoolu vahelise avatud kanali takistusväärtus - RDSON. RDSON-väärtus määrab suuresti ploki termilise jõudluse ja võimsuskadu. Temperatuuri tõustes suureneb ka RDSON ning mähiste vool ja pinge vähenevad.
PWM-juhtsignaalide kasutamine vähendab pöördemomendi pulsatsiooni ja tagab mootori rootori sujuvama pöörlemise. Ideaalis peaks PWM-i sagedus olema üle 20 kHz, et vältida akustilist müra. Kuid sageduse kasvades suurenevad sillatransistoride kaod lülitusprotsessi ajal.
Mähiste kujul esineva koormuse induktiivsete omaduste tõttu ei ühti selles oleva voolu kuju rakendatud PWM-pinge kujuga. Pärast pingeimpulsi rakendamist suureneb vool järk-järgult ja pauside ajal kaob vool järk-järgult, kuna mähistes tekib tagasi-EMF. Voolugraafiku kõvera kalle, pulsatsiooni amplituud ja sagedus mõjutavad mootori jõudlust (pöördemomendi pulsatsioon, müra, võimsus jne).
Tagasi-EMF-efektist ergastatud voolu kiirendatud sumbumiseks elektrimootorite mähistes kasutatakse dioode pöördühenduses, manööverdades transistoride äravooluallika üleminekuid või lühistatakse mähised läbi äravooluallika üleminekute. kaks transistorit, mis on samaaegselt ühendatud silla erinevates harudes. Joonisel 13 on kujutatud silla kolm olekut: töötav, kiire aeglustumine (Fast Decay) ja aeglane aeglustumine (Slow Decay).
Ja kõige tõhusam on kombineeritud režiim (Mixed Decay), kus tööimpulsside vahelises pausis töötavad kõigepealt transistoride äravooluallikat manööverdavad dioodid ja seejärel lülituvad sisse silla alumises õlgades olevad transistorid. .
TI mootorijuhtimislahendused
TI pooljuhtkomponentide hulgas on lai valik erinevaid draivereid alalisvoolumootorite juhtimiseks. Kõik need nõuavad minimaalselt väliseid komponente, pakuvad kompaktseid lahendusi mootori juhtimiseks kuni 60 V, suurendavad töökindlust ning tagavad mootori ajamisüsteemide kiire ja lihtsa projekteerimise.
Draiveritesse sisseehitatud intelligentsed funktsioonid nõuavad minimaalset välise juhtimismikrokontrolleri (MCU) tuge, pakuvad täiustatud mähiste ümberlülitusvõimalusi, toetavad väliseid andureid ja digitaalseid juhtkontuure. Kaitsefunktsioonide kompleks sisaldab toitepinge piiramist, kaitset liigvoolu ja lühise, alapinge ja töötemperatuuri tõusu eest.
Kogu TI draiverite valik on jagatud kolme sektsiooni: samm-, harjatud ja harjadeta alalisvoolumootorid. Igas neist ettevõtte veebisaidil on mugav valikusüsteem mitmete parameetrite jaoks. Erinevat tüüpi mootoritega kasutamiseks on loodud eraldi draiverid.
TI samm-mootori draiverid
Suur osa TI mootorijuhtimislahendustest sisaldab samm-mootori draivereid (Joonis 14), mis on saadaval nii sisseehitatud FET-põhiste toitelülititega kui ka eeldraiveritena, mis pakuvad kasutajale vajalike toitelülitite valikut. Kokku on ettevõtte mudelivalikus enam kui 35 samm-mootori draiverit.

TI pakub laia valikut tipptasemel liikumisjuhtimis- ja täpseid positsioneerimislahendusi, kasutades mikrosammulisi juhtimisahelaid, mis tagavad mootoritele sujuva liikumise laias pinge- ja vooluvahemikus.
Eraldi draiverid, kasutades ühte juhtkontrollerit, võimaldavad juhtida kahte mootorit korraga, omades selleks neli sisseehitatud FET-põhist silda. On sisseehitatud FET-idega draivereid, näiteks DRV8834, mida saab ühendada samm-mootori kahe mähise juhtimiseks või kasutada samu kontakte kahe alalisvoolumootori juhtimiseks (joonis 15).

Rootori sujuvamaks liikumiseks samm-mootorite draiverites kasutatakse kohandatavat mehhanismi vooluimpulsside silumiseks (aeglane, kiire, segatud lagunemise režiimid). Mikrosammu arvutamise süsteem võib olla järgmist tüüpi:
- draiverisse sisseehitatud;
- kasutades välist tugisignaali.
Ei vaja microstepping-draiverite jaoks välist kontrollerit , ja . Siin arvutatakse liikumise samm ja mähise ümberlülitusalgoritm draiverisse sisseehitatud vooluringi järgi.
TI draiverid BDC jaoks
Juhtimiseks - kollektori alalisvoolumootorid - on ette nähtud spetsiaalne draiverite perekond, mille mitmed esindajad on näidatud joonisel 16. Need pakuvad täielikku kaitset ülepinge ja voolu, lühise ja ülekuumenemise eest. Tänu oma juhtliidese võimalustele tagavad need draiverid mootori lihtsa ja tõhusa kasutamise. Kasutajad saavad ühe kiibi abil juhtida ühte või mitut mootorit tööpingega 1,8 ... 60 V.

Pere draiverid on saadaval nii integreeritud toitenuppudega kui ka väljalaskeeelsete draiveritena. Need nõuavad minimaalselt lisakomponente, pakuvad kompaktseid lahendusi, vähendavad arendusaega ja võimaldavad uusi tooteid kiiremini turule tuua.
Puhkerežiim minimeerib energiatarbimist tühikäigul ja tagab kiirema aktiveerimise mootori käivitamisel. Kiiruse reguleerimiseks saab kasutada väliseid PWM-signaale või PHASE/ENABLE signaale, et valida pöörlemissuund ja lülitada sisse väljundsilla lülitid.
Omades nelja väljundsilda, saab draiver SPI-juhtliidese abil juhtida kahte stepperit või ühte stepperit ja kahte BDC-d või nelja BDC-d.
Joonisel 17 on kujutatud ühe kollektori mootori juhtimiseks mõeldud lihtsa draiveri funktsionaalne skeem.

TI draiverid BLDC jaoks
TI harjadeta mootoridraiverid ehk BLDC võivad sisaldada integreeritud toitesilda või kasutada väliseid toitetransistore. Ahel 3-faasiliste juhtsignaalide genereerimiseks võib olla ka väline või sisseehitatud.
Harjadeta elektrimootorite juhtimiseks mõeldud draiverite perekonda kuuluvad erinevate juhtimispõhimõtete ja erineva pöördemomendiga mudelid. Need draiverid sobivad ideaalselt kasutamiseks tööstusseadmetes, autosüsteemides ja muudes rakendustes, pakkudes BDLC-ga sõites erinevat müratasemeid. Mootorite usaldusväärse töö tagamiseks pakuvad draiverid terviklikku ülevoolu-, ülepinge- ja ületemperatuuri kaitset. Joonisel 18 on näidatud vaid mõned 3-faasilised BLDC draiverid TI ulatuslikus ja kasvavas portfellis.

Pöörleva rootori hetkeasendi juhtimiseks saab kasutada erinevat tüüpi väliseid andureid või juhtahelat, mis määrab rootori asendi tagasi-EMF (Back Electromotive Force, BEMF) väärtuse järgi.
Juhtimist saab teostada PWM-i, analoogsignaalide või standardsete digitaalliideste abil. Pöörlemise juhtimise kohandatavate parameetrite komplekte saab salvestada sisemisse püsimällu.
Joonisel 19 on kujutatud intelligentset draiverit BLDC-le, mis töötab laias temperatuurivahemikus 40…125°C koos sisseehitatud FET-toitelülititega, avatud kanali takistusega vaid 250 mΩ. Tööpingevahemikus 8…28 V saab juht anda nimivoolu 2 A ja tippvoolu 3 A.

Juht ei vaja rootori asendi juhtimiseks välist andurit, kuid saab kasutada välist takistit, et juhtida mootori poolt tarbitavat võimsust. on ooterežiimis väike, vaid 3 mA energiatarve. Ja mudelis on see indikaator viidud 180 μA tasemele.
Sisseehitatud I2C liides pakub diagnostikat ja konfigureerimist, juurdepääsu loogikaahela juhtimisregistritele ja draiveri tööprofiilidele, mis on salvestatud EEPROM-i mällu.
Laiendatud kaitsefunktsioonide komplekt tagab mootori seiskamise üle- ja alapinge korral. Sisendpinge on piiratud. Ülevoolukaitse töötab ilma välist takistit kasutamata. Kaitse kasutamise meetodid konfigureeritakse spetsiaalsete registrite kaudu.
Järeldus
Elektrimootoreid kasutatakse üha enam mitmesugustes seadmetes, mida täiustatakse ja avanevad uued võimalused suuresti tänu kaasaegsetele elektriajamisüsteemidele.
Texas Instrumentsi pooljuhtide portfell sisaldab laia valikut draiveri IC-sid igat tüüpi alalisvoolumootorite juhtimiseks. Nende põhjal pakub ettevõte täpsuse, võimsuse ja funktsionaalsuse nõuetest olenevalt skaleeritavaid lahendusi laias voolu- ja pingevahemikus töötavate ajamite loomiseks, pakkudes kollektor-, harjadeta ja samm-mootorite usaldusväärset ja mugavat tööd täisvooluhulgaga. , pinge ja temperatuuri kaitse .
Transistori samm-mootori draiver
Esitan teie tähelepanu KT-seeria bipolaarsete transistoride bipolaarse samm-mootori draiveri.
Juht töötab emitteri järgija põhimõttel. Juhtsignaal suunatakse transistori kt315 külge monteeritud võimendusastmesse. Pärast seda jõuab see H-sillale komplementaarpaarist KT815 ja KT 814.
Võimendusaste on vajalik, kuna mikrokontrolleri väljundi vooluvõimsusest ei piisa  toitetransistorite avamine. Pärast jõutransistore paigaldatakse dioodid mootori iseinduktsiooni summutamiseks.
toitetransistorite avamine. Pärast jõutransistore paigaldatakse dioodid mootori iseinduktsiooni summutamiseks.
Ahel näeb ette ka mürasummutust kondensaatorite kujul, mille suurus on 3 kuni 0,1 mikrofaradi ja 1 kuni 100 mikrofaradi. Kuna draiver oli mõeldud töötama 150-vatise CD-ajamiga mootoriga, ei ole transistorjahutus seda

Transistori draiveriga ühendatud CD-seadme samm-mootor
paigaldati, kuid KT814 ja KT815 transistoride maksimaalne emitteri vool on 1,5 A, tänu millele saab see draiver mootoreid veelgi võimsamaks keerata. Selleks on vaja ainult jahutusplaate paigaldada jõutransistoridele.
Kuigi bipolaarsed samm-mootorid on suhteliselt kallid, tagavad need oma füüsilise suuruse jaoks suure pöördemomendi. Kahe mootorimähise jaoks on aga vaja kaheksat juhttransistori, mis on ühendatud nelja H-sillaga. Iga transistor peab taluma ülekoormust ja lühiseid ning kiiresti taastuma. Ja juht vajab vastavalt keerulisi kaitseahelaid suure hulga passiivsete komponentidega.

1. pilt
Joonis 1. Üks kiip pindpaigalduspaketis ja mitu passiivset komponenti võivad juhtida bipolaarset samm-mootorit.
Bipolaarne samm-mootori juhtimine
DIY samm-mootori draiver— Joonis 1 kujutab alternatiivset mootoridraiveri vooluringi, mis põhineb Maximi D-klassi helivõimendil. Miniatuurses pinnale paigaldatavas pakendis MAX9715 suudab tavalise 4 või 8 oomi koormuse korral anda kuni 2,8 W. Mõlemad mikrolülituse kaks väljundit on moodustatud võimsate MOSFET-ide H-silladest, mis juhivad liinipaare OUTR +, OUTR- ja OUTL +, OUTL-, mis on ühendatud vastavalt samm-mootori mähistega A ja B. Iga paar genereerib diferentsiaalimpulsi laiusega moduleeritud signaali nominaalse lülitussagedusega 1,22 MHz. Ahela tekitatud madal müratase välistab vajaduse väljundfiltrite järele.
Lahtisiduvad kondensaatorid
Kondensaatorid C1, C3, C4 ja C6 toimivad võimsuse ja eelpingesisendite lahtisidumisena, samas kui C5 ja C7 täidavad salvestusfunktsioone suure võimsusega klassi D väljundvõimendite jaoks. Kondensaatorid C8 ja C9 piiravad võimendi ribalaiust 16 Hz-ni ning ferriithelmed L2 ja C7 L3 summutab pikkadel kaablitel tekitatud elektrimüra. U-kujuline filter C1, C2, L1 summutab häireid IC1 kiibi toitesisendil. Step_A ja Step_B mikroskeemide sisendsignaale, mis juhivad vastavalt mootori paremat ja vasakut kanalit, saab genereerida mis tahes sobiva kontrolleriga. Sisemised ahelad kaitsevad võimendit lühiste ja ülekuumenemise eest samm-mootori rikke või selle väljundite vale ühendamise korral.

Tabel 1
Pulsirongi illustratsioon
Tabel 1 illustreerib impulsside järjestust Step_A ja Step_B, mis juhivad tüüpilise samm-mootori pöörlemist ühes suunas, rakendades pidevalt signaalikombinatsioone vahemikus 0 kuni 4. Etapp 4 tagastab mootori võlli algsesse asendisse, pöörates lõpule 360°. Mootori pöörlemissuuna muutmiseks alustage tabeli allosast impulsside ajastusskeemi moodustamist ja liikuge mööda seda järjest üles. Rakendades mikrolülituse SHDN-sisendile (kontakt 8) loogilist madalpinget, saate mõlemad võimendi kanalid välja lülitada. Vooluahela sisendite ja väljundite lainekujud on näidatud joonisel 2.
Lühitutvustus draiverite teooriasse ja tüüpidesse, näpunäiteid samm-mootori optimaalse draiveri valimiseks.
Kui sa tahadosta samm-mootori draiver , klõpsake paremal oleval informaatoril
Teave, mis võib teid aidata valige samm-mootori draiver.
Sammmootor on keerulise juhtimisahelaga mootor, mis vajab spetsiaalset elektroonilist seadet – samm-mootori draiverit. Sammmootori draiver võtab sisendis vastu STEP / DIR loogikasignaale, mida reeglina esindavad 5 V võrdluspinge kõrge ja madal tase, ning vastavalt vastuvõetud signaalidele muudab voolutugevust mootori mähised, sundides võlli etteantud nurga võrra vastavas suunas pöörlema. >STEP/DIR-signaale genereerib CNC-kontroller või personaalarvuti, mis töötab juhtimisprogrammiga nagu Mach3 või LinuxCNC.
Juhi ülesandeks on muuta võimalikult efektiivselt voolu mähistes ning kuna hübriid-sammmootori mähiste ja rootori induktiivsus segavad seda protsessi pidevalt, erinevad draiverid üksteisest suuresti oma omaduste poolest ja saadud liikumise kvaliteet. Mähistes voolav vool määrab rootori liikumise: voolu suurus määrab pöördemomendi, selle dünaamika mõjutab ühtlust jne.
Sammmootorite draiverite tüübid (liigid).
Draiverid jagunevad vastavalt mähistesse voolu pumpamise meetodile mitut tüüpi:
1) Püsipinge draiverid
Need draiverid rakendavad mähistele omakorda konstantset pingetaset, millest tulenev vool sõltub mähise takistusest ja suurtel kiirustel ka induktiivsusest. Need draiverid on äärmiselt ebaefektiivsed ja neid saab kasutada ainult väga madalatel kiirustel.
2) Kahetasandilised draiverid
Seda tüüpi draiveri puhul tõstetakse mähises olev vool esmalt kõrgepinge abil soovitud tasemele, seejärel lülitatakse kõrgepingeallikas välja ja soovitud voolu säilitatakse madalpingeallika abil. Need draiverid on üsna tõhusad, vähendavad muuhulgas mootori kuumust ja neid leidub aeg-ajalt endiselt tippseadmetes. Sellised draiverid toetavad aga ainult sammu ja poole sammu režiimi.
3) PWM-iga draiverid.
Praegu on PWM samm-mootori draiverid kõige populaarsemad, peaaegu kõik turul olevad draiverid on seda tüüpi. Need draiverid rakendavad samm-mootori mähisele väga kõrge pingega PWM-signaali, mis katkestatakse, kui vool saavutab vajaliku taseme. Vooluhulk, mille juures katkestus toimub, määratakse kas potentsiomeetri või DIP-lülitiga, mõnikord programmeeritakse see väärtus spetsiaalse tarkvara abil. Need draiverid on üsna intelligentsed ja varustatud paljude lisafunktsioonidega, toetavad erinevaid astmejaotusi, mis võimaldab tõsta positsioneerimise eraldusvõimet ja sujuvust. Kuid ka PWM-draiverid on üksteisest väga erinevad. Lisaks sellistele omadustele nagu toitepinge ja maksimaalne mähisvool on neil erinev PWM-sagedus. Parem on, kui draiveri sagedus on üle 20 kHz ja üldiselt, mida kõrgem see on, seda parem. Sagedus alla 20 kHz halvendab mootorite tööomadusi ja langeb kuuldavasse vahemikku, samm-mootorid hakkavad tekitama ebameeldivat piiksumist. Sammmootorite draiverid jagunevad mootorite endi järel unipolaarseteks ja bipolaarseteks. Alustavatel tööpinkide valmistajatel soovitatakse tungivalt mitte katsetada ajamiga, vaid valida need, mille jaoks saate maksimaalselt tehnilist tuge, teavet ja mille tooted on turul kõige laiemalt esindatud. Need on bipolaarsed hübriidsed samm-mootori draiverid.
Kuidas valida samm-mootori draiverit (SM)
Esimene parameeter Asi, millele peaksite samm-mootori draiveri valimisel tähelepanu pöörama, on vooluhulk, mida draiver suudab pakkuda. Reeglina on see reguleeritud üsna laias vahemikus, kuid kui juht peab valima sellise, mis suudab anda valitud samm-mootori faasivooluga võrdse voolu. Muidugi on soovitav, et juhi maksimaalne voolutugevus oleks veel 15-40% suurem. Ühest küljest annab see varu juhuks, kui soovite mootorilt rohkem pöördemomenti saada või tulevikus võimsama mootori paigaldada, teisest küljest pole see üleliigne: tootjad mõnikord "kohandavad" nimiväärtusi elektroonikakomponentide ühendamine üht või teist tüüpi/suurusega mootoritele, nii et liiga võimas 8A juht, mis juhib NEMA 17 (42 mm) mootorit, võib näiteks põhjustada liigset vibratsiooni.
teine hetk on toitepinge. Väga oluline ja vastuoluline parameeter. Selle mõju on üsna mitmetahuline - toitepinge mõjutab dünaamikat (pöördemomenti suurtel pööretel), vibratsiooni, mootori ja juhi soojenemist. Tavaliselt on draiveri maksimaalne toitepinge ligikaudu võrdne maksimaalse vooluga I korda 8-10. Kui draiveri maksimaalne määratud toitepinge erineb nendest väärtustest järsult, peaksite lisaks küsima, mis on sellise erinevuse põhjus. Mida suurem on mootori induktiivsus, seda suurem on juhi jaoks vajalik pinge. On olemas empiiriline valem U = 32 * sqrt(L), kus L on samm-mootori mähise induktiivsus. Selle valemiga saadud U väärtus on väga ligikaudne, kuid see võimaldab teil juhi valimisel navigeerida: U peaks ligikaudu võrduma draiveri toitepinge maksimaalse väärtusega. Kui U on 70, siis EM706, AM882, YKC2608M-H draiverid läbivad selle kriteeriumi.
Kolmas aspekt– optroniga sisendite olemasolu. Peaaegu kõigis tehastes toodetavates draiverites ja kontrollerites, eriti kaubamärgiga draiverites, on optronid kohustuslik, kuna draiver on jõuelektroonikaseade ja võtme rike võib põhjustada võimsa impulsi kaablites, mille kaudu juhtsignaale tarnitakse, ja põleda. välja kallis CNC-kontroller. Kui aga otsustate valida võõra mudeli samm-mootori draiveri, peaksite lisaks küsima ka sisendite ja väljundite optoisolatsiooni olemasolu.
Neljas aspekt– resonantsi summutamise mehhanismide olemasolu. Sammmootori resonants on nähtus, mis esineb alati, erinevus on ainult resonantssageduses, mis sõltub eelkõige koormuse inertsmomendist, draiveri toitepingest ja mootori faasi seatud voolust. Resonantsi ilmnemisel hakkab samm-mootor vibreerima ja kaotab pöördemomenti, kuni võll täielikult seiskub. Resonantsi summutamiseks kasutatakse mikrosammu ja sisseehitatud resonantsi kompensatsiooni algoritme. Resonantsis võnkuva samm-mootori rootor tekitab mähistes induktsioon-EMF mikrovõnkumisi ning nende olemuse ja amplituudi järgi määrab juht ära, kas resonants on olemas ja kui tugev see on. Olenevalt saadud andmetest nihutab juht mootoriastmeid üksteise suhtes ajas veidi – selline kunstlik ebatasasus tasandab resonantsi. Resonantsi summutus on sisse ehitatud kõikidesse Leadshine DM, AM ja EM seeria draiveritesse. Resonantsi summutamise draiverid on kvaliteetsed draiverid ja kui teie eelarve võimaldab teil neid kasutada. Kuid isegi ilma selle mehhanismita jääb juht täiesti töötavaks seadmeks - suurem osa müüdavatest draiveritest on ilma resonantskompensatsioonita, kuid kümned tuhanded masinad töötavad kõikjal maailmas probleemideta ja täidavad edukalt oma ülesandeid.
Viies aspekt- protokolliosa. Peate veenduma, et draiver töötab vastavalt teile vajalikule protokollile ja sisendsignaali tasemed ühilduvad vajalike loogikatasemetega. See kontroll on viies punkt, sest harukordsete eranditega töötab valdav enamus draivereid STEP / DIR / ENABLE protokolli järgi ja ühildub signaalitasemega 0..5 V, tuleb vaid igaks juhuks veenduda .
Kuues aspekt- kaitsefunktsioonide olemasolu. Nende hulgas kaitse toitepinge ületamise, mähisvoolu (sealhulgas lühismähiste eest), toitepinge polaarsuse ümberpööramise ja samm-mootori faaside vale ühendamise eest. Mida rohkem selliseid funktsioone, seda parem.
Seitsmes aspekt– mikrosammu režiimide olemasolu. Nüüd on peaaegu igal juhil palju mikrosammu režiime. Kuid igal reeglil on erandeid ja Geckodrive'i draiverites on ainult üks režiim - 1/10 sammu jaotused. See on ajendatud sellest, et suurem jaotus ei too kaasa suuremat täpsust, mis tähendab, et see pole vajalik. Praktika näitab aga, et mikrosamm ei ole kasulik üldse mitte positsioneerimise diskreetsuse või täpsuse suurendamise tõttu, vaid seetõttu, et mida suurem on sammujaotus, seda sujuvam on mootori võlli liikumine ja vähem resonantsi. Sellest lähtuvalt, ceteris paribus, tasub kasutada jaotust, mida rohkem, seda parem. Maksimaalse lubatud sammujaotuse määravad mitte ainult draiverisse sisseehitatud Bradise tabelid, vaid ka sisendsignaalide maksimaalne sagedus - näiteks 100 kHz sisendsagedusega juhi puhul pole mõtet kasutada jagamine 1/256, kuna pöörlemiskiirus on piiratud 100 000 / (200 * 256) * 60 = 117 p / min, mis on samm-mootori jaoks väga madal. Lisaks ei suuda personaalarvuti peaaegu 100 kHz sagedusega signaale genereerida. Kui te ei kavatse kasutada riistvaralist CNC-kontrollerit, on teie lagi tõenäoliselt 100 kHz, mis vastab jaotusele 1/32.
Kaheksas aspekt- Lisafunktsioonide olemasolu. Neid võib olla palju, näiteks "seiskumise" määramise funktsioon - võlli järsk seiskumine kinnikiilumisel või pöördemomendi puudumine samm-mootoris, väljundid välise vea näitamiseks jne. Kõik need pole vajalikud, kuid võivad masina ehitamisel elu oluliselt lihtsamaks teha.
Üheksas ja kõige olulisem aspekt- juhi kvaliteet. Sellel on vähe pistmist omadustega jne. Turul on palju pakkumisi ja vahel langevad kahe tootja draiverite omadused peaaegu komakohani kokku ning neid kordamööda masinale paigaldades saab selgeks, et üks tootjatest ei tee selgelt oma tööd, ja odavate triikraudade valmistamisel läheb tal rohkem õnne. Algajal on üsna keeruline juhi taset eelnevalt teatud kaudsete andmete abil kindlaks teha. Võite proovida keskenduda arvukatele nutikatele funktsioonidele, nagu "seiskumise tuvastamine" või resonantsi summutamine, samuti kasutada tõestatud meetodit - kaubamärkide sihtimist.
Sammmootorid on huvitavad, kuna võimaldavad võlli teatud nurga all pöörata. Sellest lähtuvalt saate nende abiga võlli pöörata teatud arvu pöörete võrra, kuna N pööret on ka teatud nurk, mis on võrdne 360 * N, sealhulgas mittetäisarvuline pöörete arv, näiteks 0,75 pööret, 2,5 pööret, 3,7 käive jne. Need samm-mootorite võimalused määravad nende rakendusala. Neid kasutatakse peamiselt erinevate seadmete positsioneerimiseks: lugemispead kettaseadmetes, prindipead printerites ja plotterites jne.
Loomulikult ei saanud raadioamatöörid selliseid võimalusi ignoreerida. Nad kasutavad edukalt steppereid omatehtud robotite, omatehtud CNC-masinate jms ehitamisel. Allpool on kirjeldatud minu samm-mootoriga tehtud katsete tulemusi, loodan, et sellest võib kellelegi kasu olla.
Mida me siis katseteks vajame. Esiteks samm-mootor. Võtsin salapärase nimega 5-voldise hiina bipolaarse stepperi, mis on vanast 3,5" draivi küljest lahti rebitud, analoogselt M20SP-GW15-ga. Teiseks, kuna mootori mähised tarbivad märkimisväärset voolu (antud juhul kuni 300 mA), siis on see täiesti arusaadav, et stepperit pole võimalik otse kontrolleriga ühendada, vaja on draiverit.
Bipolaarsete samm-mootorite draiverina kasutatakse tavaliselt nn H-silla vooluringi või spetsiaalset mikrolülitust (millel on ikkagi H-sild sisse ehitatud). Muidugi saab ise voolida, aga mina võtsin samalt vanalt kettalt valmis mikruha (LB1838). Tegelikult vajame oma katseteks lisaks kõigele eelnevale ka: PIC-kontrollerit (PIC12F629 võeti kui odavaimat) ja paari nuppu.
Enne kui läheme otse vooluringi juurde, käsitleme veidi teooriat.
Bipolaarsel samm-mootoril on kaks mähist ja vastavalt sellele on see ühendatud nelja juhtmega. Mähiste otsad leiad lihtsa kõnega - sama mähisega seotud juhtmeotsad hakkavad omavahel helisema, aga erinevate mähistega seotud otsad mitte. Esimese mähise otsad tähistatakse tähtedega "a", "b" ja teise mähise otsad tähtedega "c", "d".
Kõnealusel isendil on mootori juures olevate kontaktide digitaalne märgistus ja juhtmete värvimärgistus (jumal teab, võib-olla on see ka mingi standard): 1 - punane, 2 - sinine - esimene mähis; 3 - kollane, 4 - valge - teine mähis.
Bipolaarse samm-mootori pöörlemiseks peavad mähised olema pingestatud tabelis näidatud järjekorras. Kui tabeli läbimise suund on valitud ülalt alla ringikujuliselt, siis mootor pöörleb edasi, kui alt üles ringiga, siis mootor pöörleb tagasi:
Ühe täistsükli jooksul teeb mootor neli sammu.
Õigeks tööks tuleb rangelt järgida tabelis näidatud lülitusjärjestust. See tähendab, et näiteks pärast teist kombinatsiooni (kui kasutasime + väljundile "c" ja miinust väljundile "d"), saame rakendada kas kolmandat kombinatsiooni (teise mähise välja lülitada ja esimesel rakendada "a" ja + kuni "b"), siis pöördub mootor ühe sammu edasi või esimene kombinatsioon (mootor pöördub ühe sammu tagasi).
Kombinatsioon, millega peate pöörlemist käivitama, määratakse viimase kombinatsiooni järgi, mis mootorile enne selle väljalülitamist rakendati (kui seda muidugi käsitsi ei keeratud) ja soovitud pöörlemissuunda.
See tähendab, et me pöörasime mootorit 5 sammu edasi, rakendades sellele kombinatsioone 2-3-4-1-2, seejärel vabastasime selle pingest ja siis tahtsime veel ühe sammu edasi pöörata. Selleks tuleb mähistele kanda kombinatsioon 3. Oletame, et pärast seda tõmbasime selle uuesti pingest välja ja mõne aja pärast tahtsime seda 2 sammu tagasi tagasi viia, siis tuleb mootorile rakendada kombinatsioonid 2-1. Ja nii edasi samas vaimus.
See tabel võimaldab muuhulgas hinnata, mis juhtub samm-mootoriga, kui mähiste või mähiste otste ühendamise järjekorda segame.
Siin lõpetame mootoriga ja liigume edasi LB1838 draiveri juurde.
Sellel mikruhal on neli juhtjalga (IN1, IN2, EN1, EN2), millele saadame kontrollerilt signaale ja neli väljundjala (Out1, Out2, Out3, Out4), mille külge on ühendatud mootori mähised. Mähised on ühendatud järgmiselt: juhe "a" on ühendatud Out1, traat "b" väljundiga Out2, traat "c" väljundiga 3, juhe "d" väljundiga Out4.
Allpool on draiveri kiibi tõepära tabel (väljundite olek olenevalt sisendite olekust):
| IN1 | ET1 | Out1(a) | Out2(b) | IN2 | ET2 | Out3(c) | Out4(d) |
| madal | kõrge | + | — | madal | kõrge | + | — |
| kõrge | kõrge | — | + | kõrge | kõrge | — | + |
| X | madal | väljas | väljas | X | madal | väljas | väljas |
Nüüd joonistame skeemile, mis kujul peaksid olema signaalid IN1, EN1, IN2, EN2 ühe täispöördetsükli (4 sammu) kohta, s.o. nii et kõik 4 mähiseühenduse kombinatsiooni ilmuvad väljunditesse järjestikku:

Kui vaadata seda diagrammi (vasakul) tähelepanelikult, siis selgub, et signaalid IN1 ja IN2 saab teha täpselt samadeks, st mõlemale jalale saab anda sama signaali. Sel juhul näeb meie diagramm välja järgmine:

Niisiis näitab viimane diagramm, millised signaalitasemete kombinatsioonid peaksid olema draiveri juhtsisenditel (EN1, EN2, IN1, IN2), et saada vastavad mootori mähiste ühendamise kombinatsioonid, ja nooled näitavad, millises järjekorras neid kombinatsioone tuleks muuta, et tagada pöörlemine soovitud küljele.
See on põhimõtteliselt kogu teooria. Vajalikud tasemete kombinatsioonid juhtsisenditel moodustab kontroller (kasutame PIC12F629).
Skeem:
Valmis seade:


Juhtprogramm rakendab järgmist algoritmi: KN1 nupu vajutamisel pöörleb mootor ühe sammu ühes suunas, KN2 nupu vajutamisel aga sammu teises suunas.
Tegelikult saab selle siia keerata ja arvutist juhtimist rakendada (edastuskiirus, sammude arv ja pöörlemissuund arvutist).



