Sihtmärgi manööverdamine horisontaaltasandil taandub kursi ja lennukiiruse muutmisele. Õhusihtmärgi manöövri mõju hävitaja juhtimise esimeses ja teises etapis “Manööver” meetodil avaldub erineval viisil.
Oletame, et juhendamine toimub esimesel etapil, kui sihtmärk ja hävitaja olid vastavalt punktides IN Ja A (joon. 7.9.) ja nende kohtumine oli punktis võimalik S o .
Riis. 7.9. Sihtmanöövri mõju horisontaaltasandil
hävitaja lennutrajektooril
Kui õhu sihtmärk on punktis IN manööverdas kursi ja aega t pöördus nurga poole w t , siis selleks, et võitleja järgiks teise juhtimise etapi pöördekaare puutujat, peab selle kurss muutuma samal ajal nurga võrra w ja t . Pärast seda, kui õhusihtmärk on manöövri lõpetanud, on võimalik temaga kohtumine punktis KOOS ja õhusihtmärgi teekonna pikkus punktini muutub väärtuseks DSc.
Kui kujutame ette, et pöörde alguspunkt liigub koos TC-ga, mis asub selle suhtes samal intervallil ja kaugusel kui võitleja pöörde alguse hetkel, siis suunatakse hävitaja sellesse punkti, kasutades "Parallel Approach". ” meetod. Kui CC on kaugel Enne võitlejalt, millega võrreldes intervall I ja ennetav pöördekaugus Dupr võib tähelepanuta jätta, siis üldiselt on “Manööver” meetodi omadused lähedased “Paralleellähenemise” meetodi omadustele.
Hilisemale võitleja kohtumisele sihtmärgiga (DSc > 0) viib ta võitlejast eemale (DΘ ja > 0) , ja võitleja poole pööramine viib varasema kohtumiseni. Seetõttu võib sihtmärgi kursimanöövri vastu võitlemise meede, nagu ka "paralleellähenemise" meetodit kasutav juhendamine, olla võitlejate rühmade samaaegne sihtimine eri suundadest.
Kui kaugus TC-st väheneb, ilmneb üha selgemini erinevus “Manööver” meetodi omaduste ja “Paralleellähenemise” meetodi omaduste vahel. VT pööramise ajal peab hävitaja pöörama üha suuremate nurkade all, see tähendab, et selle nurkkiirus w suureneb.
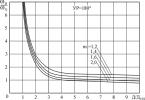
Väärtuse muutus w ja kui hävitaja lendab kokkupõrkekursil õhusihtmärgiga (UR = 180°) iseloomustab nurkkiiruste vaheliste seoste graafikut w ja / w c vahemikust, väljendatuna juhtpöörde vahemaa murdosades D/Dupr.
Nagu graafikult näha, pikkadel vahemikel (D/Dupr = 5÷ 10) suhtumine w ja / w c erineb pisut ühtsusest, see tähendab, et hävitaja nurkkiirus erineb veidi manööverdatava sihtmärgi nurkkiirusest. Vahemiku vähenemisega umbes kolmele Super , kasvab wi väärtus intensiivselt ja kui võitleja läheneb pöörde alguspunktile (D/Dupr = 1)w ja suureneb lõpmatuseni.
Seega, kui sihitakse “Manööver” meetodil manööverdavale CC-le, on peaaegu võimatu viia hävitajat arvutatud raadiusega punkti, kust pööre algab.

Riis. 7.10. Nurkkiiruste suhte sõltuvus w ja / w c sihtmanöövri ajal
juhendamise esimeses etapis seoses D/Dupr
Esimese etapi juhendamisprotsessi ajal võib õhusihtmärk manööverdada korduvalt. Nii näiteks õhusihtmärk mingis punktis IN 1 saab võitleja sisse lülitada, mille tulemuseks on punkt A1 tuleb pöörata oma eelmiselt kursilt ära ja muuta varem planeeritud pöörde suunda. Selle tulemusel muutub võitleja trajektoor juhtimise esimeses etapis sirgjoonest keerukaks jooneks, mis koosneb muutuva raadiusega pöördekaartest ja nendevahelistest sirgetest segmentidest. Kõik see raskendab lennu sooritamist õhulahingule.
Vaatleme õhusihtmärgi manöövri mõju hävitaja juhtimise teises etapis, kasutades “Manööver” meetodit, kasutades joonist 7.11:

Riis. 7.11. Õhusihtmärgi manöövri mõju horisontaaltasandil
juhendamise teises etapis "manöövri" meetodil hävitaja lennutrajektoorile
Oletame, et mingil hetkel teise juhtimise etapis on hävitaja ja õhusihtmärk vastavalt punktides. A Ja IN ja eesmärgi saavutamiseks punktis Co võitleja teeb raadiusega pöörde Ro ja nurkkiirus w ja = Vi/ Ro .
Kui mõneks ajaks Dt õhusihtmärk muudab oma lennusuunda nurga võrra w × Dt , siis saab temaga kohtumine hetkel võimalikuks KOOS . Et jõuda punktist sellesse punkti A võitlejal oleks vaja teha teistsuguse raadiusega pööre R . Aga aegsasti ette Dt ta peaks lisaks veel ümber nurga keerama w ja D × Dt .
Seega põhjustab õhusihtmärgi manööver juhtimise teises etapis hävitaja täiendava pöördenurkkiiruse tekkimise. w ja D . Mida väiksem on järelejäänud pöördenurk UR võitleja, seda suurem väärtus w ja D , ja kui võitleja läheneb pöörde lõpp-punktile w ja D suureneb lõpmatuseni.
Seega on teisel juhendamise etapil manööverdamismeetodil peaaegu võimatu hävitajat manööverdava õhusihtmärgi suhtes antud asendisse viia.
Sellega seoses lülituvad nad õhusihtmärgi manööverdamisel teisel etapil reeglina hävitaja juhtimisele, kasutades “Pursuit” meetodit.
Jälgitava sihtmärgi manööver, mille kestus ületab VDU sisendis teabe värskendamise perioodi, väljendub dünaamilistes filtreerimisvigade süstemaatilise komponendi ilmnemises.
Vaatleme näiteks punktini jõudva sihttrajektoori konstrueerimise protsessi B(joon. 12.15) liikus ühtlaselt ja sirgjooneliselt ning seejärel alustas manöövrit suure (1), keskmise (2) või väikese (3) ülekoormusega (katkendlikud punktiirjooned). Tuginedes trajektoori sirge lõigu parameetrite hindamisele, mis põhineb filtreerimise n mõõtmise tulemustel (joonisel tähistatud ringiga), sihtmärgi hetkekoordinaatidel (katkendjoon) ja ekstrapoleeritud koordinaatidel ( n+1) arvustus (kolmnurk).
| A |
| B |
Nagu jooniselt näha, sisaldavad pärast manöövri algust tarbijatele väljastatud sihtmärgi praegused koordinaadid dünaamilist viga, mille suurus on suurem, mida suurem on sihtmärgi ülekoormus manöövri ajal ja ruumi vaatamise periood.
Nendes tingimustes sihtmärgi automaatseks jälgimiseks on vaja esiteks tuvastada (identifitseerida) manööver ja teiseks, loobudes hüpoteesist sihtmärgi sirgjoonelisest ja ühtlasest liikumisest, määrata manöövri parameetrid ja selle põhjal kasutada uus hüpotees sihtmärgi liikumisest.
Sihtkoordinaatide diskreetsete mõõtmiste tulemuste põhjal manöövri tuvastamiseks on teada mitmeid meetodeid:
1. Filtreerimise peatamise põhjuseks sirgjoonelise ühtlase liikumise hüpoteesi järgi võib olla teatud konstantse väärtuse jääkmooduli ületamine. Sellisel juhul on vajalik tingimus filtreerimise jätkamiseks pärast vastuvõtmist n märgi saab esitada järgmisel kujul:
 ;
;  (1)
(1)
kus: Δ P, Δ D- konstandid, mis määravad lahknevuse lubatud väärtuse ja sõltuvad radari ülevaatuse perioodist ja sihtmärgi ülekoormuse aktsepteeritud väärtusest manöövri ajal;
P n, D n- n-ndas uuringus mõõdetud laagri- ja vahemiku väärtused;
, - n-nda mõõtmise ajal ekstrapoleeritud laagri- ja vahemiku väärtused.
2. Kõrgemate nõuetega manöövrite tuvastamise kvaliteedile horisontaaltasapinnas ristkülikukujulises koordinaatsüsteemis trajektooride jälgimise tingimustes määratakse lahknevuse lubatud väärtus igal ülevaatusel ja probleem lahendatakse järgmiselt:
a) iga koordinaatmõõtmise tulemuste põhjal arvutatakse ekstrapoleeritud ja mõõdetud koordinaatide väärtuste jääkmoodulid
 ;
; 
 ;
;
b) arvutatakse diskreetsete mõõtmisvigade dispersioon
kus σ D, σ P- kauguse ja laagri diskreetse mõõtmise ruutkeskmised vead;
c) arvutatakse ekstrapoleerimisvigade dispersioon
 ,
,

d) arvutatakse koordinaatide mõõtmise ja ekstrapoleerimise koguvea dispersioon
| (5) |
e) väärtusi võrreldakse d Ja  , kus on koefitsient, mis on valitud manöövri valetuvastuse vastuvõetava tõenäosuse tagamiseks.
, kus on koefitsient, mis on valitud manöövri valetuvastuse vastuvõetava tõenäosuse tagamiseks.
Kui võrdlusel selgub, et d>  , siis tehakse otsus “ootan manöövrit”. Kui ebavõrdsus rahuldatakse teist korda, siis tehakse “manöövri” otsus ja trajektoori parameetrite filtreerimine vastavalt kasutatud hüpoteesile peatatakse.
, siis tehakse otsus “ootan manöövrit”. Kui ebavõrdsus rahuldatakse teist korda, siis tehakse “manöövri” otsus ja trajektoori parameetrite filtreerimine vastavalt kasutatud hüpoteesile peatatakse.
3. Manöövri tuvastamise kriteeriumi valimisel kasutatakse ka teist lähenemisviisi. Igas uuringus arvutatakse polaarkoordinaatide jääkide autokorrelatsioonifunktsioon eelmises ja praeguses uuringus
 ,
,

Kui manöövrit pole, siis Δ D n ja Δ P n ei sõltu ülevaatusest ülevaatamiseni ja jääkide autokorrelatsioonifunktsioonid on väikesed või isegi null. Manöövri olemasolu suurendab oluliselt jääkide korrutise matemaatilist ootust. Otsus manöövri alustamiseks tehakse siis, kui autokorrelatsiooni funktsioonid ületavad teatud läve.
TEINE ÕPPEKÜSIMUS: Sihtmärgi jälgimine manöövri ajal.
Lihtsamal juhul, kui manöövri algus tuvastatakse pärast (n+1)-ndat sihtmärgi kiiritamist kahes punktis - hinnangulised koordinaadid n-ndas uuringus (avatud ring) ja mõõdetud koordinaadid punktis ( n+1) uuring (täisring) arvutab sihtmärgi kiirusvektori, mida saab kasutada hetkekoordinaatide ja ekstrapoleeritud koordinaatide arvutamiseks ( n+2) arvustus. Seejärel kasutatakse praeguses ja eelmistes uuringutes mõõdetud sihtkoordinaate sihttrajektoori koostamiseks ja ekstrapoleeritud koordinaatide arvutamiseks. Selle algoritmi järgi töötavat filtrit nimetatakse kahepunktiliseks ekstrapolaatoriks.
Sellise ekstrapolaatori kasutamisel on ekstrapoleeritud koordinaatide kõrvalekalle sihtmärgi tegelikust asukohast ( L 1, L 2, L 3) pika vaatamisperioodi ja suure sihtmärgi ülekoormusega manöövri ajal võib see olla üsna märkimisväärne; sel juhul antakse suurte vigadega tarbijatele sihtmärgi hetkekoordinaadid. Suured ekstrapoleerimisvead võivad viia selleni, et järgmine sihtmärk jääb automaatse jälgimise välgu piiridest väljapoole. Kuna strobo sees on tavaliselt valed märgid, siis valitakse neist üks ja seda kasutatakse trajektoori jätkamiseks vales suunas ning tegeliku sihtmärgi automaatne jälgimine on häiritud.
Pikaajalisel manöövril pideva ülekoormusega saab sihtmärgi jälgimise täpsust tõsta, määrates trajektoori kumeral lõigul saadud kolme esimese märgi järgi sihtmärgi kiirenduse ristkülikukujulised komponendid ja kiirendust edasi filtreerides. See probleem lahendatakse kasutades "α-β-γ"- filter, mille kordusalgoritm koordinaatide ja nende muutumise kiiruse hindamisel jääb samaks kui "α-β"- filter ja sihtkiirenduse hindamine näiteks koordinaatide järgi X pärast märgi sisse saamist n-th ülevaade arvutatakse valemiga
Kasutamine: automatiseeritud digitaalsüsteemides radariteabe tuvastamiseks ja töötlemiseks. Leiutise olemus: õhusihtmärgi koordinaatide diskreetne radarmõõtmine, sihtmärgi trajektoori hetkeparameetrite silumine filtri võimenduse muutumisega sõltuvalt manöövri akumuleeritud tõenäosusest. Uus on filtri võimenduskoefitsientide paigaldamine hetkel, kui sihtmärk siseneb võimalikku manöövritsooni, olenevalt manöövri akumuleeritud tõenäosusest. Jälgimise täpsuse suurendamine saavutatakse sihtmanöövri poolt põhjustatud jälgimisvea dünaamilise komponendi kompenseerimisega. 3 haige.
Leiutis käsitleb radarit ja seda saab kasutada automatiseeritud digitaalsüsteemides radariteabe tuvastamiseks ja töötlemiseks. Manööverdatava õhusihtmärgi jälgimiseks on teada meetodid ja seadmed, mis põhinevad koordinaatide diskreetsetel radarimõõtmistel ja selle trajektoori parameetrite (koordinaadid ja muutumiskiirused) voolu hindamisel (silumine ja ekstrapoleerimine) Eeldusel, et vaatlusperioodi jooksul on sihtmärk tehke ainult üks tahtlik suure intensiivsusega manööver koos manöövri tuvastamisel minimeeritakse korduva silumisfiltri mälu. Kuigi sel juhul kompenseeritakse dünaamiline silumisviga, mis on põhjustatud manööverdatava sihtmärgi tõelist trajektoori kirjeldava polünoomi astme hüpoteesi ja selle liikumise lineaarse hüpoteesi vahelisest lahknevusest, omandab silumisvea juhuslik komponent. koordinaatide mõõtmise antud täpsuse maksimaalne väärtus ja koguviga suureneb. Tuntud manööverdatava õhusihtmärgi jälgimise meetoditest on tehnilise olemuse ja saavutatud efekti poolest pakutavale kõige lähemal meetod, mille käigus manööver tuvastatakse praeguste väärtuste kõrvalekalde suuruse analüüsi põhjal. jälgitava trajektoori parameetrid nende mõõdetud väärtustest ja selle kõrvalekalde võrdlemine läviväärtusega manöövri tuvastamisel silutakse trajektoori parameetrid filtri võimenduskoefitsientidega, mis on võrdsed ühtsusega. Tulenevalt asjaolust, et trajektoori parameetrite silumisel; arvesse võetakse ainult manöövri olemasolu, selle meetodi silumisvead jäävad üsna suureks. Leiutise eesmärk on parandada madalalt lendava manööverdava õhusihtmärgi jälgimise täpsust. See saavutatakse sellega, et madalalt lendava manööverdava õhusihtmärgi jälgimise meetodil, mis põhineb koordinaatide diskreetsel radarimõõtmisel ja sihtmärgi trajektoori parameetrite silumisel filtri abil, sirgjoonelise liikumise lõikudes, mille filtri võimendus on kindlaks määratud. sihtseisundi müra järgi, mis määratakse laagrisuhetest vastavalt laagri muutumise kiirusele ja filtri võimenduskoefitsientide muutusele sihtmanöövrilõikudes trajektoorilõiku sisenemise hetkel, milles vastavalt a priori teabele trajektoori tunnuste kohta on manööver võimalik, sihtmärgi laagrisignaali silutakse filtri võimendusteguritega, mis on seatud vastavalt manöövriga kaasas olevate sihtmärkide akumuleeritud tõenäosusele: P n = 1/(N-n+1) , kus N on mõõtmiste arv võimaliku manöövri piirkonnas ja n on silumistsükli arv võimaliku manöövri piirkonnas, lähtudes laagrite suhtarvudest (p n) + -1 (1) laagri muutumise kiirusele (P n) - , kus a + 2 (2) r  (3) kus on laagrite mõõtmisvigade dispersioon; a on sihtmärgi maksimaalne kiirendus piki laagrit manöövri ajal; P om manöövri õige tuvastamise tõenäosus; T on radari ülevaatuse periood ja sihtmanöövri tuvastamise hetkel silutakse laagrisignaali üks kord filtri võimenduskoefitsientidega ja seostest (1) ja (2) väärtusega r, mis tuleneb seosest r (4), kus R on manöövri valetuvastuse tõenäosus ja edasi Järgmistes silumistsüklites silutakse sihttrajektoori parameetrid filtri võimenduskoefitsientidega, mis määratakse seostest.
(3) kus on laagrite mõõtmisvigade dispersioon; a on sihtmärgi maksimaalne kiirendus piki laagrit manöövri ajal; P om manöövri õige tuvastamise tõenäosus; T on radari ülevaatuse periood ja sihtmanöövri tuvastamise hetkel silutakse laagrisignaali üks kord filtri võimenduskoefitsientidega ja seostest (1) ja (2) väärtusega r, mis tuleneb seosest r (4), kus R on manöövri valetuvastuse tõenäosus ja edasi Järgmistes silumistsüklites silutakse sihttrajektoori parameetrid filtri võimenduskoefitsientidega, mis määratakse seostest.
Kus
(n) (n)
n = int 
m ja m on filtri võimendused sihtmanöövri tuvastamise hetkel. Tuntud meetoditel madalalt lendava manööverdava õhusihtmärgi jälgimiseks ei ole sarnaseid omadusi, mis eristavad pakutud meetodit prototüübist. Äsja kasutusele võetud toimingute jada olemasolu võimaldab suurendada jälgimise täpsust õhusihtmärgi jälgimise trajektoori a priori teabe tõttu ja seega minimeerida jälgimisvigu, mis tekivad sihtmanöövri vahelejätmisel. Järelikult vastab väidetav meetod "uudsuse" ja "leiutamisastme" kriteeriumidele. Võimalus saavutada pakutud meetodist uute funktsioonidega positiivne mõju on tingitud dünaamilise laagri ekstrapolatsioonivea mõju kompenseerimisest, mis on määratud manöövridetektori poolt vahele jäänud sihtmanöövriga, muutes filtri võimendusi vastavalt manöövri akumuleeritud tõenäosus. Joonisel fig. 1 kujutab sihtmärgi manööverdamise skeemi; joonisel fig. 2 graafikut, mis illustreerivad pakutud meetodi tõhusust; joonisel fig. Joonisel 3 on näidatud seadme elektriline plokkskeem pakutud meetodi rakendamiseks. Kuna iga madalalt lendav kiire õhusihtmärk, mis äkitselt ilmub ja tuvastatakse näiteks radari kandelaeval, liigitatakse ründavaks, on mõistlik eeldada, et see sihtmärk pöördub suure tõenäosusega laeva poole, sooritades kodukoha manööver. Teisisõnu, selleks, et teatud ajahetkel laeva tabada, peab madalalt lendav kiire õhusihtmärk sooritama manöövri, mille tulemusena peab sihtmärgi kursiparameeter laeva suhtes saama võrdseks nulliga. Sellega seoses on kohustusliku sihtmanöövri eeldamine põhimõtteliselt õigustatud. Tulevikus käsitleme õhusihtmärgina suunamismanöövrit sooritavat laevavastast tiibraketti (ASCM). Meetod põhineb laevatõrje raketisüsteemi trajektoori tunnuste kasutamisel trajektoori viimasel lõigul. Laevatõrjeraketi trajektoor (vt joon. 1) sihtmärgist vähem kui 30 km kaugusel sisaldab kolme iseloomulikku trajektoori lõiku: sirget lõiku enne laevatõrjeraketi suunamismanöövri algust; võimaliku kodukoha manöövri ala; sirge trajektoori lõik pärast lähenemismanöövri lõpetamist. On teada, et laevavastaste rakettide, näiteks "Harpoon" tüüpi rakettide suunamismanööver tehakse sihtlaevast 5, 3, 20, 2 km kaugusel. Võib eeldada, et kaugemal kui 20,2 km on manöövri tõenäosus nullilähedane ja filtri võimenduste piiramise vajadus tuleneb ainult sihtseisundi müra olemasolust. Kuna puuduvad a priori andmed vaenlase poolt selles konkreetses taktikalises olukorras kasutatud laevatõrjerakettide tulistamismeetodi kohta, on põhjust eeldada, et sihtmanöövri algus on võrdselt tõenäoline igal ajal, kui laevatõrjerakett. jääb kaugustesse laevast D min 5,3 km ja D max 20,2 km . Rakett katab kindlaksmääratud ulatuse intervalli
t 1 = 50 s, kus V 290 m/s PCR lennukiirus. Sellest tulenevalt võib eeldada, et ajal, mil laevatõrjerakett on laevast eemal, võimaldades tal alustada lähenemismanöövrit, tehakse selle koordinaatide mõõtmised N N +1 + 1. Kuna manööver võib alata võrdse tõenäosusega igal vaatlusintervallil, on sündmuse tõenäosus, mis koosneb manöövri algusest n-ndal (n 1, 2,) intervallil, a priori võrdne
P
Kui manöövri algust ei tuvastata (n-1) koordinaatide mõõtmes, määrab manöövri akumuleeritud tõenäosus n-ndas dimensioonis seosega
P=
Laevavastase raketi kiirenduse hajumise sõltuvust manöövri ajal kogunenud tõenäosusest saab väljendada järgmiselt:
2 a = (1+4P n)(1-P ohm) (5) kus a on laevatõrjeraketisüsteemi maksimaalne kiirendus piki laagrit manöövri ajal (3,5g);
P om manöövri õige tuvastamise tõenäosus. Teades PCR-i (a) kiirenduse hajuvust ja eeldades ka, et laagrite mõõtmisvigade väärtused on teada, on võimalik arvutada filtri võimenduskoefitsientide väärtused, mis on voolusuhete jaoks optimaalsed. koordinaatmõõtmisvigade hajumisest, peenrit häirivast kiirendusest ja radari vaatamisperioodist: laagri järgi
(P n) (6) laagri muutumiskiiruse (P n) järgi, kus o 2 on laagri hinnanguvigade dispersioon;
laagri mõõtmise vea dispersioon;
R on korrelatsioonikordaja laagri hindamise vigade ja selle muutumise kiiruse vahel. O ja R o väärtused määratakse järgmiste seostega
2 o = + -1
R o = (7)
Asendades seoste (7) seostega (2) ja (3), saame laagrihinnangu vigade dispersiooni ja laagrihinnangu vigade korrelatsioonikordaja ja selle muutumise kiiruse ning asendades avaldisega (6), saame filtri võimendused, mis on määratud seosega (1). On ilmne, et kui pcr läheneb iga ülevaatega, suureneb manöövri akumuleeritud tõenäosus, mis põhjustab kiirenduse hajuvuse p cr suurenemise ja vastavalt sellele ka filtri võimenduse ja . Manöövri tuvastamisel omistatakse manöövri akumuleeritud tõenäosusele väärtus "üks" ja PCR-i kiirenduse hajuvus arvutatakse järgmiselt:
= a 2 (1-P praak) (8), kus P praak on manöövri valetuvastuse tõenäosus. Sel juhul r arvutatakse seosest (4), filtri võimendused omandavad maksimaalse väärtuse. Arvestades PCR manöövri lühikest kestust (1,3 s), piisab ühest tõstetud võimendusteguritega silumisest (seda kinnitavad simulatsioonimodelleerimise tulemused). Manöövri tõenäosuse hindamise protseduur viiakse läbi vahemikus 20,2–5,3 km. Pärast manöövri tuvastamist määratakse laagrifiltri võimendustele väärtused, mille määrab ainult sihtoleku müra, vahemiku võimendused jäävad kogu jälgimisaja jooksul konstantseks ja nende väärtused valitakse vastavalt sihtoleku mürale. Joonisel fig. Joonisel 3 on kujutatud seadet manööverdatava õhusihtmärgi automaatseks jälgimiseks, mis rakendab pakutud meetodit. See sisaldab mõõdetud koordinaatide andurit 1, silumisplokki 2, ekstrapoleerimisplokki 3, esimest viivitusplokki 4, mäluplokki 5, manöövri tuvastamise plokki 6, võrdlusplokki 7, teist viivitusplokki 8, plokki 9 filtri võimenduse arvutamine. Seade manööverdava õhu sihtmärgi automaatseks jälgimiseks koosneb järjestikku ühendatud andurist 1 mõõdetud koordinaadid, mille sisendiks on seadme sisend, anduri väljund 1 mõõdetud koordinaadid on ühendatud silumisploki 1. sisendiga. 2 ja manöövrituvastusploki 6 1. sisendisse, ekstrapoleerimisploki 3 sisendiga ühendatud silumisploki 2 väljund, ekstrapoleerimisploki 3 1. väljund on ühendatud võrdlusploki 7 sisendiga ja läbi viivitusplokk 4 silumisploki 2 4. sisendisse ja manöövrituvastusploki 6 2. sisendisse, ploki 3 ekstrapolatsiooni 2. väljund on seadme väljund, manöövrituvastusploki 6 väljund on ühendatud filtri võimenduse arvutamise ploki 9 2. sisend ja läbi viiteploki 8 mäluploki 5 2. sisendisse ja filtri võimenduse arvutamise ploki 9 3. sisendisse, ploki võrdlus 7 väljund on ühendatud 1. mäluploki 5 sisend ja ploki 9 1. sisend filtri võimenduse arvutamiseks, mäluploki 5 väljund on ühendatud silumisploki 2 2. sisendiga, ploki 9 väljund filtri võimenduse arvutamiseks on ühendatud 3. sisendplokiga 2 silumine. Seade töötab järgmiselt. Jooksva jälgitava sihtmärgi koordinaatide mõõtmise n-nda tsükli videosignaal vastuvõtva seadme väljundist edastatakse jälgimisseadme sisendisse ja vastavalt mõõdetud koordinaatide andurile 1. Mõõdetud koordinaatandur 1 teisendab videosignaali analoogvormist digitaalseks, valib kasuliku signaali ja mõõdab koordinaatide väärtusi: pearing (П n) ja ulatus (D n). Mõõdetud koordinaatide andurit 1 saab realiseerida vastavalt ühele automaatse õhusihtmärgi detektori tuntud skeemidest. Mõõdetud sihtkoordinaatide (P n ja D n) väärtused signaalikoodide kujul edastatakse silumisploki 2 1. sisendisse, mis teostab koordinaatide töötlemise operatsiooni järgmiselt: kui n 1, siis jooksev hinnang. sihtkoordinaatidest on
= M n, kus M n = П n, D n 2 korral on sihttrajektoori parameetrite praegune hinnang võrdne
= M n, V= (M n-1 -M n)/T o kus T on radari ülevaatuse periood; n>2 korral on sihttrajektoori parameetrite praegune hinnang võrdne
= +(M)
= +(M)/T kus ja on kaalukoefitsiendid (filtri võimendused);
ja ühele uuringule ekstrapoleeritud koordinaatide hinnangud ja nende muutumise kiirus. Plokist 2 edastatakse koordinaatide silutud väärtused ja nende muutumise kiirus ekstrapoleerimisploki 3 sisendisse. Ekstrapoleerimisplokk 3 genereerib trajektoori parameetrite hinnangud, mis on ekstrapoleeritud antud ajale:
= +VT e; = kus T e on ekstrapoleerimise ajavahemike määratud väärtus. Selles seadmes T e T o, T e T tsu. Sel juhul edastatakse ajaliselt ekstrapoleeritud koordinaatide väärtused esimesest väljundist viiteploki 4 kaudu silumisploki 2 4. sisendisse, kus neid kasutatakse trajektoori parameetrite arvutamiseks järgmises tsüklis ja Manöövrituvastusploki 6 2. sisend, kus need asuvad, lahutatakse mõõdetud koordinaatide anduri 1 manöövrituvastusploki 6 1. sisendisse antud mõõdetud laagriväärtustest ja saadud erinevust võrreldakse lävega järgmiselt. :
P n ->
Läviväärtused valitakse manöövri valetuvastuse nõutava tõenäosuse alusel. Samast väljundist saadetakse ekstrapoleeritud koordinaadid võrdlusploki 7 sisendisse, kus ekstrapoleeritud vahemiku väärtusi võrreldakse võimaliku manöövri vahemikuga 5,3–20,2 km. Ajaga T e ekstrapoleeritud koordinaatväärtused edastatakse ekstrapoleerimisploki 3 2. väljundisse (seadme väljund) ning neid kasutatakse sihtmärgi määramise andmete genereerimiseks ja tarbijatele väljastamiseks. Võrdlusplokis 7 genereeritakse loogiline üks signaal, kui ekstrapoleeritud vahemiku väärtus jääb võimalike väärtuste vahemikku, mis võrdlusploki 7 väljundist suunatakse mäluploki 5 1. sisendisse, keelates samal ajal filtri võimenduste väljastamine silumisplokki 2, samal ajal saabub sama signaal ploki 9 1. sisendisse filtri võimenduste arvutamiseks ja algatab võimenduse väljundi plokki 2 silumiseks. Kui ekstrapoleeritud vahemiku väärtused ei jää võimaliku manöövri vahemiku intervalli, genereeritakse loogiline nullsignaal, mis keelab plokist 9 võimendustegurite väljastamise filtri võimenduse arvutamiseks ja võimendustegurite väljastamise algatamisest. mäluplokk 5. Mäluplokk 5 salvestab filtri võimendused, mille väärtused määrab sihtoleku müra. Filtri võimenduste arvutamise plokis 9 arvutatakse võimendused loogilise ühe signaali saabumise ja manöövrituvastussignaali puudumise korral vastavalt seostele (1), (2) ja (3) ning "manööver tuvastatud" signaali saabumise juhtum vastavalt seostele (1), (2) ja (4). Plokis 6 genereeritakse "manööver tuvastatud" signaal ja saadetakse plokki 9 filtri võimenduse arvutamiseks, sama signaal saadetakse viivitusplokki 8 ja ühe ülevaatusperioodi võrra edasi lükatuna saadetakse mäluplokkidesse 5 ja 9 ning arvutusfiltrisse. kasu. Kavandatud meetodi tõhusust hinnati simulatsioonimudeli abil järgmiste lähteandmetega:
Harpuun-tüüpi laevatõrjeraketisüsteemi stardiulatus on 100 km;
RCC ülekoormus manöövri ajal 4 g;
Manöövri kestus 4 s;
Radari ülevaateperiood 2s;
Manööver algab 13–14 arvustusega. Joonisel fig. Joonisel 2 on näidatud normaliseeritud koordinaatide ekstrapolatsioonivea sõltuvus uuringu kohta mõõtmisarvust, kus:
1 pakutud meetod;
2 tuntud meetod. Pakutud meetodi rakendamisel kahekordistub koordinaatide ekstrapoleerimise täpsus.
Nõue
MANÖÖVERIÕHU SIHTMÄRK JÄLGIMISE MEETOD, mis põhineb koordinaatide diskreetsel radarimõõtmisel, sihtmärgi trajektoori parameetrite silumine filtri abil sirgjoonelise liikumise lõikudes filtrivõimendi koefitsientidega, mis on määratud sihtseisundi müra järgi, mis on suhetest määratud: kandmisega ![]()
kus j on praegune silumistsükkel;
laagrivahetuse kiiruse järgi
ja filtri võimenduskoefitsiendi muutmine sihtmanöövri lõikudes, mida iseloomustab see, et trajektoorilõiku sisenemise hetkel, kus manööver on võimalik sihttrajektoori tunnuste a priori teabe alusel, silutakse sihtmärgi laagri signaali filtri võimendusega. koefitsiendid, mis on määratud vastavalt jälgitava sihtmärgi manöövri akumuleeritud tõenäosusele,
Pn(Nn+1),
kus N on mõõtmiste arv võimaliku manöövri piirkonnas;
n silumistsükli number silumissektsioonis laagrisuhetest võimaliku manöövri osas (1)
laagrivahetuse kiiruse järgi (2) ![]()
![]()

kus 2 on laagrite mõõtmisvigade dispersioon;
a sihtmärgi maksimaalne kiirendus vastavalt suunale manöövri ajal;
P o. m manöövri õige tuvastamise tõenäosus;
T radari ülevaatuse perioodi kohta,
ja sihtmanöövri tuvastamise hetkel silutakse laagrisignaali üks kord filtri võimendustega a ja b seostest (1) ja (2), väärtusega r seostest. 
kus P l. O. m manöövri valetuvastuse tõenäosus ning järgnevates silumistsüklites silutakse trajektoori parameetreid filtri võimenduskoefitsientidega, mille väärtused vastavad jooksva silumistsükli järgmistele numbritele, mis määratakse seose põhjal. 


![]()

kus i 0, 1, 2, tsükli number pärast manöövri tuvastamist;
paigaldatud filtrimälu sihtoleku müra tõttu;
m ja m filtri võimendusest sihtmanöövri sooritamise hetkel.
Radariteabe esialgse töötlemise tulemusena võetakse automaatse jälgimise algoritmi sisendis vastu kaks sihtmärkide voogu:
"tõelised sihtmärgid", mis on rühmitatud sihtmärkide tegeliku asukoha lähedale;
"valesihtmärgid", millest üks osa on seotud kohalike objektide häirete ja peegelduste piirkondadega ning teine on ühtlaselt jaotunud kogu jaama vaatealal.
Kui otsustatakse, et teatud märkide kogum, millest igaüks on saadud oma radariuuringul, kuulub samale trajektoorile, on järgmiseks ülesandeks selle trajektoori parameetrite hindamine, mis seisneb punktis 2.2 käsitletud parameetrite arvutamises. X 0 ,U 0 ,N 0 ,V x ,V y ,V H ,a x ,a y Ja a H. Kui algkoordinaatidena on kaks sihtmärki X 0 ,U 0 Ja N 0 aktsepteeritakse viimase märgi koordinaadid ja kiiruse komponendid V x , V y Ja V H arvutatakse samamoodi nagu automaatse trajektoori püüdmise puhul.
Suurema hulga märkide eristamisel on võimalik minna üle keerulisemale sihtmärgi liikumise mudelile ja siluda trajektoori parameetreid. Silumine toimub selleks, et vähendada radari sihtkoordinaatide mõõtmisel tekkivate vigade mõju jälgimise täpsusele. Kõige sagedamini on ACS-is sihtmärgi liikumise ja trajektoori parameetrite järjestikuse silumise lineaarne mudel.
Järjestikuse silumise meetodi olemus seisneb selles, et trajektoori parameetrite silutud väärtused järgmises k th o6zor määratakse silutud väärtuste põhjal, mis on saadud ( k-1) ülevaade ja viimase tulemused k tähelepanek. Olenemata tehtud vaatluste arvust kasutatakse järgmises arvutustsüklis ainult eelmist hinnangut ja uue vaatluse tulemust. Samal ajal vähenevad oluliselt nõuded mälumahule ja riistvara kiirusele.
Lõplikud avaldised asukoha ja kiiruse silumiseks k-ndas radariuuringus on järgmised:
Ja nendes valemites on selge, et silutud koordinaatide väärtus on võrdne hetkel ekstrapoleeritud summaga k- silutud koordinaatide vaatlused U* FE ja võetud koefitsiendiga k ekstrapoleeritud koordinaadi kõrvalekalded mõõtetulemusest.
Silutud kiiruse väärtus sisse k arvustus V * U K on silutud kiiruse summa V * U K-1 in ( k-1)-th ülevaade ja võetud koefitsiendiga k kiiruse juurdekasv, mis on proportsionaalne kõrvalekaldega.
U=U K- U CE.
N
 Riis.
Riis.
ja joonisel 2.5 on näidatud sihtmärgi trajektoorilõik, sihtmärgi tegelikud asukohad asukohahetkedel ja mõõtmistulemused. Sirgesegmendid kujutavad ACS-arvuti poolt arvutatud liikumistrajektoori, kui koordinaatide silumist ei teostata (iga uuringu kiiruse komponendid määratakse kahe viimase vaatluse tulemuste põhjal). Sihtmärk liigub kiirusvektori suunas. Koordinaatide võtmise hetkel arvutatakse kiiruse komponendid ümber, sihtmärgi hetkekoordinaadid ja liikumissuund muutuvad järsult. k Punktiirjoon joonisel 2.5 tähendab sihtmärgi silutud trajektoori, mis on arvutatud ACS-arvutis k-th ülevaade. Tulenevalt sellest, et silutud koordinaatide kordajad k ja U jäävad vahemikku 0...1, silutud algkoordinaat on intervallis U* CE... V * U K ja silutud kiirus on V * U K-1…
K. k-th ülevaade. Tulenevalt sellest, et silutud koordinaatide kordajad k On tõestatud, et sihtmärgi sirgjoonelise ühtlase liikumise korral on jälgimisvead minimaalsed, kui koefitsiendid

 (2.9)
(2.9)
Joonis 2.6 näitab sõltuvust k-th ülevaade. Tulenevalt sellest, et silutud koordinaatide kordajad k arvustuse numbrist k. Joonisel olevad graafikud näitavad, et koefitsiendid lähenevad asümptootiliselt nullile. Limiidis kl kSee tagab sihtmärgi jälgimise vigade täieliku kõrvaldamise. Praktikas esineb alati sihttrajektoori kõrvalekaldeid sirgest.
Seetõttu on koefitsientide väärtused k-th ülevaade. Tulenevalt sellest, et silutud koordinaatide kordajad k väheneb ainult teatud piirini.
Silumise mõju sihtmärgi jälgimise täpsusele saab kvalitatiivselt hinnata joonise 2.7 abil. Sirgjoonelise liikumise lõigus on silutud sihtkoordinaatide viga väiksem kui silumata: punktiirjoone lõigud asuvad tegelikule sihttrajektoorile lähemal kui pideva joone lõigud. Manööverdamisalas tekivad sihtmärgi liikumise tegeliku olemuse ja hüpoteetilise lahknevuse tõttu dünaamilised jälgimisvead. Nüüd määravad pidevate joonte segmendid sihtmärgi tegeliku asukoha täpsemalt kui punktiirjoonte segmendid.
Õhutõrje automatiseeritud juhtimissüsteemis mittemanööverdavate sihtmärkide saatmisel koefitsientide valik k-th ülevaade. Tulenevalt sellest, et silutud koordinaatide kordajad k toodetakse mitmel viisil: neid saab kas algväärtustest mõnele lõppväärtusele ümber arvutada või need jäävad muutumatuks kogu hooldusperioodi vältel. Viimasel juhul muutub optimaalne järjestikune silumine nn eksponentsiaalseks silumiseks. Sihtmanöövri saab tuvastada visuaalselt või automaatselt. Mõlemal juhul loetakse sihtmärk manööverdavaks, kui mõõdetud sihtkoordinaat erineb ekstrapoleeritust rohkem kui lubatud koordinaatide mõõtmisvigu.
Z
Riis. 2.6. Silumiskoefitsientide sõltuvus K-st.
Riis. 2.7. Silumistrajektoori parameetrite mõju sihtmärgi jälgimise täpsusele



Tavaliselt on praeguste (antud ajal ekstrapoleeritud) sihtkoordinaatide arvutamine ajastatud nii, et see langeks kokku indikaatoritele, sidekanalitele, teiste algoritmide mälutsoonidele jne teabe väljastamise hetkedega. Sihtkoordinaatide prognoositud väärtused arvutatakse kasutades valemid:

 (2.10)
(2.10)

Kus t y- teostusaeg, arvestatud praegusest hetkest t.
Tavaliselt t yõhusituatsiooni hindamisel seavad selle komandörid ja muude andmetöötlusülesannete lahendamisel loetakse ACS arvuti püsimälust.
Sihtmärgi jälgimise viimane etapp on uute märkide ja olemasolevate trajektooride korrelatsiooni probleemi lahendamine. See probleem lahendatakse õhuruumi alade matemaatilise värava meetodiga. Selle olemus seisneb võrduste täitmise masinkontrollis, mille abil tehakse kindlaks, et märk kuulub uuritavasse valdkonda. Sel juhul kasutatakse kõige sagedamini ristkülikukujulisi või ümmargusi strobe. Nende parameetrid on näidatud joonisel 2.8.
Lase X ah, U E - ekstrapoleeritud sihtkoordinaadid mingil ajahetkel t. Et teada saada, millised järgmises ülevaates saadud hinnetest on seotud antud trajektooriga, peate kontrollima tingimusi:
P
Riis. 2.8. Värava parameetrid
|X 1 -X E | X pp; | Y 1 -Y E | Y pp; (2.11)
kui kasutate ümmargust stroboksi -
(X i – X E) 2 + ( Y i – Y E) 2 R lk, (2,12)
Kus X leht, Y str - ristkülikukujulise stroobi mõõtmed;
R pp - ümmarguse stroobi suurus.
Kõigi võimalike “trajektoori-märgi” paaride loetlemise tulemusena tehakse igas ülevaates kindlaks, millised märgid jätkavad olemasolevaid ja millised algatavad uusi marsruute.
Sihttrajektooride jälgimise algoritmide kirjeldusest selgub, et õhuolukorra info töötlemine on väga töömahukas protsess, mis nõuab palju RAM-i ja ACS-arvuti kiirust.