Manevrarea unei ținte în plan orizontal se reduce la schimbarea cursului și a vitezei de zbor. Influența unei manevre a țintei aeriene în prima și a doua etapă a ghidării luptătorului folosind metoda „Manevră” se manifestă în moduri diferite.
Să presupunem că ghidarea este efectuată în prima etapă, când ținta aeriană și, respectiv, vânătorul se aflau în puncte. ÎN Și A (Fig. 7.9.), iar întâlnirea lor a fost posibilă la punctul S despre .
Orez. 7.9. Efectul manevrei țintei în plan orizontal
pe calea de zbor a unui luptător
Dacă ținta aeriană este în punctul respectiv ÎN curs şi timp manevrat t întors spre colţ w t , apoi pentru ca luptătorul să urmeze tangentă la arcul de viraj al celei de-a doua etape de ghidare, cursul său trebuie să se schimbe într-un unghi în același timp w și t . După ce ținta aeriană completează manevra, o întâlnire cu aceasta va deveni posibilă la punctul respectiv CU , iar lungimea traseului țintei aeriene până la punct se va schimba în DSc.
Dacă ne imaginăm că punctul de pornire al virajului se deplasează împreună cu TC, situat în raport cu acesta la același interval și distanță ca și luptătorul în momentul începerii virajului, atunci luptătorul este ghidat către acest punct folosind „Paralela”. Metoda de abordare. Dacă CC este la o distanță mare Inainte de de la un luptător, comparativ cu care intervalul eu și distanța de viraj preventivă Dupr poate fi neglijat, atunci în general proprietățile metodei „Manevră” sunt apropiate de proprietățile metodei „Abordare paralelă”.
La o întâlnire ulterioară a luptătorului cu o țintă (DSc > 0) o face să se îndepărteze de luptător (DΘ și > 0) , iar întoarcerea către luptător duce la o întâlnire mai devreme. Prin urmare, o măsură de contracarare a manevrei de curs a țintei, ca și în cazul ghidării folosind metoda „Abordare paralelă”, poate fi țintirea simultană a unor grupuri de luptători către aceasta din direcții diferite.
Pe măsură ce distanța până la TC scade, diferența dintre proprietățile metodei „Manevră” și proprietățile metodei „Abordare paralelă” devine din ce în ce mai evidentă. În timpul întoarcerii VT, luptătorul trebuie să se întoarcă la unghiuri din ce în ce mai mari, adică viteza sa unghiulară w crește.
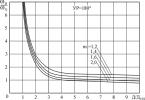
Modificarea valorii baghetă când un vânător zboară pe un curs de coliziune cu o țintă aeriană (UR = 180°) caracterizează graficul relaţiei dintre viteze unghiulare w și/w c din interval, exprimat în fracțiuni din distanța de viraj înainte D/Dupr.
După cum se poate vedea din grafic, la distanțe lungi (D/Dupr = 5÷ 10) atitudine w și/w c diferă ușor de unitate, adică viteza unghiulară a luptătorului diferă ușor de viteza unghiulară a țintei de manevră. Cu o scădere a intervalului, la aproximativ trei Super , valoarea lui wi crește intens, iar când luptătorul se apropie de punctul de plecare al virajului (D/Dupr = 1)w și crește la infinit.
Astfel, atunci când țintiți folosind metoda „Manevră” la un CC de manevră, este aproape imposibil să aduceți luptătorul în punctul în care începe virajul cu raza calculată.

Orez. 7.10. Dependența raportului vitezelor unghiulare w și/w c la manevrarea ţintei
la prima etapă de îndrumare în raport cu D/Dupr
În timpul procesului de ghidare din prima etapă, ținta aeriană poate manevra în mod repetat. Deci, de exemplu, o țintă aeriană într-un punct ÎN 1 poate porni luptătorul, rezultând un punct A1 trebuie întors de la cursul său anterior și trebuie schimbat direcția virajului planificat anterior. Ca urmare, traiectoria luptătorului în prima etapă de ghidare se transformă dintr-o linie dreaptă într-o linie complexă constând din arce de viraj cu rază variabilă și segmente drepte între ele. Toate acestea complică executarea unui zbor către o bătălie aeriană.
Vom lua în considerare influența unei manevre a țintei aeriene în a doua etapă a ghidării luptătorului folosind metoda „Manevră” folosind Figura 7.11:

Orez. 7.11. Efectul manevrei unei ținte aeriene în plan orizontal
în a doua etapă de ghidare folosind metoda „Manevră” pe traiectoria de zbor a luptătorului
Să presupunem că la un moment dat al celei de-a doua etape de ghidare luptătorul și, respectiv, ținta aeriană se află în punctele A Și ÎN și să îndeplinească ținta la punct Co luptătorul face o viraj cu o rază Ro și viteza unghiulară baghetă = Vi/ Ro .
Dacă pentru o anumită perioadă de timp Dt ținta aerian își va schimba direcția de zbor cu un unghi w × Dt , atunci întâlnirea cu ea va deveni posibilă în acel moment CU . Pentru a ajunge la acest punct dintr-un punct A luptătorul ar trebui să facă o viraj cu o rază diferită R . Dar în avans Dt ar trebui să dea în plus colțul w și D × Dt .
Astfel, manevra unei ținte aeriene în a doua etapă de ghidare duce la apariția unei viteze unghiulare suplimentare de viraj a luptătorului. w și D . Cu cât unghiul de rotire rămas este mai mic UR luptător, cu atât valoarea este mai mare w și D , iar pe măsură ce luptătorul se apropie de punctul final al virajului w și D crește la infinit.
Astfel, este aproape imposibil să aduceți luptătorul într-o poziție dată în raport cu o țintă aeriană de manevră în a doua etapă de ghidare folosind metoda „Manevră”.
În acest sens, în cazul manevrării unei ținte aeriene, în a doua etapă, de regulă, se trec la ghidarea luptătorului folosind metoda „Pursuit”.
O manevră a unei ținte urmărite, care depășește ca durată perioada de actualizare a informațiilor la intrarea VDU-ului, se manifestă prin apariția unei componente sistematice în erorile de filtrare dinamică.
Să luăm, ca exemplu, procesul de construire a unei traiectorii țintă care ajunge la un punct B(Fig. 12.15) s-a deplasat uniform și rectiliniu și apoi a început o manevră cu suprasarcină mare (1), medie (2) sau mică (3) (linii întrerupte și punctate). Pe baza evaluării parametrilor secțiunii drepte a traiectoriei pe baza rezultatelor filtrarii n măsurători (marcate cu un cerc în figură), coordonatele curente ale țintei (linia întreruptă) și coordonatele extrapolate la ( n+1)-a recenzie (triunghi).
| A |
| B |
După cum se poate observa din figură, după începerea manevrei, coordonatele curente ale țintei, emise consumatorilor, vor conține o eroare dinamică, a cărei amploare este mai mare, cu atât este mai mare suprasarcina țintei în timpul manevrei și perioada de vizualizare a spațiului.
Pentru a urmări automat o țintă în aceste condiții, este necesar, în primul rând, detectarea (identificarea) a unei manevre și, în al doilea rând, renunțând la ipoteza mișcării rectilinie și uniforme a țintei, determinarea parametrilor manevrei și, pe această bază, utilizarea o nouă ipoteză a mișcării țintei.
Există o serie de metode cunoscute pentru detectarea unei manevre bazate pe rezultatele măsurătorilor discrete ale coordonatelor țintei:
1. Motivul opririi filtrării conform ipotezei mișcării uniforme rectilinie poate fi excesul de modul rezidual al unei anumite valori constante. În acest caz, condiția necesară pentru continuarea filtrării după primire n Nota poate fi prezentată sub următoarea formă:
 ;
;  (1)
(1)
unde: Δ P, Δ D- constante care determină valoarea admisibilă a discrepanței și depind de perioada de revizuire a radarului și de valoarea acceptată a supraîncărcării țintei în timpul manevrei;
P n, D n- valorile de direcție și interval măsurate în al n-a sondaj;
, - valorile de orientare și interval extrapolate la momentul celei de-a n-a măsurători.
2. Cu cerințe mai mari pentru calitatea detectării manevrei în plan orizontal în condiții de urmărire a traiectoriilor într-un sistem de coordonate dreptunghiulare, la fiecare revizuire se determină valoarea admisibilă a discrepanței și se rezolvă problema astfel:
a) pe baza rezultatelor fiecărei măsurători de coordonate, se calculează modulele reziduale ale valorilor coordonatelor extrapolate și măsurate
 ;
; 
 ;
;
b) se calculează varianţa erorilor de măsurare discrete
unde σ D, σ P- erorile pătratice medii de măsurare discretă a intervalului și direcției;
c) se calculează varianţa erorilor de extrapolare
 ,
,

d) se calculează varianța erorii totale de măsurare și extrapolare a coordonatelor
| (5) |
e) se compară valorile dȘi  , unde este coeficientul ales din motive de asigurare a unei probabilități acceptabile de detecție falsă a unei manevre.
, unde este coeficientul ales din motive de asigurare a unei probabilități acceptabile de detecție falsă a unei manevre.
Dacă prin comparație se dovedește că d>  , atunci se ia decizia „așteaptă manevra”. Dacă inegalitatea este satisfăcută a doua oară, atunci se ia decizia de „manevră” și se oprește filtrarea parametrilor de traiectorie în funcție de ipoteza utilizată.
, atunci se ia decizia „așteaptă manevra”. Dacă inegalitatea este satisfăcută a doua oară, atunci se ia decizia de „manevră” și se oprește filtrarea parametrilor de traiectorie în funcție de ipoteza utilizată.
3. Se folosește și o altă abordare pentru alegerea unui criteriu de detectare a manevrei. În fiecare sondaj, se calculează funcția de autocorelare a reziduurilor de coordonate polare din sondajele anterioare și curente.
 ,
,

Dacă nu există manevră, atunci Δ D nşi Δ P n independent de la revizuire la revizuire și funcțiile de autocorelare ale reziduurilor sunt mici sau chiar zero. Prezența manevrei crește semnificativ așteptarea matematică a produsului reziduurilor. Decizia de a începe o manevră se ia atunci când funcțiile de autocorelare depășesc un anumit nivel de prag.
A DOUA ÎNTREBARE DE STUDIU: Urmărirea țintei în timpul manevrei.
În cel mai simplu caz, atunci când începerea unei manevre este detectată după (n+1)-a iradiere a țintei în două puncte - coordonatele estimate în sondajul n-a (cerc deschis) și coordonatele măsurate în ( n Al doilea sondaj (cerc solid) calculează vectorul viteză al țintei, care poate fi folosit pentru a calcula coordonatele curente și coordonatele extrapolate pe ( n+2)-a recenzie. Ulterior, coordonatele țintei măsurate în sondajele curente și anterioare sunt utilizate pentru a construi traiectoria țintei și pentru a calcula coordonatele extrapolate. Un filtru care funcționează folosind acest algoritm se numește extrapolator în două puncte.
Când se utilizează un astfel de extrapolator, abaterea coordonatelor extrapolate de la poziția adevărată a țintei ( L 1, L 2, L 3) cu o perioadă lungă de vizualizare și supraîncărcări mari ale țintei în timpul unei manevre pot fi destul de semnificative; în acest caz, coordonatele curente ale țintei vor fi date consumatorilor cu erori mari. Erorile mari de extrapolare pot duce la ca următorul marcaj țintă să fie în afara limitelor stroboscopului de urmărire automată. Deoarece există de obicei semne false în stroboscopul, unul dintre ele va fi selectat și utilizat pentru a continua traiectoria în direcția greșită, iar urmărirea automată a țintei adevărate va fi întreruptă.
În timpul unei manevre prelungite cu suprasarcină constantă, precizia urmăririi țintei poate fi mărită prin determinarea componentelor dreptunghiulare ale accelerației țintei de la primele trei semne obținute pe secțiunea curbată a traiectoriei și prin filtrarea în continuare a accelerației. Această problemă este rezolvată folosind "α-β-γ"- filtrul, al cărui algoritm recurent pentru estimarea coordonatelor și rata modificării acestora rămâne aceeași ca în "α-β"- filtrul și estimarea accelerației țintei, de exemplu, după coordonate X la primirea mărcii în n-a revizuire se calculează prin formula
Utilizare: în sisteme digitale automatizate pentru detectarea și procesarea informațiilor radar. Esența invenției: în măsurarea discretă radar a coordonatelor unei ținte aeriene, netezirea parametrilor actuali ai traiectoriei țintei cu o modificare a câștigurilor filtrului în funcție de probabilitatea acumulată a manevrei. Ceea ce este nou este instalarea coeficienților de câștig al filtrului în momentul în care ținta intră în zona de manevră posibilă, în funcție de probabilitatea acumulată de manevră. Creșterea preciziei de urmărire se realizează prin compensarea componentei dinamice a erorii de urmărire cauzată de manevra țintă. 3 bolnavi.
Invenția se referă la radar și poate fi utilizată în sistemele digitale automatizate pentru detectarea și procesarea informațiilor radar. Sunt cunoscute metode și dispozitive de urmărire a unei ținte aeriene de manevră, bazate pe măsurători radar discrete ale coordonatelor și evaluarea curentă (netezire și extrapolare) a parametrilor traiectoriei acesteia (coordonate și rate de schimbare) În ipoteza că în timpul perioadei de observare ținta va efectuați o singură manevră deliberată de intensitate mare, cu Când se detectează o manevră, memoria filtrului de netezire recurent este minimizată. În acest caz, deși eroarea dinamică de netezire, cauzată de discrepanța dintre ipoteza despre gradul polinomului care descrie traiectoria adevărată a țintei de manevră și ipoteza liniară a mișcării acestuia, este compensată, componenta aleatorie a erorii de netezire capătă o valoare maximă pentru o precizie dată a măsurării coordonatelor, iar eroarea totală crește. Dintre metodele cunoscute de urmărire a unei ținte aeriene de manevră, cea mai apropiată de cea propusă în ceea ce privește esența tehnică și efectul obținut este o metodă în care manevra este identificată pe baza unei analize a mărimii abaterii valorilor curente. a parametrilor traiectoriei urmărite din valorile lor măsurate și comparând această abatere cu o valoare de prag atunci când manevra este identificată, se netezește parametrii de traiectorie cu coeficienți de câștig de filtru egali cu unitatea Datorită faptului că la netezirea parametrilor de traiectorie; se ține cont doar de prezența unei manevre, erorile de netezire cu această metodă rămân destul de mari. Scopul invenţiei este acela de a îmbunătăţi acurateţea urmăririi unei ţinte aeriene de manevră care zboară joasă. Acest lucru se realizează prin faptul că, în metoda de urmărire a unei ținte aeriene de manevră cu zbor joasă, bazată pe măsurarea discretă a coordonatelor radar și netezirea parametrilor traiectoriei țintei folosind un filtru, în secțiuni de mișcare în linie dreaptă cu câștiguri ale filtrului determinate de zgomotul stării țintă, care sunt determinate din relațiile de rezemare, în funcție de viteza de schimbare a lagărului, și de modificarea coeficienților de câștig al filtrului în secțiunile de manevră țintă, în momentul intrării în secțiunea de traiectorie în care, conform informațiilor a priori despre caracteristicile traiectoriei, manevra este posibilă, semnalul lagărului țintei este netezit cu factori de amplificare a filtrului setați în funcție de probabilitatea acumulată a țintelor însoțite de manevră: P n = 1/(N-n+1) , unde N este numărul de măsurători în zona unei posibile manevre și n este numărul ciclului de netezire în zona unei posibile manevre, din rapoartele pentru rulment (p n) + -1 (1) pentru rata de schimbare a rulmentului (P n) - , unde a + 2 (2) r  (3) unde este varianța erorilor de măsurare a rulmenților; a este accelerația maximă a țintei de-a lungul lagărului în timpul manevrei; P om probabilitatea detectării corecte a manevrei; T este perioada de revizuire a radarului, iar în momentul în care este detectată manevra țintă, semnalul de lagăr este netezit o dată cu coeficienți de câștig filtru și , din relațiile (1) și (2) cu valoarea r din relația r (4) unde R este probabilitatea detectării false a unei manevre, iar pe În ciclurile de netezire ulterioare, parametrii traiectoriei țintei sunt netezați cu coeficienți de câștig filtru, care sunt determinați din relațiile
(3) unde este varianța erorilor de măsurare a rulmenților; a este accelerația maximă a țintei de-a lungul lagărului în timpul manevrei; P om probabilitatea detectării corecte a manevrei; T este perioada de revizuire a radarului, iar în momentul în care este detectată manevra țintă, semnalul de lagăr este netezit o dată cu coeficienți de câștig filtru și , din relațiile (1) și (2) cu valoarea r din relația r (4) unde R este probabilitatea detectării false a unei manevre, iar pe În ciclurile de netezire ulterioare, parametrii traiectoriei țintei sunt netezați cu coeficienți de câștig filtru, care sunt determinați din relațiile
Unde
(n) (n)
n= int 
m și m sunt câștigurile filtrului în momentul în care este detectată manevra țintă. Metodele cunoscute de urmărire a unei ținte aeriene de manevră care zboară jos nu au caracteristici similare cu caracteristicile care disting metoda propusă de prototip. Prezența unei secvențe de acțiuni nou introduse face posibilă creșterea preciziei urmăririi datorită informațiilor a priori despre traiectoria urmăririi unei ținte aeriene și, prin urmare, reducerea la minimum a erorilor de urmărire care apar atunci când manevra țintei este ratată. În consecință, metoda revendicată îndeplinește criteriile de „Noutate” și „Etap inventiv”. Posibilitatea de a obține un efect pozitiv din metoda propusă cu caracteristici nou introduse se datorează compensării influenței erorii de extrapolare dinamică a rulmentului, determinată de manevra țintă ratată de detectorul de manevră, prin modificarea câștigurilor filtrului în conformitate cu probabilitatea acumulată a manevrei. În fig. 1 prezintă o diagramă a manevrei țintei; în fig. 2 grafice care ilustrează eficacitatea metodei propuse; în fig. Figura 3 prezintă o schemă bloc electrică a dispozitivului pentru implementarea metodei propuse. Deoarece orice țintă aeriană de mare viteză care zboară la joasă viteză care apare brusc și este detectată, de exemplu, pe o navă de transport radar, va fi clasificată ca atacantă, este rezonabil să presupunem că această țintă se va întoarce cel mai probabil către navă, efectuând un manevra de orientare. Cu alte cuvinte, pentru a lovi o navă la un anumit moment în timp, o țintă aeriană de mare viteză care zboară joasă trebuie să efectueze o manevră, în urma căreia parametrul de direcție al țintei în raport cu nava trebuie să devină egal cu zero. În acest sens, presupunerea unei manevre obligatorii a țintei este fundamental justificată. În viitor, vom lua în considerare o rachetă de croazieră antinavă (ASCM) care efectuează o manevră de orientare ca țintă aeriană. Metoda se bazează pe utilizarea caracteristicilor de traiectorie ale sistemului de rachete antinavă la secțiunea finală a traiectoriei. Traiectoria rachetei antinavă (vezi Fig. 1) la o distanță de țintă mai mică de 30 km include trei secțiuni caracteristice ale traiectoriei: o secțiune dreaptă înainte de începerea manevrei de orientare a rachetei antinavă; zona de posibilă manevră de orientare; secţiune dreaptă a traiectoriei după finalizarea manevrei de orientare. Se știe că manevra de orientare a rachetelor antinavă, de exemplu, de tip „Harpoon”, se efectuează la distanțe față de nava țintă de 5, 3, 20, 2 km. Se poate presupune că la distanțe mai mari de 20,2 km, probabilitatea de manevră este aproape de zero, iar necesitatea de a limita câștigurile filtrului se datorează doar prezenței zgomotului în starea țintă. În absența datelor a priori cu privire la metoda de tragere a rachetelor antinavă utilizate de inamic în această situație tactică specifică, există motive să presupunem că începerea unei manevre de orientare este la fel de probabilă în orice moment când racheta antinavă. se află în intervalul de distanțe de la navă D min 5,3 km și D max 20,2 km . Racheta acoperă intervalul de rază specificat în
t 1 = 50 s unde V 290 m/s viteza de zbor PCR. În consecință, se poate presupune că, în timpul în care racheta antinavă se află la o distanță de navă, permițându-i să înceapă manevra de orientare, se vor face N N +1 + 1 măsurători ale coordonatelor sale. Deoarece o manevră poate începe cu probabilitate egală la orice interval de interviu, probabilitatea unui eveniment constând din începutul unei manevre la al n-lea interval (n 1, 2,) este a priori egală cu
P
Dacă începutul manevrei nu este detectat la (n-1)a dimensiune de coordonată, atunci probabilitatea acumulată a manevrei la a n-a dimensiune este determinată de relația
P=
Dependența dispersiei de accelerație a rachetei antinavă în timpul unei manevre de probabilitatea acumulată poate fi exprimată după cum urmează:
2 a = (1+4P n)(1-P ohm) (5) unde a este accelerația maximă a sistemului de rachete antinavă de-a lungul lagărului în timpul manevrei (3,5g);
P om probabilitatea detectării corecte a manevrei. Cunoscând dispersia accelerației PCR (a) și, de asemenea, presupunând că valorile erorilor de măsurare a rulmentului sunt cunoscute, este posibil să se calculeze valorile coeficienților de câștig al filtrului care sunt optime pentru rapoartele curente. a dispersiei erorilor de măsurare a coordonatelor, a accelerației care perturbă lagărul și a perioadei de vizualizare a radarului: prin lagăr
(P n) (6) prin rata de schimbare a lagărului (P n) unde o 2 este varianța erorilor de estimare a lagărului;
variația erorii de măsurare a rulmentului;
R este coeficientul de corelație dintre erorile de estimare a rulmentului și rata modificării acestuia. Valorile lui o și R o sunt determinate de următoarele relații
2 o = + -1
R o = (7)
Înlocuind în relația (7) relațiile (2) și (3), obținem dispersia erorilor de estimare a rulmentului și coeficientul de corelație a erorilor de estimare a rulmentului și rata modificării acesteia și, substituind în expresia (6), se obține filtru câștiguri determinate de relația (1). Este evident că pe măsură ce pcr se apropie la fiecare revizuire, probabilitatea acumulată a manevrei crește, ceea ce determină o creștere a dispersiei accelerației p cr și, în consecință, atrage după sine o creștere a câștigurilor filtrului și . Când este detectată o manevră, probabilității acumulate a manevrei i se atribuie valoarea „unu”, iar dispersia accelerației PCR este calculată după cum urmează:
= a 2 (1-P resturi) (8) unde P resturi este probabilitatea detectării false a unei manevre. În acest caz, r este calculat din relația (4), câștigurile filtrului capătă valoarea maximă. Având în vedere durata scurtă a manevrei PCR (1,3 s), este suficientă o netezire cu factori de câștig măriți (acest lucru este confirmat de rezultatele modelării prin simulare). Procedura de evaluare a probabilității de manevră se efectuează în intervalul de la 20,2 la 5,3 km. După detectarea unei manevre, câștigurilor filtrului de rulment li se atribuie valori determinate numai de zgomotul de stare țintă, câștigurile de interval rămân constante pe tot timpul de urmărire, iar valorile lor sunt selectate în conformitate cu zgomotul de stare țintă. În fig. Figura 3 prezintă un dispozitiv de urmărire automată a unei ținte aeriene de manevră care implementează metoda propusă. Acesta conține un senzor de coordonate măsurate 1, un bloc de netezire 2, un bloc de extrapolare 3, un prim bloc de întârziere 4, un bloc de memorie 5, un bloc de detectare a manevrelor 6, un bloc de comparație 7, un al doilea bloc de întârziere 8, un bloc 9 pentru calcularea câștigurilor filtrului. Dispozitivul pentru urmărirea automată a țintei de aer de manevră constă dintr-un senzor conectat în serie 1 coordonate măsurate, a cărui intrare este intrarea dispozitivului, ieșirea coordonatelor măsurate a senzorului 1 este conectată la prima intrare a blocului de netezire 2 iar la prima intrare a blocului de detectare a manevrei 6, ieșirea blocului de netezire 2 conectată la intrarea blocului de extrapolare 3, prima ieșire a blocului de extrapolare 3 este conectată la intrarea blocului de comparație 7 și prin intermediul blocul de întârziere 4 la a 4-a intrare a blocului de netezire 2 și la a 2-a intrare a blocului de detectare a manevrei 6, a doua ieșire a extrapolării blocului 3 este ieșirea dispozitivului, ieșirea blocului de detectare a manevrei 6 este conectată la A doua intrare a blocului de calcul a câștigului filtrului 9 și prin blocul de întârziere 8 la a doua intrare a blocului de memorie 5 și la a treia intrare a blocului de calcul a câștigului filtrului 9, ieșirea blocului Comparația 7 este conectată la prima intrare. a blocului de memorie 5 și prima intrare a blocului 9 pentru calcularea câștigurilor filtrului, ieșirea blocului de memorie 5 este conectată la a doua intrare a blocului de netezire 2, ieșirea blocului 9 pentru calcularea câștigurilor filtrului este conectată la al treilea bloc de intrare 2 netezire. Dispozitivul funcționează după cum urmează. Semnalul video al n-lea ciclu curent de măsurare a coordonatelor țintei urmărite de la ieșirea dispozitivului de recepție este furnizat la intrarea dispozitivului de urmărire și, în consecință, la senzorul 1 al coordonatelor măsurate. Senzorul de coordonate măsurat 1 convertește semnalul video din formă analogică în formă digitală, selectează semnalul util și măsoară valorile coordonatelor: orientare (П n) și interval (D n). Senzorul de coordonate măsurate 1 poate fi implementat conform uneia dintre schemele cunoscute ale unui detector automat de țintă de aer. Valorile coordonatelor țintă măsurate (P n și D n) sub formă de coduri de semnal sunt furnizate la prima intrare a blocului de netezire 2, care implementează operația de procesare a coordonatelor după cum urmează: cu n 1, estimarea curentă a coordonatelor tinta este
= M n, unde M n = П n, D pentru n 2, estimarea curentă a parametrilor traiectoriei țintă este egală cu
= M n , V= (M n-1 -M n)/T o unde T este perioada de revizuire radar; pentru n>2, estimarea curentă a parametrilor traiectoriei țintă este egală cu
= +(M)
= +(M)/T unde și sunt coeficienți de ponderare (câștiguri filtru);
și estimări ale coordonatelor și rata modificării acestora extrapolate la un studiu. Din blocul 2, valorile netezite ale coordonatelor și rata modificării acestora sunt furnizate la intrarea blocului de extrapolare 3. Blocul de extrapolare 3 generează estimări ale parametrilor de traiectorie extrapolați la un moment dat:
= +VT e; = unde T e este valoarea specificată a intervalelor de timp de extrapolare. În acest dispozitiv T e T o, T e T tsu. În acest caz, valorile coordonatelor extrapolate în timp de la prima ieșire sunt furnizate prin blocul de întârziere 4 către a patra intrare a blocului de netezire 2, unde sunt utilizate pentru a calcula parametrii traiectoriei în ciclul următor și către A 2-a intrare a blocului de detectare a manevrei 6, de unde sunt scazute din valorile de rulment măsurate furnizate la prima intrare a unității de detectare a manevrei 6 din senzorul de coordonate măsurate 1, iar diferența rezultată este comparată cu pragul după cum urmează:
P n ->
Valorile pragului sunt selectate în funcție de probabilitatea necesară de detectare falsă a unei manevre. Din aceeași ieșire, coordonatele extrapolate sunt trimise la intrarea blocului de comparație 7, unde valorile intervalului extrapolat sunt comparate cu intervalul de manevră posibilă de la 5,3 la 20,2 km. Valorile coordonatelor extrapolate la timpul T e sunt furnizate la a doua ieșire a blocului de extrapolare 3 (ieșire dispozitiv) și sunt utilizate pentru a genera și a emite date de desemnare a țintei către consumatori. În blocul de comparație 7, este generat un semnal logic dacă valoarea intervalului extrapolat se află în domeniul de valori posibile, care de la ieșirea blocului de comparație 7 este furnizat la prima intrare a blocului de memorie 5, interzicând în același timp eliberarea câștigurilor de filtru către blocul de netezire 2, în același timp, același semnal este furnizat la prima intrare a blocului 9 pentru calcularea câștigurilor de filtru și inițiază ieșirea câștigurilor către blocul 2 pentru netezire. Dacă valorile intervalului extrapolat nu se încadrează în intervalul de interval al unei posibile manevre, atunci se generează un semnal logic zero, interzicând emiterea factorilor de câștig din blocul 9 pentru calcularea câștigurilor filtrului și inițierea emiterii factorilor de câștig din bloc de memorie 5. Blocul de memorie 5 stochează câștigurile filtrului, ale căror valori sunt determinate de zgomotul stării țintă. În blocul 9 pentru calcularea câștigurilor filtrului, câștigurile sunt calculate în cazul sosirii unui semnal logic și al absenței unui semnal de detectare a manevrei conform relațiilor (1), (2) și (3), iar în caz de sosire a unui semnal de „manevră detectată” conform relațiilor (1) , (2) și (4). În blocul 6, un semnal „detectat de manevră” este generat și trimis la blocul 9 pentru calcularea câștigurilor filtrului, același semnal este trimis la blocul de întârziere 8 și, întârziat cu o perioadă de revizuire, este trimis la blocurile 5 și 9 de memorie și calcul. a câștigurilor filtrului. Eficacitatea metodei propuse a fost evaluată folosind modelarea prin simulare cu următoarele date inițiale:
Raza de lansare a sistemului de rachete antinavă de tip harpon este de 100 km;
Suprasarcină RCC în timpul manevrei 4 g;
Durata manevrei 4 s;
Perioada de revizuire radar 2s;
Manevra începe între 13 și 14 recenzii. În fig. Figura 2 arată dependența erorii de extrapolare a coordonatelor normalizate per sondaj de numărul de măsurători, unde:
1 metoda propusa;
2 metoda cunoscuta. La implementarea metodei propuse, precizia extrapolării coordonatelor se dublează.
Revendicare
METODA DE URMĂRIRE A ȚINTEI AERIENE DE MANEVRĂ, bazată pe măsurarea discretă a coordonatelor radar, netezind parametrii traiectoriei țintei folosind un - - filtru în secțiuni de mișcare în linie dreaptă cu coeficienți amplificator de filtru determinati de zgomotul stării țintei, care sunt determinată din relaţiile: prin purtare ![]()
unde j este ciclul de netezire curent;
prin viteza de schimbare a rulmentului
și modificarea coeficientului de câștig al filtrului în secțiunile de manevră țintă, caracterizată prin aceea că, în momentul intrării în secțiunea de traiectorie, în care este posibilă o manevră pe baza informațiilor a priori despre caracteristicile traiectoriei țintei, semnalul de rezemare a țintei este netezit cu câștigul filtrului coeficienți stabiliți în funcție de probabilitatea acumulată de manevră a țintei urmărite;
Pn(Nn+1),
unde N este numărul de măsurători în zona de manevră posibilă;
n numărul ciclului de netezire în secțiunea de netezire în secțiunea de manevră posibilă din relațiile de lagăr (1)
prin viteza de schimbare a rulmentului (2) ![]()
![]()

unde 2 este varianța erorilor de măsurare a rulmenților;
a accelerația maximă a țintei în funcție de rezemare în timpul manevrei;
P o. m probabilitatea detectării corecte a manevrei;
T despre perioada de revizuire radar,
iar în momentul detectării manevrei țintă, semnalul de lagăr este netezit o dată cu câștigurile filtrului a și b din relațiile (1) și (2), cu valoarea r din relația. 
unde P l. O. m probabilitate de detectare falsă a unei manevre, iar în ciclurile de netezire ulterioare parametrii de traiectorie sunt neteziți cu coeficienți de câștig de filtru, ale căror valori corespund numerelor ulterioare ale ciclului de netezire curent, care sunt determinate din relația 


![]()

unde i 0, 1, 2, numărul ciclului după detectarea manevrei;
memorie de filtru instalată din cauza zgomotului stării țintă;
m şi m din câştigul filtrului în momentul manevrei ţintei.
Ca rezultat al prelucrării inițiale a informațiilor radar, sunt primite două fluxuri de mărci de țintă la intrarea algoritmului de urmărire automată:
„ținte adevărate”, grupate lângă poziția reală a țintelor;
„ținte false”, dintre care o parte este legată de zonele de interferență și reflexii de la obiectele locale, iar cealaltă este distribuită uniform în zona de vizionare a stației.
Dacă se decide că un anumit set de mărci primite de fiecare în sondajul său radar aparține aceleiași traiectorii, atunci următoarea sarcină este estimarea parametrilor acestei traiectorii, care constă în calcularea parametrilor discutați în paragraful 2.2. X 0 ,U 0 ,N 0 ,V X ,V y ,V H ,A X ,A yȘi A H. Dacă există două marcaje țintă ca coordonate inițiale X 0 ,U 0 Și N 0 sunt acceptate coordonatele ultimului marcaj și componentele vitezei V X , V yȘi V H sunt calculate în același mod ca și pentru captarea automată a traiectoriei.
Când distingeți un număr mai mare de semne, este posibil să treceți la un model mai complex de mișcare a țintei și să neteziți parametrii traiectoriei. Netezirea se efectuează pentru a reduce influența erorilor în măsurarea coordonatelor țintei radar asupra preciziei de urmărire. Cel mai adesea în ACS există un model liniar al mișcării țintei și netezirea secvențială a parametrilor traiectoriei.
Esența metodei de netezire secvenţială este că valorile netezite ale parametrilor traiectoriei în următorul k se determină din valorile netezite obținute în ( k-1) revizuire și rezultatele ultimei k a-a observație. Indiferent de numărul de observații efectuate, în următorul ciclu de calcul se utilizează doar estimarea anterioară și rezultatul noii observații. În același timp, cerințele pentru capacitatea de stocare și viteza hardware sunt reduse semnificativ.
Expresiile finale pentru netezirea poziției și vitezei în sondajul radar k-a sunt următoarele:
Și în aceste formule este clar că valoarea coordonatei netezite este egală cu suma extrapolată în momentul de față k- observarea coordonatelor netezite U* FE și luate cu coeficient k abateri ale coordonatei extrapolate de la rezultatul măsurării.
Valoarea vitezei netezite în k recenzia V * U K este suma vitezei netezite V * U K-1 in ( k-1)-a revizuire și luate cu coeficient k creșterea vitezei care este proporțională cu abaterea.
U=U K- U CE.
N
 Orez. 2.5. Netezirea parametrilor traiectoriei țintei.
Orez. 2.5. Netezirea parametrilor traiectoriei țintei.
Linia punctată din Fig. 2.5 înseamnă traiectoria netezită a țintei, calculată în computerul ACS în k-a recenzie. Datorită faptului că coeficienţii coordonatelor netezite kși k se află în intervalul 0...1, coordonata inițială netezită este în interval U* CE... U K, iar viteza netezită este V * U K-1… V * U K.
S-a dovedit că, cu mișcarea uniformă rectilinie a țintei, erorile de urmărire vor fi minime dacă coeficienții kși k sunt calculate folosind formulele:

 (2.9)
(2.9)
În figura 2.6 este prezentată dependenţa kși k din numărul recenziei k. Graficele din figură arată că coeficienții se apropie asimptotic de zero. În limita la kAcest lucru asigură eliminarea completă a erorilor de urmărire a țintei. În practică, există întotdeauna abateri ale traiectoriei țintei de la o linie dreaptă.
Prin urmare, valorile coeficienților kși k scade doar la anumite limite.
Efectul netezirii asupra acurateții urmăririi țintei poate fi evaluat calitativ folosind Fig. 2.7. În secțiunea de mișcare în linie dreaptă, eroarea coordonatelor țintei netezite este mai mică decât a celor nenetezite: segmentele de linie punctată sunt situate mai aproape de traiectoria țintei adevărate decât segmentele de linie continuă. În zona de manevră, din cauza discrepanței dintre adevărata natură a mișcării țintei și cea ipotetică, apar erori de urmărire dinamică. Acum, segmentele de linii continue determină mai precis poziția reală a țintei în comparație cu segmentele de linii punctate.
În sistemul de control automat de apărare aeriană, la însoțirea țintelor fără manevră, alegerea coeficienților kși k produse în diferite moduri: pot fi fie recalculate de la valori inițiale la unele finale, fie rămân neschimbate pe toată perioada de întreținere. În acest din urmă caz, netezirea secvențială optimă se transformă în așa-numita netezire exponențială. Detectarea manevrei țintei se poate face vizual de către operator sau automat. În ambele cazuri, ținta este considerată a fi manevrabilă dacă coordonatele țintei măsurate diferă de cea extrapolată cu o sumă care depășește erorile admisibile de măsurare a coordonatelor.
Z
Orez. 2.6. Dependența coeficienților de netezire de K.
Orez. 2.7. Influența parametrilor traiectoriei de netezire asupra preciziei urmăririi țintei



De obicei, calculul coordonatelor țintă curente (extrapolate la un moment dat) este temporizat pentru a coincide cu momentele de ieșire a informațiilor către indicatori, canale de comunicare, zone de memorie ale altor algoritmi etc. Valorile prezise ale coordonatelor țintă sunt calculate folosind formulele:

 (2.10)
(2.10)

Unde t y- timpul de livrare, socotit din momentul curent t.
De obicei t y la evaluarea situației aeriene, se stabilește de către comandanți, iar la rezolvarea altor sarcini de prelucrare a datelor, se citește din memoria permanentă a computerului ACS.
Etapa finală a urmăririi țintei este rezolvarea problemei corelării semnelor care apar nou cu traiectorii existente. Această problemă este rezolvată prin metoda de închidere matematică a zonelor spațiului aerian. Esența sa constă în verificarea automată a îndeplinirii egalităților, cu ajutorul căreia se stabilește că marca aparține domeniului studiat. În acest caz, cel mai des sunt folosite stroboscopii dreptunghiulare sau circulare. Parametrii acestora sunt prezentați în Fig. 2.8.
Lăsa X Uh, U E - coordonatele țintei extrapolate la un moment dat t. Pentru a afla care dintre notele primite în următoarea revizuire se referă la o anumită traiectorie, trebuie să verificați condițiile:
P
Orez. 2.8. Parametrii porții
|X 1 -X E | X pp; | Y 1 -Y E | Y pp; (2,11)
atunci când utilizați un stroboscop circular -
(X i – X E) 2 + ( Y i – Y E) 2 R pp, (2,12)
Unde X pagină, Y str - dimensiunile stroboscopului dreptunghiular;
R pp - dimensiunea stroboscopului circular.
Ca urmare a enumerarii tuturor perechilor posibile „traiectorie-marcă”, în fiecare revizuire se stabilește care repere le continuă pe cele existente și care inițiază noi trasee.
Din descrierea algoritmilor de urmărire a traiectoriilor țintei, este clar că procesarea informațiilor despre situația aerului este un proces foarte laborios, care necesită multă memorie RAM și viteza computerului ACS.