Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- простой, дешевый, надежный драйвер.
К недостаткам:
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.

L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.

- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
Структурная схема L298N выглядит так.

Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.

Назначение выводов L298N.
| 1 | Sense A | Между этими выводами и землей подключаются резисторы - датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей. |
| 15 | Sense B | |
| 2 | Out 1 | Выходы моста A. |
| 3 | Out 2 | |
| 4 | Vs | Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 5 | In 1 | Входы управления мостом A. TTL совместимые уровни. |
| 7 | In 2 | |
| 6 | En A | Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста. |
| 11 | En B | |
| 8 | GND | Общий вывод. |
| 9 | Vss | Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 10 | In 3 | Входы управления мостом B. TTL совместимые уровни. |
| 12 | In 4 | |
| 13 | Out 3 | Выходы моста B. |
| 14 | Out 4 |
Предельно допустимые параметры L298N.
Параметры расчетов тепловых режимов.
Электрические характеристики драйвера L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания (вывод 4) | Vih+2.5 ...46 В |
| Vss | Питание логики | 4,5... 5 ...7 В |
| Is | Потребляемый ток покоя (вывод 4)
|
13 ... 22 мА |
| Iss | Потребляемый ток покоя (вывод 9)
|
24 ... 36 мА |
| Vil | Входное напряжение низкого уровня |
-0,3 ... 1,5 В |
| Vih | Входное напряжение высокого уровня (выводы 5, 7, 10, 12, 6, 11) |
2,3 ... Vss В |
| Iil | Входной ток низкого уровня (выводы 5, 7, 10, 12, 6, 11) |
-10 мкА |
| Iih | Входной ток высокого уровня (выводы 5, 7, 10, 12, 6, 11) |
30 ... 100 мкА |
| Vce sat (h) | Напряжение насыщения верхнего ключа
|
0,95...1,35...1,7 В |
| Vce sat (l) | Напряжение насыщения нижнего ключа
|
0,85...1,2...1,6 В |
| Vce sat | Общее падение напряжения на открытых ключах
|
|
| Vsens | Напряжение датчиков тока (выводы 1, 15) |
-1 ... 2 В |
| Fc | Частота коммутаций | 25 ... 40 кГц |
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.

Диаграмма работы этой схемы в полношаговом режиме выглядит так.

Если не используются разрешающие входы и датчики тока, схема выглядит так.


Электронные компоненты . Вы можете добавить в закладки.
Итак, задумывая драйвер на полевиках для биполярников, я и не думал что тема вызовет такой интерес и придется писать маленькую статью по сборке и настройке. Здесь будет рассматриваться драйвер как отдельный блок. Т.к. я использую блочную конструкцию. Т.е. три драйвера, интерфейсная плата, блок питания. Во первых при выходе из строя одного драйвера, просто меняется драйвер на запасной, а во вторых (и главное) планируется модернизация, мне проще снять один драйвер, и поставить модернизируемый вариант для обкатки. «Одноплатник» это уже развитие темы, и на вопросы по настройке ИБП я думаю с удовольствием ответит Dj _ smart , а также дополнит и поправит мой труд. А теперь к делу…
Пункт первый (набившим плату можно не читать J ). После травления, лужения, и сверловки, внимательно осмотрите всю плату на предмет косяков. Сопли, протравленные дорожки, и т.д. могут серьезно обломать весь кайф. Далее набиваем плату, сначала все перемычки, затем сопротивления, диоды, панели, емкости и биполярные транзисторы. Хочу обратить особое внимание на Ваше внимание, извините за… Не ленитесь перед впайкой проверить деталь на исправность. Прозвонка иногда спасает от дыма… Я зная цветовую кодировку резисторов на ура, подкалывался несколько раз, причем со спец. эффектами. Когда используешь резисторы из загашников которые годами выпаивались из всего что под руку попадет, забываешь, что при нагреве красный может стать оранжевым, а оранжевый - желтым… Впаиваем провода питания +5В, степ, GND , и провода контроля Vref . Примерно вот так это выглядит:

Пункт второй (настраиваем режимы работы и удержания). 555 я лично впаиваю в плату, кто поставил панель, значит втыкаем, блок индикации должен быть отключен. Подстроечники на середину. Вывод степ замыкаем на общий (раб. режим). Прозваниваем цепь +5В и если нет короткого, включаем питание. Тестер подключен к контрольным точкам Vref (молодец Dj _ smart , предусмотрел на плате), если номиналы подстроечников и сопротивления между ними соответствуют схеме, то подстроечником раб. режима можно регулировать напряжение около 0 - 1В т.е. ток 0 - 5А. Настроим на 1А. Тут все просто. R изм. у нас 0,2 Ом. Нам нужен 1А. 0,2х1=0,2В. Т.е. если мы установим Vref - 0,2В, ток в обмотке будет 1А. Если нам нужен ток в обмотке скажем 2,5А, то Vref =0,2х2,5=0,5В.
Короче мы выставили 0,2В.

Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:

Главное обратите внимание на обязательную задержку при переключении. При замыкании степ на общий, мгновенно должен включаться рабочий режим, а при размыкании уходить на удержание с задержкой 0.5с. Если задержки нет ищите проблемы, иначе при работе будут не хилые глюки. Если не заводится, идите в тему форума, не устраивайте пожаров J .
Пункт третий (настраиваем блок индикации). Печатка разведена под 315-361, как и у Dj _ smarta тоже мешок, надо куда то паять… Но в принципе туда можно паять любую пару, из наших я испытывал 502 - 503, 3102 - 3107, все пашет, только будьте внимательны с цоколевкой! Если все правильно впаяно и рабочее, то работает без проблем. Индикация вносит небольшую корректировку в Vref , так что после подключения индикации, окончательно отрегулируйте ток под свой ШД (лучше для начала 70% от номинального). Фотки как горят светодиоды делать не стал J .
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:

Либо на 16 ноге, он такой:

Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ!!! Это важно!!! Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы.
Пункт пятый. Опять выключаем питание и вставляем IR , впаиваем полевики. При использовании ШД с током обмотки более 2,5А, необходимо полевики вынести на радиатор. Обратите внимание при впайке диодов, они могут различаться по меткам. Мне правда не встречалось (у меня в перемешку 522 и 1 N 4148 (аналог) у них цоколевка совпадает) Но учитывая что людям IR
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод , с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель
это, как понятно из его названия, двигатель который вращается дискретными перемещениями
. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый
и микрошаговый режим
, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы
и старые матричные принтеры
. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297
и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref
надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298
, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298
сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
![]() В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
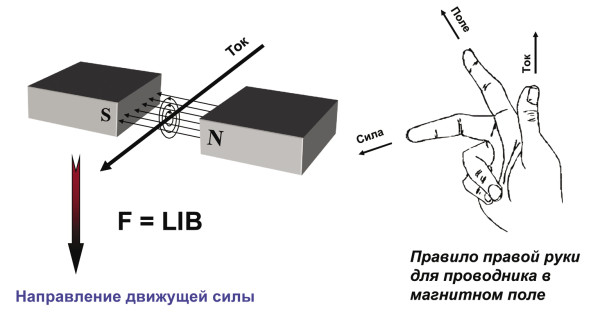
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.

Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
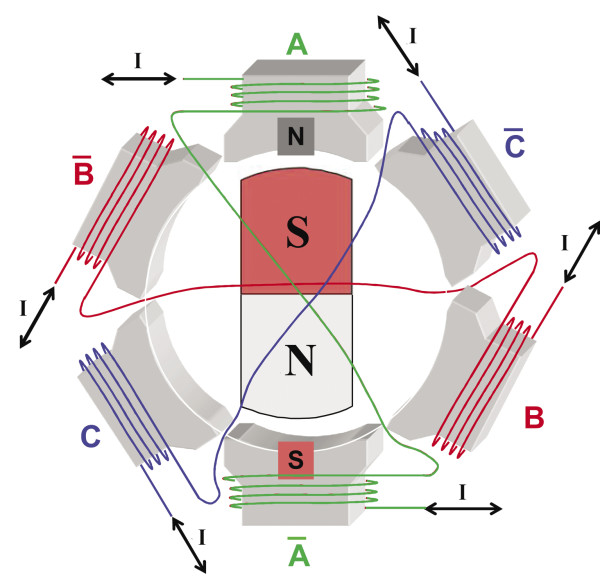
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).

Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.

Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.

Так, у интегрированного драйвера TI максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера этот показатель не превышает 37°С.

Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).

Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы , и . Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов , ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера для управления одним коллекторным двигателем.

Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.

Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.

Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать , про дайверы .
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.

Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер (транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно .
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе (сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе (сигнал ВКЛ не активен).
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку "–" в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.

Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.

Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить .
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).

То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть .
Схема контроллера с биполярным драйвером L298N выглядит так.
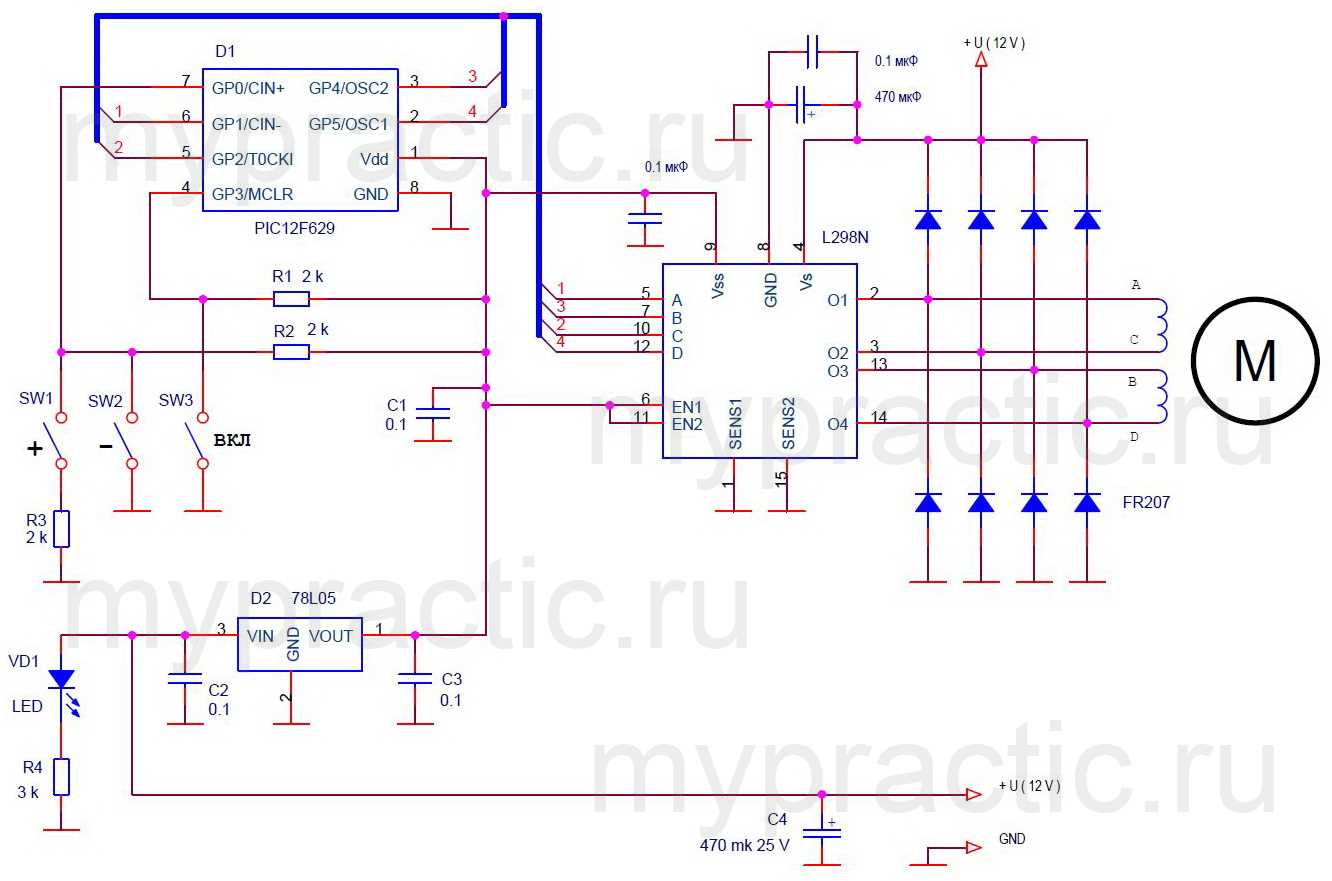
Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.

Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.

Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить .



