Технические характеристики Мицубиси Аутлендер определяются тремя вариантами используемых силовых установок. Две бензиновые «четверки» объемом 2.0 и 2.4 литра отдают 146 и 167 л.с. соответственно. На вершине моторной линейки располагается 3.0-литровый мотор V6, предусмотренный для версии Mitsubishi Outlander Sport. Он развивает максимальную мощность 230 л.с. и генерирует момент на уровне 292 Нм (при 3750 об/мин).
Топовая модификация Аутлендера предполагает установку в пару к силовому агрегату 6-ступенчатой автоматической коробки передач. Другие версии кроссовера оснащаются вариатором Jatco восьмого поколения с гидротрансформатором. Тандем из V6 230 л.с. и 6АКПП обеспечивает спортивной версии Outlander хорошую динамику – до 100 км/ч автомобиль разгоняется за 8.9 секунды. Вариант кроссовера, скрывающий под капотом любой из пары 4-цилиндровых агрегатов, не может похвастаться такой прытью, затрачивая на спурт до «сотни» больше 10 секунд.
Средний расход топлива Митсубиси Аутлендер варьируется от 7.3 до 8.9 литров. Самой «ненасытной», разумеется, является 3.0-литровая «шестерка», согласно паспортным данным потребляющая в городском цикле около 12.2 литров горючего.
Геометрические параметры кузова автомобиля интересны прежде всего равенством углов въезда и съезда, каждый их которых не превышает 21 градуса. Такое же значение имеет угол рампы. Дорожный просвет (клиренс) Mitsubishi Outlander составляет 215 мм.
Японский кроссовер выпускается в передне- и полноприводных модификациях. Передний привод предусмотрен только для версий с «младшим» 2.0-литровым мотором. Полный привод имеет две возможных конфигурации: All Wheel Control (AWC) и Super All Wheel Control (S-AWC). Второй вариант, добавляющий стабильности в скоростных поворотах и на скользких покрытиях, разработан специально для Outlander Sport 3.0.
Технические характеристики Mitsubishi Outlander – сводная таблица:
| Параметр | Outlander 2.0 CVT 146 л.с. | Outlander 2.4 CVT 167 л.с. | Outlander Sport 3.0 AT 230 л.с. | |
|---|---|---|---|---|
| Двигатель | ||||
| Тип двигателя | бензиновый | |||
| Тип впрыска | распределенный | |||
| Наддув | нет | |||
| Количество цилиндров | 4 | 6 | ||
| Расположение цилиндров | рядное | V-образное | ||
| Количество клапанов на цилиндр | 4 | |||
| Объем, куб. см. | 1998 | 2360 | 2998 | |
| Мощность, л.с. (при об/мин) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| Трансмиссия | ||||
| Привод | передний | полный (AWC) | полный (AWC) | полный (S-AWC) |
| Коробка передач | вариатор | 6АКПП | ||
| Подвеска | ||||
| Тип передней подвески | независимая типа МакФерсон | |||
| Тип задней подвески | независимая, многорычажная | |||
| Тормозная система | ||||
| Передние тормоза | дисковые вентилируемые | |||
| Задние тормоза | дисковые вентилируемые | |||
| Рулевое управление | ||||
| Тип усилителя | электрический | |||
| Шины и диски | ||||
| Размер шин | 215/70 R16 | 225/55 R18 | ||
| Размер дисков | 6.5Jх16 | 7.0Jх18 | ||
| Топливо | ||||
| Тип топлива | АИ-92 | АИ-95 | ||
| Объем бака, л | 63 | 60 | 60 | |
| Расход топлива | ||||
| Городской цикл, л/100 км | 9.5 | 9.6 | 9.8 | 12.2 |
| Загородный цикл, л/100 км | 6.1 | 6.4 | 6.5 | 7.0 |
| Смешанный цикл, л/100 км | 7.3 | 7.6 | 7.7 | 8.9 |
| Габаритные размеры | ||||
| Количество мест | 5 | |||
| Длина, мм | 4695 | |||
| Ширина, мм | 1800 | |||
| Высота (с рейлингами), мм | 1680 | |||
| Колесная база, мм | 2670 | |||
| Колея передних колес, мм | 1540 | |||
| Колея задних колес, мм | 1540 | |||
| Объем багажника (мин./макс.), л | 591/1754 | 477/1640 | ||
| Дорожный просвет (клиренс), мм | 215 | |||
| Масса | ||||
| Снаряженная, кг | 1425 | 1490 | 1505 | 1580 |
| Полная, кг | 1985 | 2210 | 2270 | |
| Максимальная масса прицепа (с тормозами), кг | 1600 | |||
| Динамические характеристики | ||||
| Максимальная скорость, км/ч | 193 | 188 | 198 | 205 |
| Время разгона до 100 км/ч, с | 11.1 | 11.7 | 10.2 | 8.7 |
Двигатели Мицубиси Аутлендер – технические характеристики
Все три доступных для кроссовера мотора оснащаются системой регулирования высоты подъема клапанов MIVEC. Она позволяет в зависимости от оборотов изменять режим работы клапанов (время открытия, перекрытие фаз), что способствует повышению мощности двигателя, экономии топлива, уменьшению вредных выбросов.
Характеристики двигателей Mitsubishi Outlander:
| Параметр | Аутлендер 2.0 146 л.с. | Аутлендер 2.4 167 л.с. | Аутлендер 3.0 230 л.с. |
|---|---|---|---|
| Код двигателя | 4B11 | 4B12 | 6B31 |
| Тип двигателя | бензиновый без турбонаддува | ||
| Система питания | распределенный впрыск, электронная система управления клапанами MIVEC, два распредвала (DOHC), привод ГРМ цепной | распределенный впрыск, электронная система управления клапанами MIVEC, один распредвал на каждый ряд цилиндров (SOHC), привод ГРМ ременный | |
| Количество цилиндров | 4 | 6 | |
| Расположение цилиндров | рядное | V-образное | |
| Количество клапанов | 16 | 24 | |
| Диаметр цилиндра, мм | 86 | 88 | 87.6 |
| Ход поршня, мм | 86 | 97 | 82.9 |
| Степень сжатия | 10:1 | 10.5:1 | |
| Рабочий объем, куб. см. | 1998 | 2360 | 2998 |
| Мощность, л.с. (при об/мин) | 146 (6000) | 167 (6000) | 230 (6250) |
| Крутящий момент, Н*м (при об/мин) | 196 (4200) | 222 (4100) | 292 (3750) |
Система полного привода Митсубиси Аутлендер
Система All Wheel Control (AWC) представляет собой переднеприводную конфигурацию, в которой задняя ось подключается с помощью управляемой электроникой электромагнитной муфты. Назад может направляться до 50 % тяги. Существует три режима работы привода AWC – ECO, Auto и Lock. В экономичном режиме весь крутящий момент по умолчанию передается на переднюю ось, а задняя задействуется только при пробуксовке. Режим Auto распределяет усилие оптимальным образом, исходя из получаемых электронным блоком данных (скорости колес, положения педали акселератора). Режим блокировки увеличивает количество передаваемого на задние колеса крутящего момента, что гарантирует уверенный разгон и более стабильное поведение на нестабильной поверхности. Главное отличие Lock от Auto заключается в том, что задние колеса изначально получают больше тяги независимо от того обнаружено ли проскальзывание или нет.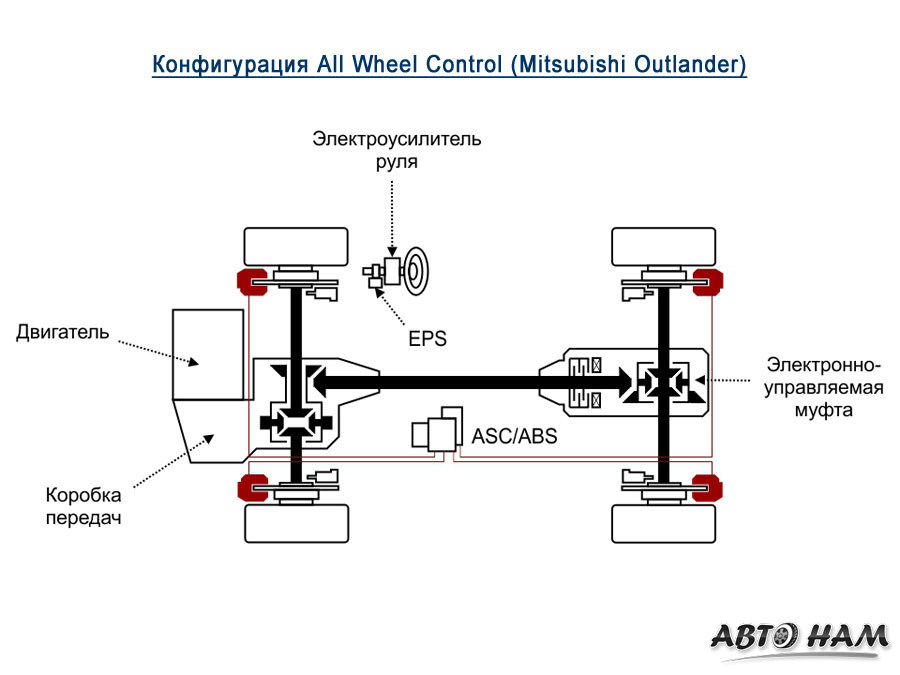
Система Super All Wheel Control (S-AWC) представляет собой продвинутую вариацию обычного AWC, в которой на передней оси устанавливается активный дифференциал (AFD), распределяющий усилие между колесами. Таким образом, появляется дополнительный маханизм контроля за поведением автомобиля. В работе S-AWC принимают участие система стабилизации, ABS, электроусилитель руля и тормозная система. Так, блок управления системой Super All Wheel Control при определенных условиях может инициировать подтормаживание колес, например, в случае возникновения сноса при прохождении виража.
Селектор выбора режима работы полного привода S-AWC имеет четыре позиции: Eco, Normal, Snow и Lock. Режим «Снег» оптимизирует настройки системы под езду по скользкому покрытию.
Пожалуй, всякий раз, когда мы видим слова "новый", "революционный", "не имеющий аналогов", нам хочется воскликнуть что-нибудь остроумное. Что-нибудь про велосипед и про изобретателей, про собак и количество конечностей ну или что-то не менее саркастичное. Здравый смысл, однако, подсказывает нам, что не так всё просто. Не всегда автомобили оборудовались системами электронной стабилизации, когда-то и ставшая ныне привычной ABS была внедрена в автомобиль впервые. А что сегодня? Отсутствие ABS вызывает зачастую недоумение, а ESP уже стала обязательным оборудованием для установки на все легковые авто в Канаде, США, а с недавних пор и в Европе. Так что же нового предлагают нам инженеры MMC? Давайте попробуем разобраться.
Строго говоря, аббревиатура S-AWC нам уже знакома. Впервые эта система была применена на легендарном Mitsubishi Lancer Evo X. И, тем не менее, представители Mitsubishi настаивают, что хотя "буквы те же", на новом Outlander всё устроено несколько иначе. И вообще, собственно S-AWC это не столько конкретное решение, набор агрегатов, сколько идеологическая концепция, суть которой, если отбросить мелочи, обеспечить автомобилю нейтральную поворачиваемость в тех условиях, когда развивается недостаточная или избыточная поворачиваемость, плюс обеспечить оптимальное сцепление ведущих колес с дорогой.
Каким же образом это достигается? На "Эволюшене" система состояла из следующих агрегатов:
Активный центральный дифференциал (ACD), в сущности являющийся электронно-управляемой гидравлической многодисковой муфтой, основная задача которой - распределение крутящего момента между осями плюс "мягкая, плавная блокировка" межосевого дифференциала для оптимизации передачи момента на переднюю/заднюю оси и обеспечение режима сбалансированного сцепления с дорогой с сохранением управляемости.
Активный контроль рысканья (AYC) управляет распределением момента между задними колесами для обеспечения стабильности при движении в кривой, а также может частично блокировать дифференциал для передачи момента на более "сцепленное" с дорогой колесо.
Активное управление устойчивостью (ASC) обеспечивает наилучшее сцепление колес автомобиля, "придушивая" при необходимости мотор и регулируя тормозные усилия на каждом колесе. Надо отметить, что необычность этой системы была в том, что ММС впервые внедрили датчики усилия в тормозную систему (в дополнение к стандартным для таких систем датчикам - акселерометру и датчику положения руля), что обеспечило систему более точными данными, а следовательно, более адекватной реакцией.
Ну и наконец, антипробуксовочная система (ABS) со спортивной настройкой. Система получает данные о скорости вращения каждого колеса плюс данные об угле передних колес и использует тормозную систему для растормаживания или, наоборот, подтормаживания каждого отдельного колеса.
А что же Outlander? Да, мы неслучайно так подробно рассмотрели компоненты системы S-AWC от Lancer Evo X, прежде чем перейти к новому кроссоверу. Тут инженеры компании не кривят душой, система на "Лансере" и на нашем автомобиле и правда конструктивно отличаются довольно сильно, в чем мы сейчас и убедимся. Итак, какие агрегаты относятся к новой системе полного привода в Outlander?

Активный передний дифференциал (AFD). Регулирует распределение крутящего момента между колесами передней оси.
Электроусилитель руля (EPS). Неслучайно отнесен к системе полного привода S-AWC. Его задача адаптивно компенсировать реактивные усилия на руле, возникающие при перераспределении момента на передних колесах, обеспечивая комфортное руление в условиях активной работы AFD
Электромагнитная муфта. Подключает заднюю ось, регулирует крутящий момент, передаваемый на заднюю ось.
Блок управления S-AWC. В отличие от обычных систем использует расширенный набор датчиков ускорения для определения направления движения автомобиля, а также угловой скорости и поперечных нагрузок.
В чем же отличие? Лично мне в глаза бросилось два, и довольно серьезных. На передней оси вместо дифференциала повышенного трения мы теперь имеем управляемый передний дифференциал с возможностью частичной блокировки и способностью распределять момент между колесами. Само собой, включение такой системы на ходу могло бы отразиться на управлении автомобилем не самым лучшим образом. Всю работу мы бы почувствовали на руле в виде реактивного усилия, на практике - рывков, причем не в самое удобное время, поскольку понятно, что система будет срабатывать тогда, когда условия для вождения, мягко говоря, неблагоприятные.
Но тут вступает в работу другая подсистема, а именно - электроусилитель руля. Он адаптирует усиление "на лету", компенсируя изменение реактивного усилия на руле в момент работы муфты активного переднего дифференциала. И всё это практически неощутимо для водителя и без потери управляемости.
Таким образом, мы имеем достаточный набор средств воздействия на поведение автомобиля, а всё остальное - в руках инженеров, программирующих и настраивающих для нас систему управления всем этим инструментарием. Что же нам дают?
А дают водителю четыре режима работы системы.
Mitsubishi Outlander 2,4 AT в максимуме Bortzhurnal Вся правда о «постоянном» полном приводе
Не так давно я написал здесь, как я застрял на своем квадроцикле.
Этот случай немного раздражал меня, и мне стало очень интересно, какой у меня был полный драйв, который я не мог выбраться из сугроба.
И я пошел в Google и читал форумы, и вот как я себе это представляю.
Полный привод разделен на две большие группы, постоянная полный и вставной .
Постоянный. это когда момент передается всем 4
колеса, например, мой джипара 🙂 из таких
Подключаемый модуль. это когда машина в основном имеет привод к одной оси, например, к передней оси, а когда ведущая ось скользит, она автоматически подключается до того, как она не активна (вы также можете включить ее с помощью кнопок, но обычно только на низкой скорости или в дерьме, t на некоторое время), подобная система на Out XL и подавляющее большинство современных внедорожников.
Меня, как вы понимаете, интересовали первый вид полноприводного, постоянного.
Оказывается, он делится на кучу разновидностей.
Читайте так же
Но сначала немного теории 🙂
Дифференциал. это механическое устройство, которое позволяет колесам вращаться с разной скоростью.
И это нужно сделать приблудой, потому что в поворотах колеса вращаются с разной скоростью, а чтобы сделать поворот более комфортным и не было износа резины, дифференциал позволяет распределить крутящий момент между этими колесами в разные пропорции.
В полноприводном автомобиле, например, в первом дифференциале Outlander первого поколения. Один для каждой оси. передняя и задняя оси, которые служат для распределения крутящего момента между колесами на соответствующих осях плюс межосевая ось, которая распределяет крутящий момент между осями.
Как работает полный привод Mitsubishi Outlander S-AWC
Работа полного привода Mitsubishi Outlander (на авто нет ESP).
Как работает полный привод Mitsubishi Outlander AWD на роликах
[email protected] www.diffblock.com vk.com/diffblock Mitsubishi Outlander 2013г.в. (2.4л 200л.с.). тестируем полный привод .
Таким образом, в моем Out, когда он стоит на ровной поверхности, момент распределяется в равных частях ко всем колесам, то есть на 25% (кстати, не везде так, в Subaru, например, по распределению осей, что по типу 90% на передней оси 10% на спине).
Читайте так же
Но засада заключается в том, что дифференциал большую часть времени переносит на менее загруженное колесо, и поэтому, когда одно колесо скользит или скользит, весь момент идет к нему, а остальные колеса неподвижны!
Чтобы этого не произошло, есть блокировки дифференциала. Который всегда может передавать равное время по оси и колесам.
И замки могут быть как один. межосевой, тогда момент передается равным обеим осям, но между колесами по осям распределяется на основе наименьшего сопротивления, поэтому с одним замком достаточно иметь два колеса, один задний и один передний стойло, чтобы машина могла встать.
И несколько. на оси плюса на каждой оси на каждом колесе, тогда машина будет крутиться, пока все колеса не застрянут 🙂
И здесь жесткий блокировка, то есть нажатием кнопки вы принудительно блокируете дифференциалы, и все колеса всегда дают равное время, это помогает в дерьме, а затем, хотя хотя бы одно колесо на твердой поверхности, с другой стороны, оно будет сильно вращаться нарушает контроль.
Есть также автоматический например, на мой Out с помощью viskomufty, который является своего рода мусором с желеобразной жидкостью внутри, при промахе, там что-то начинает свирепствовать там, жидкость внутри утолщается и между дифференциалом оси блокируется,
Но viskomufta сказать не самый удобный для внедорожного приблуда. он работает в течение длительного времени, и я понимаю, что он не передает честные 50% свободной оси.
И теперь мой случай, правый фронт, который я был в воздухе, и яростно повернулся, соответственно, в левый передний момент совсем не перевернулся, но на задней оси вискоймуфты он был смещен частью момента, но, видимо, это было недостаточно, чтобы задняя ось вытащила фронт из сугроба, поэтому, пока я не подорвал, я не мог сдвинуться с места.
В системе полного привода с электронным управлением предусмотрено три режима работы, которые можно выбирать вращением переключателя в зависимости от дорожных условий.
Режимы движения следующие.
Управление полноприводным автомобилем требует особых навыков вождения.
Внимательно прочтите раздел «Пользование системой полного привода» и придерживайтесь безопасной манеры вождения.
Выбор режима производится вращением переключателя при включенном зажигании.
- 4WD AUTO
- 4WD LOCK
В момент переключения режима движения новый режим отображается в информационном окне многофункционального дисплея, на некоторое время прерывая текущие показания.
Через несколько секунд на дисплее снова появляется предьщущее окно.
Предостережение
- Запрещается переключать режим движения в тот момент, когда передние колеса буксуют (например, в снегу). При этом возможен рывок автомобиля в непредсказуемом направлении.
- Движение по сухим дорогам с твердым покрытием в режиме 4WD LOCK приводит к повышенному расходу топлива и увеличению уровня шума.
- Не рекомендуется двигаться в режиме 2WD, если колеса пробуксовывают.
Это может привести к перегреву узлов и агрегатов трансмиссии.
Примечание
Режим движения можно переключать как на стоянке, так и во время движения.
Окно индикации появляется при включении зажигания, затем оно отображается в течение нескольких секунд после запуска двигателя.
На дисплее отображаются следующие окна индикации режима движения.
| Режим движения | ||
|---|---|---|
| Индикатор 4WD | Индикатор LOCK | |
| 2WD | ВЫКЛЮЧЕН | ВЫКЛЮЧЕН |
| 4WD AUTO | ВКЛЮЧЕН | ВЫКЛЮЧЕН |
| 4WD LOCK | ВКЛЮЧЕН | ВКЛЮЧЕН |
Предостережение

Самая распространенная схема «настоящего» полного привода использовалась практически на всех исходно-переднеприводных моделях. Здесь имеются три дифференциала, межосевой (размещенный, в зависимости от конкретной схемы, в картере КПП или картере раздаточной коробки) блокируется, а момент равномерно распределяется между осями. Этот принцип аналогичен.
- Плюсы - устойчивость на дороге, относительная предсказуемость поведения, неплохая проходимость и надежность.
- Минусы - недостаточный коэффициент блокировки вискомуфтой и скорость ее «срабатывания».
| Модель | Модификации |
| Lancer-Mirage-Libero | (CCxA*) hatch. 1991-1996, (CDxA) sed. 1991-1996, (CDxW) wag. 1992-1999 |
| Lancer-Mirage | (CLxA) 1996-2001 (hatchback), (CMxA) 1996-2000 (sedan) |
| Lancer | Evolution IV (CN9A) 1996.09-1998.02, AYC - опция для GSR |
| Lancer | Evolution V (CP9A) 1998.02-1999.01, AYC - опция для GSR99, ост. - LSD (RS/GSR99) |
| Lancer | Evolution VI (CP9A) 1999.01-2000.03, AYC для GSR2000 |
| Galant-Emeraude-Eterna | (E7xA, E8xA) 1992-1996 |
| Galant-Legnum | (ECxA, ECxW) 1996-2003 |
| Galant-Legnum | (EC5A/EC5W) VR-4 (AYC для всех) 1996-2002 |
| RVR | (N1xW/N2xW) 1991 - 1997.08 |
| RVR | (N6xW/N7xW) 1997.09 - 2003.01 |
| Chariot/Grandis | (N3xW/N4xW) 1992.06 - 1997.07 |
| Chariot/Grandis | (N8xW/N9xW) 1997.08 - 2002 |
| Diamante-Sigma | (F2xA) (sedan) 1990.05-1994.11 |
| Diamante | (F4xA) (sedan) 1994.12-2002.10 |
| GTO/3000GT | (Z1xA) 1990.10-2000.09 |
| Airtrek / Outlander | (CUxW) 2001.03-… |
[свернуть]
VCU
Раскрыть...
Постепенный отход от полноценного 4WD был поддержан всеми японскими автопроизводителями, не стала исключением и MMC.
Схема с VCU (Viscous Coupling Unit) аналогична тойотовской V-Flex II - межосевой дифференциал в ней отсутствует, момент направляется по карданному валу назад, где перед редуктором установлена, срабатывающая и соединяющая хвостовик кардана и входной вал редуктора при значительной пробуксовке передних колес. В остальное время машина остается переднеприводной. Опционально устанавливался задний фрикционный LSD-дифференциал.
- Плюсы - простота и дешевизна.
- Минусы - неадекватность поведения при активной езде, недостаточный коэффициент блокировки, низкая скорость срабатывания.
| Модель | Модификации |
| Lancer-Cedia | (CSxA, CSxW) 2000.05-… |
| Mirage Dingo | (CQxA) 1999.01-2002.12 |
| Dion | (CRxW) 2000.01-… |
| eK Sport-Wagon-Classy | (H81W) 2001.09-… |
| eK Active | (xBA-H81W) 2004.05 -… |
| Minica | (H12V/H15A) 1984-1988 |
| Minica | (H26A/H27A/H27V) 1990.02-1993.08 |
| Minica | (H36A/H37A) 1993.08-1998 |
| Minica | (H46A/H47A) 1998.08-… |
| Minica Toppo | (H27A/H27V) 1990.02-1993.08 |
| Minica Toppo | (H36A/H37V) 1993.08-1997.10 |
| ToppoBJ | (H46A/H47A) 1998.08-2003.08 |
| ToppoBJ Wide | (H48A) 1998.08-2001.06 |
| Colt New | (Z2xA) 2002.11-… |
| Colt Plus New | (Z2xW) 2004.10-… |
[свернуть]
Multi Select
Раскрыть...
Разумеется, не осталась в стороне и модная ныне схема с подключаемым электромеханической муфтой задним мостом, которая соответствует.
 В режиме «2WD» привод осуществляется только на передние колеса. В режиме «4WD» при нормальных условиях задействованы передние колеса, но, в зависимости от условий движения, блок управления может автоматически перераспределять момент и на задний мост . В режиме «LOCK» (на небольшой скорости) муфта блокируется полностью, при этом момент практически поровну делится между осями.
В режиме «2WD» привод осуществляется только на передние колеса. В режиме «4WD» при нормальных условиях задействованы передние колеса, но, в зависимости от условий движения, блок управления может автоматически перераспределять момент и на задний мост . В режиме «LOCK» (на небольшой скорости) муфта блокируется полностью, при этом момент практически поровну делится между осями.
- Плюсы - подключение задних колес осуществляется «разумнее», нежели в схеме VCU; есть возможность жестко включить полный привод.
- Минусы - не очень высокая живучесть; неадекватность работы в режиме «4WD».
[свернуть]
ACD+AYC
Раскрыть...
Надо признать, что самая продвинутая система легкового полного привода в мире была разработана именно MMC - для разных поколений Lancer Evolution.
Здесь имеется межосевой дифференциал, автоматически блокируемый гидромеханической муфтой с электронным управлением (ACD), причем «жесткость» его блокировки водитель может выбирать самостоятельно.
Вторая важнейшая составляющая - активный задний дифференциал (AYC). Он позволяет регулировать крутящий момент, передаваемый от двигателя на левое и правое задние колеса , в зависимости от покрытия, положения руля и педали акселератора, частоты вращения колес и скорости автомобиля. В повороте наибольший момент поступает на наружное колесо, что создает дополнительный поворачивающий момент. На скользком или неоднородном покрытии AYC заменяет самоблокирующийся дифференциал (наибольший момент поступает на колесо с лучшим сцеплением). Начиная с Evolution VIII применяется усовершенствованный дифференциал Super-AYC, отличающийся вместо конической и схемой управления с обратной связью.
- Плюсы - проходимость, управляемость, максимальная «интеллектуальность».
- Минусы - усложнение и удорожание конструкции.
[свернуть]
PartTime (EasySelect)
Раскрыть...
 Один из самых простых видов 4WD (на некоторых моделях имеет название EasySelect) - с подключаемым передним мостом, без межосевого дифференциала - применяется на исходно-заднеприводных моделях.
Один из самых простых видов 4WD (на некоторых моделях имеет название EasySelect) - с подключаемым передним мостом, без межосевого дифференциала - применяется на исходно-заднеприводных моделях.
Схема предусматривает непосредственное управление раздаточной коробкой при помощи рычага. Первоначально соединение передних приводных валов с колесами осуществлялось механическими муфтами свободного хода («хабами») с ручным или автоматическим приводом . На более свежих моделях для облегчения процесса подключения переднего моста применяется система ADD, которая с помощью пневмопривода разъединяет одну из передних полуосей.
- Плюсы - относительная простота конструкции, наличие понижающей передачи.
- Минусы - режим «4WD» можно использовать только на скользком покрытии (лед, снег, мокрая дорога) и в течение ограниченного времени - иначе повышается шум, расход топлива, ухудшается управляемость, сильно изнашивается резина и сами элементы трансмиссии. «Ручные» хабы надежны, но не слишком удобны в эксплуатации, а автоматические по живучести далеки от идеала.
| Модель | Модификации |
| Pajero III | (V64W/V74W) 1999.06-… (опц. - задний hybrid LSD / DiffLock) |
| Challenger/ PajeroSport / Montero Sport | (K9xW) 1996.05-… (опц. - задний hybrid LSD) |
| L200 / Strada | (K7xT) 1996.12-… (опц. - задний friction LSD / DiffLock) |
| Delica Space Gear | (PDxW/PExW/PFxW) 1994.03-… (опц. - задний friction LSD / hybrid LSD) |
| Pajero II | (V2xW/V4xW) 1990.10-1999.11 (опц. - задний friction LSD / hybrid LSD / DiffLock) |
| L200/Strada | (K3xT) 1991.03-1997.05 (опц. - задний friction LSD) |
| Delica Star Wagon/L300 | 1987.09-1999.06 (P2xW/P3xW/P4xW) (опц. - задний friction LSD) |
| Pajero Mini | (H56A/H58A) 1996.06-… |
| Pajero Junior | (H57A) 1995.10-1998.04 |
| Town Box | (U62W/U62V/U62T/U64W) 1998.11-… (опц. - задний friction LSD) |
| Town Box Wide | (U66W) 1999.04-2001.06 (опц. - задний friction LSD) |
Часть Pajero III получили в качестве опции MATC (Mitsubishi Active Traction Control), динамическую систему контроля тяги, которая на дорогах с твердым покрытием работает как противобуксовочная система, а на бездорожье имитирует блокировки переднего и заднего межколесных дифференциалов, подтормаживая буксующее колесо. Тем самым в режиме 4H внедорожные качества заметно повышаются без необходимости блокировки центрального дифференциала . Эта система анализирует условия движения посредством датчиков, измеряющих скорость, момент вращения кузова автомобиля и поперечное ускорение, а также угол поворота рулевого колеса и продольное ускорение. Минусы - меньшая эффективность по сравнению с DiffLock, возможен неравномерный износ колодок, при переходе ABS в аварийный режим блокировка исчезает.
Также с трансмиссией Super Select была впервые применена т.н. многорежимная ABS. Передние и задние тормоза управляются тремя независимыми каналами, что позволяет прикладывать точно необходимое тормозное усилие к каждому колесу. Однако, когда включается блокировка центрального дифференциала, различные коэффициенты сцепления колес с дорогой и соответственно разные тормозные усилия могут вызвать «скручивание» трансмиссии и вибрацию автомобиля. Mitsubishi впервые в мире решила эту проблему, создав многорежимную ABS, которая работает также и в режиме заблокированного центрального дифференциала.
Система AWC имеет три режима, управляемых электронным блоком по командам ручки на центральной консоли :
- 2WD (на некоторых рынках обозначается как 4WD ECO): формально переднеприводный, этот режим включает передачу небольшого момента на задние колеса для снижения шума от заднего моста. По некоторым данным, в этом режиме также может происходить переброска момента на заднюю ось при заметных пробуксовках.
- 4WD Auto : дозирует до 40% момента на задние колеса, в зависимости от положения педали акселератора (чем сильнее нажата, тем больше замыкание муфты), разности скоростей движения передних и задних колес (замыкается при проскальзывании и размыкается при его отсутствии) и скорости автомобиля. При полном нажатии педали газа назад направляется до 40% тяги, при скорости более 64 км/ч передача момента уменьшается до 25%. При равномерном движении на крейсерской скорости на задние колеса поступает до 15% момента, а на малых скоростях в крутых поворотах замыкание мутфы снижается, обеспечивая плавное прохождение поворота.
- 4WD Lock : муфта замыкается, не дожидаясь проскальзывания, и на малой скорости направляет на задние колеса до 60% момента (при полном нажатии педали акселератора на сухой дороге), а на высокой скорости момент распределяется между осями поровну. В крутых поворотах крутящий момент на задней оси в этом режиме также уменьшается не столь сильно, как в 4WD Auto.
Во всех режимах электроника продолжает изменять степень замыкания муфты, однако конструктивно не может замкнуть ее полностью, т.е. в муфте всегда присутствует проскальзывание и тепловыделение. Роль межколесных блокировок возложена на систему стабилизации, которая подтормаживает буксующие колеса.
| Режим движения | Сухая дорога | Заснеженная дорога | ||
| Колеса | передние | задние | передние | задние |
| Ускорение | 69% | 31% | 50% | 50% |
| при 30км/ч | при 15км/ч | |||
| 85% | 15% | 64% | 36% | |
| при 80км/ч | при 40км/ч | |||
| Установившаяся скорость | 84% | 16% | 74% | 26% |
| при 80 км/ч | при 40 км/ч | |||
В силу постоянных перегревов муфты и ее неспособности долго нести заметную нагрузку этот вид привода может считаться полным лишь с очень большой натяжкой и пригоден только для повышения управляемости на твердых покрытиях. Применяется, помимо Outlander XL, ASX, также на последнем Lancer.
Раскрыть...

Компоненты и функции:
| Компонент | Функция |
| Engine ECU | |
| ABS/ASC-ECU | Передает через CAN сигналы , необходимые 4WD-ECU:
|
| Переключатель режима привода 2WD/4WD/LOCK | Транслирует положение переключателя режима привода (2WD/4WD/LOCK) для 4WD-ECU. |
| ETACS-ECU |
|
| 4WD-ECU | Система оценивает дорожные условия и на основе сигналов от всех ЭБУ и переключателя режима привода направляет необходимую долю крутящего момента на задние колеса. Расчет оптимальной силы сжатия муфты, исходя из условий движения и текущего режима привода на основе сигналов от всех ЭБУ и переключателя режима привода. |
| Управление индикатором работы 4WD и индикатором блокировки в комбинации приборов. | |
| Управление функциями самодиагностики и отказоустойчивости. | |
| Управление функцией диагностики (совместим с MUT-III). | |
| Электронное управление муфтой | 4WD-ECU посредством муфты передает крутящий момент, соответствующий текущим условиям, на задние колеса. |
Индикатор режима привода
| Встроенный индикатор в комбинации приборов указывает на выбранный режим переключателя режима привода (не отображается в режиме 2WD).
|
| Диагностический разъем | Вывод диагностических кодов и связь с MUT-III. |
Конфигурация системы:

Схема управления:

Электрическая схема электронного управления AWC:

Механическая конструкция:


Электронное управление сцеплением состоит из переднего корпуса (front housing), главного фрикциона (main clutch), основного кулачкового механизма (main cam), шарика (ball), управляемого кулачкового механизма (pilot cam), арматуры (armature), управляемого фрикциона (pilot clutch), заднего корпуса (rear housing), магнитной катушки (magnetic coil) и вала (shaft).
- Передняя часть корпуса (front housing) соединена с карданным валом и вращается вместе с валом.
- В передней части корпуса смонтированы главный (main clutch) и управляемый фрикционы (pilot clutch) на валу (shaft), при этом управляемый фрикцион (pilot clutch) установлен через кулачковый упор (pilot cam).
[свернуть]
Работа системы
Раскрыть...
Муфта выключена (2WD). Момент от раздаточной коробки через карданный вал (propeller shaft) передается на переднюю часть корпуса (front housing). Т.к. электромагнитная катушка (magnetic coil) обесточена, управляемый (pilot clutch) и главный фрикционы (main clutch) не находятся в зацеплении и приводное усилие не передается на вал (shaft) и привод шестерни (drive pinion) заднего дифференциала.

Муфта включена (4WD). Момент от раздаточной коробки через карданный вал (propeller shaft) передается на переднюю часть корпуса (front housing). Т.к. электромагнитная катушка (magnetic coil) находится под напряжением, создается магнитное поле между задней части корпуса (rear housing), управляемым фрикционом (pilot clutch) и арматурой (armature). Магнитное поле воздействует на управляемый фрикцион и арматуру и включает фрикцион. Когда управляемый фрикцион включен, момент передается к управляемому кулачковому механизму (pilot cam). В ответ на эту силу шарик (ball) в кулачковом механизме (main cam) (pilot cam) втягивается и генерирует поступательный импульс. Этот импульс воздействует на главное сцепление (main clutch), и крутящий момент передается на задние колеса через вал и привод шестерни заднего дифференциала.
![]()
Момент, передаваемый на задние колеса, регулируется путем изменения тока, подаваемого на обмотку муфты.
[свернуть]
[свернуть]
S-AWC и Twin Motor 4WD
Раскрыть...
Вместе с обновлением Outlander XL (теперь это Outlander Sport) и утратой им агрессивного дизайна от Акинори Наканиши ущербный привод AWC в топовой версии модели был сменен на так называемый Super-AWC, или S-AWC. По сути, это модифицированный привод ACD+AYC, рассмотренный выше, где межосевой дифференциал ACD заменен на электромагнитный активный LSD-дифференциал AFD и дополнен электронными помощниками (система рулевого управления EPS для сглаживания рывков от работы AFD, активные системы ABS и ESP). S-AWC построен на принципе управления вектором тяги, когда за счет автоматического управления передним дифференциалом, муфтой задней оси, тормозами и усилителем рулевого управления происходит распределение моментов, передаваемых на все колеса. Ключевым фактором является учет системой показателей угловых скоростей.

Система S-AWC имеет три конфигурации (одна из которых - изначальный ACD+AYC - рассматривается как референсная):

Использованный в трансмиссии S-AWC межосевой LSD-дифференциал AFD в основе своей имеет электромагнитную муфту и также, как и AYC, способен управлять моментами, выдаваемыми на передние колеса. Механизм блокировки производит английская компания GKN - она же поставляет и межосевую муфту. Чтобы сжать фрикционы, блок управления полным приводом подает ток на обмотку электромагнита - и при наличии разницы в скоростях вращения передних колес два диска шарикового нажимного механизма проворачиваются друг относительно друга, создавая осевое усилие, сжимающее фрикционы (точно как и в трансмиссии AWC). Степень блокировки дифференциала постоянно изменяется электроникой, но жесткая связь между полуосями невозможна. Т.е. в сложных условиях AYC на задней оси не сделает погоды, ведь нужный момент на него не попадёт и вообще задняя ось в любой момент может отключиться по перегреву.

Трансмиссия S-AWC имеет четыре рабочих режима:
- AWC ECO подает момент только на переднюю ось («для экономии топлива») и подключает заднюю ось только при пробуксовках;
- NORMAL оптимально распределяет момент по всем колесам в соответствии с дорожными условиями;
- SNOW предназначен для снега, льда и других скользких покрытий;
- LOCK замыкает все дифференциалы, обеспечивая наибольший внедорожный потенциал.
Также отдельным случаем является вариант, при котором передняя и задняя оси вообще не связаны между собой и каждая приводится своим электромотором независимо:

Здесь также есть интрига, т.к. по разным данным одной и той же Mitsubishi, на осях могут использоваться как дифференциалы AYC, так и обычные открытые дифференциалы . Или, например, на передней оси - открытый, а на задней - AYC.
Twin Motors 4WD имеет только два режима - «NORMAL» для обычных условий и «4WD LOCK» для сложных. При этом, скажем, тесты «Авторевю» показывают, что трансмиссия Twin Motor 4WD неспособна преодолевать сколько-нибудь затрудненные условия. От слова «совсем»:
Сперва мы отправились туда, где и принято пользоваться полным приводом зимой, - в снег. Начали с гибрида и… тут же закончили: PHEV мгновенно застрял! … Алгоритм работы силовой установки - загадка. Нажмешь на газ - и вращается только передняя ось. А в следующий раз начинают крутиться задние колеса, но передние стоят на месте. Отпускаешь правую педаль - а вращение еще какое-то время продолжается!

Mitsubishi на практике изучала использование систем полного привода, с тем, чтобы определиться, какое технологическое решение будет наиболее приемлемым для данного типа автомобиля, и наиболее удобно для будущих владельцев этого компактного кроссовера.
Инженеры оказались от ставшего традиционным решения - использования автоматической трансмиссии с подключением полного привода "по требованию". Такие системы основаны на том, что при проскальзывании передних колес, часть крутящего момента перераспределяется на задние колеса. Специалисты Mitsubishi понимали, что потребителю более интересны системы, активно снижающие вероятность проскальзывания колес.
Предыдущий Outlander имел постоянный полный привод с межосевым дифференциалом, блокируемым вискомуфтой, распределение привода по осям 50:50 обеспечивает прекрасные показатели в тяжелых погодных условиях , но для повседневной эксплуатации расход топлива был высоким. Mitsubishi стремилась придать новому Outlander-у те же, или лучшие качества при использовании в тяжелых условиях , при минимальных изменениях показателей расхода топлива.
Так появилась система полноприводной трансмиссии MITSUBISHI AWC (All Wheel Control). С английского языка All Wheel Control дословно переводится как контроль всех колес. Эта система предоставляет водителю возможность выбора типа привода. Система по сущности представляет собой сочетание особой полноприводной трансмиссии Multi-Select 4WD и электронного распределения крутящего момента, а кроме этого противобуксовочную современную систему и систему курсовой устойчивости. Благодаря системе AWC, достигается прекрасное сцепление колес автомобиля с дорогой и отменная управляемость на скользких участках трассы. Чтобы обеспечить оптимальную работу трансмиссии достаточно выбрать один из представленных трех режимов на центральной консоли «2WD», «4WD» или «Lock».
| Режим движения | Описание | Преимущества |
| 2WD | Направляет крутящий момент на передние колеса | Лучшая экономия горючего, снижение шумности автомобиля, лучшая управляемость. При этом также сохраняется возможность, что блок управления направляет крутящий момент к заднему мосту для уменьшения его шумности. |
| 4WD Auto | Дозирует направление крутящего момента на задние колеса в зависимости от положения педали акселератора и разности скоростей движения передних и задних колес | Оптимальное распределение крутящего момента для данных условий вождения. Распределение крутящего момента между передним и задним мостами производится автоматически электронным блоком в зависимости от параметров вождения автомобиля (скорости передних и задних колес, положение педали акселератора и скорость автомобиля). Режим привода на 2 колеса является предпочтительным. |
| 4WD Lock | На задние колеса направляется в 1.5 раза больше крутящего момента, чем в режиме 4WD | Увеличивается сцепление с поверхностью, обеспечивается стабипьность на большой скорости и лучшая проходимость на неровной или скользкой поверхности . Режим LOCK аналогичен режиму 4WD, но с измененным законом распределения крутящего момента между мостами. На малой скорости на задний мост подается в 1,5 раза более высокий крутящий момент, а на высокой скорости момент распределяется поровну между мостами. |
Два режима полного привода
4WD Auto
При выборе "4WD Auto" система полного привода автомобиля Outlander 4WD постоянно распределяет часть крутящего момента на задние колеса, автоматически увеличивая это соотношение при нажатии педали газа. Муфта направляет до 40% тяги на задние колеса при полном нажатии педали газа и уменьшает этот показатель до 25% при скорости более 40миль в час. При равномерном движении на крейсерской скорости на задние колеса направляется до 15% доступного крутящего момента. На малых скоростях в крутых поворотах усилие снижается, обеспечивая плавное прохождение поворота.
4WD Lock
Для вождения в особо сложных условиях, например по снегу, водитель может выбрать режим "4WD Lock". При включенной блокировке, системы все еще автоматически перераспределяет крутящий момент между передними и задними колесами, но при этом большая часть крутящего момента передается на задние колеса. Например, при ускорении на подъеме, муфта немедленно станет передавать большую часть крутящего момента на задние колеса, чтобы обеспечить сцепление с дорогой всех четырех колес. Напротив, автоматический полный привод "по запросу" сначала "дождется" проскальзывания передних колес, а уж затем передаст крутящий момент на задние колеса, что может помешать разгону.
На сухой дороге режим 4WD Lock обеспечивает эффективный разгон. Больше крутящего момента направляется на задние колеса, что обеспечивает большую мощность , лучшую управляемость при разгоне на заснеженной или рыхлой дороге и улучшает стабильность на высоких скоростях . Доля крутящего момента на задних колесах возрастает на 50% по сравнению с режимом 4WD, что означает, что до 60% доступного крутящего момента направляется на задние колесапри полном нажатии педали акселератора на сухой дороге. В режиме 4WD Lock в крутых поворотах крутящий момент на задних колесах уменьшается не в такой степени, как при движении в режиме 4WD Auto.
Отношение крутящих моментов на передние/задние колеса в режиме 4WD имеет следующие значения:
| Режим движения | Сухая дорога | Заснеженная дорога | ||
| Колеса | передние | задние | передние | задние |
| Ускорение | 69% | 31% | 50% | 50% |
| при 30 км/ч | при 30 км/ч | при 15 км/ч | при15 км/ч | |
| 85% | 15% | 64% | 36% | |
| при 80 км/ч | при 80 км/ч | при 40 км/ч | при 40 км/ч | |
| Установившаяся скорость | 84% | 16% | 74% | 26% |
| при 80 км/ч | при 80 км/ч | при 40 км/ч | при 40 км/ч | |
Конструктивная схема

Компоненты системы и функции
|
Название компонента |
Функционирование |
|
|
|
Передает следующие сигналы необходимые 4WD-ECU через CAN.
|
|
|
Переключатель режима привода 2WD/4WD/LOCK |
Передает сигнал положения переключателя режима привода для 4WD-ECU. |
|
|
|
Система оценивает дорожные условия и на основе сигналов от каждого ЭБУ, переключателя режима привода, направляет необходимую долю крутящего момента на задние колеса. Расчет оптимальной силе ограничения дифференциальной судя по условию автомобиля и настоящего режима привода на основе сигналов от каждого ЭБУ, переключателя режима привода, контролирует текущее значение доставлен в электронной связью управления. |
|
|
Управление показателями (4WD индикатор работы и индикатор блокировки) в комбинации приборов. |
|
|
Управляет функцию самодиагностики и отказоустойчивости функции. |
|
|
Управление функцией диагностики (совместим с MUT-III). |
|
|
Электронное управление сцеплением |
4WD-ECU передает крутящий момент, соответствующий текущему значению на задние колеса. |
|
Индикатор режима привода
|
Встроенный в комбинации приборов указывает на выбранный режим переключателя режима привода (не отображается в режиме 2WD).
|
|
Диагностический разъем |
Вывод диагностических кодов и устанавливает связь с MUT-III. |
Конфигурация системы

Схема управления

Электрическая схема электронного управления 4 WD

Конструкция


Электронное управление сцеплением состоит из переднего корпуса (front housing), главного фрикциона (main clutch), основного кулачкового механизма (main cam), шарика (ball), управляемогой кулачковвого механизма (pilot cam), арматуры (armature), управляемого фрикциона (pilot clutch), заднего корпуса (rear housing), магнитной катушки (magnetic coil), и вала (shaft).
- Передняя часть корпуса (front housing) соединена с карданным валом и вращается вместе с валом.
- В передней части корпуса смонтированы главный фрикцион (main clutch) и управляемый фрикцион (pilot clutch) на валу (shaft) (управляемый фрикцион (pilot clutch) установлен через кулачковый упор (pilot cam)).
- Вал находится в зацеплении через зубцы с ведущей шестерней (drive pinion) заднего дифференциала.
Функционирование
Сцепление выключено (2WD: магнитная катушка обесточена.)

Движущая сила от раздаточной коробки через карданный вал (propeller shaft) передается на переднюю часть корпуса (front housing). Потому что магнитная катушка (magnetic coil) обесточена управляемый фрикцион (pilot clutch) и главный фрикцион (main clutch) не находятся в зацеплении и приводное усилие не передается на вал (shaft) и привод шестерни (drive pinion) заднего дифференциала.
Сцепление работает (4WD: магнитные катушки напряжением.)

Движущая сила от раздаточной коробки через карданный вал (propeller shaft) передается на переднюю часть корпуса (front housing). Когда магнитная катушка (magnetic coil) находится под напряжением, создается магнитное поле между задней части корпуса (rear housing) , управляемым фрикционом (pilot clutch), и арматурой (armature). Магнитное поле воздействует на управляемый фрикцион (pilot clutch) и арматуру (armature) включает фрикцион (pilot clutch). Когда управляемый фрикцион (pilot clutch) включен, движущая сила передается к управляемому кулачковому механизму (pilot cam). В ответ на эту силу шарик (ball) в кулачковом механизме (main cam) (pilot cam) втягивается и генерирует поступательный импульс. Этот импульс воздействует на главное сцепление (main clutch) и крутящий момент передается на задние колеса через вал и привод шестерни заднего дифференциала.
Путем регулирования тока, подаваемого на магнитную катушку, количество движущей силы передаваемой на задние колеса может регулироваться в диапазоне от 0 до 100%.



