Χαρακτηριστικά γνωρίσματα:
- Γενικές πληροφορίες για το ΒΚΕΠΤ
- Χρησιμοποιεί ελεγκτή ισχύος σταδίου
- Παράδειγμα κώδικα προγράμματος
Εισαγωγή
Αυτή η σημείωση εφαρμογής περιγράφει τον τρόπο εφαρμογής ενός ελέγχου κινητήρα συνεχούς ρεύματος χωρίς ψήκτρες (BCEM) χρησιμοποιώντας κωδικοποιητές που βασίζονται στον μικροελεγκτή AVR AT90PWM3.
Ο πυρήνας AVR υψηλής απόδοσης του μικροελεγκτή, ο οποίος περιέχει τον ελεγκτή power stage, σας επιτρέπει να εφαρμόσετε μια συσκευή ελέγχου κινητήρα DC χωρίς ψήκτρες υψηλής ταχύτητας.
Αυτό το έγγραφο περιγράφει εν συντομία την αρχή λειτουργίας ενός κινητήρα συνεχούς ρεύματος χωρίς ψήκτρες, περιγράφει λεπτομερώς τον έλεγχο του UCSF σε λειτουργία αφής και περιγράφει το διάγραμμα κυκλώματος του σχεδίου αναφοράς ATAVRMC100 στο οποίο βασίζεται αυτή η σύσταση εφαρμογής.
Συζητείται επίσης μια υλοποίηση λογισμικού με βρόχο ελέγχου που εφαρμόζεται από λογισμικό που βασίζεται σε ελεγκτή PID. Για τον έλεγχο της διαδικασίας μεταγωγής, υπονοείται η χρήση μόνο αισθητήρων θέσης με βάση το φαινόμενο Hall.
Λειτουργική αρχή
Οι τομείς εφαρμογής του ΒΚΕΠΤ αυξάνονται συνεχώς, γεγονός που οφείλεται σε μια σειρά από πλεονεκτήματα τους:
- Η απουσία διάταξης πολλαπλής, η οποία απλοποιεί ή και εξαλείφει τη συντήρηση.
- Δημιουργία χαμηλότερων ακουστικών και ηλεκτρικών επιπέδων θορύβου σε σύγκριση με τους γενικούς κινητήρες μεταγωγέα DC.
- Ικανότητα εργασίας σε επικίνδυνα περιβάλλοντα (με εύφλεκτα προϊόντα).
- Καλή ισορροπία μεταξύ βάρους και ισχύος...
Οι κινητήρες αυτού του τύπου χαρακτηρίζονται από μια μικρή αδράνεια του ρότορα, tk. Οι περιελίξεις βρίσκονται στον στάτορα. Η μεταγωγή ελέγχεται ηλεκτρονικά. Οι ροπές μεταγωγής καθορίζονται είτε από πληροφορίες από τους αισθητήρες θέσης είτε με μέτρηση του οπίσθιου emf που δημιουργείται από τις περιελίξεις.
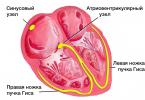
Όταν ελέγχεται με χρήση αισθητήρων, το BKEPT αποτελείται, κατά κανόνα, από τρία κύρια μέρη: τον στάτορα, τον ρότορα και τους αισθητήρες Hall.
Ο στάτορας ενός κλασικού τριφασικού BKEPT περιέχει τρεις περιελίξεις. Σε πολλούς κινητήρες, οι περιελίξεις χωρίζονται σε διάφορα τμήματα για να μειωθεί ο κυματισμός της ροπής.
Το σχήμα 1 δείχνει το ηλεκτρικό κύκλωμα ισοδύναμου στάτη. Αποτελείται από τρεις περιελίξεις, καθεμία από τις οποίες περιέχει τρία στοιχεία συνδεδεμένα σε σειρά: αυτεπαγωγή, αντίσταση και πίσω emf.
Εικόνα 1. Κύκλωμα ισοδύναμου ηλεκτρικού στάτη (τρεις φάσεις, τρεις περιελίξεις)
Ο ρότορας BKEPT αποτελείται από ζυγό αριθμό μόνιμων μαγνητών. Ο αριθμός των μαγνητικών πόλων στον ρότορα επηρεάζει επίσης το μέγεθος του βήματος και τον κυματισμό της ροπής. Όσο μεγαλύτερος είναι ο αριθμός των πόλων, τόσο μικρότερο είναι το μέγεθος του βήματος περιστροφής και τόσο μικρότερος είναι ο κυματισμός της ροπής. Μπορούν να χρησιμοποιηθούν μόνιμοι μαγνήτες με 1,5 ζεύγη πόλων. Σε ορισμένες περιπτώσεις, ο αριθμός των ζευγών πόλων αυξάνεται σε 8 (Εικόνα 2).

Σχήμα 2. Στάτης και ρότορας τριφασικού, τριών περιελίξεων ΒΚΕΠΤ
Οι περιελίξεις τοποθετούνται μόνιμα και ο μαγνήτης περιστρέφεται. Ο ρότορας BKEPT χαρακτηρίζεται από μικρότερο βάρος σε σχέση με τον ρότορα ενός συμβατικού κινητήρα γενικής χρήσης DC, στον οποίο οι περιελίξεις βρίσκονται στον ρότορα.
Αισθητήρας Hall
Για να εκτιμηθεί η θέση του ρότορα, τρεις αισθητήρες Hall είναι ενσωματωμένοι στο περίβλημα του κινητήρα. Οι αισθητήρες τοποθετούνται υπό γωνία 120° μεταξύ τους. Με τη βοήθεια αυτών των αισθητήρων, είναι δυνατή η πραγματοποίηση 6 διαφορετικών εναλλαγών.
Η εναλλαγή φάσης εξαρτάται από την κατάσταση των αισθητήρων Hall.
Η τάση τροφοδοσίας στις περιελίξεις αλλάζει μετά την αλλαγή των καταστάσεων εξόδου των αισθητήρων Hall. Όταν η συγχρονισμένη μεταγωγή γίνεται σωστά, η ροπή παραμένει περίπου σταθερή και υψηλή.
Εικόνα 3. Σήματα αισθητήρα Hall κατά την περιστροφή
Εναλλαγή φάσης
Για λόγους απλοποιημένης περιγραφής της λειτουργίας ενός τριφασικού BKEPT, θα εξετάσουμε μόνο την εκδοχή του με τρεις περιελίξεις. Όπως φαίνεται νωρίτερα, η εναλλαγή φάσης εξαρτάται από τις τιμές εξόδου των αισθητήρων Hall. Με τη σωστή τάση που εφαρμόζεται στις περιελίξεις του κινητήρα, δημιουργείται ένα μαγνητικό πεδίο και ξεκινά η περιστροφή. Η πιο κοινή και απλή μέθοδος ελέγχου μεταγωγής που χρησιμοποιείται για τον έλεγχο του BKEPT είναι ένα κύκλωμα on-off, όταν η περιέλιξη είτε μεταφέρει ρεύμα είτε όχι. Κάθε φορά, μόνο δύο περιελίξεις μπορούν να τροφοδοτηθούν και το τρίτο παραμένει απενεργοποιημένο. Η σύνδεση των περιελίξεων με τις ράγες ισχύος προκαλεί τη ροή ηλεκτρικού ρεύματος. Αυτή η μέθοδος ονομάζεται εναλλαγή κλειδιού ή μεταγωγή μπλοκ.
Για τον έλεγχο του BKEPT χρησιμοποιείται ένα power stage που αποτελείται από 3 ημιγέφυρες. Το διάγραμμα σταδίου ισχύος φαίνεται στο Σχήμα 4.

Εικόνα 4. Στάδιο ισχύος
Σύμφωνα με τις τιμές ανάγνωσης των αισθητήρων Hall, καθορίζεται ποια κλειδιά πρέπει να κλείσουν.
Πίνακας 1. Εναλλαγή πλήκτρων δεξιόστροφα
Για κινητήρες πολλαπλών πεδίων, η ηλεκτρική περιστροφή δεν ταιριάζει με τη μηχανική περιστροφή. Για παράδειγμα, το τετραπολικό BKEPT τέσσερις κύκλοι ηλεκτρικής περιστροφής αντιστοιχούν σε μία μηχανική περιστροφή.
Η ισχύς και η ταχύτητα του κινητήρα εξαρτάται από την ισχύ του μαγνητικού πεδίου. Η ταχύτητα και η ροπή του κινητήρα μπορούν να ελεγχθούν αλλάζοντας το ρεύμα μέσω των περιελίξεων. Ο πιο συνηθισμένος τρόπος ελέγχου του ρεύματος μέσω των περιελίξεων είναι ο έλεγχος του μέσου ρεύματος. Για αυτό, χρησιμοποιείται διαμόρφωση πλάτους παλμού (PWM), ο κύκλος λειτουργίας του οποίου καθορίζει τη μέση τιμή της τάσης στις περιελίξεις και, κατά συνέπεια, τη μέση τιμή ρεύματος και, κατά συνέπεια, την ταχύτητα περιστροφής. Η ταχύτητα μπορεί να ρυθμιστεί σε συχνότητες από 20 έως 60 kHz.
Το περιστρεφόμενο πεδίο ενός τριφασικού, τριών περιελίξεων BKEPT φαίνεται στο Σχήμα 5.
Εικόνα 5. Βήματα μεταγωγής και περιστρεφόμενο πεδίο
Η διαδικασία μεταγωγής δημιουργεί ένα περιστρεφόμενο πεδίο. Στο στάδιο 1, η φάση Α συνδέεται με τη ράγα θετικής ισχύος με τον διακόπτη SW1, η φάση Β συνδέεται στο κοινό με τον διακόπτη SW4 και η φάση Γ παραμένει ασύνδετη. Οι φάσεις Α και Β δημιουργούν δύο διανύσματα μαγνητικής ροής (που φαίνονται με το κόκκινο και το μπλε βέλος, αντίστοιχα), και το άθροισμα αυτών των δύο διανυσμάτων δίνει το διάνυσμα ροής του στάτη (πράσινο βέλος). Μετά από αυτό, ο ρότορας προσπαθεί να ακολουθήσει τη μαγνητική ροή. Μόλις ο ρότορας φτάσει σε μια ορισμένη θέση, στην οποία η κατάσταση των αισθητήρων Hall αλλάζει από την τιμή "010" σε "011", οι περιελίξεις του κινητήρα αλλάζουν ανάλογα: η φάση Β παραμένει χωρίς τροφοδοσία και η φάση C συνδέεται σε κοινή. Αυτό οδηγεί στη δημιουργία ενός νέου διανύσματος μαγνητικής ροής στάτη (στάδιο 2).
Εάν ακολουθήσουμε το σχήμα μεταγωγής που φαίνεται στο Σχήμα 3 και στον Πίνακα 1, θα λάβουμε έξι διαφορετικά διανύσματα μαγνητικής ροής που αντιστοιχούν σε έξι στάδια μεταγωγής. Έξι βήματα αντιστοιχούν σε μία περιστροφή του ρότορα.
Κιτ εκκίνησης ATAVRMC100
Το διάγραμμα κυκλώματος φαίνεται στα σχήματα 21, 22, 23 και 24 στο τέλος του εγγράφου.
Το πρόγραμμα περιέχει έναν βρόχο ελέγχου ταχύτητας χρησιμοποιώντας έναν ελεγκτή PID. Ένας τέτοιος ρυθμιστής αποτελείται από τρεις συνδέσμους, καθένας από τους οποίους χαρακτηρίζεται από τον δικό του συντελεστή μετάδοσης: Kp, Ki και Kd.
Το Kp είναι ο συντελεστής μεταφοράς του αναλογικού συνδέσμου, το Ki είναι ο συντελεστής μεταφοράς του συνδέσμου ολοκλήρωσης και το Kd είναι ο συντελεστής μεταφοράς του διαφοροποιητικού συνδέσμου. Η απόκλιση της δεδομένης ταχύτητας από την πραγματική (στο Σχήμα 6 ονομάζεται "σήμα ασυμφωνίας") επεξεργάζεται από κάθε έναν από τους συνδέσμους. Το αποτέλεσμα αυτών των εργασιών προστίθεται και τροφοδοτείται στον κινητήρα για να ληφθεί η απαιτούμενη ταχύτητα (βλ. εικόνα 6).

Εικόνα 6. Δομικό διάγραμμα του ελεγκτή PID
Ο συντελεστής Kp επηρεάζει τη διάρκεια της μεταβατικής διαδικασίας, ο συντελεστής Ki σάς επιτρέπει να καταστείλετε στατικά σφάλματα και το Kd χρησιμοποιείται, ειδικότερα, για τη σταθεροποίηση της θέσης (δείτε την περιγραφή του βρόχου ελέγχου στο αρχείο με το λογισμικό για την αλλαγή του συντελεστές).
Περιγραφή υλικού
Όπως φαίνεται στην Εικόνα 7, ο μικροελεγκτής περιέχει 3 Power Stage Controllers (PSC). Κάθε PSC μπορεί να θεωρηθεί ως ένας διαμορφωτής πλάτους παλμού (PWM) με δύο σήματα εξόδου. Το PSC υποστηρίζει τη δυνατότητα ελέγχου της μη επικαλυπτόμενης καθυστέρησης των διακοπτών τροφοδοσίας (δείτε την τεκμηρίωση AT90PWM3 για μια πιο λεπτομερή εξήγηση της λειτουργίας του PSC, καθώς και το Σχήμα 9) για να αποφευχθεί η εμφάνιση διαπερατού ρεύματος.
Η είσοδος συναγερμού (Over_Current, overcurrent) σχετίζεται με το PSCIN. Η είσοδος συναγερμού επιτρέπει στον μικροελεγκτή να απενεργοποιεί όλες τις εξόδους PSC.

Εικόνα 7. Υλοποίηση υλικού
Για τη μέτρηση του ρεύματος μπορούν να χρησιμοποιηθούν δύο διαφορικά κανάλια με προγραμματιζόμενη βαθμίδα ενίσχυσης (Ku=5, 10, 20 ή 40). Αφού επιλέξετε το κέρδος, είναι απαραίτητο να επιλέξετε την τιμή της αντίστασης shunt για την πληρέστερη κάλυψη του εύρους μετατροπής.
Το σήμα Over_Current δημιουργείται από έναν εξωτερικό συγκριτή. Η οριακή τάση του συγκριτή μπορεί να ρυθμιστεί χρησιμοποιώντας το εσωτερικό DAC.
Η εναλλαγή φάσης πρέπει να πραγματοποιείται σύμφωνα με την τιμή στις εξόδους των αισθητήρων Hall. Τα DC_A, DC_B και DC_C συνδέονται στις εισόδους εξωτερικών πηγών διακοπής ή σε τρεις εσωτερικούς συγκριτές. Οι συγκριτές δημιουργούν τον ίδιο τύπο διακοπών με τις εξωτερικές διακοπές. Το σχήμα 8 δείχνει πώς χρησιμοποιούνται οι θύρες I/O στο κιτ εκκίνησης.
Εικόνα 8. Χρήση θυρών I/O μικροελεγκτή (πακέτο SO32)
Το VMOT (Vmot) και το VMOT_Half (1/2 Vmot) υλοποιούνται αλλά δεν χρησιμοποιούνται. Μπορούν να χρησιμοποιηθούν για τη λήψη πληροφοριών σχετικά με την τάση τροφοδοσίας του κινητήρα.
Οι έξοδοι H_x και L_x χρησιμοποιούνται για τον έλεγχο της γέφυρας ισχύος. Όπως αναφέρθηκε παραπάνω, εξαρτώνται από τον ελεγκτή σταδίου ισχύος (PSC) που παράγει τα σήματα PWM. Σε μια τέτοια εφαρμογή, συνιστάται η χρήση της λειτουργίας κεντροστοιχισμένης λειτουργίας (βλ. Εικόνα 9) όπου ο καταχωρητής OCR0RA χρησιμοποιείται για να χρονιστεί η έναρξη της μετατροπής ADC για τη μέτρηση ρεύματος.

Εικόνα 9. Ταλαντογράμματα σημάτων PSCn0 και PSCn1 σε λειτουργία κεντροστοιχισμένης
- Στην ώρα 0 = 2 * OCRnSA * 1/Fclkpsc
- Στην ώρα 1 = 2* (OCRnRB - OCRnSB + 1) * 1/Fclkpsc
- Περίοδος PSC = 2 * (OCRnRB + 1) * 1/Fclkpsc
Παύση χωρίς επικάλυψη μεταξύ PSCn0 και PSCn1:
- |OCRnSB - OCRnSA| *1/Fclkpsc
Το μπλοκ PSC χρονίζεται από τα σήματα CLKPSC.
Μία από τις δύο μεθόδους μπορεί να χρησιμοποιηθεί για την παροχή σημάτων PWM στο στάδιο ισχύος. Η πρώτη είναι η εφαρμογή σημάτων PWM στο επάνω και κάτω μέρος της βαθμίδας ισχύος και η δεύτερη είναι η εφαρμογή σημάτων PWM μόνο στα επάνω μέρη.
Περιγραφή του λογισμικού
Η Atmel έχει αναπτύξει βιβλιοθήκες για τη διαχείριση του CKET. Το πρώτο βήμα στη χρήση τους είναι η διαμόρφωση και η προετοιμασία του μικροελεγκτή.
Διαμόρφωση και αρχικοποίηση του μικροελεγκτή
Για να το κάνετε αυτό, χρησιμοποιήστε τη συνάρτηση mc_init_motor(). Καλεί τις λειτουργίες προετοιμασίας υλικού και λογισμικού και επίσης αρχικοποιεί όλες τις παραμέτρους του κινητήρα (κατεύθυνση περιστροφής, ταχύτητα και διακοπή κινητήρα).
Δομή υλοποίησης λογισμικού
Μετά τη διαμόρφωση και την προετοιμασία του μικροελεγκτή, ο κινητήρας μπορεί να ξεκινήσει. Απαιτούνται μόνο μερικές λειτουργίες για τον έλεγχο του κινητήρα. Όλες οι συναρτήσεις ορίζονται στο mc_lib.h:
Void mc_motor_run(void) - Χρησιμοποιείται για την εκκίνηση του κινητήρα. Η συνάρτηση βρόχου σταθεροποίησης καλείται να ρυθμίσει τον κύκλο λειτουργίας PWM. Μετά από αυτό, εκτελείται η πρώτη φάση μεταγωγής. Bool mc_motor_is_running(void) - Προσδιορίστε την κατάσταση του κινητήρα. Εάν "1", τότε ο κινητήρας λειτουργεί, εάν "0", τότε ο κινητήρας είναι σταματημένος. void mc_motor_stop(void) - Χρησιμοποιείται για τη διακοπή του κινητήρα. void mc_set_motor_speed(ταχύτητα U8) - Ορίστε την ταχύτητα που καθορίζεται από το χρήστη. U8 mc_get_motor_speed(void) - Επιστρέφει την ταχύτητα που έχει καθορίσει ο χρήστης. void mc_set_motor_direction(κατεύθυνση U8) - Ορίζει την κατεύθυνση περιστροφής σε "CW" (δεξιόστροφα) ή "CCW" (αριστερόστροφα). U8 mc_get_motor_direction(void) - Επιστρέφει την τρέχουσα φορά περιστροφής του κινητήρα. U8 mc_set_motor_measured_speed(U8 μετρημένη_ταχύτητα) - Αποθηκεύστε τη μετρημένη ταχύτητα στη μεταβλητή μετρημένη_ταχύτητα. U8 mc_get_motor_measured_speed(void) - Επιστρέφει τη μετρούμενη ταχύτητα. void mc_set_Close_Loop(void) void mc_set_Open_Loop(void) - Διαμόρφωση βρόχου σταθεροποίησης: κλειστός βρόχος ή ανοιχτός βρόχος (βλ. εικόνα 13).
Εικόνα 10. Διαμόρφωση AT90PWM3

Εικόνα 11. Δομή λογισμικού
Το σχήμα 11 δείχνει τέσσερις μεταβλητές mc_run_stop (start/stop), mc_direction (direction), mc_cmd_speed (ρυθμισμένη ταχύτητα) και mc_measured_speed (μετρούμενη ταχύτητα). Είναι βασικές μεταβλητές προγράμματος που μπορούν να προσπελαστούν μέσω των συναρτήσεων που έχουν οριστεί από τον χρήστη που περιγράφηκαν προηγουμένως.
Η υλοποίηση του λογισμικού μπορεί να προβληθεί ως μαύρο κουτί με το όνομα "Motor control" (Εικόνα 12) και πολλές εισόδους (mc_run_stop, mc_direction, mc_cmd_speed, mc_measured_speed) και εξόδους (όλα τα σήματα ελέγχου γέφυρας ισχύος).
Εικόνα 12. Βασικές μεταβλητές προγράμματος
Οι περισσότερες από τις λειτουργίες είναι διαθέσιμες στο mc_drv.h. Μόνο μερικά από αυτά εξαρτώνται από τον τύπο του κινητήρα. Οι συναρτήσεις μπορούν να χωριστούν σε τέσσερις κύριες κατηγορίες:
- Αρχικοποίηση υλικού void mc_init_HW(void); Η προετοιμασία υλικού ολοκληρώνεται πλήρως σε αυτήν τη λειτουργία. Εδώ αρχικοποιούνται οι θύρες, οι διακοπές, τα χρονόμετρα και ο ελεγκτής σταδίου ισχύος.
- Λειτουργίες εναλλαγής φάσης U8 mc_get_hall(void); Ανάγνωση της κατάστασης των αισθητήρων Hall που αντιστοιχούν σε έξι επίπεδα μεταγωγής (HS_001, HS_010, HS_011, HS_100, HS_101, HS_110).
Διακοπή void mc_hall_a(void); _interrupt void mc_hall_b(void); _interrupt void mc_hall_c(void); Αυτές οι λειτουργίες εκτελούνται εάν εντοπιστεί εξωτερική διακοπή (αλλαγή στην έξοδο των αισθητήρων Hall). Σας επιτρέπουν να κάνετε εναλλαγή φάσης και να υπολογίσετε την ταχύτητα.
Void mc_duty_cycle (επίπεδο U8); Αυτή η λειτουργία ρυθμίζει τον κύκλο λειτουργίας PWM σύμφωνα με τη διαμόρφωση PSC.
Void mc_switch_commutation(θέση U8); Η εναλλαγή φάσης πραγματοποιείται σύμφωνα με την τιμή στις εξόδους των αισθητήρων Hall και μόνο εάν ο χρήστης εκκινήσει τον κινητήρα.
- Διαμόρφωση χρόνου μετατροπής void mc_config_sampling_period(void); Εκκινήστε το χρονόμετρο 1 για να δημιουργήσετε μια διακοπή κάθε 250 µs. _interrupt void launch_sampling_period(void); Αφού ενεργοποιηθεί η διακοπή των 250 µs, η σηµαία ορίζεται. Μπορεί να χρησιμοποιηθεί για τον έλεγχο του χρόνου μετατροπής.
- Εκτίμηση ταχύτητας void mc_config_time_estimation_speed(void); Διαμόρφωση χρονοδιακόπτη 0 για την εκτέλεση της λειτουργίας υπολογισμού ταχύτητας.
void mc_estimation_speed(void); Αυτή η λειτουργία υπολογίζει τις στροφές του κινητήρα με βάση την αρχή της μέτρησης της περιόδου παλμού του αισθητήρα εφέ Hall.
Διακοπή void ovfl_timer(void); Όταν εμφανίζεται μια διακοπή, μια μεταβλητή 8 bit αυξάνεται για την υλοποίηση ενός χρονοδιακόπτη 16 bit χρησιμοποιώντας ένα χρονόμετρο 8 bit.
- Τρέχουσα μέτρηση _interrupt void ADC_EOC(void); Η συνάρτηση ADC_EOC εκτελείται αμέσως μετά την ολοκλήρωση της μετατροπής του ενισχυτή για να οριστεί μια σημαία που μπορεί να χρησιμοποιηθεί από τον χρήστη.
void mc_init_current_measure(void); Αυτή η λειτουργία αρχικοποιεί τον ενισχυτή 1 για τη μέτρηση ρεύματος.
U8 mc_get_current(void); Ανάγνωση της τρέχουσας τιμής εάν ολοκληρωθεί η μετατροπή.
bool mc_conversion_is_finished(void); Υποδεικνύει την ολοκλήρωση της μετατροπής.
void mc_ack_EOC(void); Επαναφέρετε τη σημαία ολοκλήρωσης μετατροπής.
- Ανίχνευση τρέχουσας υπερφόρτωσης void mc_set_Over_Current(U8 Level); Ορίζει το όριο για την ανίχνευση υπερέντασης. Το κατώφλι είναι η έξοδος DAC που συνδέεται με έναν εξωτερικό συγκριτή.
void mc_init_SW(void); Χρησιμοποιείται για την προετοιμασία του λογισμικού. Ενεργοποιεί όλες τις διακοπές.
void mc_init_port(void); Εκκινήστε μια θύρα I/O καθορίζοντας μέσω των καταχωρητών DDRx ποιες ακίδες λειτουργούν ως είσοδος και ποιες ως έξοδος, καθώς και προσδιορίζοντας ποιες εισόδους θα ενεργοποιούν τις αντιστάσεις έλξης (μέσω του καταχωρητή PORTx).
void mc_init_pwm(void); Αυτή η συνάρτηση ξεκινά το PLL και επαναφέρει όλους τους καταχωρητές PSC.
void mc_init_IT(void); Τροποποιήστε αυτή τη λειτουργία για να ενεργοποιήσετε ή να απενεργοποιήσετε τους τύπους διακοπών.
Void PSC0_Init (ανυπόγραφο int dt0, ανυπόγραφο int ot0, ανυπόγραφο int dt1, ανυπόγραφο int ot1); void PSC1_Init(unsigned int dt0, unsigned int ot0, unsigned int dt1, unsigned int ot1); void PSC2_Init(unsigned int dt0, unsigned int ot0, unsigned int dt1, unsigned int ot1); Το PSCx_Init επιτρέπει στο χρήστη να επιλέξει τη διαμόρφωση του ελεγκτή ισχύος (PSC) του μικροελεγκτή.
Ο βρόχος σταθεροποίησης επιλέγεται χρησιμοποιώντας δύο λειτουργίες: open (mc_set_Open_Loop()) ή κλειστό βρόχο (mc_set_Close_Loop()). Το Σχήμα 13 δείχνει έναν βρόχο σταθεροποίησης που εφαρμόζεται σε λογισμικό.

Εικόνα 13. Βρόχος σταθεροποίησης
Ο κλειστός βρόχος είναι ένας βρόχος σταθεροποίησης ταχύτητας που βασίζεται σε ελεγκτή PID.
Όπως φαίνεται νωρίτερα, ο παράγοντας Kp χρησιμοποιείται για τη σταθεροποίηση του χρόνου απόκρισης του κινητήρα. Πρώτα ορίστε τα Ki και Kd ίσα με 0. Για να λάβετε τον απαιτούμενο χρόνο απόκρισης του κινητήρα, είναι απαραίτητο να επιλέξετε την τιμή του Kp.
- Εάν ο χρόνος απόκρισης είναι πολύ μικρός, τότε αυξήστε το Kp.
- Εάν ο χρόνος απόκρισης είναι γρήγορος, αλλά όχι σταθερός, τότε μειώστε το Kp.
Εικόνα 14. Ρύθμιση Kp
Η παράμετρος Ki χρησιμοποιείται για την καταστολή του στατικού σφάλματος. Αφήστε τον συντελεστή Kp αμετάβλητο και ορίστε την παράμετρο Ki.
- Εάν το σφάλμα είναι διαφορετικό από το μηδέν, τότε αυξήστε το Ki.
- Εάν της καταστολής του σφάλματος προηγήθηκε μια ταλαντωτική διαδικασία, τότε μειώστε το Ki.

Εικόνα 15. Ρύθμιση Ki
Τα σχήματα 14 και 15 δείχνουν παραδείγματα επιλογής των σωστών παραμέτρων ελεγκτή Kp = 1, Ki = 0,5 και Kd = 0.
Ρύθμιση της παραμέτρου Kd:
- Εάν η απόδοση είναι χαμηλή, τότε αυξήστε το cd.
- Με την αστάθεια, το Kd πρέπει να μειωθεί.
Μια άλλη σημαντική παράμετρος είναι ο χρόνος μετατροπής. Πρέπει να επιλεγεί σε σχέση με τον χρόνο απόκρισης του συστήματος. Ο χρόνος μετατροπής πρέπει να είναι τουλάχιστον ο μισός από τον χρόνο απόκρισης του συστήματος (σύμφωνα με τον κανόνα Kotelnikov).
Παρέχονται δύο λειτουργίες για τη ρύθμιση του χρόνου μετατροπής (συζητήθηκε παραπάνω).
Το αποτέλεσμά τους εμφανίζεται στην καθολική μεταβλητή g_tick, η οποία ορίζεται κάθε 250 μs. Με αυτή τη μεταβλητή είναι δυνατή η προσαρμογή του χρόνου μετατροπής.
Χρήση CPU και μνήμης
Όλες οι μετρήσεις πραγματοποιούνται σε συχνότητα ταλαντωτή 8 MHz. Εξαρτώνται επίσης από τον τύπο του κινητήρα (αριθμός ζευγών πόλων). Όταν χρησιμοποιείτε κινητήρα με 5 ζεύγη πόλων, η συχνότητα σήματος στην έξοδο του αισθητήρα Hall είναι 5 φορές χαμηλότερη από την ταχύτητα του κινητήρα.
Όλα τα αποτελέσματα που φαίνονται στο σχήμα 16 λαμβάνονται χρησιμοποιώντας ένα τριφασικό 5-πολικό BKEPT με μέγιστη ταχύτητα 14.000 σ.α.λ.

Εικόνα 16. Χρήση της ταχύτητας του μικροελεγκτή
Στη χειρότερη περίπτωση, το επίπεδο φορτίου του μικροελεγκτή είναι περίπου 18% με χρόνο μετατροπής 80 ms και ταχύτητα περιστροφής 14000 rpm.
Η πρώτη εκτίμηση μπορεί να γίνει με έναν ταχύτερο κινητήρα και με την προσθήκη μιας λειτουργίας σταθεροποίησης ρεύματος. Ο χρόνος εκτέλεσης της συνάρτησης mc_regulation_loop() είναι μεταξύ 45 και 55 μs (είναι απαραίτητο να ληφθεί υπόψη ο χρόνος μετατροπής ADC περίπου 7 μs). Για αξιολόγηση επιλέχθηκε ένα BKEPT με χρόνο απόκρισης ρεύματος περίπου 2-3 ms, πέντε ζεύγη πόλων και μέγιστη ταχύτητα περιστροφής περίπου 2-3 ms.
Η μέγιστη ταχύτητα κινητήρα είναι περίπου 50.000 σ.α.λ. Εάν ο ρότορας χρησιμοποιεί 5 ζεύγη πόλων, τότε η προκύπτουσα συχνότητα εξόδου των αισθητήρων Hall θα είναι (50000 rpm/60)*5 = 4167 Hz. Η συνάρτηση mc_estimation_speed() εκτελείται σε κάθε ανερχόμενη άκρη του αισθητήρα Hall A, δηλ. κάθε 240 µs για χρόνο εκτέλεσης 31 µs.
Η συνάρτηση mc_switch_commutation() εξαρτάται από τη λειτουργία των αισθητήρων Hall. Εκτελείται όταν εμφανίζονται ακμές στην έξοδο ενός από τους τρεις αισθητήρες Hall (ακμές ανόδου ή πτώσης), έτσι δημιουργούνται έξι διακοπές στην έξοδο του αισθητήρα Hall σε μία περίοδο παλμού και η προκύπτουσα συχνότητα κλήσης συνάρτησης είναι 240/6 μs = 40 μs.
Τέλος, ο χρόνος μετατροπής του βρόχου σταθεροποίησης πρέπει να είναι τουλάχιστον ο μισός από τον χρόνο απόκρισης του κινητήρα (περίπου 1 ms).
Τα αποτελέσματα φαίνονται στο Σχήμα 17.

Εικόνα 17. Αξιολόγηση φορτίου μικροελεγκτή
Σε αυτήν την περίπτωση, το επίπεδο φορτίου του μικροελεγκτή είναι περίπου 61%.
Όλες οι μετρήσεις έγιναν με το ίδιο λογισμικό. Δεν χρησιμοποιούνται πόροι επικοινωνίας (UART, LIN...).
Υπό αυτές τις συνθήκες, χρησιμοποιείται η ακόλουθη ποσότητα μνήμης:
- 3175 byte μνήμης προγράμματος (38,7% της συνολικής μνήμης flash).
- 285 byte μνήμης δεδομένων (55,7% της συνολικής στατικής RAM).
Διαμόρφωση και χρήση ATAVRMC100
Το σχήμα 18 δείχνει ένα πλήρες διάγραμμα των διαφόρων τρόπων λειτουργίας του κιτ εκκίνησης ATAVRMC100.
Εικόνα 18. Σκοπός θυρών εισόδου/εξόδου μικροελεγκτή και τρόποι επικοινωνίας
Λειτουργία λειτουργίας
Υποστηρίζονται δύο διαφορετικοί τρόποι λειτουργίας. Ρυθμίστε τους βραχυκυκλωτήρες JP1, JP2 και JP3 σύμφωνα με το Σχήμα 19 για να επιλέξετε μία από αυτές τις λειτουργίες. Αυτή η σημείωση εφαρμογής χρησιμοποιεί μόνο λειτουργία αισθητήρα. Μια πλήρης περιγραφή του υλικού δίνεται στο εγχειρίδιο χρήστη για το κιτ ATAVRMC100.

Εικόνα 19. Επιλογή της λειτουργίας ελέγχου με χρήση αισθητήρων
Το σχήμα 19 δείχνει τις προεπιλεγμένες ρυθμίσεις βραχυκυκλωτήρα που αντιστοιχούν στη χρήση του λογισμικού που σχετίζεται με αυτήν τη σημείωση εφαρμογής.
Το πρόγραμμα που συνοδεύει την πλακέτα ATAVRMC100 υποστηρίζει δύο τρόπους λειτουργίας:
- εκκίνηση του κινητήρα στη μέγιστη ταχύτητα χωρίς εξωτερικά εξαρτήματα.
- Έλεγχος ταχύτητας κινητήρα με ένα εξωτερικό ποτενσιόμετρο.
Εικόνα 20 Σύνδεση ποτενσιόμετρου
συμπέρασμα
Αυτή η σημείωση εφαρμογής παρέχει μια λύση υλικού και λογισμικού για έναν ελεγκτή κινητήρα συνεχούς ρεύματος χωρίς ψήκτρες που βασίζεται σε αισθητήρες. Εκτός από αυτό το έγγραφο, ο πλήρης πηγαίος κώδικας είναι διαθέσιμος για λήψη.
Η βιβλιοθήκη λογισμικού περιλαμβάνει τις λειτουργίες εκκίνησης και ελέγχου της ταχύτητας οποιουδήποτε BKEPT με ενσωματωμένους αισθητήρες.
Το διάγραμμα κυκλώματος περιέχει ένα ελάχιστο από τα εξωτερικά εξαρτήματα που απαιτούνται για τον έλεγχο του BKEPT με ενσωματωμένους αισθητήρες.
Η CPU και οι δυνατότητες μνήμης του μικροελεγκτή AT90PWM3 θα επιτρέψουν στον προγραμματιστή να επεκτείνει τη λειτουργικότητα αυτής της λύσης.

Εικόνα 21. Σχηματικό διάγραμμα (μέρος 1)
Εικόνα 22. Σχηματικό διάγραμμα (μέρος 2)

Εικόνα 23. Σχηματικό διάγραμμα (μέρος 3)

Εικόνα 24. Σχηματικό διάγραμμα (μέρος 4)
Τεκμηρίωση:
Φανταστική ανακαίνιση διαμερισμάτων και ανακαίνιση εξοχικών με πολλά χρήματα.
Δημοσιεύθηκε στις 11.04.2013
Κοινόχρηστη συσκευή (Inrunner, Outrunner)
Ένας κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες αποτελείται από έναν ρότορα με μόνιμους μαγνήτες και έναν στάτορα με περιελίξεις. Υπάρχουν δύο τύποι κινητήρων: Inrunner, στο οποίο οι μαγνήτες του ρότορα βρίσκονται μέσα στον στάτορα με περιελίξεις, και Ξεπερνώντας, στο οποίο οι μαγνήτες βρίσκονται έξω και περιστρέφονται γύρω από ένα σταθερό στάτορα με περιελίξεις.

σχέδιο Inrunnerσυνήθως χρησιμοποιείται για κινητήρες υψηλής ταχύτητας με μικρό αριθμό πόλων. Ξεπερνώνταςεάν είναι απαραίτητο, προμηθευτείτε έναν κινητήρα υψηλής ροπής με σχετικά χαμηλή ταχύτητα. Δομικά, οι Inrunners είναι απλούστεροι λόγω του γεγονότος ότι ο σταθερός στάτορας μπορεί να χρησιμεύσει ως περίβλημα. Σε αυτό μπορούν να τοποθετηθούν συσκευές στερέωσης. Στην περίπτωση των Outrunners, ολόκληρο το εξωτερικό μέρος περιστρέφεται. Ο κινητήρας στερεώνεται με σταθερό άξονα ή εξαρτήματα στάτορα. Στην περίπτωση κινητήρα-τροχού, η στερέωση πραγματοποιείται για τον σταθερό άξονα του στάτορα, τα σύρματα οδηγούνται στον στάτορα μέσω του κοίλου άξονα.

μαγνήτες και πόλους
Ο αριθμός των πόλων στον ρότορα είναι ζυγός. Το σχήμα των μαγνητών που χρησιμοποιούνται είναι συνήθως ορθογώνιο. Οι κυλινδρικοί μαγνήτες χρησιμοποιούνται λιγότερο συχνά. Τοποθετούνται με εναλλασσόμενους πόλους.

Ο αριθμός των μαγνητών δεν αντιστοιχεί πάντα στον αριθμό των πόλων. Πολλοί μαγνήτες μπορούν να σχηματίσουν έναν πόλο:

Σε αυτή την περίπτωση, 8 μαγνήτες σχηματίζουν 4 πόλους. Το μέγεθος των μαγνητών εξαρτάται από τη γεωμετρία του κινητήρα και τα χαρακτηριστικά του κινητήρα. Όσο ισχυρότεροι είναι οι χρησιμοποιούμενοι μαγνήτες, τόσο μεγαλύτερη είναι η ροπή δύναμης που αναπτύσσει ο κινητήρας στον άξονα.
Οι μαγνήτες στο ρότορα στερεώνονται με ειδική κόλλα. Λιγότερο συνηθισμένα είναι τα σχέδια με βάση μαγνήτη. Το υλικό του ρότορα μπορεί να είναι μαγνητικά αγώγιμο (χάλυβας), μη μαγνητικά αγώγιμο (κράματα αλουμινίου, πλαστικά κ.λπ.), συνδυασμένο.
Περιελίξεις και δόντια
Η περιέλιξη ενός τριφασικού κινητήρα χωρίς ψήκτρες πραγματοποιείται με σύρμα χαλκού. Το σύρμα μπορεί να είναι μονοπύρηνο ή να αποτελείται από πολλούς μονωμένους πυρήνες. Ο στάτορας είναι κατασκευασμένος από πολλά φύλλα μαγνητικά αγώγιμου χάλυβα διπλωμένα μεταξύ τους.

Ο αριθμός των δοντιών του στάτορα πρέπει να διαιρεθεί με τον αριθμό των φάσεων. εκείνοι. για έναν τριφασικό κινητήρα χωρίς ψήκτρες, ο αριθμός των δοντιών του στάτη πρέπει να διαιρείται με το 3. Ο αριθμός των δοντιών του στάτορα μπορεί να είναι είτε μεγαλύτερος είτε μικρότερος από τον αριθμό των πόλων του ρότορα. Για παράδειγμα, υπάρχουν κινητήρες με σχήματα: 9 δόντια / 12 μαγνήτες. 51 δόντια / 46 μαγνήτες.

Ένας κινητήρας με στάτορα 3 δοντιών χρησιμοποιείται εξαιρετικά σπάνια. Δεδομένου ότι μόνο δύο φάσεις λειτουργούν ανά πάσα στιγμή (όταν ενεργοποιούνται από ένα αστέρι), οι μαγνητικές δυνάμεις δρουν στον ρότορα όχι ομοιόμορφα γύρω από ολόκληρη την περιφέρεια (βλ. Εικ.).

Οι δυνάμεις που δρουν στον ρότορα προσπαθούν να τον παραμορφώσουν, γεγονός που οδηγεί σε αύξηση των κραδασμών. Για να εξαλειφθεί αυτό το φαινόμενο, ο στάτορας κατασκευάζεται με μεγάλο αριθμό δοντιών και η περιέλιξη κατανέμεται στα δόντια ολόκληρης της περιφέρειας του στάτορα όσο το δυνατόν πιο ομοιόμορφα.

Σε αυτή την περίπτωση, οι μαγνητικές δυνάμεις που δρουν στον ρότορα αλληλοεξουδετερώνονται. Δεν υπάρχει ανισορροπία.

Επιλογές κατανομής περιελίξεων φάσης από δόντια στάτορα
Επιλογή περιέλιξης για 9 δόντια

Επιλογή περιέλιξης για 12 δόντια

Στα παραπάνω διαγράμματα επιλέγεται ο αριθμός των δοντιών με τέτοιο τρόπο ώστε να διαιρείται όχι μόνο με το 3. Για παράδειγμα, όταν 36 τα δόντια λογίζονται 12 δόντια ανά φάση. 12 δόντια μπορούν να κατανεμηθούν ως εξής:




Το πιο προτιμώμενο σχήμα είναι 6 ομάδες των 2 δοντιών.
Υπάρχει μοτέρ με 51 δόντια στον στάτορα! 17 δόντια ανά φάση. Το 17 είναι πρώτος αριθμός, διαιρείται μόνο με το 1 και τον εαυτό του. Πώς να κατανείμετε την περιέλιξη στα δόντια; Δυστυχώς, δεν μπορούσα να βρω παραδείγματα και τεχνικές στη βιβλιογραφία που θα βοηθούσαν στην επίλυση αυτού του προβλήματος. Αποδείχθηκε ότι η περιέλιξη κατανεμήθηκε ως εξής:

Σκεφτείτε ένα πραγματικό κύκλωμα περιέλιξης.

Λάβετε υπόψη ότι η περιέλιξη έχει διαφορετικές κατευθύνσεις περιέλιξης σε διαφορετικά δόντια. Οι διαφορετικές κατευθύνσεις περιέλιξης υποδεικνύονται με κεφαλαία και κεφαλαία γράμματα. Λεπτομέρειες σχετικά με το σχεδιασμό των περιελίξεων μπορείτε να βρείτε στη βιβλιογραφία που προσφέρεται στο τέλος του άρθρου.
Η κλασική περιέλιξη εκτελείται με ένα καλώδιο για μία φάση. Εκείνοι. όλες οι περιελίξεις στα δόντια μιας φάσης συνδέονται σε σειρά.

Οι περιελίξεις των δοντιών μπορούν επίσης να συνδεθούν παράλληλα.

Μπορούν επίσης να συνδυαστούν εγκλείσματα

Η παράλληλη και συνδυασμένη σύνδεση επιτρέπει τη μείωση της αυτεπαγωγής της περιέλιξης, η οποία οδηγεί σε αύξηση του ρεύματος του στάτη (άρα και της ισχύος) και της ταχύτητας του κινητήρα.
Κυλήσεις ηλεκτρικών και πραγματικών
Εάν ο ρότορας του κινητήρα έχει δύο πόλους, τότε με μία πλήρη περιστροφή του μαγνητικού πεδίου στον στάτορα, ο ρότορας κάνει μία πλήρη στροφή. Με 4 πόλους, χρειάζονται δύο στροφές του μαγνητικού πεδίου στον στάτορα για να περιστραφεί ο άξονας του κινητήρα μία πλήρη στροφή. Όσο μεγαλύτερος είναι ο αριθμός των πόλων του ρότορα, τόσο περισσότερες ηλεκτρικές στροφές απαιτούνται για την περιστροφή του άξονα του κινητήρα κατά μία περιστροφή. Για παράδειγμα, έχουμε 42 μαγνήτες στον ρότορα. Για να γυρίσετε τον ρότορα μία περιστροφή, απαιτούνται 42/2 = 21 ηλεκτρικές στροφές. Αυτή η ιδιότητα μπορεί να χρησιμοποιηθεί ως ένα είδος μειωτήρα. Επιλέγοντας τον απαιτούμενο αριθμό πόλων, μπορείτε να αποκτήσετε έναν κινητήρα με τα επιθυμητά χαρακτηριστικά ταχύτητας. Επιπλέον, η κατανόηση αυτής της διαδικασίας θα είναι απαραίτητη για εμάς στο μέλλον, κατά την επιλογή των παραμέτρων του ελεγκτή.
Αισθητήρες θέσης
Ο σχεδιασμός των κινητήρων χωρίς αισθητήρες διαφέρει από τους κινητήρες με αισθητήρες μόνο ελλείψει των τελευταίων. Δεν υπάρχουν άλλες θεμελιώδεις διαφορές. Οι πιο συνηθισμένοι αισθητήρες θέσης που βασίζονται στο φαινόμενο Hall. Οι αισθητήρες ανταποκρίνονται σε ένα μαγνητικό πεδίο, συνήθως βρίσκονται στον στάτορα με τέτοιο τρόπο ώστε να επηρεάζονται από τους μαγνήτες του ρότορα. Η γωνία μεταξύ των αισθητήρων πρέπει να είναι 120 μοίρες.

Σημαίνει «ηλεκτρικές» μοίρες. Εκείνοι. για έναν πολυπολικό κινητήρα, η φυσική διάταξη των αισθητήρων θα μπορούσε να είναι:


Μερικές φορές οι αισθητήρες βρίσκονται έξω από τον κινητήρα. Εδώ είναι ένα παράδειγμα της θέσης των αισθητήρων. Στην πραγματικότητα, ήταν ένας κινητήρας χωρίς αισθητήρες. Με τόσο απλό τρόπο, ήταν εξοπλισμένο με αισθητήρες χωλ.

Σε ορισμένους κινητήρες, οι αισθητήρες είναι τοποθετημένοι σε μια ειδική συσκευή που σας επιτρέπει να μετακινείτε τους αισθητήρες εντός ορισμένων ορίων. Με τη βοήθεια μιας τέτοιας συσκευής, ρυθμίζεται ο χρονισμός. Ωστόσο, εάν ο κινητήρας πρέπει να αντιστραφεί, θα απαιτηθεί ένα δεύτερο σετ αισθητήρων που έχουν ρυθμιστεί στην όπισθεν. Δεδομένου ότι ο χρονισμός δεν είναι κρίσιμος στην εκκίνηση και στις χαμηλές στροφές, μπορείτε να ρυθμίσετε τους αισθητήρες στο σημείο μηδέν και να ρυθμίσετε τη γωνία απαγωγής προγραμματικά όταν ο κινητήρας αρχίσει να περιστρέφεται.
Κύρια χαρακτηριστικά του κινητήρα
Κάθε κινητήρας υπολογίζεται για συγκεκριμένες απαιτήσεις και έχει τα ακόλουθα κύρια χαρακτηριστικά:
- Λειτουργία λειτουργίαςγια τον οποίο έχει σχεδιαστεί ο κινητήρας: μακροπρόθεσμα ή βραχυπρόθεσμα. ΜακρύςΟ τρόπος λειτουργίας υποδηλώνει ότι ο κινητήρας μπορεί να λειτουργεί για ώρες. Τέτοιοι κινητήρες υπολογίζονται με τέτοιο τρόπο ώστε η μεταφορά θερμότητας στο περιβάλλον να είναι υψηλότερη από την απελευθέρωση θερμότητας του ίδιου του κινητήρα. Σε αυτή την περίπτωση, δεν θα ζεσταθεί. Παράδειγμα: εξαερισμός, κυλιόμενη σκάλα ή κίνηση μεταφοράς. βραχυπρόθεσμα -σημαίνει ότι ο κινητήρας θα ανάψει για ένα σύντομο χρονικό διάστημα κατά το οποίο δεν θα έχει χρόνο να ζεσταθεί στη μέγιστη θερμοκρασία, ακολουθούμενο από ένα μεγάλο χρονικό διάστημα κατά το οποίο ο κινητήρας έχει χρόνο να κρυώσει. Παράδειγμα: κίνηση ανελκυστήρα, ηλεκτρικές ξυριστικές μηχανές, πιστολάκια μαλλιών.
- Αντίσταση περιέλιξης κινητήρα. Η αντίσταση περιέλιξης κινητήρα επηρεάζει την απόδοση του κινητήρα. Όσο μικρότερη είναι η αντίσταση, τόσο μεγαλύτερη είναι η απόδοση. Μετρώντας την αντίσταση, μπορείτε να μάθετε την παρουσία ενός κυκλώματος διακοπής στην περιέλιξη. Η αντίσταση περιέλιξης κινητήρα είναι χιλιοστά του ωμ. Για τη μέτρησή του απαιτείται ειδική συσκευή ή ειδική τεχνική μέτρησης.
- Μέγιστη τάση λειτουργίας. Η μέγιστη τάση που μπορεί να αντέξει η περιέλιξη του στάτη. Η μέγιστη τάση σχετίζεται με την ακόλουθη παράμετρο.
- Μέγιστες στροφές ανά λεπτό. Μερικές φορές δεν υποδεικνύουν τη μέγιστη ταχύτητα, αλλά kv-ο αριθμός των στροφών του κινητήρα ανά βολτ χωρίς φορτίο στον άξονα. Πολλαπλασιάζοντας αυτόν τον αριθμό με τη μέγιστη τάση, παίρνουμε τη μέγιστη ταχύτητα κινητήρα χωρίς φορτίο στον άξονα.
- Μέγιστο ρεύμα. Το μέγιστο επιτρεπόμενο ρεύμα περιέλιξης. Κατά κανόνα, υποδεικνύεται επίσης ο χρόνος κατά τον οποίο ο κινητήρας μπορεί να αντέξει το καθορισμένο ρεύμα. Ο μέγιστος περιορισμός ρεύματος σχετίζεται με πιθανή υπερθέρμανση της περιέλιξης. Επομένως, σε χαμηλές θερμοκρασίες περιβάλλοντος, ο πραγματικός χρόνος λειτουργίας με μέγιστο ρεύμα θα είναι μεγαλύτερος και σε ζεστό καιρό ο κινητήρας θα καεί νωρίτερα.
- Μέγιστη ισχύς κινητήρα.Σχετίζεται άμεσα με την προηγούμενη παράμετρο. Αυτή είναι η μέγιστη ισχύς που μπορεί να αναπτύξει ο κινητήρας για μικρό χρονικό διάστημα, συνήθως μερικά δευτερόλεπτα. Με παρατεταμένη λειτουργία στη μέγιστη ισχύ, η υπερθέρμανση του κινητήρα και η αστοχία του είναι αναπόφευκτες.
- Ονομαστική ισχύς. Η ισχύς που μπορεί να αναπτύξει ο κινητήρας καθ' όλη τη διάρκεια της ενεργοποίησης.
- Γωνία προώθησης φάσης (χρονομέτρηση). Η περιέλιξη του στάτορα έχει κάποια επαγωγή, η οποία επιβραδύνει την αύξηση του ρεύματος στην περιέλιξη. Το ρεύμα θα φτάσει στο μέγιστο μετά από λίγο. Για να αντισταθμιστεί αυτή η καθυστέρηση, η εναλλαγή φάσης πραγματοποιείται με κάποια προκαταβολή. Παρόμοια με την ανάφλεξη σε κινητήρα εσωτερικής καύσης, όπου ο χρονισμός ανάφλεξης ρυθμίζεται λαμβάνοντας υπόψη τον χρόνο ανάφλεξης του καυσίμου.
Θα πρέπει επίσης να δώσετε προσοχή στο γεγονός ότι με το ονομαστικό φορτίο δεν θα έχετε τη μέγιστη ταχύτητα στον άξονα του κινητήρα. kvενδείκνυται για κινητήρα χωρίς φορτίο. Κατά την τροφοδοσία του κινητήρα από μπαταρίες, θα πρέπει να ληφθεί υπόψη η «βύθιση» της τάσης τροφοδοσίας υπό φορτίο, η οποία με τη σειρά της θα μειώσει επίσης τις μέγιστες στροφές του κινητήρα.
Σίγουρα κάθε αρχάριος που συνέδεσε για πρώτη φορά τη ζωή του με τηλεκατευθυνόμενα ηλεκτρικά μοντέλα, μετά από ενδελεχή μελέτη του γεμίσματος, έχει μια απορία. Τι είναι ο συλλέκτης (Brushed) και; Ποιο είναι καλύτερο να βάλετε στο ραδιοελεγχόμενο ηλεκτρικό μοντέλο σας;
Οι βουρτσισμένοι κινητήρες που χρησιμοποιούνται τόσο συχνά για την τροφοδοσία ραδιοελεγχόμενων ηλεκτρικών μοντέλων έχουν μόνο δύο εξερχόμενα καλώδια ισχύος. Το ένα από αυτά είναι "+" το άλλο είναι "-". Με τη σειρά τους, συνδέονται με τον ελεγκτή ταχύτητας. Έχοντας αποσυναρμολογήσει τον κινητήρα του συλλέκτη, θα βρείτε πάντα εκεί 2 καμπυλωτούς μαγνήτες, έναν άξονα μαζί με μια άγκυρα, πάνω στον οποίο τυλίγεται ένα χάλκινο νήμα (σύρμα), όπου ένα γρανάζι βρίσκεται στη μία πλευρά του άξονα και στην άλλη πλευρά εκεί είναι ένας συλλέκτης συναρμολογημένος από πλάκες, οι οποίες περιλαμβάνουν καθαρό χαλκό.
Η αρχή της λειτουργίας του κινητήρα συλλέκτη
Το ηλεκτρικό ρεύμα (DC ή συνεχές ρεύμα), που ρέει στις περιελίξεις του οπλισμού (ανάλογα με τον αριθμό τους για το καθένα με τη σειρά του) δημιουργεί ένα ηλεκτρομαγνητικό πεδίο σε αυτά, το οποίο έχει έναν νότιο πόλο στη μία πλευρά και έναν βόρειο πόλο από την άλλη.
Πολλοί άνθρωποι γνωρίζουν ότι αν πάρετε δύο μαγνήτες και τους συνδέσετε ομώνυμους στύλουςο ένας στον άλλο, τότε δεν θα έρθουν μαζί για τίποτα, και αν συνδέονται με αντίθετα ονόματα, τότε θα κολλήσουν έτσι ώστε να μην είναι πάντα δυνατό να τα χωρίσουν.
Έτσι, αυτό το ηλεκτρομαγνητικό πεδίο, που εμφανίζεται σε οποιαδήποτε από τις περιελίξεις του οπλισμού, αλληλεπιδρώντας με κάθε έναν από τους πόλους των μαγνητών του στάτη, οδηγεί (περιστρέφει) τον ίδιο τον οπλισμό. Περαιτέρω, το ρεύμα περνά μέσα από τον συλλέκτη και βουρτσίζει στην επόμενη περιέλιξη, και έτσι διαδοχικά, περνώντας από τη μια περιέλιξη οπλισμού στην άλλη, ο άξονας του κινητήρα περιστρέφεται μαζί με τον οπλισμό, αλλά μόνο όσο εφαρμόζεται τάση σε αυτόν.
Σε έναν τυπικό κινητήρα συλλέκτη, ο οπλισμός έχει τρεις πόλους (τρεις περιελίξεις) - αυτό γίνεται έτσι ώστε ο κινητήρας να μην "κολλάει" σε μία θέση.
Μειονεκτήματα των κινητήρων συλλεκτών
Από μόνοι τους, οι κινητήρες συλλεκτών κάνουν καλή δουλειά με τη δουλειά τους, αλλά αυτό συμβαίνει μόνο μέχρι τη στιγμή που καταστεί απαραίτητο να ληφθεί η υψηλότερη δυνατή ταχύτητα από αυτούς στην έξοδο. Είναι όλα σχετικά με τα ίδια τα πινέλα που αναφέρθηκαν παραπάνω. Δεδομένου ότι βρίσκονται πάντα σε στενή επαφή με τον συλλέκτη, ως αποτέλεσμα των υψηλών ταχυτήτων, εμφανίζεται τριβή στο σημείο επαφής τους, η οποία στο μέλλον θα προκαλέσει γρήγορη φθορά και των δύο και στη συνέχεια θα οδηγήσει σε απώλεια πραγματικής ηλεκτρικής ισχύος. κινητήρας. Αυτό είναι το πιο σημαντικό μειονέκτημα τέτοιων κινητήρων, το οποίο ακυρώνει όλες τις θετικές του ιδιότητες.
Η αρχή της λειτουργίας ενός κινητήρα χωρίς ψήκτρες
Εδώ ισχύει το αντίθετο, τα μοτέρ του τύπου δεν έχουν και βούρτσες και συλλέκτη. Οι μαγνήτες σε αυτά βρίσκονται αυστηρά γύρω από τον άξονα και λειτουργούν ως ρότορας. Περιελίξεις που έχουν ήδη αρκετούς μαγνητικούς πόλους τοποθετούνται γύρω του. Ένας λεγόμενος αισθητήρας (αισθητήρας) είναι εγκατεστημένος στον ρότορα των κινητήρων χωρίς ψήκτρες, ο οποίος θα ελέγχει τη θέση του και θα μεταδίδει αυτές τις πληροφορίες στον επεξεργαστή που λειτουργεί σε συνδυασμό με τον ελεγκτή ταχύτητας περιστροφής (η ανταλλαγή δεδομένων στη θέση του ρότορα γίνεται περισσότερο από 100 φορές το δευτερόλεπτο). Ως αποτέλεσμα, έχουμε μια πιο ομαλή λειτουργία του ίδιου του κινητήρα με μέγιστη απόδοση.
Οι κινητήρες χωρίς ψήκτρες μπορούν να είναι με αισθητήρα (αισθητήρα) και χωρίς αυτόν. Η απουσία αισθητήρα μειώνει ελαφρώς την απόδοση του κινητήρα, επομένως η απουσία τους είναι απίθανο να ενοχλήσει έναν αρχάριο, αλλά από την άλλη, η τιμή θα σας εκπλήξει ευχάριστα. Είναι εύκολο να τα ξεχωρίσεις μεταξύ τους. Για κινητήρες με αισθητήρα, εκτός από 3 χοντρά καλώδια ρεύματος, υπάρχει και ένας επιπλέον βρόχος λεπτών που πηγαίνουν στον ελεγκτή ταχύτητας. Δεν αξίζει να κυνηγάτε κινητήρες με αισθητήρα τόσο για αρχάριους όσο και για ερασιτέχνη, γιατί μόνο οι επαγγελματίες θα εκτιμήσουν τις δυνατότητές τους και οι υπόλοιποι απλώς θα πληρώσουν υπερβολικά και σημαντικά.
Πλεονεκτήματα των κινητήρων χωρίς ψήκτρες
Σχεδόν καθόλου φθαρμένα εξαρτήματα. Γιατί "σχεδόν", επειδή ο άξονας του ρότορα είναι τοποθετημένος σε ρουλεμάν, τα οποία, με τη σειρά τους, τείνουν να φθείρονται, αλλά ο πόρος τους είναι εξαιρετικά μεγάλος και η εναλλαξιμότητα τους είναι πολύ απλή. Αυτοί οι κινητήρες είναι πολύ αξιόπιστοι και αποδοτικοί. Έχει τοποθετηθεί ένας αισθητήρας θέσης ρότορα. Στους κινητήρες συλλεκτών, η λειτουργία των βουρτσών συνοδεύεται πάντα από σπινθήρες, οι οποίοι στη συνέχεια προκαλούν παρεμβολές στη λειτουργία του ραδιοεξοπλισμού. Άρα, για συλλεκτικά, όπως ήδη καταλάβατε, αυτά τα προβλήματα αποκλείονται. Χωρίς τριβή, χωρίς υπερθέρμανση, κάτι που είναι επίσης σημαντικό πλεονέκτημα. Σε σύγκριση με τους κινητήρες συλλεκτών, δεν απαιτούν πρόσθετη συντήρηση κατά τη λειτουργία.
Μειονεκτήματα των κινητήρων χωρίς ψήκτρες
Αυτοί οι κινητήρες έχουν μόνο ένα μείον, αυτή είναι η τιμή. Αλλά αν το κοιτάξετε από την άλλη πλευρά και λάβετε υπόψη το γεγονός ότι η λειτουργία απαλλάσσει τον ιδιοκτήτη αμέσως από τέτοια προβλήματα όπως η αντικατάσταση ελατηρίων, αγκυρίων, βουρτσών, συλλεκτών, τότε μπορείτε εύκολα να προτιμήσετε το τελευταίο.
Πρόσφατα, οι κινητήρες συνεχούς ρεύματος χωρίς ψήκτρες έχουν γίνει όλο και πιο δημοφιλείς. Χρησιμοποιούνται ενεργά σε όργανα, βιομηχανικούς ιατρικούς και οικιακούς αυτοματισμούς, καθώς και σε όργανα. Αυτός ο τύπος κινητήρα λειτουργεί χωρίς βούρτσες, όλες οι εναλλαγές γίνονται με χρήση ηλεκτρονικών συσκευών.
Πλεονεκτήματα των κινητήρων χωρίς ψήκτρες
Οι κινητήρες χωρίς ψήκτρες έχουν μια σειρά από πλεονεκτήματα που έχουν καθορίσει τους τομείς εφαρμογής τους. Έχουν την καλύτερη απόδοση. Η ροπή τους είναι πολύ μεγαλύτερη από τους συμβατικούς κινητήρες. Τα σχέδια χωρίς ψήκτρες χαρακτηρίζονται από υψηλότερη δυναμική απόδοση και αποτελεσματικότητα.
Άλλα πλεονεκτήματα περιλαμβάνουν πιο αθόρυβη λειτουργία, μεγαλύτερη διάρκεια ζωής και υψηλότερες ταχύτητες περιστροφής. Ο λόγος μεγέθους κινητήρα προς ροπή είναι υψηλότερος από άλλους τύπους. Αυτό είναι ιδιαίτερα σημαντικό σε περιοχές όπου το μέγεθος και το βάρος είναι κρίσιμοι παράγοντες.
Αρχή λειτουργίας κινητήρα χωρίς ψήκτρες
Η αρχή λειτουργίας βασίζεται στα μαγνητικά πεδία που παράγονται από τον στάτορα και τον ρότορα, η ταχύτητα περιστροφής των οποίων είναι η ίδια. Δεν υπάρχει το λεγόμενο χαρακτηριστικό ολίσθησης των ασύγχρονων κινητήρων. Η διαμόρφωση των κινητήρων χωρίς ψήκτρες είναι μονοφασική, διφασική ή τριφασική. Ο αριθμός των περιελίξεων στον στάτορα εξαρτάται από αυτό. Οι πιο διαδεδομένοι σε όλους τους τομείς είναι οι τριφασικοί κινητήρες.
Συσκευή κινητήρα χωρίς ψήκτρες
Για παράδειγμα, εξετάστε τον πιο δημοφιλή τριφασικό κινητήρα χωρίς ψήκτρες. Διαθέτει στάτορα από πλαστικοποιημένο χάλυβα, στα αυλάκια του οποίου τοποθετείται η περιέλιξη. Οι περισσότεροι κινητήρες αυτού του τύπου έχουν τρεις περιελίξεις συνδεδεμένες σε ένα αστέρι.

Ο ρότορας είναι ένας μόνιμος μαγνήτης με 2 έως 8 ζεύγη πόλων. Ταυτόχρονα, ο Νότιος και ο Βόρειος πόλος εναλλάσσονται μεταξύ τους. Ο ρότορας είναι κατασκευασμένος από ειδικό μαγνητικό υλικό που παρέχει την απαιτούμενη πυκνότητα μαγνητικού πεδίου. Κατά κανόνα, πρόκειται για μαγνήτες φερρίτη, από τους οποίους κατασκευάζονται μόνιμοι μαγνήτες.
Σε αντίθεση με τους συμβατικούς ηλεκτρικούς κινητήρες, οι κινητήρες συνεχούς ρεύματος χωρίς ψήκτρες μετατρέπονται ηλεκτρονικά. Αυτό οφείλεται στην ανάγκη να παρέχεται σταθερή τάση στις περιελίξεις του στάτη. Ταυτόχρονα, είναι απαραίτητο να γνωρίζουμε σε ποια θέση βρίσκεται ο ρότορας. Η θέση αυτή καθορίζεται από αισθητήρες Hall, οι οποίοι δίνουν υψηλό ή χαμηλό σήμα, ανάλογα με το ποιος πόλος περνά κοντά στα πολύ ευαίσθητα στοιχεία.
Γεννήτρια DC χωρίς ψήκτρες
Ένας κινητήρας συνεχούς ρεύματος είναι ένας ηλεκτροκινητήρας που τροφοδοτείται από συνεχές ρεύμα. Εάν είναι απαραίτητο, προμηθευτείτε έναν κινητήρα υψηλής ροπής με σχετικά χαμηλή ταχύτητα. Δομικά, οι Inrunners είναι απλούστεροι λόγω του γεγονότος ότι ο σταθερός στάτορας μπορεί να χρησιμεύσει ως περίβλημα. Σε αυτό μπορούν να τοποθετηθούν συσκευές στερέωσης. Στην περίπτωση των Outrunners, ολόκληρο το εξωτερικό μέρος περιστρέφεται. Ο κινητήρας στερεώνεται με σταθερό άξονα ή εξαρτήματα στάτορα. Στην περίπτωση κινητήρα-τροχού, η στερέωση πραγματοποιείται για τον σταθερό άξονα του στάτορα, τα σύρματα φέρονται στον στάτορα μέσω ενός κοίλου άξονα του οποίου είναι μικρότερος από 0,5 mm.

Ένας κινητήρας AC ονομάζεται ηλεκτροκινητήρας που τροφοδοτείται από εναλλασσόμενο ρεύμα. Υπάρχουν οι ακόλουθοι τύποι κινητήρων AC:

Υπάρχει επίσης ένα UKD (universal commutator motor) με τη λειτουργία του τρόπου λειτουργίας τόσο σε εναλλασσόμενο όσο και σε συνεχές ρεύμα.
Ένας άλλος τύπος κινητήρα είναι βηματικός κινητήρας με πεπερασμένο αριθμό θέσεων ρότορα. Μια ορισμένη υποδεικνυόμενη θέση του ρότορα καθορίζεται με την παροχή ισχύος στις απαραίτητες αντίστοιχες περιελίξεις. Όταν η τάση τροφοδοσίας αφαιρείται από μια περιέλιξη και μεταφέρεται σε άλλες, εμφανίζεται μια διαδικασία μετάβασης σε άλλη θέση.
Ένας κινητήρας AC όταν τροφοδοτείται από ένα εμπορικό δίκτυο συνήθως δεν επιτυγχάνει ταχύτητες άνω των τριών χιλιάδων στροφών ανά λεπτό. Για το λόγο αυτό, όταν είναι απαραίτητο να ληφθούν υψηλότερες συχνότητες, χρησιμοποιείται ένας κινητήρας συλλέκτη, τα πρόσθετα πλεονεκτήματα του οποίου είναι η ελαφρότητα και η συμπαγή διατηρώντας την απαιτούμενη ισχύ.
 Μερικές φορές χρησιμοποιείται επίσης ένας ειδικός μηχανισμός μετάδοσης που ονομάζεται πολλαπλασιαστής, ο οποίος αλλάζει τις κινηματικές παραμέτρους της συσκευής στους απαιτούμενους τεχνικούς δείκτες. Τα συγκροτήματα συλλεκτών καταλαμβάνουν μερικές φορές έως και το μισό χώρο ολόκληρου του κινητήρα, έτσι οι κινητήρες AC μειώνονται σε μέγεθος και γίνονται ελαφρύτεροι σε βάρος μέσω της χρήσης ενός μετατροπέα συχνότητας και μερικές φορές λόγω της παρουσίας ενός δικτύου με αυξημένη συχνότητα έως και 400 Hz.
Μερικές φορές χρησιμοποιείται επίσης ένας ειδικός μηχανισμός μετάδοσης που ονομάζεται πολλαπλασιαστής, ο οποίος αλλάζει τις κινηματικές παραμέτρους της συσκευής στους απαιτούμενους τεχνικούς δείκτες. Τα συγκροτήματα συλλεκτών καταλαμβάνουν μερικές φορές έως και το μισό χώρο ολόκληρου του κινητήρα, έτσι οι κινητήρες AC μειώνονται σε μέγεθος και γίνονται ελαφρύτεροι σε βάρος μέσω της χρήσης ενός μετατροπέα συχνότητας και μερικές φορές λόγω της παρουσίας ενός δικτύου με αυξημένη συχνότητα έως και 400 Hz.
Ο πόρος οποιουδήποτε ασύγχρονου κινητήρα AC είναι αισθητά υψηλότερος από τον συλλεκτικό. Καθορίζεται κατάσταση μόνωσης περιελίξεων και ρουλεμάν. Ένας σύγχρονος κινητήρας, όταν χρησιμοποιείται ένας μετατροπέας και ένας αισθητήρας θέσης ρότορα, θεωρείται ηλεκτρονικό ανάλογο ενός κλασικού κινητήρα συλλέκτη που υποστηρίζει τη λειτουργία DC.
Κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες. Γενικές πληροφορίες και συσκευή συσκευής
 Ένας κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες ονομάζεται επίσης τριφασικός κινητήρας χωρίς ψήκτρες. Είναι μια σύγχρονη συσκευή, η αρχή λειτουργίας της οποίας βασίζεται σε αυτοσυγχρονισμένη ρύθμιση συχνότητας, λόγω της οποίας ελέγχεται το διάνυσμα (ξεκινώντας από τη θέση του ρότορα) του μαγνητικού πεδίου του στάτορα.
Ένας κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες ονομάζεται επίσης τριφασικός κινητήρας χωρίς ψήκτρες. Είναι μια σύγχρονη συσκευή, η αρχή λειτουργίας της οποίας βασίζεται σε αυτοσυγχρονισμένη ρύθμιση συχνότητας, λόγω της οποίας ελέγχεται το διάνυσμα (ξεκινώντας από τη θέση του ρότορα) του μαγνητικού πεδίου του στάτορα.
Αυτοί οι τύποι ελεγκτών κινητήρα τροφοδοτούνται συχνά από τάση συνεχούς ρεύματος, εξ ου και το όνομα. Στην αγγλόφωνη τεχνική βιβλιογραφία, ο κινητήρας χωρίς ψήκτρες ονομάζεται PMSM ή BLDC.
Ο κινητήρας χωρίς ψήκτρες δημιουργήθηκε κυρίως για τη βελτιστοποίηση του οποιονδήποτε κινητήρα DCγενικά. Υπήρξαν πολύ υψηλές απαιτήσεις στον ενεργοποιητή μιας τέτοιας συσκευής (ειδικά σε ένα μικροδίσκο υψηλής ταχύτητας με ακριβή τοποθέτηση).
Αυτό, ίσως, οδήγησε στη χρήση τέτοιων ειδικών συσκευών DC, τριφασικών κινητήρων χωρίς ψήκτρες, που ονομάζονται επίσης BLDT. Από τη σχεδίασή τους, είναι σχεδόν πανομοιότυποι με τους σύγχρονους κινητήρες εναλλασσόμενου ρεύματος, όπου η περιστροφή του μαγνητικού ρότορα συμβαίνει σε έναν συμβατικό πολυστρωματικό στάτορα παρουσία τριφασικών περιελίξεων και ο αριθμός των στροφών εξαρτάται από την τάση και τα φορτία του στάτορα. Με βάση ορισμένες συντεταγμένες του ρότορα, αλλάζουν διαφορετικές περιελίξεις στάτορα.
 Οι κινητήρες συνεχούς ρεύματος χωρίς ψήκτρες μπορούν να υπάρχουν χωρίς ξεχωριστούς αισθητήρες, ωστόσο, μερικές φορές υπάρχουν στον ρότορα, όπως ένας αισθητήρας Hall. Εάν η συσκευή λειτουργεί χωρίς πρόσθετο αισθητήρα, τότε Οι περιελίξεις του στάτορα λειτουργούν ως στοιχείο στερέωσης. Τότε το ρεύμα προκύπτει λόγω της περιστροφής του μαγνήτη, όταν ο ρότορας προκαλεί ένα EMF στην περιέλιξη του στάτη.
Οι κινητήρες συνεχούς ρεύματος χωρίς ψήκτρες μπορούν να υπάρχουν χωρίς ξεχωριστούς αισθητήρες, ωστόσο, μερικές φορές υπάρχουν στον ρότορα, όπως ένας αισθητήρας Hall. Εάν η συσκευή λειτουργεί χωρίς πρόσθετο αισθητήρα, τότε Οι περιελίξεις του στάτορα λειτουργούν ως στοιχείο στερέωσης. Τότε το ρεύμα προκύπτει λόγω της περιστροφής του μαγνήτη, όταν ο ρότορας προκαλεί ένα EMF στην περιέλιξη του στάτη.
Εάν μια από τις περιελίξεις είναι απενεργοποιημένη, τότε το σήμα που προκλήθηκε θα μετρηθεί και θα υποβληθεί σε περαιτέρω επεξεργασία, ωστόσο, μια τέτοια αρχή λειτουργίας είναι αδύνατη χωρίς έναν καθηγητή επεξεργασίας σήματος. Αλλά για να αντιστρέψετε ή να φρενάρετε έναν τέτοιο ηλεκτροκινητήρα, δεν χρειάζεται ένα κύκλωμα γέφυρας - θα αρκεί η παροχή παλμών ελέγχου με την αντίστροφη σειρά στις περιελίξεις του στάτη.
Στο VD (με μεταγωγή κινητήρα), ο επαγωγέας με τη μορφή μόνιμου μαγνήτη βρίσκεται στον ρότορα και η περιέλιξη του οπλισμού βρίσκεται στον στάτορα. Με βάση τη θέση του ρότορα, σχηματίζεται η τάση τροφοδοσίας όλων των περιελίξεωνηλεκτρικός κινητήρας. Όταν χρησιμοποιείται σε τέτοιες κατασκευές του συλλέκτη, η λειτουργία του θα εκτελείται στον κινητήρα της βαλβίδας από έναν διακόπτη ημιαγωγών.
Η κύρια διαφορά μεταξύ των σύγχρονων και των κινητήρων χωρίς ψήκτρες είναι ο αυτοσυγχρονισμός των τελευταίων με τη βοήθεια του DPR, που καθορίζει την αναλογική συχνότητα περιστροφής του ρότορα και του πεδίου.
Τις περισσότερες φορές, ένας κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες βρίσκει εφαρμογή στους ακόλουθους τομείς:

στάτωρ
Αυτή η συσκευή έχει κλασικό σχεδιασμό και μοιάζει με την ίδια συσκευή ενός ασύγχρονου μηχανήματος. Η σύνθεση περιλαμβάνει πυρήνας περιέλιξης χαλκού(που τοποθετείται περιμετρικά στις αυλακώσεις), που καθορίζει τον αριθμό των φάσεων και το περίβλημα. Συνήθως, οι φάσεις ημιτονοειδούς και συνημιτόνου επαρκούν για περιστροφή και αυτοεκκίνηση, ωστόσο, συχνά ο κινητήρας της βαλβίδας είναι τριφασικός και ακόμη και τετραφασικός.
Οι ηλεκτρικοί κινητήρες με αντίστροφη ηλεκτροκινητική δύναμη ανάλογα με τον τύπο της περιέλιξης στην περιέλιξη του στάτη χωρίζονται σε δύο τύπους:
- ημιτονοειδής μορφή?
- τραπεζοειδές σχήμα.
Στους αντίστοιχους τύπους κινητήρα, το ρεύμα ηλεκτρικής φάσης αλλάζει επίσης ανάλογα με τη μέθοδο τροφοδοσίας ημιτονοειδή ή τραπεζοειδή.
Στροφείο
 Συνήθως ο ρότορας είναι κατασκευασμένος από μόνιμους μαγνήτες με δύο έως οκτώ ζεύγη πόλων, οι οποίοι, με τη σειρά τους, εναλλάσσονται από βορρά προς νότο ή αντίστροφα.
Συνήθως ο ρότορας είναι κατασκευασμένος από μόνιμους μαγνήτες με δύο έως οκτώ ζεύγη πόλων, οι οποίοι, με τη σειρά τους, εναλλάσσονται από βορρά προς νότο ή αντίστροφα.
Οι πιο συνηθισμένοι και φθηνότεροι για την κατασκευή του ρότορα είναι οι μαγνήτες φερρίτη, αλλά το μειονέκτημά τους είναι χαμηλό επίπεδο μαγνητικής επαγωγής, επομένως, συσκευές κατασκευασμένες από κράματα διαφόρων στοιχείων σπάνιων γαιών αντικαθιστούν τώρα αυτό το υλικό, καθώς μπορούν να παρέχουν υψηλό επίπεδο μαγνητικής επαγωγής, η οποία, με τη σειρά της, επιτρέπει τη μείωση του μεγέθους του ρότορα.
DPR
Ο αισθητήρας θέσης ρότορα παρέχει ανάδραση. Σύμφωνα με την αρχή της λειτουργίας, η συσκευή χωρίζεται στα ακόλουθα υποείδη:
- επαγωγικός;
- φωτοηλεκτρικός;
- Αισθητήρας εφέ Hall.
Ο τελευταίος τύπος είναι ο πιο δημοφιλής λόγω του σχεδόν απόλυτες ιδιότητες χωρίς αδράνειακαι τη δυνατότητα να απαλλαγείτε από την καθυστέρηση στα κανάλια ανάδρασης από τη θέση του ρότορα.
Σύστημα ελέγχου
Το σύστημα ελέγχου αποτελείται από διακόπτες ισχύος, μερικές φορές επίσης από θυρίστορ ή τρανζίστορ ισχύος, συμπεριλαμβανομένης μιας μονωμένης πύλης, που οδηγεί στη συλλογή ενός μετατροπέα ρεύματος ή ενός μετατροπέα τάσης. Η διαδικασία διαχείρισης αυτών των κλειδιών εφαρμόζεται συχνότερα με τη χρήση μικροελεγκτή, το οποίο απαιτεί τεράστιο όγκο υπολογιστικών λειτουργιών για τον έλεγχο του κινητήρα.
Αρχή λειτουργίας
Η λειτουργία του κινητήρα έγκειται στο γεγονός ότι ο ελεγκτής αλλάζει έναν ορισμένο αριθμό περιελίξεων στάτορα με τέτοιο τρόπο ώστε το διάνυσμα των μαγνητικών πεδίων του ρότορα και του στάτορα να είναι ορθογώνιο. Με PWM (Διαμόρφωση πλάτους παλμού) ο ελεγκτής ελέγχει το ρεύμα που διαρρέει τον κινητήρακαι ρυθμίζει τη ροπή που ασκείται στον ρότορα. Η κατεύθυνση αυτής της ροπής δράσης καθορίζεται από το σημάδι της γωνίας μεταξύ των διανυσμάτων. Οι ηλεκτρικοί βαθμοί χρησιμοποιούνται στους υπολογισμούς.
 Η εναλλαγή πρέπει να πραγματοποιείται με τέτοιο τρόπο ώστε Φ0 (ροή διέγερσης ρότορα) να διατηρείται σταθερή σε σχέση με τη ροή του οπλισμού. Όταν μια τέτοια διέγερση και η ροή του οπλισμού αλληλεπιδρούν, σχηματίζεται μια ροπή M, η οποία τείνει να περιστρέφει τον ρότορα και παράλληλα να διασφαλίζει τη σύμπτωση της διέγερσης και της ροής του οπλισμού. Ωστόσο, κατά την περιστροφή του ρότορα, οι διάφορες περιελίξεις εναλλάσσονται υπό την επίδραση του αισθητήρα θέσης του ρότορα, με αποτέλεσμα η ροή του οπλισμού να στρέφεται προς το επόμενο βήμα.
Η εναλλαγή πρέπει να πραγματοποιείται με τέτοιο τρόπο ώστε Φ0 (ροή διέγερσης ρότορα) να διατηρείται σταθερή σε σχέση με τη ροή του οπλισμού. Όταν μια τέτοια διέγερση και η ροή του οπλισμού αλληλεπιδρούν, σχηματίζεται μια ροπή M, η οποία τείνει να περιστρέφει τον ρότορα και παράλληλα να διασφαλίζει τη σύμπτωση της διέγερσης και της ροής του οπλισμού. Ωστόσο, κατά την περιστροφή του ρότορα, οι διάφορες περιελίξεις εναλλάσσονται υπό την επίδραση του αισθητήρα θέσης του ρότορα, με αποτέλεσμα η ροή του οπλισμού να στρέφεται προς το επόμενο βήμα.
Σε μια τέτοια κατάσταση, το διάνυσμα που προκύπτει μετατοπίζεται και γίνεται ακίνητο σε σχέση με τη ροή του ρότορα, η οποία, με τη σειρά της, δημιουργεί την απαραίτητη ροπή στον άξονα του κινητήρα.
Διαχείριση κινητήρα
Ο ελεγκτής ενός ηλεκτροκινητήρα συνεχούς ρεύματος χωρίς ψήκτρες ρυθμίζει τη ροπή που επενεργεί στον ρότορα αλλάζοντας την τιμή της διαμόρφωσης πλάτους παλμού. Η εναλλαγή είναι ελεγχόμενη και πραγματοποιούνται ηλεκτρονικά, σε αντίθεση με έναν συμβατικό κινητήρα συνεχούς ρεύματος με βούρτσα. Επίσης κοινά είναι τα συστήματα ελέγχου που εφαρμόζουν τη διαμόρφωση πλάτους παλμού και αλγόριθμους ρύθμισης εύρους παλμού για τη ροή εργασίας.
 Οι διανυσματικά ελεγχόμενοι κινητήρες παρέχουν το ευρύτερο γνωστό εύρος αυτοελέγχου ταχύτητας. Η ρύθμιση αυτής της ταχύτητας, καθώς και η διατήρηση της σύνδεσης ροής στο απαιτούμενο επίπεδο, οφείλεται στον μετατροπέα συχνότητας.
Οι διανυσματικά ελεγχόμενοι κινητήρες παρέχουν το ευρύτερο γνωστό εύρος αυτοελέγχου ταχύτητας. Η ρύθμιση αυτής της ταχύτητας, καθώς και η διατήρηση της σύνδεσης ροής στο απαιτούμενο επίπεδο, οφείλεται στον μετατροπέα συχνότητας.
Ένα χαρακτηριστικό της ρύθμισης της ηλεκτρικής κίνησης με βάση τον έλεγχο διανυσμάτων είναι η παρουσία ελεγχόμενων συντεταγμένων. Βρίσκονται σε σταθερό σύστημα και μετατρέπεται σε περιστρεφόμενο, επισημαίνοντας μια σταθερή τιμή ανάλογη με τις ελεγχόμενες παραμέτρους του διανύσματος, λόγω της οποίας σχηματίζεται μια ενέργεια ελέγχου και στη συνέχεια μια αντίστροφη μετάβαση.
Παρά όλα τα πλεονεκτήματα ενός τέτοιου συστήματος, συνοδεύεται επίσης από ένα μειονέκτημα με τη μορφή της πολυπλοκότητας του ελέγχου της συσκευής για τον έλεγχο της ταχύτητας σε ένα ευρύ φάσμα.
Πλεονεκτήματα και μειονεκτήματα
Σήμερα, σε πολλές βιομηχανίες, αυτός ο τύπος κινητήρα έχει μεγάλη ζήτηση, επειδή ο κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες συνδυάζει σχεδόν όλες τις καλύτερες ιδιότητες των κινητήρων χωρίς επαφή και άλλων τύπων.
Τα αναμφισβήτητα πλεονεκτήματα του κινητήρα χωρίς ψήκτρες είναι:

Παρά τα σημαντικά θετικά, κινητήρας συνεχούς ρεύματος χωρίς ψήκτρεςέχει επίσης μερικά μειονεκτήματα:

Με βάση τα παραπάνω και την υπανάπτυξη των σύγχρονων ηλεκτρονικών στην περιοχή, πολλοί εξακολουθούν να θεωρούν σκόπιμη τη χρήση ενός συμβατικού ασύγχρονου κινητήρα με μετατροπέα συχνότητας.
Τριφασικός κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες
Αυτός ο τύπος κινητήρα έχει εξαιρετική απόδοση, ειδικά κατά την εκτέλεση ελέγχου μέσω αισθητήρων θέσης. Εάν η στιγμή αντίστασης ποικίλλει ή δεν είναι καθόλου γνωστή, και επίσης εάν είναι απαραίτητο να επιτευχθεί υψηλότερη ροπή εκκίνησηςχρησιμοποιείται έλεγχος αισθητήρα. Εάν ο αισθητήρας δεν χρησιμοποιείται (συνήθως σε ανεμιστήρες), το χειριστήριο εξαλείφει την ανάγκη για ενσύρματη επικοινωνία.
Χαρακτηριστικά ελέγχου ενός τριφασικού κινητήρα χωρίς ψήκτρες χωρίς αισθητήρα θέσης:

Λειτουργίες ελέγχου τριφασικός κινητήρας χωρίς ψήκτρεςμε κωδικοποιητή θέσης χρησιμοποιώντας το παράδειγμα ενός αισθητήρα εφέ Hall:

συμπέρασμα
Ένας κινητήρας συνεχούς ρεύματος χωρίς ψήκτρες έχει πολλά πλεονεκτήματα και θα είναι μια αξιόλογη επιλογή για χρήση τόσο από ειδικό όσο και από απλό λαϊκό.