Χιλιάδες άνθρωποι σε όλο τον κόσμο κάνουν επισκευές καθημερινά. Όταν το εκτελείτε, όλοι αρχίζουν να σκέφτονται τις λεπτές αποχρώσεις που συνοδεύουν την ανακαίνιση: σε ποιο χρωματικό σχέδιο να επιλέξετε ταπετσαρία, πώς να επιλέξετε κουρτίνες που να ταιριάζουν με το χρώμα της ταπετσαρίας, πώς να τακτοποιήσετε σωστά τα έπιπλα για να επιτύχετε ένα ενιαίο στυλ του δωματίου. Αλλά σπάνια σκέφτεται κανείς το πιο σημαντικό πράγμα, και αυτό το κύριο πράγμα είναι η αντικατάσταση της ηλεκτρικής καλωδίωσης στο διαμέρισμα. Εξάλλου, αν συμβεί κάτι με την παλιά καλωδίωση, το διαμέρισμα θα χάσει όλη την ελκυστικότητά του και θα γίνει εντελώς ακατάλληλο για διαμονή.
Οποιοσδήποτε ηλεκτρολόγος ξέρει πώς να αντικαταστήσει την καλωδίωση σε ένα διαμέρισμα, αλλά οποιοσδήποτε απλός πολίτης μπορεί να το κάνει αυτό, ωστόσο, όταν εκτελεί αυτό το είδος εργασίας, θα πρέπει να επιλέξει υλικά υψηλής ποιότητας για να αποκτήσει ένα ασφαλές ηλεκτρικό δίκτυο στο δωμάτιο.
Η πρώτη ενέργεια που πρέπει να γίνει είναι σχέδιο μελλοντικής καλωδίωσης. Σε αυτό το στάδιο, πρέπει να προσδιορίσετε ακριβώς πού θα τοποθετηθούν τα καλώδια. Επίσης, σε αυτό το στάδιο, μπορείτε να κάνετε οποιεσδήποτε προσαρμογές στο υπάρχον δίκτυο, το οποίο θα σας επιτρέψει να τακτοποιήσετε τους λαμπτήρες και τους λαμπτήρες όσο το δυνατόν πιο άνετα, σύμφωνα με τις ανάγκες των ιδιοκτητών.
12.12.2019
Συσκευές στενής βιομηχανίας της υποβιομηχανίας πλεξίματος και η συντήρησή τους
Για τον προσδιορισμό της ελαστικότητας των καλτσών, χρησιμοποιείται μια συσκευή, το διάγραμμα της οποίας φαίνεται στο Σχ. 1.
Ο σχεδιασμός της συσκευής βασίζεται στην αρχή της αυτόματης εξισορρόπησης του βραχίονα στροφέα από τις ελαστικές δυνάμεις του προϊόντος που δοκιμάζεται, ενεργώντας με σταθερή ταχύτητα.
Η δοκός βάρους είναι μια στρογγυλή χαλύβδινη ράβδος 6 με ίσο βραχίονα, που έχει άξονα περιστροφής 7. Στο δεξί της άκρο, τα πόδια ή η ολισθαίνουσα μορφή του ίχνους 9 συνδέονται χρησιμοποιώντας μια κλειδαριά μπαγιονέτ, στην οποία τοποθετείται το προϊόν. Μια ανάρτηση για τα φορτία 4 είναι αρθρωμένη στον αριστερό ώμο και το άκρο της τελειώνει με ένα βέλος 5, που δείχνει την κατάσταση ισορροπίας του βραχίονα στροφέα. Πριν από τη δοκιμή του προϊόντος, ο βραχίονας παλινδρόμησης φέρεται σε ισορροπία χρησιμοποιώντας ένα κινητό βάρος 8.

Ρύζι. 1. Διάγραμμα συσκευής για τη μέτρηση της αντοχής σε εφελκυσμό της καλτσοποιίας: 1 - οδηγός, 2 - αριστερός χάρακας, 3 - ολισθητήρας, 4 - κρεμάστρα για φορτία. 5, 10 - βέλη, 6 - ράβδος, 7 - άξονας περιστροφής, 8 - βάρος, 9 - σχήμα ίχνους, 11 - μοχλός τεντώματος,
12— φορείο, 13 — μολύβδινη βίδα, 14 — δεξιός χάρακας. 15, 16 - ελικοειδή γρανάζια, 17 - ατέρμονα γρανάζια, 18 - ζεύξη, 19 - ηλεκτροκινητήρας
Για τη μετακίνηση του φορείου 12 με τον μοχλό τάνυσης 11, χρησιμοποιείται ένας κοχλίας 13, στο κάτω άκρο του οποίου είναι στερεωμένος ένας ελικοειδής τροχός 15. μέσω αυτού η περιστροφική κίνηση μεταδίδεται στον οδηγό κοχλία. Η αλλαγή της φοράς περιστροφής της βίδας εξαρτάται από την αλλαγή στην περιστροφή του 19, ο οποίος συνδέεται με το γρανάζι ατέρμονα 17 μέσω ενός συνδέσμου 18. Ένας ελικοειδής τροχός 16 είναι τοποθετημένος στον άξονα του γραναζιού, ο οποίος μεταδίδει απευθείας κίνηση στο γρανάζι 15 .
11.12.2019
Στους πνευματικούς ενεργοποιητές, η δύναμη ρύθμισης δημιουργείται από τη δράση του πεπιεσμένου αέρα σε μια μεμβράνη ή έμβολο. Αντίστοιχα, υπάρχουν μηχανισμοί μεμβράνης, εμβόλου και φυσούνας. Έχουν σχεδιαστεί για να εγκαθιστούν και να μετακινούν τη βαλβίδα ελέγχου σύμφωνα με το πνευματικό σήμα εντολής. Η πλήρης διαδρομή λειτουργίας του στοιχείου εξόδου των μηχανισμών πραγματοποιείται όταν το σήμα εντολής αλλάζει από 0,02 MPa (0,2 kg/cm 2) σε 0,1 MPa (1 kg/cm 2). Η μέγιστη πίεση πεπιεσμένου αέρα στην κοιλότητα εργασίας είναι 0,25 MPa (2,5 kg/cm2).
Σε μηχανισμούς γραμμικού διαφράγματος, η ράβδος εκτελεί παλινδρομική κίνηση. Ανάλογα με την κατεύθυνση κίνησης του στοιχείου εξόδου, χωρίζονται σε μηχανισμούς άμεσης δράσης (με αυξανόμενη πίεση μεμβράνης) και αντίστροφης δράσης.

Ρύζι. 1. Σχεδιασμός ενεργοποιητή μεμβράνης άμεσης δράσης: 1, 3 - καλύμματα, 2 - μεμβράνη, 4 - δίσκος στήριξης, 5 - βραχίονας, 6 - ελατήριο, 7 - ράβδος, 8 - δακτύλιος στήριξης, 9 - παξιμάδι ρύθμισης, 10 - συνδετικό παξιμάδι
Τα κύρια δομικά στοιχεία του ενεργοποιητή μεμβράνης είναι ένας πνευματικός θάλαμος μεμβράνης με βραχίονα και κινούμενο τμήμα.
Ο πνευματικός θάλαμος μεμβράνης του μηχανισμού άμεσης δράσης (Εικ. 1) αποτελείται από καλύμματα 3 και 1 και μεμβράνη 2. Το κάλυμμα 3 και η μεμβράνη 2 σχηματίζουν μια σφραγισμένη κοιλότητα εργασίας, το κάλυμμα 1 είναι προσαρτημένο στο στήριγμα 5. Το κινούμενο μέρος περιλαμβάνει δίσκο στήριξης 4 , στην οποία είναι προσαρτημένη η μεμβράνη 2, μια ράβδος 7 με ένα συνδετικό παξιμάδι 10 και ένα ελατήριο 6. Το ένα άκρο του ελατηρίου στηρίζεται στον δίσκο στήριξης 4 και το άλλο μέσω του δακτυλίου στήριξης 8 στο παξιμάδι ρύθμισης 9, το οποίο εξυπηρετεί για να αλλάξει η αρχική τάση του ελατηρίου και η φορά κίνησης της ράβδου.
08.12.2019
Σήμερα υπάρχουν διάφοροι τύποι λαμπτήρων για. Κάθε ένα από αυτά έχει τα δικά του πλεονεκτήματα και μειονεκτήματα. Ας εξετάσουμε τους τύπους λαμπτήρων που χρησιμοποιούνται συχνότερα για φωτισμό σε κτίριο κατοικιών ή διαμέρισμα.

Ο πρώτος τύπος λαμπτήρων είναι λαμπτήρα πυρακτώσεως. Αυτός είναι ο φθηνότερος τύπος λαμπτήρα. Τα πλεονεκτήματα τέτοιων λαμπτήρων περιλαμβάνουν το κόστος και την απλότητα της συσκευής. Το φως από τέτοιους λαμπτήρες είναι το καλύτερο για τα μάτια. Τα μειονεκτήματα τέτοιων λαμπτήρων περιλαμβάνουν μικρή διάρκεια ζωής και μεγάλη ποσότητα ηλεκτρικής ενέργειας που καταναλώνεται.
Ο επόμενος τύπος λαμπτήρων είναι Λαμπτήρες εξοικονόμησης ενέργειας. Τέτοιοι λαμπτήρες μπορούν να βρεθούν για απολύτως κάθε τύπο βάσης. Είναι ένας επιμήκης σωλήνας που περιέχει ένα ειδικό αέριο. Είναι το αέριο που δημιουργεί την ορατή λάμψη. Για τους σύγχρονους λαμπτήρες εξοικονόμησης ενέργειας, ο σωλήνας μπορεί να έχει μεγάλη ποικιλία σχημάτων. Τα πλεονεκτήματα τέτοιων λαμπτήρων: χαμηλή κατανάλωση ενέργειας σε σύγκριση με τους λαμπτήρες πυρακτώσεως, λάμψη φωτός ημέρας, μεγάλη ποικιλία βάσεων. Τα μειονεκτήματα τέτοιων λαμπτήρων περιλαμβάνουν την πολυπλοκότητα του σχεδιασμού και το τρεμόπαιγμα. Το τρεμόπαιγμα συνήθως δεν γίνεται αντιληπτό, αλλά τα μάτια θα κουραστούν από το φως.
28.11.2019
Συναρμολόγηση καλωδίων- ένας τύπος μονάδας στερέωσης. Το συγκρότημα καλωδίων αποτελείται από πολλά τοπικά, τερματισμένα και στις δύο πλευρές στο κατάστημα ηλεκτρικών εγκαταστάσεων και δεμένα σε μια δέσμη. Η εγκατάσταση της διαδρομής του καλωδίου πραγματοποιείται τοποθετώντας το συγκρότημα καλωδίων στις συσκευές στερέωσης της διαδρομής καλωδίων (Εικ. 1).
Διαδρομή καλωδίου πλοίου- μια ηλεκτρική γραμμή που τοποθετείται σε ένα πλοίο από καλώδια (δέσμες καλωδίων), συσκευές στερέωσης διαδρομής καλωδίων, συσκευές σφράγισης κ.λπ. (Εικ. 2).
Σε ένα πλοίο, η διαδρομή του καλωδίου βρίσκεται σε δυσπρόσιτα σημεία (κατά μήκος των πλευρών, της οροφής και των διαφραγμάτων). έχουν έως και έξι στροφές σε τρία επίπεδα (Εικ. 3). Σε μεγάλα πλοία, το μεγαλύτερο μήκος καλωδίου φτάνει τα 300 m και η μέγιστη διατομή της διαδρομής του καλωδίου είναι 780 cm2. Σε μεμονωμένα πλοία συνολικού μήκους καλωδίου άνω των 400 km, προβλέπονται διάδρομοι καλωδίων για την υποδοχή της διαδρομής του καλωδίου.
Οι διαδρομές καλωδίων και τα καλώδια που διέρχονται από αυτά χωρίζονται σε τοπικά και κύρια, ανάλογα με την απουσία (παρουσία) συσκευών συμπίεσης.
Οι διαδρομές καλωδίων κορμού χωρίζονται σε διαδρομές με κουτιά τερματισμού και τροφοδοσίας, ανάλογα με τον τύπο εφαρμογής του κουτιού καλωδίων. Αυτό έχει νόημα για την επιλογή τεχνολογικού εξοπλισμού και τεχνολογίας εγκατάστασης καλωδιακής διαδρομής.
21.11.2019
Στον τομέα της ανάπτυξης και παραγωγής συσκευών οργάνων και ελέγχου, η αμερικανική εταιρεία Fluke Corporation κατέχει μία από τις κορυφαίες θέσεις παγκοσμίως. Ιδρύθηκε το 1948 και έκτοτε συνεχώς αναπτύσσει και βελτιώνει τεχνολογίες στον τομέα της διάγνωσης, των δοκιμών και της ανάλυσης.
Καινοτομίες από έναν Αμερικανό προγραμματιστή
Ο επαγγελματικός εξοπλισμός μέτρησης από μια πολυεθνική εταιρεία χρησιμοποιείται για τη συντήρηση συστημάτων θέρμανσης, κλιματισμού και εξαερισμού, ψυκτικών μονάδων, ελέγχου ποιότητας αέρα και βαθμονόμησης ηλεκτρικών παραμέτρων. Το κατάστημα της μάρκας Fluke προσφέρει την αγορά πιστοποιημένου εξοπλισμού από Αμερικανό προγραμματιστή. Η πλήρης σειρά περιλαμβάνει:- Θερμικές συσκευές απεικόνισης, ελεγκτές αντίστασης μόνωσης.
- ψηφιακά πολύμετρα?
- αναλυτές ποιότητας ηλεκτρικής ενέργειας.
- αποστασιομετρητές, μετρητές κραδασμών, παλμογράφοι.
- βαθμονομητές θερμοκρασίας, πίεσης και πολυλειτουργικές συσκευές.
- οπτικά πυρόμετρα και θερμόμετρα.
07.11.2019
Ένας μετρητής στάθμης χρησιμοποιείται για τον προσδιορισμό της στάθμης διαφορετικών τύπων υγρών σε ανοιχτές και κλειστές εγκαταστάσεις αποθήκευσης και δοχεία. Χρησιμοποιείται για τη μέτρηση του επιπέδου μιας ουσίας ή της απόστασης από αυτήν.
Για τη μέτρηση των επιπέδων υγρών, χρησιμοποιούνται αισθητήρες που διαφέρουν ως προς τον τύπο: μετρητής στάθμης ραντάρ, μικροκυμάτων (ή κυματοδηγός), ακτινοβολία, ηλεκτρικοί (ή χωρητικός), μηχανικοί, υδροστατικοί, ακουστικοί.
Αρχές και χαρακτηριστικά λειτουργίας μετρητών στάθμης ραντάρ
Τα τυπικά όργανα δεν μπορούν να προσδιορίσουν το επίπεδο των χημικά επιθετικών υγρών. Μόνο ένας μετρητής στάθμης ραντάρ μπορεί να το μετρήσει, καθώς δεν έρχεται σε επαφή με το υγρό κατά τη λειτουργία. Επιπλέον, οι μετρητές στάθμης ραντάρ είναι πιο ακριβείς σε σύγκριση, για παράδειγμα, με υπερηχητικούς ή χωρητικούς.Όταν η ροπή που αναπτύσσεται από τον κινητήρα είναι ίση με τη ροπή αντίστασης του ενεργοποιητή, η ταχύτητα κίνησης είναι σταθερή.
Ωστόσο, σε πολλές περιπτώσεις ο κινητήρας επιταχύνει ή επιβραδύνει, π.χ. λειτουργεί σε μεταβατική λειτουργία.
ΜεταβατικόςΟ τρόπος λειτουργίας ηλεκτρικής κίνησης είναι ο τρόπος λειτουργίας κατά τη μετάβαση από τη μια σταθερή κατάσταση στην άλλη, όταν αλλάζουν η ταχύτητα, η ροπή και το ρεύμα.
Οι λόγοι για την εμφάνιση μεταβατικών τρόπων λειτουργίας στους ηλεκτροκινητήρες είναι οι αλλαγές στο φορτίο που σχετίζεται με τη διαδικασία παραγωγής ή η επίδραση στην ηλεκτρική κίνηση κατά τον έλεγχό της, δηλ. εκκίνηση, πέδηση, αλλαγή φοράς περιστροφής κ.λπ., καθώς και διακοπή του συστήματος τροφοδοσίας.
Η εξίσωση κίνησης της ηλεκτρικής κίνησης πρέπει να λαμβάνει υπόψη όλες τις ροπές που δρουν σε μεταβατικές καταστάσεις.
Γενικά, η εξίσωση κίνησης της ηλεκτρικής κίνησης μπορεί να γραφτεί ως εξής:
Σε θετική ταχύτητα, η εξίσωση κίνησης της ηλεκτρικής κίνησης έχει τη μορφή
. (2.10)
Η εξίσωση (2.10) δείχνει ότι η ροπή που αναπτύσσεται από τον κινητήρα εξισορροπείται από τη ροπή αντίστασης και τη δυναμική ροπή. Στις εξισώσεις (2.9) και (2.10), θεωρείται ότι η ροπή αδράνειας της μετάδοσης κίνησης είναι σταθερή, κάτι που ισχύει για σημαντικό αριθμό ενεργοποιητών.
Από την ανάλυση της εξίσωσης (2.10) είναι σαφές:
1) στο > , , δηλ. λαμβάνει χώρα επιτάχυνση κίνησης.
2) πότε < , , δηλ. ο κινητήρας επιβραδύνεται (προφανώς, ο κινητήρας επιβραδύνεται ακόμη και αν η ροπή του κινητήρα είναι αρνητική).
3) πότε = , ; σε αυτήν την περίπτωση ο ηλεκτροκινητήρας λειτουργεί σε σταθερή κατάσταση.
Δυναμική στιγμή(η δεξιά πλευρά της εξίσωσης ροπής) εμφανίζεται μόνο κατά τις μεταβατικές λειτουργίες όταν αλλάζει η ταχύτητα κίνησης. Όταν η κίνηση επιταχύνεται, αυτή η ροπή στρέφεται ενάντια στην κίνηση και κατά το φρενάρισμα υποστηρίζει την κίνηση.
2.5. Σταθερή κίνηση και σταθερότητα
σταθερή κίνηση της ηλεκτρικής κίνησης
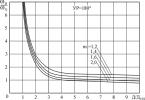
Έχοντας τα μηχανικά χαρακτηριστικά του κινητήρα και του εκτελεστικού σώματος, δεν είναι δύσκολο να προσδιοριστεί η σκοπιμότητα της συνθήκης σταθερής κίνησης. Για να γίνει αυτό, συνδυάζουμε αυτά τα χαρακτηριστικά στο ίδιο τεταρτημόριο. Το γεγονός της τομής αυτών των χαρακτηριστικών υποδηλώνει τη δυνατότητα κοινής λειτουργίας του κινητήρα και του εκτελεστικού σώματος και το σημείο τομής τους είναι το σημείο σταθερής κίνησης, αφού σε αυτό το σημείο και .
Το σχήμα 2.4 δείχνει τα μηχανικά χαρακτηριστικά του ανεμιστήρα (καμπύλη 1) και του κινητήρα ανεξάρτητης διέγερσης (ευθεία γραμμή 2). Το σημείο Α είναι το σημείο σταθερής κίνησης και οι συντεταγμένες του είναι οι συντεταγμένες σταθερής κίνησης του ανεμιστήρα.
Ρύζι. 2.4. Προσδιορισμός παραμέτρων σταθερής κίνησης
Για την πλήρη ανάλυση της κίνησης σε σταθερή κατάσταση, είναι απαραίτητο να προσδιοριστεί εάν η κίνηση είναι σταθερή. Βιώσιμοςθα υπάρχει μια τέτοια σταθερή κίνηση που, αφού αφαιρεθεί από τη σταθερή κατάσταση λόγω κάποιας εξωτερικής διαταραχής, επιστρέφει σε αυτή τη λειτουργία μετά την εξαφάνιση της διαταραχής.
Για τον προσδιορισμό της σταθερότητας κίνησης, είναι βολικό να χρησιμοποιηθούν μηχανικά χαρακτηριστικά.
Απαραίτητη και επαρκής κατάσταση σταθερότηταςΗ σταθερή κίνηση είναι το αντίθετο πρόσημο της αύξησης της ταχύτητας και της προκύπτουσας δυναμικής ροπής, δηλ.
Ας αξιολογήσουμε, ως παράδειγμα (Εικ. 2.5), τη σταθερότητα της κίνησης μιας ηλεκτρικής κίνησης. Η κίνηση σε σταθερή κατάσταση είναι δυνατή με δύο ταχύτητες: στο σημείο 1 και στο σημείο 2, στο οποίο . Ας προσδιορίσουμε αν η κίνηση είναι σταθερή και στα δύο σημεία.
Ρύζι. 2.5. Προσδιορισμός της σταθερότητας μηχανικής κίνησης
Τελεία 1. Ας υποθέσουμε ότι υπό την επίδραση μιας βραχυπρόθεσμης διαταραχής η ταχύτητα αυξήθηκε στην τιμή , μετά την οποία η διαταραχή εξαφανίστηκε. Σύμφωνα με τα μηχανικά χαρακτηριστικά του AD, η ταχύτητα θα αντιστοιχεί στη ροπή.
Ως αποτέλεσμα αυτού, η δυναμική ροπή = θα γίνει αρνητική και ο κινητήρας θα αρχίσει να φρενάρει σε μια ταχύτητα με την οποία .
Εάν η διαταραχή προκαλεί μείωση της ταχύτητας στην τιμή , τότε
η αρτηριακή πίεση θα αυξηθεί στην τιμή, δυναμική ροπή
= θα γίνει θετικό και η ταχύτητα θα αυξηθεί στην προηγούμενη τιμή της. Έτσι, η κίνηση στο σημείο 1 με ταχύτητα είναι σταθερή.
Κατά τη διεξαγωγή παρόμοιας ανάλυσης, μπορεί να συναχθεί το συμπέρασμα ότι η κίνηση της ηλεκτρικής κίνησης είναι ασταθής μέσα σημείο 2 με ταχύτητα.
Σταθερότητα ή αστάθειαη κίνηση μπορεί να προσδιοριστεί αναλυτικά χρησιμοποιώντας την έννοια της ακαμψίας των μηχανικών χαρακτηριστικών του κινητήρα και του εκτελεστικού σώματος: . Συνθήκη σταθερότητας:
ή . (2.12)
Για το υπό εξέταση παράδειγμα, επομένως, η σταθερότητα καθορίζεται από το πρόσημο της ακαμψίας του χαρακτηριστικού IM: για σημεία 1 κίνηση είναι σταθερή, αλλά για σημεία 2 και η κίνηση είναι ασταθής.
Σημειώστε ότι, σύμφωνα με την εξίσωση (2.10), σε μια ορισμένη ακαμψία, η σταθερή λειτουργία της ηλεκτρικής κίνησης είναι επίσης δυνατή με θετική ακαμψία των μηχανικών χαρακτηριστικών του IM, ιδίως στο λεγόμενο μη λειτουργικό τμήμα του Χαρακτηριστικό IM.
2.6. Ασταθής κίνηση της ηλεκτροκίνησης
σε σταθερή δυναμική ροπή
Ασταθήςη μηχανική κίνηση της ηλεκτρικής κίνησης συμβαίνει σε όλες τις περιπτώσεις όταν η ροπή του κινητήρα διαφέρει από τη ροπή του φορτίου, δηλ. Οταν .
Η εξέταση της ασταθούς κίνησης μιας ηλεκτρικής κίνησης έχει ως κύριο στόχο τη λήψη των χρονικών εξαρτήσεων των μηχανικών συντεταγμένων εξόδου της ηλεκτρικής κίνησης - ροπή, ταχύτητα και θέση του άξονα του κινητήρα. Επιπλέον, είναι συχνά απαραίτητος ο προσδιορισμός του χρόνου ασταθούς κίνησης (παροδική διαδικασία) ενός ηλεκτροκινητήρα. Σημειώστε ότι οι νόμοι για την αλλαγή των ροπών και των φορτίων του κινητήρα πρέπει να είναι προκαθορισμένοι.
Ας εξετάσουμε την ασταθή κίνηση με σταθερή δυναμική ροπή κατά την εκκίνηση ενός ηλεκτροκινητήρα. Υποτίθεται ότι κατά την εκκίνηση του ηλεκτροκινητήρα και , αλλά .
Επιλύοντας την εξίσωση της μηχανικής κίνησης της ηλεκτρικής κίνησης, προκύπτει η ακόλουθη εξάρτηση:
; (2.13)
Η εξίσωση (2.14) προέκυψε λαμβάνοντας υπόψη τις ισότητες και .
Υποθέτοντας και στην εξίσωση (2.13), βρίσκουμε τον χρόνο μεταβολής της ταχύτητας από σε
. (2.15)
Τα χαρακτηριστικά , , παρουσιάζονται στο Σχήμα 2.6.
Ρύζι. 2.6. Χαρακτηριστικά , ,
κατά την εκκίνηση του ηλεκτροκινητήρα
Στις εξισώσεις (2.13), (2.14) και (2.15), η ροπή θεωρείται ότι είναι ίση με τη μέση ροπή κατά την εκκίνηση του κινητήρα, επομένως οι αναλυτικές σχέσεις που λαμβάνονται παραπάνω χρησιμοποιούνται μόνο όταν εκτελούνται διάφοροι κατά προσέγγιση υπολογισμοί σε μια ηλεκτρική κίνηση. Ειδικότερα, η ασταθής κίνηση μπορεί να ληφθεί υπόψη κατά το φρενάρισμα και την οπισθοπορεία της ηλεκτροκίνησης ή κατά τη μετάβαση από το ένα χαρακτηριστικό στο άλλο.
2.7. Ασταθής κίνηση της ηλεκτροκίνησης
με γραμμική εξάρτηση των ροπών του κινητήρα
και εκτελεστικό όργανο για την ταχύτητα
Ο εν λόγω τύπος κίνησης είναι πολύ κοινός.
Το σχήμα 2.7 δείχνει τα μηχανικά χαρακτηριστικά των EM και IO κατά την εκκίνηση του ηλεκτροκινητήρα.
Ρύζι. 2.7. Μηχανικά χαρακτηριστικά EM και IO κατά την εκκίνηση ενός ηλεκτροκινητήρα
Τα μηχανικά χαρακτηριστικά των ED και IO μπορούν να εκφραστούν αναλυτικά με τις ακόλουθες εξισώσεις:
Στις εξισώσεις (2.16) και (2.17) και είναι οι συντελεστές ακαμψίας των μηχανικών χαρακτηριστικών των ΕΔ και ΙΟ.
Αντικαθιστώντας τις παραπάνω εξισώσεις στην εξίσωση της μηχανικής κίνησης του ηλεκτροκινητήρα, λαμβάνουμε τις παρακάτω εξισώσεις για τις εξαρτήσεις , , .
όπου είναι η ηλεκτρομηχανική χρονική σταθερά σε δευτερόλεπτα, λαμβάνοντας υπόψη τη μηχανική αδράνεια του ηλεκτροκινητήρα και επηρεάζοντας το χρόνο εκκίνησης του ηλεκτροκινητήρα.
Οι παραστάσεις (2.18)–(2.20) που προκύπτουν μπορούν να χρησιμοποιηθούν για την ανάλυση μεταβατικών διεργασιών διαφόρων τύπων, αλλά σε κάθε συγκεκριμένη περίπτωση πρέπει να προσδιορίζεται η ηλεκτρομηχανική χρονική σταθερά, καθώς και οι αρχικές και τελικές τιμές των συντεταγμένων, , , . Στην ειδική περίπτωση, όταν και , αυτές οι ποσότητες μπορούν να προσδιοριστούν από τους τύπους:
; (2.21)
; , (2.22)
όπου είναι ο χρόνος κατά τον οποίο η ηλεκτρική κίνηση ξεκινά με ταχύτητα σε . Επειτα . Δεδομένου ότι η ροπή του κινητήρα αλλάζει συνήθως κατά την εκκίνηση, στην πράξη ο χρόνος εκκίνησης σε δευτερόλεπτα καθορίζεται από την έκφραση , ή από την ακόλουθη έκφραση: .
Οι εξαρτήσεις φαίνονται στο Σχήμα 2.8.
Ρύζι. 2.8. Εξαρτήσεις
κατά την εκκίνηση του ηλεκτροκινητήρα
2.8. Αστάθεια κίνηση της ηλεκτροκίνησης
με αυθαίρετη εξάρτηση της δυναμικής ροπής
από την ταχύτητα
Κατά τον καθορισμό ; ; για σύνθετες εξαρτήσεις
ροπή κινητήρα και ροπή αντίστασης σε σχέση με την ταχύτητα, χρησιμοποιήστε αριθμητική Η μέθοδος του Euler.Η ουσία του είναι ότι στην εξίσωση κίνησης της ηλεκτρικής κίνησης, τα διαφορικά των μεταβλητών αντικαθίστανται από μικρές αυξήσεις
Και .
Ας δείξουμε τη χρήση της μεθόδου του Euler χρησιμοποιώντας το παράδειγμα εκκίνησης μιας φυγόκεντρης αντλίας με έναν ασύγχρονο ηλεκτροκινητήρα. Μηχανικά χαρακτηριστικά ΕΔ
και η φυγοκεντρική αντλία φαίνονται στο Σχ. 2.9.
Ρύζι. 2.9. Μηχανικά χαρακτηριστικά ED και IO
1. Ο άξονας της ταχύτητας χωρίζεται σε μικρά και ίσα τμήματα ∆ ω.
2. Σε κάθε τμήμα προσδιορίζονται οι μέσες ροπές κ.λπ., κ.λπ.
3. Στη συνέχεια συντάσσεται ο πίνακας 2.1 και προσδιορίζονται οι εξαρτήσεις από αυτόν.
Πίνακας 2.1
| ω 1 =∆ω 1 | t 1 =∆t 1 | ||
| ω 2 =ω 1 +∆ω 2 | t 2 = t 1 +∆t 2 | ||
| ω 3 =ω 2 +∆ω 3 | t 3 =t 2 +∆t 3 | ||
| … | … | … | … |
| ων | Μ d n | tn |
; κ.λπ. – γωνιακές ταχύτητες του ED και του IR. .
Τα κιβώτια ταχυτήτων ή τα χειροκίνητα CVT μπορεί να είναι ογκώδη (σύνθετα). Η χρήση τους μειώνει την αξιοπιστία και την απόδοση της ηλεκτροκίνησης. Επομένως, στην πράξη χρησιμοποιείται κυρίως η μέθοδος ηλεκτρικού ελέγχου, επηρεάζοντας τις παραμέτρους του ηλεκτροκινητήρα ή της πηγής ισχύος. Αυτή η μέθοδος έχει τους καλύτερους τεχνικούς και οικονομικούς δείκτες. Ωστόσο, σε ορισμένες μηχανές επεξεργασίας μετάλλων χρησιμοποιείται μια μικτή μέθοδος ελέγχου.
Θεωρητικάηλεκτρική κίνηση μηχανικές, ηλεκτρικές και μαγνητικές μεταβλητές που χαρακτηρίζουν τη λειτουργία του κινητήρα - ταχύτητα, επιτάχυνση, θέση άξονα, ροπή, ρεύμα, μαγνητική ροή κ.λπ. - καλέστε συχνά συντεταγμένες. Να γιατί έλεγχος της κίνησης του εκτελεστικού οργάνου ηλεκτρικάπραγματοποιείται μέσω κανονισμού συντεταγμένες (μεταβλητές)ηλεκτρικός κινητήρας.
Είναι σημαντικό να σημειωθεί ότι η ρύθμιση των συντεταγμένων της ηλεκτρικής κίνησης πρέπει να πραγματοποιείται για τον έλεγχο τόσο της σταθερής όσο και της ασταθούς κίνησης του εκτελεστικού οργάνου.
Χαρακτηριστικό παράδειγμα ρύθμισης μεταβλητών είναι η ηλεκτρική κίνηση ενός ανελκυστήρα επιβατών.Κατά την εκκίνηση και τη στάση της καμπίνας, για να εξασφαλιστεί η άνεση των επιβατών, η επιτάχυνση και η επιβράδυνση της κίνησής της δεν πρέπει να υπερβαίνει το επιτρεπόμενο επίπεδο. Πριν σταματήσετε, η ταχύτητα καμπίνας πρέπει να μειωθεί, δηλ. πρέπει να ρυθμιστεί. Και τέλος, η καμπίνα πρέπει να σταματήσει στον απαιτούμενο όροφο με δεδομένη ακρίβεια, δηλ. είναι απαραίτητο να διασφαλιστεί η καθορισμένη θέση (τοποθέτηση) του θαλάμου του ανελκυστήρα.
Χρησιμοποιώντας το εξεταζόμενο παράδειγμα, σημειώνουμε το σημαντικό γεγονός ότι συχνά η ηλεκτρική κίνηση πρέπει να παρέχει τον έλεγχο πολλών συντεταγμένων ταυτόχρονα: ταχύτητα, επιτάχυνση και θέση του εκτελεστικού οργάνου.
Κατά την κατασκευή χαρτιού, υφασμάτων, προϊόντων καλωδίων, διαφόρων μεμβρανών και μετάλλων κύλισης, είναι απαραίτητο να εξασφαλιστεί μια ορισμένη τάση αυτών των υλικών, η οποία πραγματοποιείται επίσης με χρήση ED. Πολλές άλλες μηχανές και μηχανισμοί εργασίας απαιτούν επίσης ρύθμιση συντεταγμένων: γερανοί, μηχανές επεξεργασίας μετάλλων, μεταφορείς, μονάδες άντλησης, ρομπότ και χειριστές κ.λπ.
Το μηχανικό μέρος της ηλεκτρικής κίνησης είναι ένα σύστημα στερεών σωμάτων, η κίνηση των οποίων καθορίζεται από μηχανικές συνδέσεις μεταξύ των σωμάτων. Εάν προσδιορίζονται οι σχέσεις μεταξύ των ταχυτήτων των επιμέρους στοιχείων, τότε η εξίσωση κίνησης της ηλεκτρικής κίνησης έχει διαφορική μορφή. Η πιο γενική μορφή γραφής των εξισώσεων κίνησης είναι οι εξισώσεις κίνησης σε γενικευμένες συντεταγμένες (εξισώσεις Lagrange):
Εβ– το απόθεμα κινητικής ενέργειας του συστήματος, εκφρασμένο σε γενικευμένες συντεταγμένες q iκαι γενικευμένες ταχύτητες?
Qi– γενικευμένη δύναμη που καθορίζεται από το άθροισμα του έργου δ A iόλες οι ενεργούσες δυνάμεις σε πιθανή μετατόπιση.
Η εξίσωση Lagrange μπορεί να αναπαρασταθεί με μια άλλη μορφή:
![]() (2.20)
(2.20)
Εδώ μεγάλο– Συνάρτηση Lagrange, η οποία είναι η διαφορά μεταξύ της κινητικής και της δυνητικής ενέργειας του συστήματος:
μεγάλο= Εβ – W n.
Ο αριθμός των εξισώσεων είναι ίσος με τον αριθμό των βαθμών ελευθερίας του συστήματος και καθορίζεται από τον αριθμό των μεταβλητών - γενικευμένων συντεταγμένων που καθορίζουν τη θέση του συστήματος.
Ας γράψουμε τις εξισώσεις Lagrange για το ελαστικό σύστημα (Εικ. 2.9).
Ρύζι. 2.9. Διάγραμμα σχεδίασης μηχανικού τμήματος δύο μαζών.
Η συνάρτηση Lagrange σε αυτή την περίπτωση έχει τη μορφή
Για να προσδιοριστεί η γενικευμένη δύναμη, είναι απαραίτητο να υπολογιστεί το στοιχειώδες έργο όλων των ροπών που μειώνονται στην πρώτη μάζα σε μια πιθανή μετατόπιση:
![]()
Επομένως, αφού η γενικευμένη δύναμη καθορίζεται από το άθροισμα των στοιχειωδών έργων δ ΕΝΑ 1 στην περιοχή δφ 1 , τότε για να προσδιορίσουμε την τιμή παίρνουμε:
Ομοίως, για ορισμό έχουμε:
Αντικαθιστώντας την έκφραση για τη συνάρτηση Lagrange σε (2.20), λαμβάνουμε:

Έχοντας ορίσει ![]() , παίρνουμε:
, παίρνουμε:
 (2.21)
(2.21)
Ας υποθέσουμε ότι η μηχανική σύνδεση μεταξύ της πρώτης και της δεύτερης μάζας είναι απολύτως άκαμπτη, δηλ. (Εικ. 2.10).
Ρύζι. 2.10. Άκαμπτο μηχανικό σύστημα διπλής μάζας.
Τότε η δεύτερη εξίσωση του συστήματος θα πάρει τη μορφή:
![]()
Αντικαθιστώντας το στην πρώτη εξίσωση του συστήματος, παίρνουμε:
![]()
![]() (2.22)
(2.22)
Αυτή η εξίσωση ονομάζεται μερικές φορές η βασική εξίσωση κίνησης για μια ηλεκτρική κίνηση. Χρησιμοποιώντας το, μπορείτε να χρησιμοποιήσετε τη γνωστή ηλεκτρομαγνητική ροπή του κινητήρα Μ,Χρησιμοποιώντας τη στιγμή αντίστασης και τη συνολική ροπή αδράνειας, υπολογίστε τη μέση τιμή επιτάχυνσης της ηλεκτροκίνησης, υπολογίστε το χρόνο κατά τον οποίο ο κινητήρας θα φτάσει σε μια δεδομένη ταχύτητα και λύστε άλλα προβλήματα εάν η επίδραση των ελαστικών συνδέσεων στο μηχανικό σύστημα είναι σημαντικός.
Ας εξετάσουμε ένα μηχανικό σύστημα με μη γραμμικές κινηματικές συνδέσεις όπως μανιβέλα, ρολό και άλλους παρόμοιους μηχανισμούς (Εικ. 2.11). Η ακτίνα μείωσης σε αυτά είναι μεταβλητή τιμή ανάλογα με τη θέση του μηχανισμού: .

Ρύζι. 2.11. Μηχανικό σύστημα με μη γραμμικές κινηματικές συνδέσεις
Ας φανταστούμε το υπό εξέταση σύστημα ως σύστημα δύο μαζών, η πρώτη μάζα περιστρέφεται με ταχύτητα ω και έχει ροπή αδράνειας και η δεύτερη κινείται με γραμμική ταχύτητα Vκαι αντιπροσωπεύει τη συνολική μάζα Μστοιχεία άκαμπτα και γραμμικά συνδεδεμένα με το σώμα εργασίας του μηχανισμού.
Σχέση μεταξύ γραμμικών ταχυτήτων ω και Vμη γραμμικό και . Για να λάβουμε την εξίσωση κίνησης ενός τέτοιου συστήματος χωρίς να λάβουμε υπόψη τις ελαστικές συνδέσεις, χρησιμοποιούμε την εξίσωση Lagrange (2.19), λαμβάνοντας τη γωνία φ ως γενικευμένη συντεταγμένη. Ας ορίσουμε τη γενικευμένη δύναμη:
Η συνολική ροπή αντίστασης από τις δυνάμεις που ασκούνται στις μάζες που συνδέονται γραμμικά με τον κινητήρα. οδηγείται στον άξονα του κινητήρα.
F C– το αποτέλεσμα όλων των δυνάμεων που ασκούνται στο σώμα εργασίας του μηχανισμού και των στοιχείων που συνδέονται γραμμικά με αυτό·
– πιθανή απειροελάχιστη κίνηση μάζας Μ.
Δεν είναι δύσκολο να το δεις αυτό
Ακτίνα χύτευσης.
Η ροπή στατικού φορτίου του μηχανισμού περιέχει μια συνιστώσα παλμικού φορτίου που μεταβάλλεται σε συνάρτηση με τη γωνία περιστροφής φ:
Απόθεμα κινητικής ενέργειας συστήματος:
Εδώ είναι η συνολική ροπή αδράνειας του συστήματος που μειώνεται στον άξονα του κινητήρα.
Η αριστερή πλευρά της εξίσωσης Lagrange (2.19) μπορεί να γραφτεί ως:
Έτσι, η εξίσωση κίνησης ενός άκαμπτου ανηγμένου συνδέσμου έχει τη μορφή:
![]() (2.23)
(2.23)
Είναι μη γραμμικό με μεταβλητούς συντελεστές.
Για μια άκαμπτη γραμμική μηχανική ζεύξη, η εξίσωση για τον στατικό τρόπο λειτουργίας του ηλεκτροκινητήρα αντιστοιχεί και έχει τη μορφή:
Αν κατά τη μετακίνηση ![]() τότε είτε λαμβάνει χώρα μια δυναμική μεταβατική διαδικασία, είτε μια αναγκαστική κίνηση του συστήματος με περιοδικά μεταβαλλόμενη ταχύτητα.
τότε είτε λαμβάνει χώρα μια δυναμική μεταβατική διαδικασία, είτε μια αναγκαστική κίνηση του συστήματος με περιοδικά μεταβαλλόμενη ταχύτητα.
Σε μηχανικά συστήματα με μη γραμμικές κινηματικές συνδέσεις, δεν υπάρχουν στατικοί τρόποι λειτουργίας. Αν ω=const, σε τέτοια συστήματα υπάρχει μια δυναμική διαδικασία κίνησης σε σταθερή κατάσταση. Οφείλεται στο γεγονός ότι οι μάζες που κινούνται γραμμικά εκτελούν παλινδρομική κίνηση και οι ταχύτητες και οι επιταχύνσεις τους είναι μεταβλητά μεγέθη.
Από ενεργειακή άποψη, γίνεται διάκριση μεταξύ των τρόπων λειτουργίας κινητήρα και πέδησης μιας ηλεκτρικής κίνησης. Η λειτουργία κινητήρα αντιστοιχεί στην άμεση κατεύθυνση μετάδοσης της μηχανικής ενέργειας στο σώμα εργασίας του μηχανισμού. Σε ηλεκτρικούς κινητήρες με ενεργό φορτίο, καθώς και σε μεταβατικές διεργασίες σε ηλεκτρική κίνηση, όταν η κίνηση του μηχανικού συστήματος επιβραδύνεται, η μηχανική ενέργεια μεταφέρεται πίσω από το σώμα εργασίας του μηχανισμού στον κινητήρα.
Σχεδιαστικό διάγραμμα του μηχανικού τμήματος της ηλεκτροκίνησης
Μηχανική ηλεκτροκίνησης
Η ηλεκτρική κίνηση είναι ένα ηλεκτρομηχανικό σύστημα που αποτελείται από ένα ηλεκτρικό και μηχανικό μέρος. Σε αυτό το κεφάλαιο θα εξετάσουμε το μηχανικό μέρος της ηλεκτροκίνησης.
Στη γενική περίπτωση, το μηχανικό μέρος της ηλεκτρικής κίνησης περιλαμβάνει το μηχανικό μέρος του ηλεκτρομηχανικού μετατροπέα (ρότορας ή οπλισμός του ηλεκτροκινητήρα), ο μετατροπέας μηχανικής ενέργειας (μειωτής ή μηχανική μετάδοση) και το εκτελεστικό σώμα της μηχανής εργασίας (IO RM). Δεδομένου ότι το καθήκον μας είναι να θέσουμε σε κίνηση το IO RM, τα χαρακτηριστικά της μηχανής εργασίας και τα χαρακτηριστικά του μηχανικού μέρους του ED είναι θεμελιώδη για την επιλογή και τον υπολογισμό της ηλεκτρικής κίνησης.
Στη γενική περίπτωση, το μηχανικό μέρος μιας ηλεκτρικής κίνησης είναι ένα σύνθετο μηχανικό σύστημα που αποτελείται από πολλούς περιστρεφόμενους και μεταφορικά κινούμενους συνδέσμους με διαφορετικές ταχύτητες, με διαφορετικές μάζες και ροπές αδράνειας, συνδεδεμένες με ελαστικές συνδέσεις (χαμηλής ή πεπερασμένης ακαμψίας). Ταυτόχρονα, συχνά εμφανίζονται κενά στις κινηματικές μεταδόσεις.
Αυτό το πολύπλοκο μηχανικό σύστημα επηρεάζεται από εξωτερικές ροπές και δυνάμεις διαφορετικών κατευθύνσεων και μεγεθών, οι οποίες, με τη σειρά τους, συχνά εξαρτώνται από τον χρόνο, τη γωνία περιστροφής του μηχανισμού, την ταχύτητα κίνησης και άλλους παράγοντες. Δεδομένου ότι αυτό το μηχανικό σύστημα αποτελεί αναπόσπαστο μέρος της ηλεκτρικής κίνησης, είναι απαραίτητο να γνωρίζουμε τα χαρακτηριστικά του και να έχουμε μια μαθηματική περιγραφή επαρκώς ακριβή για μηχανικούς υπολογισμούς. Το μηχανικό μέρος της ηλεκτρικής κίνησης περιγράφεται στη γενική περίπτωση από ένα σύστημα μη γραμμικών μερικών διαφορικών εξισώσεων με μεταβλητούς συντελεστές. Για να περιγράψουμε το μηχανικό μέρος της ηλεκτρικής κίνησης, ο πιο βολικός τρόπος είναι να χρησιμοποιήσουμε εξισώσεις Lagrange του δεύτερου είδους.
Λαμβάνοντας υπόψη ότι η κίνηση ενός μηχανικού συστήματος καθορίζεται από τις μεγαλύτερες μάζες, τις μικρότερες ακαμψίες και τα μεγαλύτερα κενά. πολύ συχνά ένα πολύπλοκο μηχανικό σύστημα μπορεί να αναχθεί σε μοντέλο δύο ή τριών μαζών, το οποίο μπορεί να χρησιμοποιηθεί κατά τον υπολογισμό των συστημάτων ΕΡ. (Πρόκειται για συστήματα με εύκαμπτους άξονες, συστήματα που υπόκεινται σε ξαφνικά δυναμικά φορτία, συστήματα παρακολούθησης ακριβείας).
Στις περισσότερες περιπτώσεις, το μηχανικό μέρος αποτελείται από εξαιρετικά άκαμπτους συνδέσμους με άκαμπτες συνδέσεις και προσπαθούμε να μειώσουμε τα κενά στο μηδέν και, στη συνέχεια, καθίσταται δυνατή η παρουσίαση του σχεδιαγράμματος του μηχανικού μέρους ως ένα σύστημα μονής μάζας τοποθετημένο στο ED άξονα, ενώ παραμελούμε την ελαστικότητα των μηχανικών συνδέσεων και τα κενά στη μεταφορά. Αυτό το μοντέλο χρησιμοποιείται ευρέως για μηχανικούς υπολογισμούς.
Για να αναλυθεί η κίνηση του μηχανικού τμήματος της ηλεκτρικής κίνησης, γίνεται μια μετάβαση από ένα πραγματικό κινηματικό διάγραμμα σε ένα υπολογισμένο, στο οποίο οι μάζες και οι ροπές αδράνειας των κινούμενων στοιχείων της ακαμψίας τους, καθώς και οι δυνάμεις και οι ροπές ενεργώντας σε αυτά τα στοιχεία, αντικαθίστανται από ισοδύναμες τιμές που μειώνονται στην ίδια ταχύτητα (συνήθως συνολικά στην ταχύτητα κίνησης του ED). Η προϋπόθεση για το ληφθέν σχέδιο σχεδίασης να αντιστοιχεί στο πραγματικό μηχανικό μέρος της ηλεκτρικής κίνησης είναι η εκπλήρωση του νόμου της διατήρησης της ενέργειας.
Ρύζι. 2.1. Κινηματικό διάγραμμα της διάταξης ανύψωσης
Η μετάβαση από το πραγματικό σχήμα (Εικ. 2.1) στο υπολογισμένο (Εικ. 2.2) ονομάζεται αναγωγή. Όλες οι παράμετροι του μηχανικού μέρους οδηγούν στον άξονα ED (σε ορισμένες περιπτώσεις στον άξονα του κιβωτίου ταχυτήτων).
Ρύζι. 2.2. Διάγραμμα σχεδίασης της συσκευής ανύψωσης
Μείωση ροπών αδράνειας και μαζώνπραγματοποιείται χρησιμοποιώντας τους ακόλουθους τύπους γνωστούς από τη μηχανική:
Για περιστροφική κίνηση, (2.1)
Για μεταφορική κίνηση, (2.2)
Συνολική ροπή αδράνειας του συστήματος, (2.3)
πού είναι η ροπή αδράνειας του κινητήρα, kg∙m2;
– ροπή αδράνειας του k-ου περιστρεφόμενου στοιχείου, kg∙m 2 ;
– μάζα του i-ου προοδευτικά κινούμενου στοιχείου, kg.
, – μειωμένες ροπές αδράνειας στοιχείων k και i, kg∙m 2 .
Η ροπή αδράνειας ενός σώματος ως προς έναν άξονα που διέρχεται από το κέντρο βάρους είναι το άθροισμα των προϊόντων της μάζας κάθε στοιχειώδους σωματιδίου του σώματος επί το τετράγωνο της απόστασης από το αντίστοιχο σωματίδιο στον άξονα περιστροφής
Οπου R j– ακτίνα αδράνειας
i k– σχέση μετάδοσης της κινηματικής αλυσίδας μεταξύ του άξονα του κινητήρα και του k-ου στοιχείου,
– γωνιακές ταχύτητες του άξονα του κινητήρα και του k-ου στοιχείου, s -1.
πού είναι η ακτίνα μεταφοράς του προοδευτικά κινούμενου στοιχείου i στον άξονα του κινητήρα, m,
– ταχύτητα κίνησης του προοδευτικά κινούμενου στοιχείου i, m/s.
Η ακτίνα αδράνειας είναι η απόσταση από τον άξονα περιστροφής (που διέρχεται από το κέντρο βάρους) στην οποία πρέπει να τοποθετηθεί η μάζα του εν λόγω σώματος, συγκεντρωμένη σε ένα σημείο, προκειμένου να ικανοποιηθεί η ισότητα
Φέρνοντας στιγμές και δυνάμεις, ενεργώντας στα στοιχεία στον άξονα του κινητήρα, εκτελούνται ως εξής:
Πρώτη επιλογή: μεταφορά ενέργειας από τον κινητήρα στο μηχάνημα εργασίας
Για περιστροφικά κινούμενα στοιχεία, (2.6)
Για προοδευτικά κινούμενα στοιχεία. (2.7)
Δεύτερη επιλογή: η ενέργεια μεταφέρεται από το μηχάνημα εργασίας στον κινητήρα
Για περιστροφικά κινούμενα στοιχεία, (2.8)
Για προοδευτικά κινούμενα στοιχεία. (2.9)
Σε αυτές τις εκφράσεις:
– ροπή που ενεργεί στο στοιχείο k, N∙m;
– δύναμη που επενεργεί στο στοιχείο i, N;
– μειωμένη ροπή (ισοδύναμο), N∙m;
– απόδοση της κινηματικής αλυσίδας μεταξύ των στοιχείων k και i και του άξονα του κινητήρα.
Χρησιμοποιώντας τα παραπάνω σχήματα υπολογισμού, προσδιορίζονται οι παράμετροι, η σταθερότητα και η φύση των μεταβατικών διεργασιών σε ένα μηχανικό σύστημα.
Η δυναμική της ηλεκτρικής κίνησης, κατά κανόνα, καθορίζεται από το μηχανικό μέρος της μετάδοσης κίνησης καθώς είναι πιο αδρανειακό. Για να περιγράψουμε τους μεταβατικούς τρόπους λειτουργίας, είναι απαραίτητο να συνθέσουμε μια εξίσωση κίνησης για την ηλεκτρική κίνηση που λαμβάνει υπόψη όλες τις δυνάμεις και τις ροπές που δρουν σε μεταβατικές καταστάσεις.
Η πιο βολική μέθοδος για τη σύνθεση των εξισώσεων κίνησης των μηχανισμών είναι η μέθοδος των εξισώσεων Lagrange του δεύτερου είδους. Η πολυπλοκότητα της εξίσωσης κίνησης θα εξαρτηθεί από το σχέδιο σχεδιασμού του μηχανικού τμήματος της κίνησης που έχουμε επιλέξει. Στις περισσότερες πρακτικές περιπτώσεις, επιλέγεται ένα σχέδιο σχεδίασης μίας μάζας, μειώνοντας ολόκληρο το σύστημα μηχανών εργασίας ηλεκτροκινητήρα (EM-RM) σε μια άκαμπτη μειωμένη μηχανική ζεύξη.
Ένα σύστημα μονής μάζας (άκαμπτος μειωμένος σύνδεσμος) είναι ένας σύνδεσμος ολοκλήρωσης. Στην περίπτωση που η κινηματική αλυσίδα της ηλεκτρικής κίνησης περιέχει μη γραμμικές συνδέσεις, οι παράμετροι των οποίων εξαρτώνται από τη θέση των μεμονωμένων συνδέσμων του μηχανισμού (ζεύγη στροφάλου - μπιέλα, μηχανισμός παλινδρόμησης κ.λπ.), η κίνηση ενός -Το σύστημα μάζας περιγράφεται από μια μη γραμμική διαφορική εξίσωση με μεταβλητούς συντελεστές. Οι ροπές που περιλαμβάνονται σε αυτή την εξίσωση στη γενική περίπτωση μπορεί να είναι συναρτήσεις πολλών μεταβλητών (χρόνος, ταχύτητα, γωνία περιστροφής).
Όπως προκύπτει από το μπλοκ διάγραμμα, η ροπή του κινητήρα είναι μια ενέργεια ελέγχου και η ροπή αντίστασης είναι μια ενοχλητική ενέργεια.
το άθροισμα της ροπής του κινητήρα και της ροπής αντίστασης. Σε ορισμένες περιπτώσεις, η ροπή του κινητήρα, καθώς και η ροπή αντίστασης, μπορούν να κατευθυνθούν τόσο προς την κατεύθυνση της κίνησης του ρότορα όσο και ενάντια σε αυτήν την κίνηση. Ωστόσο, σε όλες τις περιπτώσεις, ανεξάρτητα από τη φύση οδήγησης ή πέδησης της ροπής του κινητήρα και της ροπής αντίστασης, στις εργασίες μιας ηλεκτρικής κίνησης, διακρίνονται ακριβώς τα υποδεικνυόμενα στοιχεία της ροπής που προκύπτει. Το τελευταίο καθορίζεται από το γεγονός ότι τις περισσότερες φορές η ροπή αντίστασης καθορίζεται εκ των προτέρων και η ροπή του κινητήρα αποκαλύπτεται κατά τη διαδικασία υπολογισμού και σχετίζεται στενά με τις τρέχουσες τιμές στις περιελίξεις του, οι οποίες καθιστούν δυνατή την εκτίμηση της θέρμανσης του κινητήρα.
Στα συστήματα ηλεκτροκίνησης, ο κύριος τρόπος λειτουργίας μιας ηλεκτρικής μηχανής είναι ο κινητήρας. Στην περίπτωση αυτή, η ροπή αντίστασης έχει χαρακτήρα πέδησης σε σχέση με την κίνηση του ρότορα και δρα προς τη ροπή του κινητήρα. Επομένως, η θετική φορά της ροπής αντίστασης λαμβάνεται αντίθετη από τη θετική κατεύθυνση της ροπής του κινητήρα, ως αποτέλεσμα της οποίας η εξίσωση (2.8) στο J= const μπορεί να αναπαρασταθεί ως:
Η εξίσωση (2.9) ονομάζεται η βασική εξίσωση κίνησης της ηλεκτρικής κίνησης. Στην εξίσωση (2.9), οι ροπές είναι αλγεβρικές και όχι διανυσματικές ποσότητες, αφού και οι δύο ροπές Μ και ενεργούν σε σχέση με τον ίδιο άξονα περιστροφής.
![]()
όπου είναι η γωνιακή επιτάχυνση κατά την περιστροφική κίνηση.
Η δεξιά πλευρά της εξίσωσης (2.9) ονομάζεται δυναμική ροπή (), δηλ.
Από το (2.10) προκύπτει ότι η κατεύθυνση της δυναμικής ροπής συμπίπτει πάντα με την κατεύθυνση της επιτάχυνσης της ηλεκτροκίνησης.
Ανάλογα με το πρόσημο της δυναμικής ροπής, διακρίνονται οι ακόλουθοι τρόποι λειτουργίας της ηλεκτροκίνησης:
Η ροπή που αναπτύσσεται από τον κινητήρα δεν είναι σταθερή τιμή, αλλά είναι συνάρτηση οποιασδήποτε μεταβλητής, και σε ορισμένες περιπτώσεις πολλών μεταβλητών. Αυτή η συνάρτηση καθορίζεται αναλυτικά ή γραφικά για όλες τις πιθανές περιοχές αλλαγής της. Η ροπή αντίστασης μπορεί επίσης να είναι συνάρτηση οποιασδήποτε μεταβλητής: ταχύτητα, διαδρομή, χρόνος. Αντικατάσταση στην εξίσωση κίνησης αντί για Μ και L/s των συναρτήσεων τους οδηγεί στη γενική περίπτωση σε μια μη γραμμική διαφορική εξίσωση.
Η εξίσωση κίνησης σε διαφορική μορφή (2.9) ισχύει για σταθερή ακτίνα περιστροφής της περιστρεφόμενης μάζας. Σε ορισμένες περιπτώσεις, για παράδειγμα, με την παρουσία ενός μηχανισμού στροφάλου (βλ. Εικ. 2.2, δ), στην κινηματική αλυσίδα της μετάδοσης κίνησης, η ακτίνα αδράνειας αποδεικνύεται ότι είναι μια περιοδική συνάρτηση της γωνίας περιστροφής. Σε αυτήν την περίπτωση, μπορείτε να χρησιμοποιήσετε την ολοκληρωμένη μορφή γραφής της εξίσωσης κίνησης, με βάση την ισορροπία της κινητικής ενέργειας στο σύστημα:
![]() (2.11)
(2.11)
Οπου J((ο !/2) – απόθεμα κινητικής ενέργειας της κίνησης για την εξεταζόμενη χρονική στιγμή. 7,(0)^,/2) – αρχικό απόθεμα κινητικής ενέργειας του κινητήρα.
Διαφοροποιώντας την εξίσωση (2.11) ως προς το χρόνο, λαμβάνοντας υπόψη το γεγονός ότι το 7 είναι συνάρτηση της γωνίας περιστροφής<р, получаем:
![]() (2.12)
(2.12)
Αφού , τότε διαιρώντας το (2.12) με τη γωνιακή ταχύτητα<о, получим уравнение движения при 7 =J[
![]() (2.13)
(2.13)
Σε ορισμένες περιπτώσεις, συνιστάται να λαμβάνεται υπόψη η κίνηση στο σώμα εργασίας μιας μηχανής παραγωγής (τέτοια προβλήματα συχνά προκύπτουν για μηχανές ανύψωσης και μεταφοράς με προοδευτικά κινούμενο σώμα εργασίας). Σε αυτή την περίπτωση, θα πρέπει να χρησιμοποιηθούν εξισώσεις για μεταφορική κίνηση. Η εξίσωση κίνησης της ηλεκτρικής κίνησης για μεταφορική κίνηση λαμβάνεται με τον ίδιο τρόπο όπως για την περιστροφική κίνηση. Οπότε πότε Τ = const η εξίσωση κίνησης παίρνει τη μορφή:
Στο t =f)