Ο ελιγμός ενός στόχου στο οριζόντιο επίπεδο καταλήγει στην αλλαγή πορείας και ταχύτητας πτήσης. Η επιρροή ενός ελιγμού εναέριου στόχου στο πρώτο και το δεύτερο στάδιο καθοδήγησης μαχητικού χρησιμοποιώντας τη μέθοδο "Maneuver" εκδηλώνεται με διαφορετικούς τρόπους.
Ας υποθέσουμε ότι η καθοδήγηση πραγματοποιείται στο πρώτο στάδιο, όταν ο εναέριος στόχος και το μαχητικό βρίσκονταν αντίστοιχα σε σημεία ΣΕ Και ΕΝΑ (Εικ. 7.9.), και η συνάντησή τους ήταν δυνατή στο σημείο Ετσι .
Ρύζι. 7.9. Επίδραση ελιγμού στόχου στο οριζόντιο επίπεδο
στο μονοπάτι πτήσης ενός μαχητικού
Αν ο στόχος αέρα βρίσκεται στο σημείο ΣΕ ελιγμένη πορεία και χρόνος t γύρισε στη γωνία w t , τότε για να ακολουθήσει ο μαχητής εφαπτομένη στο τόξο στροφής του δεύτερου σταδίου καθοδήγησης, η πορεία του πρέπει να αλλάξει κατά γωνία κατά τον ίδιο χρόνο w και t . Αφού ο εναέριος στόχος ολοκληρώσει τον ελιγμό, θα καταστεί δυνατή μια συνάντηση μαζί του στο σημείο ΜΕ και το μήκος της διαδρομής του εναέριου στόχου προς το σημείο θα αλλάξει σε DSc.
Αν φανταστούμε ότι το σημείο εκκίνησης της στροφής κινείται μαζί με το TC, που βρίσκεται σε σχέση με αυτό στο ίδιο διάστημα και απόσταση με το μαχητικό τη στιγμή που ξεκινά η στροφή, τότε ο μαχητής καθοδηγείται προς αυτό το σημείο χρησιμοποιώντας την «Παράλληλη προσέγγιση "μέθοδος. Εάν το CC βρίσκεται σε μεγάλη απόσταση Πριν από έναν μαχητή, σε σύγκριση με τον οποίο το μεσοδιάστημα Εγώ και προληπτική απόσταση στροφής Dupr μπορεί να παραμεληθεί, τότε γενικά οι ιδιότητες της μεθόδου «Maneuver» είναι κοντά στις ιδιότητες της μεθόδου «Parallel Approach».
Σε μια μεταγενέστερη συνάντηση μαχητών με στόχο (DSc > 0) την οδηγεί να απομακρυνθεί από τον μαχητή (DΘ και > 0) , και η στροφή προς τον μαχητή οδηγεί σε μια προηγούμενη συνάντηση. Ως εκ τούτου, ένα μέτρο για την εξουδετέρωση του ελιγμού πορείας του στόχου, όπως με την καθοδήγηση με τη μέθοδο της «Παράλληλης Προσέγγισης», μπορεί να είναι η ταυτόχρονη στόχευση ομάδων μαχητών σε αυτόν από διαφορετικές κατευθύνσεις.
Καθώς η απόσταση από το TC μειώνεται, η διαφορά μεταξύ των ιδιοτήτων της μεθόδου «Maneuver» και των ιδιοτήτων της μεθόδου «Parallel Approach» γίνεται όλο και πιο εμφανής. Κατά τη διάρκεια της περιστροφής του VT, το μαχητικό πρέπει να στρίβει σε όλο και μεγαλύτερες γωνίες, δηλαδή η γωνιακή του ταχύτητα w αυξάνεται.
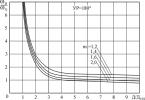
Αλλαγή στην αξία ραβδί όταν ένα μαχητικό πετά σε πορεία σύγκρουσης με εναέριο στόχο (UR = 180°) χαρακτηρίζει τη γραφική παράσταση της σχέσης μεταξύ γωνιακών ταχυτήτων w και / w γ από το εύρος, εκφραζόμενο σε κλάσματα της απόστασης στροφής του μολύβδου D/Dupr.
Όπως φαίνεται από το γράφημα, σε μεγάλες αποστάσεις (D/Dupr = 5÷ 10) στάση w και / w γ διαφέρει ελαφρώς από τη μονάδα, δηλαδή η γωνιακή ταχύτητα του μαχητή διαφέρει ελαφρώς από τη γωνιακή ταχύτητα του στόχου ελιγμών. Με μείωση της εμβέλειας, σε περίπου τρεις Σούπερ , η αξία του wi μεγαλώνει εντατικά, και όταν ο μαχητής πλησιάζει το σημείο εκκίνησης της στροφής (D/Dupr = 1)w και αυξάνεται στο άπειρο.
Έτσι, όταν στοχεύετε χρησιμοποιώντας τη μέθοδο "Maneuver" σε ένα CC ελιγμών, είναι σχεδόν αδύνατο να φέρετε το μαχητικό στο σημείο στο οποίο αρχίζει η στροφή με την υπολογισμένη ακτίνα.

Ρύζι. 7.10. Εξάρτηση του λόγου των γωνιακών ταχυτήτων w και / w γ κατά τον ελιγμό του στόχου
στο πρώτο στάδιο καθοδήγησης σε σχέση με D/Dupr
Κατά τη διαδικασία καθοδήγησης στο πρώτο στάδιο, ο εναέριος στόχος μπορεί να ελίσσεται επανειλημμένα. Έτσι, για παράδειγμα, ένας εναέριος στόχος σε ένα σημείο ΣΕ 1 μπορεί να ενεργοποιήσει το μαχητή, με αποτέλεσμα ένα σημείο Α'1 πρέπει να απομακρυνθεί από την προηγούμενη πορεία του και να αλλάξει η φορά της προκαθορισμένης στροφής. Ως αποτέλεσμα, η τροχιά του μαχητή στο πρώτο στάδιο καθοδήγησης μετατρέπεται από μια ευθεία γραμμή σε μια σύνθετη γραμμή που αποτελείται από τόξα στροφής με μεταβλητή ακτίνα και ευθύγραμμα τμήματα μεταξύ τους. Όλα αυτά περιπλέκουν την εκτέλεση μιας πτήσης σε αεροπορική μάχη.
Θα εξετάσουμε την επιρροή ενός ελιγμού εναέριου στόχου στο δεύτερο στάδιο καθοδήγησης μαχητικού χρησιμοποιώντας τη μέθοδο "Maneuver" χρησιμοποιώντας την Εικόνα 7.11:

Ρύζι. 7.11. Επίδραση ελιγμού εναέριου στόχου στο οριζόντιο επίπεδο
στο δεύτερο στάδιο καθοδήγησης χρησιμοποιώντας τη μέθοδο «Maneuver» στην πορεία πτήσης του μαχητικού
Ας υποθέσουμε ότι κάποια στιγμή του δεύτερου σταδίου καθοδήγησης το μαχητικό και ο εναέριος στόχος βρίσκονται αντίστοιχα στα σημεία ΕΝΑ Και ΣΕ και να πετύχει τον στόχο στο σημείο Co μαχητής κάνει μια στροφή με ακτίνα Ro και γωνιακή ταχύτητα ραβδί = Vi/ Ro .
Αν για κάποιο χρονικό διάστημα Dt ο εναέριος στόχος θα αλλάξει την κατεύθυνση πτήσης του κατά γωνία w × Dt , τότε η συνάντηση μαζί της θα γίνει δυνατή στο σημείο ΜΕ . Για να φτάσω σε αυτό το σημείο από ένα σημείο ΕΝΑ ο μαχητής θα έπρεπε να κάνει μια στροφή με διαφορετική ακτίνα R . Αλλά εκ των προτέρων Dt θα έπρεπε επιπλέον να στρίψει στη γωνία w και D × Dt .
Έτσι, ο ελιγμός ενός εναέριου στόχου στο δεύτερο στάδιο καθοδήγησης οδηγεί στην εμφάνιση μιας πρόσθετης γωνιακής ταχύτητας στροφής του μαχητικού w και D . Όσο μικρότερη είναι η γωνία στροφής που απομένει UR μαχητής, τόσο μεγαλύτερη είναι η αξία w και D , και καθώς ο μαχητής πλησιάζει στο τελικό σημείο της στροφής w και D αυξάνεται στο άπειρο.
Έτσι, είναι σχεδόν αδύνατο να φέρει το μαχητικό σε μια δεδομένη θέση σε σχέση με έναν εναέριο στόχο ελιγμών στο δεύτερο στάδιο καθοδήγησης χρησιμοποιώντας τη μέθοδο "Maneuver".
Από αυτή την άποψη, στην περίπτωση ελιγμών ενός εναέριου στόχου, στο δεύτερο στάδιο, κατά κανόνα, μεταβαίνουν στην καθοδήγηση του μαχητή χρησιμοποιώντας τη μέθοδο "Pursuit".
Ένας ελιγμός ενός παρακολουθούμενου στόχου, ο οποίος υπερβαίνει σε διάρκεια την περίοδο ενημέρωσης πληροφοριών στην είσοδο του VDU, εκδηλώνεται με την εμφάνιση ενός συστηματικού στοιχείου σε σφάλματα δυναμικού φιλτραρίσματος.
Ας εξετάσουμε, ως παράδειγμα, τη διαδικασία κατασκευής μιας τροχιάς στόχου που φτάνει σε ένα σημείο σι(Εικ. 12.15) κινήθηκε ομοιόμορφα και ευθύγραμμα, και στη συνέχεια ξεκίνησε ένας ελιγμός με μεγάλη (1), μεσαία (2) ή μικρή (3) υπερφόρτωση (διακεκομμένες γραμμές). Με βάση την αξιολόγηση των παραμέτρων του ευθύγραμμου τμήματος της τροχιάς με βάση τα αποτελέσματα φιλτραρίσματος n μετρήσεων (σημειωμένες με κύκλο στο σχήμα), τις τρέχουσες συντεταγμένες του στόχου (διακεκομμένη γραμμή) και τις συντεταγμένες που προέκτασαν σε ( n+1)η κριτική (τρίγωνο).
| ΕΝΑ |
| σι |
Όπως φαίνεται από το σχήμα, μετά την έναρξη του ελιγμού, οι τρέχουσες συντεταγμένες του στόχου, που δίνονται στους καταναλωτές, θα περιέχουν ένα δυναμικό σφάλμα, το μέγεθος του οποίου είναι μεγαλύτερο, όσο μεγαλύτερη είναι η υπερφόρτωση του στόχου κατά τη διάρκεια του ελιγμού και την περίοδο θέασης του χώρου.
Για την αυτόματη παρακολούθηση ενός στόχου υπό αυτές τις συνθήκες, είναι απαραίτητο, πρώτον, να ανιχνευθεί (να αναγνωριστεί) ένας ελιγμός και, δεύτερον, εγκαταλείποντας την υπόθεση της ευθύγραμμης και ομοιόμορφης κίνησης του στόχου, να προσδιοριστούν οι παράμετροι του ελιγμού και, σε αυτή τη βάση, να χρησιμοποιηθούν μια νέα υπόθεση της κίνησης του στόχου.
Υπάρχει ένας αριθμός γνωστών μεθόδων για την ανίχνευση ενός ελιγμού με βάση τα αποτελέσματα των διακριτών μετρήσεων των συντεταγμένων στόχου:
1. Ο λόγος για τη διακοπή του φιλτραρίσματος σύμφωνα με την υπόθεση της ευθύγραμμης ομοιόμορφης κίνησης μπορεί να είναι η υπέρβαση του υπολειπόμενου συντελεστή μιας ορισμένης σταθερής τιμής. Στην περίπτωση αυτή, η απαραίτητη προϋπόθεση για τη συνέχιση του φιλτραρίσματος μετά τη λήψη nΟ βαθμός μπορεί να παρουσιαστεί με την ακόλουθη μορφή:
 ;
;  (1)
(1)
όπου: Δ Π, Δ ρε- σταθερές που καθορίζουν την επιτρεπόμενη τιμή της απόκλισης και εξαρτώνται από την περίοδο ελέγχου του ραντάρ και την αποδεκτή τιμή υπερφόρτωσης στόχου κατά τη διάρκεια του ελιγμού.
P n, D n- τιμές ρουλεμάν και εύρους που μετρήθηκαν στην nth έρευνα.
, - ρουλεμάν και τιμές εύρους που προέκτασαν τη στιγμή της νης μέτρησης.
2. Με υψηλότερες απαιτήσεις για την ποιότητα ανίχνευσης ελιγμών στο οριζόντιο επίπεδο σε συνθήκες τροχιών παρακολούθησης σε ορθογώνιο σύστημα συντεταγμένων, η επιτρεπόμενη τιμή της απόκλισης προσδιορίζεται σε κάθε επανεξέταση και το πρόβλημα επιλύεται ως εξής:
α) με βάση τα αποτελέσματα κάθε μέτρησης συντεταγμένων, υπολογίζονται οι υπολειπόμενες μονάδες των τιμών των συντεταγμένων που προέκτασαν και μετρήθηκαν
 ;
; 
 ;
;
β) υπολογίζεται η διακύμανση των διακριτών σφαλμάτων μέτρησης
όπου σ ρε, σ Π- ριζικά μέσα τετραγωνικά σφάλματα διακριτής μέτρησης εμβέλειας και ρουλεμάν.
γ) υπολογίζεται η διακύμανση των σφαλμάτων παρέκτασης
 ,
,

δ) υπολογίζεται η διακύμανση του συνολικού σφάλματος μέτρησης και παρέκτασης συντεταγμένων
| (5) |
ε) οι τιμές συγκρίνονται ρεΚαι  , όπου επιλέγεται ο συντελεστής για λόγους διασφάλισης αποδεκτής πιθανότητας ψευδούς ανίχνευσης ενός ελιγμού.
, όπου επιλέγεται ο συντελεστής για λόγους διασφάλισης αποδεκτής πιθανότητας ψευδούς ανίχνευσης ενός ελιγμού.
Αν κατά τη σύγκριση αποδειχθεί ότι ρε>  , τότε λαμβάνεται η απόφαση «περιμένοντας ελιγμό». Εάν η ανισότητα ικανοποιηθεί για δεύτερη φορά, τότε λαμβάνεται η απόφαση «ελιγμού» και διακόπτεται το φιλτράρισμα των παραμέτρων της τροχιάς σύμφωνα με την υπόθεση που χρησιμοποιείται.
, τότε λαμβάνεται η απόφαση «περιμένοντας ελιγμό». Εάν η ανισότητα ικανοποιηθεί για δεύτερη φορά, τότε λαμβάνεται η απόφαση «ελιγμού» και διακόπτεται το φιλτράρισμα των παραμέτρων της τροχιάς σύμφωνα με την υπόθεση που χρησιμοποιείται.
3. Χρησιμοποιείται επίσης μια άλλη προσέγγιση για την επιλογή ενός κριτηρίου ανίχνευσης ελιγμών. Σε κάθε έρευνα, υπολογίζεται η συνάρτηση αυτοσυσχέτισης των υπολειμμάτων πολικών συντεταγμένων στην προηγούμενη και την τρέχουσα έρευνα
 ,
,

Εάν δεν υπάρχει ελιγμός, τότε το Δ D nκαι Δ P nανεξάρτητα από ανασκόπηση σε ανασκόπηση και οι συναρτήσεις αυτοσυσχέτισης των υπολειμμάτων είναι μικρές ή και μηδενικές. Η παρουσία του ελιγμού αυξάνει σημαντικά τη μαθηματική προσδοκία του γινομένου των υπολειμμάτων. Η απόφαση για την έναρξη ενός ελιγμού λαμβάνεται όταν οι συναρτήσεις αυτοσυσχέτισης υπερβαίνουν ένα ορισμένο επίπεδο κατωφλίου.
ΔΕΥΤΕΡΗ ΕΡΩΤΗΣΗ ΜΕΛΕΤΗΣ: Παρακολούθηση στόχου κατά τη διάρκεια του ελιγμού.
Στην απλούστερη περίπτωση, όταν ανιχνεύεται η έναρξη ενός ελιγμού μετά την (n+1)-η ακτινοβόληση του στόχου σε δύο σημεία - οι εκτιμώμενες συντεταγμένες στον n-ο έλεγχο (ανοιχτός κύκλος) και οι μετρούμενες συντεταγμένες στο ( nΗ +1)η έρευνα (συμπαγής κύκλος) υπολογίζει το διάνυσμα ταχύτητας του στόχου, το οποίο μπορεί να χρησιμοποιηθεί για τον υπολογισμό των τρεχουσών συντεταγμένων και των συντεταγμένων που προέκτασαν στο ( n+2)η κριτική. Στη συνέχεια, οι συντεταγμένες στόχου που μετρήθηκαν στην τρέχουσα και στις προηγούμενες έρευνες χρησιμοποιούνται για την κατασκευή της τροχιάς στόχου και τον υπολογισμό των συντεταγμένων που προέκτασαν. Ένα φίλτρο που λειτουργεί χρησιμοποιώντας αυτόν τον αλγόριθμο ονομάζεται παρεκβολή δύο σημείων.
Όταν χρησιμοποιείται ένας τέτοιος παρεκβολέας, η απόκλιση των προεκτεινόμενων συντεταγμένων από την πραγματική θέση του στόχου ( L 1, L 2, L 3) με μεγάλη περίοδο προβολής και μεγάλες υπερφορτώσεις στόχου κατά τη διάρκεια ενός ελιγμού μπορεί να είναι αρκετά σημαντικές. Σε αυτή την περίπτωση, οι τρέχουσες συντεταγμένες του στόχου θα δίνονται στους καταναλωτές με μεγάλα σφάλματα. Τα μεγάλα σφάλματα παρέκτασης μπορεί να οδηγήσουν στο επόμενο σημάδι στόχου να βρίσκεται εκτός των ορίων του στροβοσκοπίου αυτόματης παρακολούθησης. Δεδομένου ότι υπάρχουν συνήθως λανθασμένα σημάδια μέσα στο στροβοσκόπιο, ένα από αυτά θα επιλεγεί και θα χρησιμοποιηθεί για να συνεχίσει την τροχιά προς τη λάθος κατεύθυνση και η αυτόματη παρακολούθηση του πραγματικού στόχου θα διακοπεί.
Κατά τη διάρκεια ενός παρατεταμένου ελιγμού με συνεχή υπερφόρτωση, η ακρίβεια της παρακολούθησης του στόχου μπορεί να αυξηθεί προσδιορίζοντας τα ορθογώνια στοιχεία της επιτάχυνσης του στόχου χρησιμοποιώντας τα τρία πρώτα σημάδια που λαμβάνονται σε ένα καμπύλο τμήμα της τροχιάς και φιλτράροντας περαιτέρω την επιτάχυνση. Αυτό το πρόβλημα επιλύεται χρησιμοποιώντας "α-β-γ"- φίλτρο, ο επαναλαμβανόμενος αλγόριθμος του οποίου για την εκτίμηση των συντεταγμένων και του ρυθμού μεταβολής τους παραμένει ο ίδιος όπως στο "α-β"- φίλτρο και την εκτίμηση της επιτάχυνσης στόχου, για παράδειγμα, κατά συντεταγμένες Χκατά την παραλαβή του σήματος στο n-η αναθεώρηση υπολογίζεται με τον τύπο
Χρήση: σε αυτοματοποιημένα ψηφιακά συστήματα για τον εντοπισμό και την επεξεργασία πληροφοριών ραντάρ. Η ουσία της εφεύρεσης: διακριτή μέτρηση ραντάρ των συντεταγμένων ενός εναέριου στόχου, εξομάλυνση των τρεχουσών παραμέτρων της τροχιάς στόχου με αλλαγή στα κέρδη του φίλτρου ανάλογα με τη συσσωρευμένη πιθανότητα του ελιγμού. Το νέο είναι η εγκατάσταση συντελεστών απολαβής φίλτρου τη στιγμή που ο στόχος εισέρχεται στην πιθανή ζώνη ελιγμών, ανάλογα με τη συσσωρευμένη πιθανότητα του ελιγμού. Η αύξηση της ακρίβειας παρακολούθησης επιτυγχάνεται αντισταθμίζοντας τη δυναμική συνιστώσα του σφάλματος παρακολούθησης που προκαλείται από τον ελιγμό στόχο. 3 άρρωστος.
Η εφεύρεση σχετίζεται με ραντάρ και μπορεί να χρησιμοποιηθεί σε αυτοματοποιημένα ψηφιακά συστήματα για τον εντοπισμό και την επεξεργασία πληροφοριών ραντάρ. Υπάρχουν γνωστές μέθοδοι και συσκευές για την παρακολούθηση ενός εναέριου στόχου ελιγμών, που βασίζονται σε διακριτές μετρήσεις ραντάρ συντεταγμένων και τρέχουσα εκτίμηση (εξομάλυνση και προέκταση) των παραμέτρων τροχιάς του (συντεταγμένες και ρυθμοί αλλαγής) Με την υπόθεση ότι κατά την περίοδο παρατήρησης ο στόχος θα κάντε μόνο έναν εσκεμμένο ελιγμό υψηλής έντασης, με Όταν ανιχνεύεται ένας ελιγμός, ελαχιστοποιείται η μνήμη του επαναλαμβανόμενου φίλτρου εξομάλυνσης. Σε αυτή την περίπτωση, αν και αντισταθμίζεται το σφάλμα δυναμικής εξομάλυνσης, που προκαλείται από την ασυμφωνία μεταξύ της υπόθεσης για τον βαθμό του πολυωνύμου που περιγράφει την πραγματική τροχιά του στόχου ελιγμών και της γραμμικής υπόθεσης της κίνησής του, η τυχαία συνιστώσα του σφάλματος εξομάλυνσης αποκτά μια μέγιστη τιμή για μια δεδομένη ακρίβεια μέτρησης συντεταγμένων και το συνολικό σφάλμα αυξάνεται. Από τις γνωστές μεθόδους παρακολούθησης ενός εναέριου στόχου ελιγμών, η πλησιέστερη στον προτεινόμενο από άποψη τεχνικής ουσίας και επιτευχθέντος αποτελέσματος είναι η μέθοδος με την οποία προσδιορίζεται ο ελιγμός με βάση μια ανάλυση του μεγέθους της απόκλισης των σημερινών τιμών των παραμέτρων της παρακολουθούμενης τροχιάς από τις μετρούμενες τιμές τους και συγκρίνοντας αυτή την απόκλιση με μια τιμή κατωφλίου όταν προσδιορίζεται ο ελιγμός, εξομαλύνονται οι παράμετροι τροχιάς με κέρδη φίλτρου ίσα με τη μονάδα Λόγω του γεγονότος ότι κατά την εξομάλυνση των παραμέτρων τροχιάς. Το γεγονός της παρουσίας ενός ελιγμού λαμβάνεται υπόψη, τα σφάλματα εξομάλυνσης με αυτήν τη μέθοδο παραμένουν αρκετά μεγάλα. Ο σκοπός της εφεύρεσης είναι να βελτιώσει την ακρίβεια της παρακολούθησης ενός εναέριου στόχου ελιγμών που πετούν χαμηλά. Αυτό επιτυγχάνεται από το γεγονός ότι στη μέθοδο παρακολούθησης ενός στόχου αέρα ελιγμών χαμηλής πτήσης, με βάση τη διακριτή μέτρηση ραντάρ των συντεταγμένων και την εξομάλυνση των παραμέτρων της τροχιάς του στόχου με χρήση φίλτρου, σε τμήματα ευθείας κίνησης με καθορισμένα κέρδη φίλτρου από το θόρυβο της κατάστασης στόχου, που καθορίζονται από τις σχέσεις ρουλεμάν, σύμφωνα με το ρυθμό αλλαγής του ρουλεμάν και την αλλαγή στους συντελεστές απολαβής του φίλτρου στα τμήματα ελιγμών στόχου, τη στιγμή της εισόδου στο τμήμα τροχιάς στο οποίο σύμφωνα με a priori πληροφορίες σχετικά με τα χαρακτηριστικά τροχιάς, ο ελιγμός είναι δυνατός, το σήμα που φέρει στόχο εξομαλύνεται με συντελεστές κέρδους φίλτρου που ρυθμίζονται σύμφωνα με τη συσσωρευμένη πιθανότητα των στόχων που συνοδεύουν τον ελιγμό: Р n = 1/(N-n+1) , όπου N είναι ο αριθμός των μετρήσεων στην περιοχή ενός πιθανού ελιγμού και n είναι ο αριθμός του κύκλου εξομάλυνσης στην περιοχή ενός πιθανού ελιγμού, από τις αναλογίες ρουλεμάν (p n) + -1 (1) για το ρυθμό μεταβολής του ρουλεμάν (P n) - , όπου a + 2 (2) r  (3) πού είναι η διακύμανση των σφαλμάτων μέτρησης του ρουλεμάν; α είναι η μέγιστη επιτάχυνση του στόχου κατά μήκος του ρουλεμάν κατά τη διάρκεια του ελιγμού. Πιθανότητα σωστής ανίχνευσης του ελιγμού. T είναι η περίοδος ανασκόπησης ραντάρ και τη στιγμή που ανιχνεύεται ο ελιγμός στόχος, το φέρον σήμα εξομαλύνεται μία φορά με συντελεστές κέρδους φίλτρου και , από τις σχέσεις (1) και (2) με την τιμή r από τη σχέση r (4) όπου R είναι η πιθανότητα λανθασμένης ανίχνευσης ενός ελιγμού, και στις επόμενες κύκλους εξομάλυνσης, οι παράμετροι της τροχιάς στόχου εξομαλύνονται με συντελεστές κέρδους φίλτρου, οι οποίοι καθορίζονται από τις σχέσεις
(3) πού είναι η διακύμανση των σφαλμάτων μέτρησης του ρουλεμάν; α είναι η μέγιστη επιτάχυνση του στόχου κατά μήκος του ρουλεμάν κατά τη διάρκεια του ελιγμού. Πιθανότητα σωστής ανίχνευσης του ελιγμού. T είναι η περίοδος ανασκόπησης ραντάρ και τη στιγμή που ανιχνεύεται ο ελιγμός στόχος, το φέρον σήμα εξομαλύνεται μία φορά με συντελεστές κέρδους φίλτρου και , από τις σχέσεις (1) και (2) με την τιμή r από τη σχέση r (4) όπου R είναι η πιθανότητα λανθασμένης ανίχνευσης ενός ελιγμού, και στις επόμενες κύκλους εξομάλυνσης, οι παράμετροι της τροχιάς στόχου εξομαλύνονται με συντελεστές κέρδους φίλτρου, οι οποίοι καθορίζονται από τις σχέσεις
Οπου
(n) (n)
n= ενθ 
m και m είναι τα κέρδη του φίλτρου τη στιγμή που ανιχνεύεται ο ελιγμός στόχος. Οι γνωστές μέθοδοι παρακολούθησης ενός εναέριου στόχου ελιγμών χαμηλής πτήσης δεν έχουν χαρακτηριστικά παρόμοια με τα χαρακτηριστικά που διακρίνουν την προτεινόμενη μέθοδο από το πρωτότυπο. Η παρουσία μιας νέας ακολουθίας ενεργειών καθιστά δυνατή την αύξηση της ακρίβειας παρακολούθησης λόγω εκ των προτέρων πληροφοριών σχετικά με την τροχιά παρακολούθησης ενός εναέριου στόχου και, επομένως, την ελαχιστοποίηση των σφαλμάτων παρακολούθησης που προκύπτουν όταν ο ελιγμός στόχος χάνεται. Κατά συνέπεια, η αξιούμενη μέθοδος ικανοποιεί τα κριτήρια «Νεωτερισμός» και «Εφευρετικό βήμα». Η δυνατότητα επίτευξης θετικού αποτελέσματος από την προτεινόμενη μέθοδο με νέα χαρακτηριστικά που εισήχθησαν οφείλεται στην αντιστάθμιση της επίδρασης του δυναμικού σφάλματος παρέκτασης ρουλεμάν, που προσδιορίζεται από τον ελιγμό στόχο που χάθηκε από τον ανιχνευτή ελιγμών, αλλάζοντας τα κέρδη του φίλτρου σύμφωνα με συσσωρευμένη πιθανότητα του ελιγμού. Στο σχ. 1 δείχνει ένα διάγραμμα ελιγμών στόχου. στο σχ. 2 γραφήματα που απεικονίζουν την αποτελεσματικότητα της προτεινόμενης μεθόδου. στο σχ. Το σχήμα 3 δείχνει ένα ηλεκτρικό μπλοκ διάγραμμα της συσκευής για την εφαρμογή της προτεινόμενης μεθόδου. Δεδομένου ότι οποιοσδήποτε εναέριος στόχος υψηλής ταχύτητας χαμηλής πτήσης που εμφανίζεται ξαφνικά και ανιχνεύεται, για παράδειγμα, σε πλοίο μεταφοράς ραντάρ, θα ταξινομηθεί ως επιτιθέμενος, είναι λογικό να υποθέσουμε ότι αυτός ο στόχος πιθανότατα θα στραφεί προς το πλοίο, εκτελώντας ελιγμός στο σπίτι. Με άλλα λόγια, για να χτυπήσει ένα πλοίο σε μια συγκεκριμένη χρονική στιγμή, ένας εναέριος στόχος υψηλής ταχύτητας χαμηλής πτήσης πρέπει να εκτελέσει έναν ελιγμό, με αποτέλεσμα η παράμετρος κατεύθυνσης του στόχου σε σχέση με το πλοίο να γίνει ίση με το μηδέν. Από αυτή την άποψη, η υπόθεση του υποχρεωτικού ελιγμού στόχου είναι θεμελιωδώς δικαιολογημένη. Στο μέλλον, θα εξετάσουμε ως εναέριο στόχο έναν αντιπλοϊκό πύραυλο κρουζ (ASCM) που θα εκτελεί έναν ελιγμό επιστροφής. Η μέθοδος βασίζεται στη χρήση χαρακτηριστικών τροχιάς του αντιπλοϊκού πυραυλικού συστήματος στο τελικό τμήμα της τροχιάς. Η τροχιά πυραύλων κατά του πλοίου (βλ. Εικ. 1) σε απόσταση από τον στόχο καταστροφής μικρότερη από 30 km περιλαμβάνει τρία χαρακτηριστικά τμήματα της τροχιάς: ένα ευθύ τμήμα πριν από την έναρξη του ελιγμού κατεδάφισης αντιπυραυλικού πυραύλου. περιοχή πιθανού ελιγμού καταγωγής· ευθύ τμήμα της τροχιάς μετά την ολοκλήρωση του ελιγμού επιστροφής. Είναι γνωστό ότι ο ελιγμός καθοδήγησης αντιπλοίων πυραύλων, για παράδειγμα, τύπου «Harpoon», εκτελείται σε αποστάσεις από το σκάφος στόχος 5, 3, 20, 2 km. Μπορεί να υποτεθεί ότι σε αποστάσεις μεγαλύτερες από 20,2 km, η πιθανότητα ελιγμών είναι κοντά στο μηδέν και η ανάγκη περιορισμού των κερδών του φίλτρου οφείλεται μόνο στην παρουσία θορύβου κατάστασης στόχου. Ελλείψει εκ των προτέρων δεδομένων σχετικά με τη μέθοδο εκτόξευσης πυραύλων κατά πλοίων που χρησιμοποιούνται από τον εχθρό σε αυτή τη συγκεκριμένη τακτική κατάσταση, υπάρχει λόγος να υποθέσουμε ότι η έναρξη ενός ελιγμού επιστροφής είναι εξίσου πιθανή οποιαδήποτε στιγμή ο πύραυλος κατά πλοίου βρίσκεται εντός του εύρους αποστάσεων από το πλοίο D min 5,3 km και D max 20,2 km . Ο πύραυλος καλύπτει το καθορισμένο διάστημα εμβέλειας σε
t 1 = 50 s όπου V 290 m/s ταχύτητα πτήσης PCR. Κατά συνέπεια, μπορεί να υποτεθεί ότι κατά τη διάρκεια του χρόνου που ο αντιπλοϊκός πύραυλος βρίσκεται σε απόσταση από το πλοίο, επιτρέποντάς του να ξεκινήσει τον ελιγμό επιστροφής, θα γίνουν μετρήσεις N N +1 + 1 των συντεταγμένων του. Δεδομένου ότι ένας ελιγμός μπορεί να ξεκινήσει με ίση πιθανότητα σε οποιοδήποτε διάστημα συνέντευξης, η πιθανότητα ενός γεγονότος που αποτελείται από την έναρξη ενός ελιγμού στο nο (n 1, 2,) διάστημα είναι a priori ίση με
Π
Εάν η αρχή του ελιγμού δεν ανιχνευτεί στη διάσταση συντεταγμένων (n-1), τότε η συσσωρευμένη πιθανότητα του ελιγμού στην nη διάσταση καθορίζεται από τη σχέση
P=
Η εξάρτηση της διασποράς της επιτάχυνσης του αντιπλοϊκού πυραύλου κατά τη διάρκεια ενός ελιγμού από τη συσσωρευμένη πιθανότητα μπορεί να εκφραστεί ως εξής:
2 a = (1+4P n)(1-P ohm) (5) όπου a είναι η μέγιστη επιτάχυνση του αντιπλοϊκού πυραυλικού συστήματος κατά μήκος του ρουλεμάν κατά τη διάρκεια του ελιγμού (3,5 g).
Προσέξτε την πιθανότητα σωστής ανίχνευσης του ελιγμού. Γνωρίζοντας τη διασπορά της επιτάχυνσης της PCR (α) και υποθέτοντας επίσης ότι είναι γνωστές οι τιμές των σφαλμάτων μέτρησης του ρουλεμάν, είναι δυνατός ο υπολογισμός των τιμών των συντελεστών κέρδους του φίλτρου που είναι βέλτιστες για τις τρέχουσες αναλογίες της διασποράς των σφαλμάτων μέτρησης συντεταγμένων, της επιτάχυνσης που διαταράσσει το ρουλεμάν και της περιόδου παρακολούθησης του ραντάρ: με ρουλεμάν
(P n) (6) με το ρυθμό μεταβολής του ρουλεμάν (P n) όπου o 2 είναι η διακύμανση των σφαλμάτων εκτίμησης του ρουλεμάν.
Διακύμανση σφάλματος μέτρησης ρουλεμάν.
Το R είναι ο συντελεστής συσχέτισης μεταξύ των σφαλμάτων εκτίμησης ρουλεμάν και του ρυθμού μεταβολής του. Οι τιμές των o και R o καθορίζονται από τις ακόλουθες σχέσεις
2 o = + -1
R o = (7)
Αντικαθιστώντας τις σχέσεις (7) στις σχέσεις (2) και (3), λαμβάνουμε τη διασπορά των σφαλμάτων εκτίμησης ρουλεμάν και τον συντελεστή συσχέτισης των σφαλμάτων εκτίμησης ρουλεμάν και τον ρυθμό μεταβολής του και, αντικαθιστώντας την έκφραση (6), παίρνουμε το Τα κέρδη φίλτρου προσδιορίζονται από τη σχέση (1). Είναι προφανές ότι όσο πλησιάζει το pcr σε κάθε ανασκόπηση, η συσσωρευμένη πιθανότητα του ελιγμού αυξάνεται, γεγονός που προκαλεί αύξηση της διασποράς της επιτάχυνσης p cr και, κατά συνέπεια, συνεπάγεται αύξηση των κερδών του φίλτρου και . Όταν ανιχνεύεται ένας ελιγμός, στη συσσωρευμένη πιθανότητα του ελιγμού εκχωρείται η τιμή «ένα» και η διασπορά επιτάχυνσης της PCR υπολογίζεται ως εξής:
= ένα 2 (1-P scrap) (8) όπου P scrap είναι η πιθανότητα ψευδούς ανίχνευσης ενός ελιγμού. Στην περίπτωση αυτή, το r υπολογίζεται από τη σχέση (4), τα κέρδη του φίλτρου αποκτούν τη μέγιστη τιμή τους. Λαμβάνοντας υπόψη τη σύντομη διάρκεια του ελιγμού PCR (1,3 δευτ.), αρκεί μία εξομάλυνση με αυξημένους συντελεστές κέρδους (αυτό επιβεβαιώνεται από τα αποτελέσματα της μοντελοποίησης προσομοίωσης). Η διαδικασία για την αξιολόγηση της πιθανότητας ελιγμού εκτελείται στην περιοχή από 20,2 έως 5,3 km. Μετά την ανίχνευση ενός ελιγμού, τα κέρδη του φίλτρου ρουλεμάν εκχωρούνται τιμές που καθορίζονται μόνο από τον θόρυβο της κατάστασης στόχου, τα κέρδη εμβέλειας παραμένουν σταθερά καθ' όλη τη διάρκεια του χρόνου παρακολούθησης και οι τιμές τους επιλέγονται σύμφωνα με τον θόρυβο της κατάστασης στόχου. Στο σχ. Το Σχήμα 3 δείχνει μια συσκευή για αυτόματη παρακολούθηση ενός στόχου αέρα ελιγμών που εφαρμόζει την προτεινόμενη μέθοδο. Περιέχει έναν αισθητήρα συντεταγμένων μετρήσεων 1, ένα μπλοκ εξομάλυνσης 2, ένα μπλοκ παρέκτασης 3, ένα πρώτο μπλοκ καθυστέρησης 4, ένα μπλοκ μνήμης 5, ένα μπλοκ ανίχνευσης ελιγμών 6, ένα μπλοκ σύγκρισης 7, ένα δεύτερο μπλοκ καθυστέρησης 8, ένα μπλοκ 9 για υπολογισμός κερδών φίλτρου. Η συσκευή για την αυτόματη παρακολούθηση ενός στόχου αέρα ελιγμών αποτελείται από έναν σειριακά συνδεδεμένο αισθητήρα 1 μετρούμενες συντεταγμένες, η είσοδος του οποίου είναι η είσοδος της συσκευής, η έξοδος των μετρούμενων συντεταγμένων του αισθητήρα 1 συνδέεται με την 1η είσοδο του μπλοκ εξομάλυνσης 2 και στην 1η είσοδο του μπλοκ ανίχνευσης ελιγμών 6, η έξοδος του μπλοκ εξομάλυνσης 2 που συνδέεται με την είσοδο του μπλοκ παρέκτασης 3, η 1η έξοδος του μπλοκ παρέκτασης 3 συνδέεται με την είσοδο του μπλοκ σύγκρισης 7 και μέσω το μπλοκ καθυστέρησης 4 στην 4η είσοδο του μπλοκ εξομάλυνσης 2 και στη 2η είσοδο του μπλοκ ανίχνευσης ελιγμών 6, η 2η έξοδος του μπλοκ 3 παρέκταση είναι η έξοδος της συσκευής, η έξοδος του μπλοκ ανίχνευσης ελιγμών 6 συνδέεται με η 2η είσοδος του μπλοκ υπολογισμού κέρδους φίλτρου 9 και μέσω του μπλοκ καθυστέρησης 8 στη 2η είσοδο του μπλοκ μνήμης 5 και στην 3η είσοδο του μπλοκ υπολογισμού κέρδους φίλτρου 9, η έξοδος του μπλοκ Σύγκριση 7 συνδέεται με το 1ο είσοδος του μπλοκ μνήμης 5 και η 1η είσοδος του μπλοκ 9 για τον υπολογισμό των κερδών του φίλτρου, η έξοδος του μπλοκ μνήμης 5 συνδέεται με τη 2η είσοδο του μπλοκ εξομάλυνσης 2, η έξοδος του μπλοκ 9 για τον υπολογισμό των κερδών φίλτρου συνδέεται με το 3ο μπλοκ εισόδου 2 εξομάλυνση. Η συσκευή λειτουργεί ως εξής. Το σήμα βίντεο του τρέχοντος nου κύκλου μέτρησης των συντεταγμένων του παρακολουθούμενου στόχου από την έξοδο της συσκευής λήψης παρέχεται στην είσοδο της συσκευής παρακολούθησης και, κατά συνέπεια, στον αισθητήρα 1 των μετρούμενων συντεταγμένων. Ο αισθητήρας 1 των μετρούμενων συντεταγμένων μετατρέπει το σήμα βίντεο από αναλογική σε ψηφιακή μορφή, επιλέγει το χρήσιμο σήμα και μετρά τις τιμές συντεταγμένων: ρουλεμάν (П n) και εμβέλεια (D n). Ο αισθητήρας μετρούμενων συντεταγμένων 1 μπορεί να υλοποιηθεί σύμφωνα με ένα από τα γνωστά σχήματα ενός αυτόματου ανιχνευτή στόχων αέρα. Οι τιμές των μετρούμενων συντεταγμένων στόχου (P n και D n) με τη μορφή κωδικών σήματος παρέχονται στην 1η είσοδο του μπλοκ εξομάλυνσης 2, το οποίο υλοποιεί τη λειτουργία επεξεργασίας συντεταγμένων ως εξής: όταν n 1, η τρέχουσα εκτίμηση των συντεταγμένων στόχου είναι
= M n, όπου M n = П n, D για n 2, η τρέχουσα εκτίμηση των παραμέτρων τροχιάς στόχου είναι ίση με
= M n, V= (M n-1 -M n)/T o όπου T είναι η περίοδος ανασκόπησης του ραντάρ. για n>2, η τρέχουσα εκτίμηση των παραμέτρων της τροχιάς στόχου είναι ίση με
= +(M)
= +(M)/T όπου και είναι οι συντελεστές στάθμισης (κέρδη φίλτρου).
και οι εκτιμήσεις των συντεταγμένων και ο ρυθμός μεταβολής τους παρεκτείνονται σε μία έρευνα. Από το μπλοκ 2, οι εξομαλυνόμενες τιμές των συντεταγμένων και ο ρυθμός μεταβολής τους παρέχονται στην είσοδο του μπλοκ παρέκτασης 3. Το μπλοκ παρέκτασης 3 δημιουργεί εκτιμήσεις των παραμέτρων τροχιάς που προεκτείνονται σε δεδομένο χρόνο:
= +VT e; = όπου T e είναι η καθορισμένη τιμή των χρονικών διαστημάτων παρέκτασης. Σε αυτή τη συσκευή T e T o, T e T tsu. Σε αυτήν την περίπτωση, οι τιμές συντεταγμένων που προέκτασαν από το χρόνο από την 1η έξοδο παρέχονται μέσω του μπλοκ καθυστέρησης 4 στην 4η είσοδο του μπλοκ εξομάλυνσης 2, όπου χρησιμοποιούνται για τον υπολογισμό των παραμέτρων τροχιάς στον επόμενο κύκλο και στον Η 2η είσοδος του μπλοκ ανίχνευσης ελιγμών 6, όπου βρίσκονται αφαιρείται από τις μετρούμενες τιμές ρουλεμάν που παρέχονται στην 1η είσοδο της μονάδας ανίχνευσης ελιγμών 6 από τον αισθητήρα μετρούμενων συντεταγμένων 1, και η διαφορά που προκύπτει συγκρίνεται με το κατώφλι ως εξής :
P n ->
Οι τιμές κατωφλίου επιλέγονται με βάση την απαιτούμενη πιθανότητα ψευδούς ανίχνευσης ενός ελιγμού. Από την ίδια έξοδο, οι προεκτεινόμενες συντεταγμένες αποστέλλονται στην είσοδο του μπλοκ σύγκρισης 7, όπου οι τιμές του προεκτεινόμενου εύρους συγκρίνονται με το εύρος πιθανού ελιγμού από 5,3 έως 20,2 km. Οι τιμές συντεταγμένων που προεκτείνονται στο χρόνο T e παρέχονται στη 2η έξοδο του μπλοκ παρέκτασης 3 (έξοδος συσκευής) και χρησιμοποιούνται για τη δημιουργία και την έκδοση δεδομένων προσδιορισμού στόχου στους καταναλωτές. Στο μπλοκ σύγκρισης 7, δημιουργείται ένα λογικό σήμα ενός εάν η τιμή της προεκτεινόμενης περιοχής βρίσκεται στην περιοχή των πιθανών τιμών, η οποία από την έξοδο του μπλοκ σύγκρισης 7 παρέχεται στην 1η είσοδο του μπλοκ μνήμης 5, ενώ απαγορεύει την έκδοση κερδών φίλτρου στο μπλοκ εξομάλυνσης 2, ταυτόχρονα το ίδιο σήμα φτάνει στην 1η είσοδο του μπλοκ 9 για τον υπολογισμό των κερδών του φίλτρου και ξεκινά την έξοδο των κερδών στο μπλοκ 2 για εξομάλυνση. Εάν οι τιμές του προεκτεινόμενου εύρους δεν βρίσκονται εντός του διαστήματος εύρους ενός πιθανού ελιγμού, τότε δημιουργείται ένα λογικό μηδενικό σήμα, που απαγορεύει την έκδοση συντελεστών κέρδους από το μπλοκ 9 για τον υπολογισμό των κερδών του φίλτρου και ξεκινά την έκδοση συντελεστών απολαβής από μπλοκ μνήμης 5. Το μπλοκ μνήμης 5 αποθηκεύει τα κέρδη φιλτραρίσματος, οι τιμές των οποίων καθορίζονται από τον θόρυβο της κατάστασης στόχου. Στο μπλοκ 9 για τον υπολογισμό των κερδών του φίλτρου, τα κέρδη υπολογίζονται στην περίπτωση άφιξης ενός λογικού σήματος και απουσίας σήματος ανίχνευσης ελιγμών σύμφωνα με τις σχέσεις (1), (2) και (3), και στην περίπτωση άφιξης σήματος «ανιχνεύθηκε ελιγμός» σύμφωνα με τις σχέσεις (1), (2) και (4). Στο μπλοκ 6, δημιουργείται ένα σήμα "ανιχνεύθηκε ελιγμός" και αποστέλλεται στο μπλοκ 9 για τον υπολογισμό των κερδών του φίλτρου, το ίδιο σήμα αποστέλλεται στο μπλοκ καθυστέρησης 8 και, με καθυστέρηση κατά μία περίοδο ανασκόπησης, αποστέλλεται στα μπλοκ μνήμης 5 και 9 και στο φίλτρο υπολογισμού κέρδη. Η αποτελεσματικότητα της προτεινόμενης μεθόδου αξιολογήθηκε χρησιμοποιώντας μοντελοποίηση προσομοίωσης με τα ακόλουθα αρχικά δεδομένα:
Η εμβέλεια εκτόξευσης του αντιπυραυλικού συστήματος τύπου καμάκι είναι 100 km.
Υπερφόρτωση RCC κατά τη διάρκεια του ελιγμού 4 g.
Διάρκεια ελιγμού 4 s;
Περίοδος αναθεώρησης ραντάρ 2 δευτ.
Ο ελιγμός ξεκινά μεταξύ 13 και 14 ανασκοπήσεων. Στο σχ. Το σχήμα 2 δείχνει την εξάρτηση του κανονικοποιημένου σφάλματος παρέκτασης συντεταγμένων ανά έρευνα από τον αριθμό μέτρησης όπου:
1 προτεινόμενη μέθοδος.
2 γνωστή μέθοδος. Κατά την εφαρμογή της προτεινόμενης μεθόδου, η ακρίβεια της παρέκτασης συντεταγμένων διπλασιάζεται.
Απαίτηση
ΜΕΘΟΔΟΣ ΠΑΡΑΚΟΛΟΥΘΗΣΗΣ ΣΤΟΧΟΥ ΑΕΡΑ ΕΛΙΚΙΣΜΟΥ, με βάση τη διακριτή μέτρηση των συντεταγμένων με ραντάρ, εξομάλυνση των παραμέτρων της τροχιάς στόχου χρησιμοποιώντας ένα φίλτρο σε τμήματα ευθύγραμμης κίνησης με συντελεστές ενισχυτή φίλτρου που καθορίζονται από τον θόρυβο της κατάστασης στόχου, οι οποίοι είναι καθορίζεται από τις σχέσεις: με ρουλεμάν ![]()
όπου j είναι ο τρέχων κύκλος εξομάλυνσης.
από την ταχύτητα αλλαγής ρουλεμάν
και αλλαγή του συντελεστή κέρδους φίλτρου στα τμήματα ελιγμών στόχου, που χαρακτηρίζεται από το ότι τη στιγμή της εισόδου στο τμήμα τροχιάς, στο οποίο είναι δυνατός ένας ελιγμός με βάση a priori πληροφορίες σχετικά με τα χαρακτηριστικά τροχιάς στόχου, το σήμα που φέρει στόχο εξομαλύνεται με κέρδος φίλτρου συντελεστές που καθορίζονται σύμφωνα με τη συσσωρευμένη πιθανότητα ελιγμού του παρακολουθούμενου στόχου,
Pn(Nn+1),
όπου N είναι ο αριθμός των μετρήσεων στην περιοχή του πιθανού ελιγμού.
n αριθμός του κύκλου εξομάλυνσης στο τμήμα εξομάλυνσης στο τμήμα πιθανού ελιγμού από τις σχέσεις ρουλεμάν (1)
με ταχύτητα αλλαγής ρουλεμάν (2) ![]()
![]()

όπου 2 είναι η διακύμανση των σφαλμάτων μέτρησης του ρουλεμάν.
α η μέγιστη επιτάχυνση του στόχου σύμφωνα με το ρουλεμάν κατά τη διάρκεια του ελιγμού·
P o. m πιθανότητα σωστής ανίχνευσης του ελιγμού.
T σχετικά με την περίοδο ανασκόπησης ραντάρ,
και τη στιγμή της ανίχνευσης του ελιγμού στόχου, το φέρον σήμα εξομαλύνεται μία φορά με τα κέρδη του φίλτρου a και b από τις σχέσεις (1) και (2), με την τιμή r από τη σχέση 
όπου P l. Ο. m πιθανότητα λανθασμένης ανίχνευσης ενός ελιγμού και σε επόμενους κύκλους εξομάλυνσης οι παράμετροι τροχιάς εξομαλύνονται με συντελεστές κέρδους φίλτρου, οι τιμές των οποίων αντιστοιχούν σε επόμενους αριθμούς του τρέχοντος κύκλου εξομάλυνσης, οι οποίοι καθορίζονται από τη σχέση 


![]()

όπου i 0, 1, 2, αριθμός κύκλου μετά την ανίχνευση του ελιγμού.
εγκατεστημένη μνήμη φίλτρου λόγω θορύβου κατάστασης στόχου.
m και m του κέρδους του φίλτρου τη στιγμή του ελιγμού του στόχου.
Ως αποτέλεσμα της αρχικής επεξεργασίας πληροφοριών ραντάρ, λαμβάνονται δύο ροές σημαδιών στόχου στην είσοδο του αλγόριθμου αυτόματης παρακολούθησης:
«αληθινοί στόχοι», ομαδοποιημένοι κοντά στην πραγματική θέση των στόχων·
«Ψεύτικοι στόχοι», το ένα μέρος των οποίων συνδέεται με περιοχές παρεμβολών και αντανακλάσεων από τοπικά αντικείμενα και το άλλο κατανέμεται ομοιόμορφα σε όλη την περιοχή προβολής του σταθμού.
Εάν αποφασιστεί ότι ένα συγκεκριμένο σύνολο σημαδιών, το καθένα που λαμβάνεται στη δική του έρευνα ραντάρ, ανήκει στην ίδια τροχιά, τότε η επόμενη εργασία είναι η εκτίμηση των παραμέτρων αυτής της τροχιάς, η οποία συνίσταται στον υπολογισμό των παραμέτρων που αναφέρονται στην παράγραφο 2.2. Χ 0 ,U 0 ,Ν 0 ,V Χ ,V y ,V H ,ένα Χ ,ένα yΚαι ένα H. Εάν υπάρχουν δύο σημάδια στόχου ως αρχικές συντεταγμένες Χ 0 ,U 0 Και Ν 0 οι συντεταγμένες του τελευταίου σημείου και οι συνιστώσες της ταχύτητας γίνονται δεκτές V Χ , V yΚαι V Hυπολογίζονται με τον ίδιο τρόπο όπως για την αυτόματη σύλληψη τροχιάς.
Όταν διακρίνετε μεγαλύτερο αριθμό σημαδιών, είναι δυνατό να μεταβείτε σε ένα πιο σύνθετο μοντέλο κίνησης στόχου και να εξομαλύνετε τις παραμέτρους της τροχιάς. Η εξομάλυνση πραγματοποιείται προκειμένου να μειωθεί η επίδραση των σφαλμάτων στη μέτρηση των συντεταγμένων του στόχου του ραντάρ στην ακρίβεια παρακολούθησης. Τις περισσότερες φορές στο ACS υπάρχει ένα γραμμικό μοντέλο κίνησης στόχου και διαδοχικής εξομάλυνσης των παραμέτρων τροχιάς.
Η ουσία της μεθόδου διαδοχικής εξομάλυνσης είναι ότι οι εξομαλυνόμενες τιμές των παραμέτρων τροχιάς στο επόμενο κ th o6zor προσδιορίζονται από τις εξομαλυνόμενες τιμές που λαμβάνονται σε ( κ-1) αναθεώρηση, και τα αποτελέσματα της τελευταίας κη παρατήρηση. Ανεξάρτητα από τον αριθμό των παρατηρήσεων που έγιναν, μόνο η προηγούμενη εκτίμηση και το αποτέλεσμα της νέας παρατήρησης χρησιμοποιούνται στον επόμενο κύκλο υπολογισμού. Ταυτόχρονα, οι απαιτήσεις για χωρητικότητα αποθήκευσης και ταχύτητα υλικού μειώνονται σημαντικά.
Οι τελικές εκφράσεις για την εξομάλυνση της θέσης και της ταχύτητας στην k-th έρευνα ραντάρ είναι οι εξής:
Και σε αυτούς τους τύπους είναι σαφές ότι η τιμή της εξομαλυνθείσας συντεταγμένης είναι ίση με το άθροισμα που προέκταση αυτή τη στιγμή κ- παρατηρήσεις εξομαλυνόμενων συντεταγμένων U* FE και λαμβάνονται με συντελεστή καποκλίσεις της προεκτεινόμενης συντεταγμένης από το αποτέλεσμα της μέτρησης.
Εξομαλυνόμενη τιμή ταχύτητας σε κη κριτική V * U K είναι το άθροισμα της εξομαλυνθείσας ταχύτητας V * UΚ-1 σε ( κ-1)-ου αναθεώρηση και λαμβάνεται με συντελεστή καύξηση της ταχύτητας που είναι ανάλογη με την απόκλιση.
U=UΚ- U CE.
Ν
 Ρύζι. 2.5. Εξομάλυνση παραμέτρων τροχιάς στόχου.
Ρύζι. 2.5. Εξομάλυνση παραμέτρων τροχιάς στόχου.
Η διακεκομμένη γραμμή στο Σχ. 2.5 σημαίνει την ομαλοποιημένη τροχιά του στόχου, που υπολογίζεται στον υπολογιστή ACS σε κ-η κριτική. Λόγω του ότι οι συντελεστές εξομαλυνόμενων συντεταγμένων κκαι κβρίσκονται εντός 0...1, η εξομαλυνθείσα αρχική συντεταγμένη βρίσκεται στο διάστημα U* CE... U K, και η εξομαλυνόμενη ταχύτητα είναι V * UΚ-1… V * UΚ.
Έχει αποδειχθεί ότι με ευθύγραμμη ομοιόμορφη κίνηση του στόχου, τα σφάλματα παρακολούθησης θα είναι ελάχιστα εάν οι συντελεστές κκαι κυπολογίζονται χρησιμοποιώντας τους τύπους:

 (2.9)
(2.9)
Το σχήμα 2.6 δείχνει την εξάρτηση κκαι καπό τον αριθμό κριτικής κ. Τα γραφήματα στο σχήμα δείχνουν ότι οι συντελεστές προσεγγίζουν ασυμπτωτικά το μηδέν. Στο όριο στο κΑυτό διασφαλίζει την πλήρη εξάλειψη των σφαλμάτων παρακολούθησης στόχου. Στην πράξη, υπάρχουν πάντα αποκλίσεις της τροχιάς στόχου από μια ευθεία γραμμή.
Επομένως, οι τιμές των συντελεστών κκαι κμειωθεί μόνο σε ορισμένα όρια.
Η επίδραση της εξομάλυνσης στην ακρίβεια της παρακολούθησης του στόχου μπορεί να αξιολογηθεί ποιοτικά χρησιμοποιώντας το Σχ. 2.7. Στο τμήμα της ευθύγραμμης κίνησης, το σφάλμα των εξομαλυνόμενων συντεταγμένων στόχου είναι μικρότερο από τις μη εξομαλυνθείσες: τα διακεκομμένα τμήματα βρίσκονται πιο κοντά στην πραγματική τροχιά στόχου από τα τμήματα συμπαγούς γραμμής. Στην περιοχή ελιγμών, λόγω της ασυμφωνίας μεταξύ της πραγματικής φύσης της κίνησης του στόχου και της υποθετικής, προκύπτουν σφάλματα δυναμικής παρακολούθησης. Τώρα τμήματα συμπαγών γραμμών καθορίζουν με μεγαλύτερη ακρίβεια την πραγματική θέση του στόχου σε σύγκριση με τμήματα διακεκομμένων γραμμών.
Στο αυτοματοποιημένο σύστημα ελέγχου αεράμυνας, όταν συνοδεύουν στόχους μη ελιγμούς, η επιλογή των συντελεστών κκαι κπαράγονται με διάφορους τρόπους: μπορούν είτε να υπολογιστούν εκ νέου από τις αρχικές σε ορισμένες τελικές τιμές είτε να παραμείνουν αμετάβλητες καθ' όλη τη διάρκεια της περιόδου συντήρησης. Στην τελευταία περίπτωση, η βέλτιστη διαδοχική εξομάλυνση μετατρέπεται στη λεγόμενη εκθετική εξομάλυνση. Η ανίχνευση του ελιγμού στόχου μπορεί να γίνει οπτικά από τον χειριστή ή αυτόματα. Και στις δύο περιπτώσεις, ο στόχος θεωρείται ότι κάνει ελιγμούς εάν η μετρούμενη συντεταγμένη στόχου διαφέρει από την προεκτεινόμενη κατά ένα ποσό που υπερβαίνει τα επιτρεπόμενα σφάλματα μέτρησης συντεταγμένων.
Ζ
Ρύζι. 2.6. Εξάρτηση των συντελεστών εξομάλυνσης από το Κ.
Ρύζι. 2.7. Η επίδραση των παραμέτρων της τροχιάς εξομάλυνσης στην ακρίβεια της παρακολούθησης του στόχου



Τυπικά, ο υπολογισμός των συντεταγμένων στόχων του ρεύματος (που προεκτείνονται σε μια δεδομένη χρονική στιγμή) είναι χρονισμένος ώστε να συμπίπτει με τις στιγμές εξόδου πληροφοριών σε δείκτες, κανάλια επικοινωνίας, ζώνες μνήμης άλλων αλγορίθμων κ.λπ. Οι προβλεπόμενες τιμές των συντεταγμένων στόχου υπολογίζονται χρησιμοποιώντας οι τύποι:

 (2.10)
(2.10)

Οπου t y- χρόνος παράδοσης, μετρημένος από την τρέχουσα στιγμή t.
Συνήθως t yκατά την αξιολόγηση της κατάστασης του αέρα, ορίζεται από τους διοικητές και κατά την επίλυση άλλων εργασιών επεξεργασίας δεδομένων, διαβάζεται από τη μόνιμη μνήμη του υπολογιστή ACS.
Το τελικό στάδιο της παρακολούθησης στόχου είναι η επίλυση του προβλήματος της συσχέτισης των σημάτων που εμφανίζονται πρόσφατα με τις υπάρχουσες τροχιές. Αυτό το πρόβλημα επιλύεται με τη μέθοδο της μαθηματικής πύλης περιοχών εναέριου χώρου. Η ουσία της έγκειται στη μηχανική επαλήθευση της εκπλήρωσης των ισοτήτων, με τη βοήθεια της οποίας διαπιστώνεται ότι το σήμα ανήκει στην υπό μελέτη περιοχή. Σε αυτή την περίπτωση, χρησιμοποιούνται συχνότερα ορθογώνια ή κυκλικά στροβοσκόπια. Οι παράμετροί τους φαίνονται στο Σχ. 2.8.
Αφήνω ΧΕ, U E - προέκταση συντεταγμένων στόχου σε κάποια χρονική στιγμή t. Για να μάθετε ποια από τις βαθμολογίες που λάβατε στην επόμενη αξιολόγηση σχετίζεται με μια δεδομένη τροχιά, πρέπει να ελέγξετε τις συνθήκες:
Π
Ρύζι. 2.8. Παράμετροι πύλης
|Χ 1 -Χ E | Χ pp; | Υ 1 -Υ E | Υ pp; (2.11)
όταν χρησιμοποιείτε κυκλικό στροβοσκόπιο -
(Χ Εγώ – ΧΕ) 2 + ( Υ Εγώ – ΥΕ) 2 Rσελ, (2.12)
Οπου Χσελίδα, Υ str - διαστάσεις του ορθογώνιου στροβοσκοπίου.
R pp - μέγεθος του κυκλικού στροβοσκοπίου.
Ως αποτέλεσμα της απαρίθμησης όλων των πιθανών ζευγών «τροχίας-σημαδιού», σε κάθε ανασκόπηση καθορίζεται ποια σήματα συνεχίζουν τα υπάρχοντα και ποια ξεκινούν νέες διαδρομές.
Από την περιγραφή των αλγορίθμων για την παρακολούθηση των τροχιών στόχων, είναι σαφές ότι η επεξεργασία πληροφοριών σχετικά με την κατάσταση του αέρα είναι μια διαδικασία πολύ εντατικής εργασίας που απαιτεί πολλή μνήμη RAM και την ταχύτητα του υπολογιστή ACS.