![]() Gama e komponentëve gjysmëpërçues të prodhuar nga kompania Teksas InstrumenteÇipat e shoferit për kontrollin e të gjitha llojeve të motorët elektrikë të cilët, ndërsa përmirësohen, gjejnë gjithnjë e më shumë aplikim të gjerë në një shumëllojshmëri të gjerë të pajisjeve. Kompania ofron zgjidhje për krijimin e disqeve që funksionojnë në një gamë të gjerë rrymash dhe tensionesh, duke siguruar funksionim të besueshëm dhe të përshtatshëm koleksionist,pa furça Dhe motorët stepper me një gamë të plotë mbrojtjesh për rrymën, tensionin dhe temperaturën.
Gama e komponentëve gjysmëpërçues të prodhuar nga kompania Teksas InstrumenteÇipat e shoferit për kontrollin e të gjitha llojeve të motorët elektrikë të cilët, ndërsa përmirësohen, gjejnë gjithnjë e më shumë aplikim të gjerë në një shumëllojshmëri të gjerë të pajisjeve. Kompania ofron zgjidhje për krijimin e disqeve që funksionojnë në një gamë të gjerë rrymash dhe tensionesh, duke siguruar funksionim të besueshëm dhe të përshtatshëm koleksionist,pa furça Dhe motorët stepper me një gamë të plotë mbrojtjesh për rrymën, tensionin dhe temperaturën.
Motorët elektrikë përdoren gjerësisht në mënyrën moderne të jetesës së teknologjisë së lartë. Ky lloj i makinës elektromekanike është ende një nga më të zakonshmet dhe më të kërkuarit. Motorët elektrikë për qëllime të ndryshme janë një nga komponentët kryesorë të çdo prodhimi, ato përdoren gjerësisht në pajisjet e zyrës dhe shtëpiake, në sistemet e monitorimit dhe kontrollit për ndërtesat dhe objektet. Motorët elektrikë kanë gjetur përdorim të gjerë në transport modern. Një e ardhme edhe më emocionuese është përpara për motorët elektrikë në automjetet elektrike dhe robotët.
Me zhvillimin e teknologjisë motorët tradicionalë po përmirësohen dhe po gjejnë fusha të reja aplikimi. Veglat moderne të makinerive me precizion të lartë dhe robotika janë të paimagjinueshme pa motorë elektrikë me sisteme inteligjente menaxhimit. Në tokë, në ajër dhe nën ujë, motorët elektrikë mbeten një konvertues i përdorur gjerësisht energji elektrike te mekanike.
Llojet e motorëve elektrikë, metodat e kontrollit dhe vështirësitë e hasura
I krijuar për herë të parë në 1834 nga shkencëtari rus Jacobi, konvertuesi i energjisë elektrike në lëvizje rrotulluese u quajt një motor elektrik. Që atëherë, ajo është përmirësuar seriozisht - janë shfaqur shumë opsione të reja, por parimet e elektromagnetizmit të përdorura në krijimin e tij janë ende baza e të gjitha modifikimeve të motorëve elektrikë modernë.
Një përcjellës me një rrymë që kalon nëpër të (Figura 1) krijon një fushë magnetike rreth vetes, intensiteti (induksioni magnetik) i së cilës është në proporcion me numrin e rrotullimeve, në rastin e përdorimit të një spirale (N) dhe madhësisë së rryma që kalon nëpër të (I), ku B është induksioni i vektorit magnetik, K - konstante magnetike, N - numri i rrotullimeve, I - forca e rrymës.

Ndryshimi i drejtimit të rrymës ndikon edhe në drejtimin e fushës magnetike të përcjellësit.
Në këtë rast, një përcjellës me rrymë, i vendosur në një fushë magnetike të jashtme, ndikohet nga forca e Lorencit, duke e bërë atë të rrotullohet. Drejtimi i rrotullimit përcaktohet lehtësisht duke përdorur rregullin e mirënjohur të dorës së djathtë për një përcjellës me rrymë në një fushë magnetike (Figura 2). Forca (F) që vepron në një përcjellës në një fushë magnetike është e barabartë me produktin e fuqisë së rrymës (I) në përcjellës nga vektori i induksionit magnetik të fushës (B) dhe gjatësia e përcjellësit (L). F = LIB.

Motorë të krehur
Motorë të krehur rrymë e vazhdueshme(DC i krehur ose BDC, në terminologjinë TI) janë një nga mekanizmat më të zakonshëm të rrotullimit elektromagnetik sot.
Në fushën magnetike të një statori të montuar nga magnet të përhershëm, rrotullohet një rotor me shumë seksione me mbështjellje, të cilat lidhen në çifte dhe në mënyrë alternative përmes lamelave të kolektorëve të ndërruar në boshtin e rotorit (Figura 3). Zgjedhja e një çifti bobinash të aktivizuara kryhet në bazë të ligjit të Lorencit në përputhje me rregullin e Gimlet. Burimi aktual është gjithmonë i lidhur me mbështjellje, linjat e fushës magnetike të të cilave zhvendosen në një kënd afër 90° në krahasim me fushën magnetike të statorit.

Motorët elektrikë të këtij lloji shpesh përdorin një stator me magnet të përhershëm. Ato ju lejojnë të rregulloni lehtësisht shpejtësinë e rrotullimit dhe nuk ndryshojnë kosto e larte.
Një variant i një motori elektrik me 2 dredha-dredha të një lloji të ngjashëm përdoret gjithashtu gjerësisht, por me mbështjellja e statorit në vend të një magneti të përhershëm. Modele të tilla kanë një çift rrotullues të madh fillestar dhe mund të funksionojnë jo vetëm në konstante, por edhe në rrymë alternative. Motorët elektrikë të këtij lloji përdoren pothuajse në mënyrë universale në pajisje të ndryshme shtëpiake.
Disavantazhet e këtij dizajni BDC përfshijnë konsumimin e montimit të furçës-komutatorit gjatë funksionimit. Përveç kësaj, për shkak të ndezjes kur ndërroni mbështjelljet individuale të rotorit, nivel i rritur interferenca elektromagnetike, e cila nuk lejon përdorimin e motorëve të tillë në mjedise shpërthyese.
Një tipar i motorëve BDC është gjithashtu rritja e ngrohjes së rotorit, ftohja e të cilit është e vështirë për shkak të karakteristikat e projektimit motorri.
Përparësitë e motorëve komutator:
- çmim i ulët;
- sistem i thjeshtë kontrolli;
- 2-dredha-dredha motorët e krehur, me çift rrotullues të lartë dhe të aftë për të punuar me rrymë direkte dhe alternative.
Karakteristikat e funksionimit të motorëve të komutatorit:
- furçat kërkojnë mirëmbajtje periodike dhe zvogëlojnë besueshmërinë e motorit;
- gjatë procesit të kalimit, ndodhin shkëndija elektrike dhe ndërhyrje elektromagnetike;
- Është e vështirë të hiqet nxehtësia nga një rotor i mbinxehjes.
Motorë pa furça
Disi më pak të zakonshme në mesin e motorëve DC janë modelet e dizajnit pa furça (BrushLess DC ose BLDC), të cilat përdorin një rotor me magnet të përhershëm që rrotullohen midis elektromagnetëve të statorit (Figura 4). Ndërrimi aktual këtu kryhet në mënyrë elektronike. Ndërrimi i mbështjelljeve të elektromagnetëve të statorit bën që fusha magnetike e rotorit të ndjekë fushën e saj.
Pozicioni aktual i rotorit zakonisht monitorohet nga koduesit ose një sensor i efektit Hall, ose teknologjia përdoret për të matur tensionin e pasme EMF në mbështjellje pa përdorur një sensor të veçantë të pozicionit të rotorit (SensorLess) në këtë rast.
Ndërrimi aktual i mbështjelljeve të statorit kryhet duke përdorur çelësat elektronikë(valvola). Kjo është arsyeja pse motorët BLDC pa furça quhen shpesh motorë "të tipit valvul". Rendi i lidhjes së një çifti mbështjelljesh motorike varet nga pozicioni aktual i rotorit.
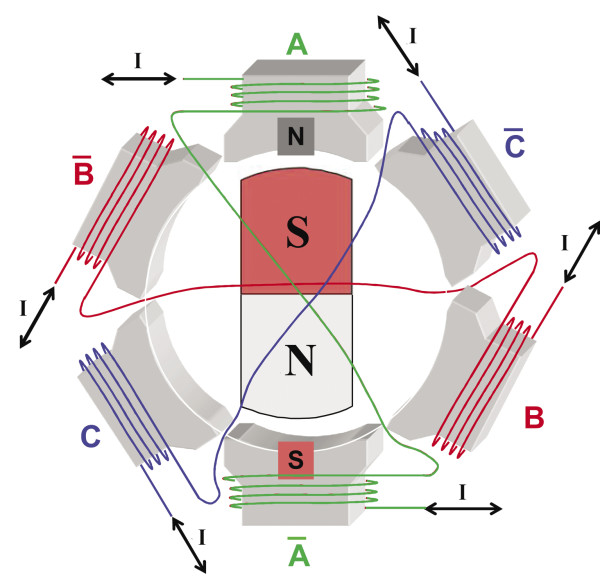
Parimi i funksionimit të BLDC bazohet në faktin se kontrolluesi ndërron mbështjelljet e statorit në mënyrë që vektori i fushës magnetike të statorit të zhvendoset gjithmonë nga një kënd afër 90° ose -90° në raport me vektorin e fushës magnetike të rotorit. Fusha magnetike që rrotullohet gjatë ndërrimit bën që rotori me magnet të përhershëm të lëvizë pas tij.
Kur përdorni një sinjal kontrolli trefazor, vetëm dy palë mbështjellje lidhen gjithmonë me burimin aktual dhe njëra është e shkëputur. Si rezultat, një kombinim i gjashtë gjendjeve përdoret në mënyrë sekuenciale (Figura 5).

Motorët elektrikë pa sensorë të pozicionit të rotorit karakterizohen nga rritja e prodhimit të procesit të prodhimit dhe kostoja më e ulët. Ky dizajn thjeshton vulosjen e terminaleve të lidhura të jashtëm.
Sensorët Hall mund të përdoren si sensorë të shpejtësisë dhe pozicionit të rotorit në BLDC, të cilët ndryshojnë çmim i ulët, por edhe me rezolucion mjaft të ulët. Rezolucioni i rritur sigurohet nga transformatorët rrotullues (zgjidhësit). Ato janë të shtrenjta dhe kërkojnë përdorimin e një DAC, pasi sinjali i tyre i daljes është sinusoidal. Sensorët optikë kanë rezolucion të lartë, por besueshmëri të reduktuar. Figura 6 tregon sinjalet dalëse të llojeve të ndryshme të sensorëve kur rotori i motorit rrotullohet.

Përparësitë e motorëve BLDC:
- efikasitet i lartë;
- mungesa e furçave, duke siguruar besueshmëri të shtuar dhe kosto të reduktuara të mirëmbajtjes;
- lineariteti i rrymës / çift rrotullues;
- shpërndarje e thjeshtuar e nxehtësisë.
Karakteristikat e përdorimit të motorëve BLDC:
- një sistem kontrolli më kompleks me reagime në pozicionin e rotorit;
- valëzim çift rrotullues.
Motorët stepper
Motorët stepper (SM) janë bërë mjaft të përhapur në sistemet e automatizimit dhe kontrollit. Janë një lloj tjetër motorë pa furça rrymë e vazhdueshme. Strukturisht, motorët përbëhen nga një stator mbi të cilin ndodhen mbështjelljet e fushës dhe një rotor i bërë nga materiale magnetike. Motorët stepper me një rotor magnetik bëjnë të mundur sigurimin e çift rrotullues më të madh dhe fiksim të ngurtë të rotorit kur mbështjelljet janë të çaktivizuara.
Gjatë rrotullimit, rotori i motorit lëviz me hapa nën kontrollin e impulseve të fuqisë që furnizohen me mbështjelljet e statorit. Motorët stepper janë të përshtatshëm për t'u përdorur në disqet e makinave dhe mekanizmave që funksionojnë në modalitetin start-stop. Gama e lëvizjes së tyre përcaktohet nga një sekuencë specifike e impulseve elektrike. Motorë të tillë janë shumë të saktë dhe nuk kërkojnë sensorë ose qarqe. reagimet. Këndi i rrotullimit të rotorit varet nga numri i pulseve të kontrollit të furnizuar. Saktësia e pozicionimit (madhësia e hapit) varet nga tiparet e projektimit të motorit, diagrami i lidhjes së mbështjelljeve dhe sekuenca e pulseve të kontrollit që u jepen atyre.
Në varësi të konfigurimit të diagramit të lidhjes së mbështjelljes, motorët stepper ndahen në bipolarë dhe njëpolarë. Një motor bipolar ka në secilën nga dy fazat një mbështjellje të vetme për të dy polet e statorit, e cila duhet të kthehet nga drejtuesi për të ndryshuar drejtimin e fushës magnetike. Një motor bipolar ka dy mbështjellje dhe, në përputhje me rrethanat, katër dalje. Për të kontrolluar një motor të tillë hapës, kërkohet një drejtues urë ose qark gjysmë urë me furnizim me energji 2 polare. Me kontroll bipolar, dy mbështjellje funksionojnë njëkohësisht dhe çift rrotullimi është afërsisht 40% më i madh. Figura 7 tregon sekuencën e sinjaleve të kontrollit gjatë rrotullimit të motorit bipolar.

Një motor unipolar përdor një dredha-dredha në çdo fazë me një terminal të mesëm dhe lejon përdorimin e një qarku më të thjeshtë kontrolli me një ndërprerës për secilën nga katër gjysmë-mbështjelljet.
Motorët me katër dredha-dredha mund të përdoren si në konfigurime bipolare ashtu edhe në unipolare.
Kur rryma rrjedh nëpër njërën nga mbështjelljet, rotori tenton të ndryshojë pozicionin në mënyrë që polet e kundërta të rotorit dhe statorit të vendosen përballë njëri-tjetrit. Për të siguruar rrotullimin e vazhdueshëm të rotorit, mbështjelljet ndërrohen në mënyrë alternative.
Në praktikë ato përdoren menyra te ndryshme furnizimi me energji për katër mbështjelljet e statorit. Më shpesh, përdoren lidhje të çiftuara me mënyra funksionimi me hap të plotë ose gjysmë hapi. Në modalitetin me hap të plotë, një rotor me dy pole, që rrotullohet në fushën magnetike të kalueshme të dy palë mbështjelljesh, mund të zërë katër pozicione (Figura 8).

Mënyra e funksionimit me gjysmë hapi ju lejon të merrni saktësi të dyfishtë të pozicionimit dhe tetë pozicione (Figura 9). Për ta zbatuar atë, shtohet një hap i ndërmjetëm me fuqizimin e njëkohshëm të të katër bobinave.

Modaliteti i mikrostepping ju lejon të rritni ndjeshëm numrin e pozicioneve të ndërmjetme dhe saktësinë e pozicionimit. Ideja e mikroshkallës është të aplikohet në mbështjellje motor stepper në vend të pulseve të kontrollit të një sinjali të vazhdueshëm që i ngjan një sinusoidi të shkallëzuar në formë (Figura 10). Në këtë rast, hapi i plotë ndahet në mikrohapa të vegjël dhe rrotullimi bëhet më i qetë. Modaliteti Microstepping ju lejon të merrni pozicionimin më të saktë. Për më tepër, në këtë mënyrë, dridhja e strehës së natyrshme në motorët stepper zvogëlohet ndjeshëm.

Përparësitë e motorëve stepper:
- kosto e ulët për shkak të mungesës së shpejtësisë së rrotullimit dhe qarqeve të kontrollit të pozicionimit;
- saktësi e lartë e pozicionimit;
- gamë e gjerë e shpejtësive të rrotullimit;
- ndërfaqe e thjeshtë kontrolli me kontrollorët dixhitalë;
- besueshmëri shumë e lartë;
- moment i mirë mbajtjeje.
Karakteristikat e përdorimit të motorëve stepper:
- SD karakterizohet nga fenomeni i rezonancës;
- për shkak të mungesës së reagimeve, humbja e kontrollit të pozicionit është e mundur;
- konsumi i energjisë nuk ulet edhe kur punon pa ngarkesë;
- është shumë e vështirë të punosh shpejtësi të lartë;
- densitet i ulët i fuqisë;
- skemë mjaft komplekse kontrolli.
Zgjidhje tradicionale për kontrollin e motorit elektrik
Një sistem modern i kontrollit të motorit DC me precizion përfshin një mikrokontrollues për përpunimin e të dhënave dhe një njësi kontrolli motorik, që shpesh quhet drejtues. Drejtuesi përfshin një qark logjik për konvertimin e mesazheve të koduara në sinjale kontrolli dixhitale, nga të cilat gjenerohen sinjale analoge në bllokun Gate Driver për të kontrolluar çelsat e fuqisë bazuar në transistorët e efektit në terren (FET). FET mund të jenë pjesë e shoferit ose të vendosen në një bllok të veçantë. Përveç kësaj, drejtuesi përfshin qarqet e mbrojtjes së qarkut të energjisë dhe qarqet e reagimit për të kontrolluar funksionimin e motorit.
Figura 11 tregon opsionet e bllok diagramit për drejtuesit e integruar dhe para-drivers. Secila prej zgjidhjeve ka avantazhet dhe veçoritë e veta. Para-Driver ka një përmirësuar ndjeshëm regjimi i temperaturës, ju lejon të zgjidhni çelsat e jashtëm të fuqisë në përputhje me fuqinë e motorit të lidhur. Një drejtues i integruar me funksione të plota ju lejon të krijoni sisteme kontrolli më kompakte, minimizon lidhjet e jashtme, por e bën shumë më të vështirë sigurimin e kushteve të kërkuara të temperaturës.

Kështu, drejtuesi i integruar TI ka një maksimum temperatura e punës elemente individuale në tabelë mund të arrijë 193°C, por për drejtuesin para shofer kjo shifër nuk i kalon 37°C.

Një nga qarqet më të zakonshme për ndërrimin e mbështjelljeve të motorit është ura "H". Emri i qarkut i referohet konfigurimit të lidhjes, i cili duket si shkronja "H". Kjo qark elektronik ju lejon të ndryshoni lehtësisht drejtimin e rrymës në ngarkesë dhe, në përputhje me rrethanat, drejtimin e rrotullimit të rotorit. Tensioni i aplikuar në mbështjelljet përmes transistorëve të urës mund të jetë ose konstant ose i moduluar duke përdorur PWM. Ura H është projektuar, para së gjithash, për të ndryshuar polaritetin e furnizimit me energji të motorit - anasjelltas (Figura 12), por gjithashtu ju lejon të ngadalësoni rrotullimin duke qarkuar të shkurtër terminalet e mbështjelljes (Figura 13).

Karakteristika më e rëndësishme elementet e fuqisë ura, e cila sot shpesh përdor transistorë me efekt në terren me një portë të izoluar, është vlera e rezistencës së kanalit të hapur midis burimit dhe kullimit të transistorit - RDSON. Vlera RDSON përcakton kryesisht karakteristikat termike të njësisë dhe humbjet e energjisë. Me rritjen e temperaturës, RDSON gjithashtu rritet, dhe rryma dhe voltazhi në mbështjellje zvogëlohen.
Përdorimi i sinjaleve të kontrollit PWM mund të zvogëlojë valëzimin e çift rrotullues dhe të sigurojë rrotullim më të butë të rotorit të motorit. Idealisht, frekuenca PWM duhet të jetë më e lartë se 20 kHz për të shmangur zhurmën akustike. Por me rritjen e frekuencës, humbjet në transistorët e urës gjatë procesit të kalimit rriten.
Për shkak të vetive induktive të ngarkesës në formën e mbështjelljes, forma e rrymës në të nuk korrespondon me formën e tensionit të aplikuar PWM. Pas aplikimit të një impulsi të tensionit, rryma rritet gradualisht, dhe gjatë pauzave rryma gradualisht zbehet për shkak të shfaqjes së mbrapa-EMF në mbështjellje. Pjerrësia e kurbës së rrymës, amplituda dhe frekuenca e pulsimeve ndikojnë në karakteristikat e performancës së motorit (gruajtja e rrotullimit, zhurma, fuqia, etj.).
Për të përshpejtuar zbutjen në mbështjelljet e motorëve elektrikë të rrymës së ngacmuar nga efekti prapa-EMF, përdoren dioda në lidhjen e kundërt, duke shmangur tranzicionet e burimit të kullimit të transistorëve, ose mbështjelljet lidhen me qark të shkurtër përmes tranzicioneve të burimit të kullimit. e dy tranzistorëve të lidhur njëkohësisht në krahë të ndryshëm të urës. Figura 13 tregon tre gjendje të urës: punë, frenim i shpejtë (Fast Decay) dhe frenim i ngadalshëm (Slow Decay).
Dhe më e efektshmja konsiderohet të jetë mënyra e kombinuar (Zbërthimi i përzier), në të cilin, gjatë pauzës midis pulseve të funksionimit, fillimisht funksionojnë diodat që shmangin burimin e shkarkimit të transistorëve, dhe më pas tranzistorët në krahët e poshtëm të urë ndezur.
TI Motor Control Solutions
Komponentët gjysmëpërçues të TI përfshijnë një gamë të gjerë drejtuesish të ndryshëm për kontrollin e motorëve DC. Të gjithë ata kërkojnë një minimum të përbërësve të jashtëm, ju lejojnë të krijoni zgjidhje kompakte për kontrollin e motorëve me tensione funksionimi deri në 60 V, karakterizohen nga besueshmëria e shtuar dhe ofrojnë dizajn të shpejtë dhe të thjeshtë të sistemeve të drejtimit të motorit elektrik.
Karakteristikat inteligjente të integruara në drejtues kërkojnë mbështetje minimale të mikrokontrolluesit të jashtëm (MCU), ofrojnë aftësi të avancuara të ndërrimit të dredha-dredha dhe mbështesin sensorët e jashtëm dhe unazat e kontrollit dixhital. Kompleti i funksioneve mbrojtëse përfshin kufizimin e tensionit të furnizimit, mbrojtjen kundër mbirrymës dhe qarkut të shkurtër, nëntensionit dhe rritjes së temperaturës së funksionimit.
E gjithë sfera e drejtuesve TI është e ndarë në tre seksione: motorë DC stepper, furça dhe pa furçë. Në secilën prej tyre funksionon faqja e internetit e kompanisë sistem i përshtatshëm përzgjedhja e bazuar në një numër parametrash. Ka drejtues të veçantë të projektuar për përdorim me motorë tipe te ndryshme.
Drejtues TI për Stepper Motors
Portofoli i madh i zgjidhjeve të kontrollit të motorit të TI përfshin drejtuesit e motorëve (Figura 14), të cilët janë të disponueshëm si me ndërprerës të integruar të rrymës me bazë FET, ashtu edhe si para-drejtues që i ofrojnë përdoruesit zgjedhjen e çelësave të nevojshëm të energjisë. Në total, gama e modeleve të kompanisë përfshin më shumë se 35 drejtues për SD.

TI ofron zgjedhje e gjerë shumica zgjidhje moderne për kontrollin e lëvizjes dhe pozicionimin e saktë duke përdorur qarqet e kontrollit me mikroshkallë që sigurojnë motorët me lëvizje të qetë në një gamë të gjerë tensioni dhe rryme.
Drejtues të veçantë, duke përdorur një kontrollues kontrolli, ju lejojnë të kontrolloni dy motorë menjëherë, duke pasur për këtë qëllim katër ura të integruara të bazuara në FET. Ka drejtues me FET të integruara, si p.sh. DRV8834, i cili mund të lidhet për të drejtuar dy mbështjellje të motorëve stepper ose të përdorë të njëjtat kunja për të drejtuar dy motorë DC (Figura 15).

Për të lëvizur më mirë rotorin, drejtuesit e motorëve hapësorë përdorin një mekanizëm të personalizueshëm për zbutjen e pulseve aktuale (modalitetet e ngadalta, të shpejta, të prishjes së përzier). Sistemi i llogaritjes me mikrostep mund të jetë i llojeve të mëposhtme:
- i integruar në shofer;
- duke përdorur një sinjal referimi të jashtëm.
Drejtuesit nuk kërkojnë një kontrollues të jashtëm për lëvizjen me mikroshkallë , Dhe . Këtu, hapi i lëvizjes dhe algoritmi i ndërrimit të mbështjelljes llogariten nga një qark i integruar në drejtues.
Drejtues TI për BDC
për ngarje - motorët elektrikë me komutator DC - synohet një familje e veçantë drejtuesish, një numër përfaqësuesish të të cilëve janë paraqitur në figurën 16. Ato ofrojnë mbrojtje të plotë nga tensioni dhe rryma e tepërt, qarku i shkurtër dhe mbinxehja. Falë aftësive të ndërfaqes së kontrollit, këta drejtues mundësojnë funksionim të thjeshtë dhe efikas të motorëve. Përdoruesit mund të kontrollojnë një ose më shumë motorë me një tension operativ prej 1.8...60 V duke përdorur një çip të vetëm.

Drejtuesit e familjes janë të disponueshëm si me ndërprerës të integruar të rrymës ashtu edhe si para-drejtues. Ato kërkojnë një minimum komponentësh shtesë, ofrojnë zgjidhje kompakte, zvogëlojnë kohën e zhvillimit dhe ju lejojnë të lëshoni shpejt produkte të reja në treg.
Modaliteti i gjumit minimizon konsumin e energjisë kur është i papunë dhe siguron aktivizim më të shpejtë kur motori ndizet. Për të kontrolluar shpejtësinë e rrotullimit, sinjalet e jashtme PWM ose sinjalet FHASE/ENABLE mund të përdoren për të zgjedhur drejtimin e rrotullimit dhe për të ndezur çelësat e urës së daljes.
Duke pasur katër ura dalëse, drejtuesi është i aftë të kontrollojë dy motorë, ose një motor dhe dy BDC, ose katër BDC, duke përdorur ndërfaqen e kontrollit SPI.
Figura 17 tregon diagrami funksional një drejtues i thjeshtë për të kontrolluar një motor të krehur.

Drejtues TI për BLDC
Drejtuesit e motorëve pa furça të TI, ose BLDC-të, mund të përfshijnë një urë të integruar të energjisë ose të përdorin transistorë të jashtëm të fuqisë. Qarku për gjenerimin e sinjaleve të kontrollit 3-fazor mund të jetë gjithashtu i jashtëm ose i integruar.
Kontrolloni familjen e shoferit motorë elektrikë pa furça përfshin modele me parime të ndryshme kontrolli dhe me çift rrotullues të ndryshëm. Këta drejtues ofrojnë nivele të ndryshme zhurmë gjatë drejtimit të BDLC, ideale për përdorim në pajisje industriale, sistemet e automobilave dhe teknologji të tjera. Per te garantuar funksionim i besueshëm motorët elektrikë, drejtuesit ofrojnë një grup të plotë mbrojtjesh kundër mbirrymës, tensionit dhe temperaturës. Figura 18 tregon vetëm disa nga drejtuesit BLDC 3-fazore në linjën e gjerë dhe në rritje të produkteve të TI.

Për të monitoruar pozicionin aktual të rotorit rrotullues, sensorë të jashtëm të llojeve të ndryshme ose një qark kontrolli mund të përdoren për të përcaktuar pozicionin e rotorit me vlerën e EMF-së së pasme (Back Electromotive Force, BEMF).
Kontrolli mund të kryhet duke përdorur PWM, sinjale analoge ose nëpërmjet ndërfaqeve standarde dixhitale. Grupe parametrash të konfigurueshëm për kontrollin e rrotullimit mund të ruhen në memorien e brendshme jo të paqëndrueshme.
Figura 19 tregon një drejtues inteligjent për BLDC që funksionon në një gamë të gjerë temperaturash prej 40...125°C me ndërprerës të integruar të energjisë në transistorët me efekt në terren, me një rezistencë kanali të hapur prej vetëm 250 mOhm. Me një gamë të tensionit operativ prej 8...28 V, drejtuesi mund të sigurojë një rrymë nominale prej 2 A dhe një rrymë maksimale prej 3 A.

Drejtuesi nuk kërkon një sensor të jashtëm për të monitoruar pozicionin e rotorit, por mund të përdorë një rezistencë të jashtme për të monitoruar fuqinë e konsumuar nga motori. përmban konsum të ulët të energjisë prej vetëm 3 mA në modalitetin e gatishmërisë. Dhe në model kjo shifër është sjellë në nivelin 180 μA.
Ndërfaqja e integruar I2C ofron diagnostifikim dhe konfigurim, akses në regjistrat e kontrollit të funksionimit të qarkut logjik dhe profilet e funksionimit të drejtuesve të ruajtur në memorien EEPROM.
Një grup i avancuar funksionesh mbrojtëse siguron që motori të ndalojë në rast të mbirrymës dhe nëntensionit. Sigurohet kufizimi i tensionit të hyrjes. Mbrojtja nga mbirryma funksionon pa përdorur një rezistencë të jashtme. Metodat për përdorimin e mbrojtjes konfigurohen përmes regjistrave të veçantë.
konkluzioni
Motorët elektrikë përdoren gjithnjë e më shumë në një shumëllojshmëri të gjerë pajisjesh, po përmirësohen dhe fitojnë aftësi të reja, kryesisht falë sistemet moderne makinë elektrike.
Portofoli i gjysmëpërçuesve të Texas Instruments përfshin një gamë të gjerë të IC-ve të drejtuesve për kontrollin e të gjitha llojeve të motorëve DC. Bazuar në to, kompania ofron zgjidhje të shkallëzuara në varësi të kërkesave për saktësinë, fuqinë dhe funksionalitetin për krijimin e disqeve që funksionojnë në një gamë të gjerë rrymash dhe tensionesh, duke siguruar funksionim të besueshëm dhe të përshtatshëm të motorëve me furçë, furça dhe stepper me një gamë të plotë mbrojtjesh. për rrymën, tensionin dhe temperaturën.
Drejtues i motorit stepper të transistorit
Unë paraqes në vëmendjen tuaj një drejtues motori bipolar stepper bazuar në transistorë bipolarë të serisë "KT".
Shoferi funksionon sipas parimit të ndjekësit të emetuesit. Sinjali i kontrollit furnizohet në fazën e amplifikimit të montuar në transistorin KT315. Më pas do të godasë urën N nga çifti plotësues KT815 dhe KT 814.
Një fazë amplifikuese është e nevojshme sepse dalja e rrymës nga mikrokontrolluesi nuk është e mjaftueshme për të  hapja e tranzistorëve të fuqisë. Pas tranzistorëve të fuqisë, instalohen dioda për të zbutur vetë-induksionin e motorit.
hapja e tranzistorëve të fuqisë. Pas tranzistorëve të fuqisë, instalohen dioda për të zbutur vetë-induksionin e motorit.
Qarku gjithashtu siguron shtypjen e zhurmës në formën e kondensatorëve prej 3 me 0,1 μF dhe 1 me 100 μF. Meqenëse drejtuesi është projektuar për të punuar me një motor me makinë CD 150 vat, ftohja e tranzistorit nuk është

Motor stepper nga një disk CD i lidhur me një drejtues tranzistor
i instaluar, por rryma maksimale e emetuesit e transistorëve KT814 dhe KT815 është 1.5 A, falë të cilave ky drejtues mund të kthejë motorë edhe më të fuqishëm. Për ta bërë këtë, duhet të instaloni pllaka ftohëse në transistorët e fuqisë.
- Edhe pse motorët bipolarë stepper janë relativisht të shtrenjtë, ata ofrojnë çift rrotullues të lartë për madhësinë e tyre fizike. Sidoqoftë, dy mbështjelljet e motorit kërkojnë tetë transistorë kontrolli të lidhur në katër ura H. Çdo transistor duhet të përballojë mbingarkesat dhe qarqet e shkurtra dhe të rivendosë shpejt funksionalitetin. Dhe shoferi, në përputhje me rrethanat, kërkon qarqe komplekse mbrojtëse me një numër të madh të komponentët pasivë.

Foto 1
Figura 1. Një IC i vetëm në një paketë montimi sipërfaqësor dhe disa komponentë pasivë mund të drejtojnë një motor bipolar stepper.
Kontrolli bipolar i motorit stepper
Shofer motori stepper DIY- Figura 1 tregon një qark alternativ të drejtuesit të motorit bazuar në përforcuesin audio të klasës D të Maxim. Çipi MAX9715 në një paketë montimi në sipërfaqe në miniaturë mund të japë deri në 2,8 W fuqi në një ngarkesë tipike 4 ose 8 ohm. Secila nga dy daljet e mikroqarkut formohet nga ura H të bëra nga MOSFET të fuqishëm, që kontrollojnë çifte linjash OUTR+, OUTR- dhe OUTL+, OUTL-, të cilat lidhen përkatësisht me mbështjelljet A dhe B të motorit stepper. Çdo çift gjeneron një sinjal pulsi të moduluar me gjerësi diferenciale me një frekuencë nominale komutimi prej 1,22 MHz. Niveli i ulët i zhurmës së gjeneruar nga qarku eliminon nevojën për filtra dalës.
Kondensatorët e shkëputjes
Kondensatorët C1, C3, C4 dhe C6 shërbejnë si shkëputës për hyrjet e fuqisë dhe paragjykimit, ndërsa C5 dhe C7 sigurojnë funksione ruajtëse për amplifikatorët dalës të klasës D me fuqi të lartë, kondensatorët C8 dhe C9 kufizojnë gjerësinë e brezit të amplifikatorit në 16 Hz, dhe rruazat e ferritit L2. dhe L3 zbut interferencën elektrike nga kabllot e gjata. Filtri në formë U C1, C2, L1 shtyp zhurmën në hyrjen e fuqisë së çipit IC1. Sinjalet hyrëse të mikroqarqeve Step_A dhe Step_B, të cilat kontrollojnë përkatësisht kanalet e djathta dhe të majta të motorit, mund të gjenerohen nga çdo kontrollues i përshtatshëm. Qarqet e brendshme mbrojnë amplifikatorin nga qarqet e shkurtra dhe mbinxehja në rast të dështimit të motorit stepper ose lidhjes së gabuar të terminaleve të tij.

Tabela 1
Ilustrim i sekuencës së pulsit
Tabela 1 ilustron sekuencën e pulseve Hapi_A dhe Hapi_B që kontrollojnë rrotullimin e një motori tipik stepper në një drejtim duke aplikuar vazhdimisht kombinime sinjalesh nga 0 në 4. Hapi 4 e kthen boshtin e motorit në pozicioni fillestar, duke përfunduar një rrotullim 360°. Për të ndryshuar drejtimin e rrotullimit të motorit, filloni të formoni një diagram kohor të pulseve nga fundi i tabelës dhe lëvizni në mënyrë sekuenciale lart përgjatë tij. Duke aplikuar një tension të ulët të nivelit logjik në hyrjen SHDN të mikroqarkut (pin 8), mund të fikni të dy kanalet e amplifikatorit. Format e valëve në hyrjet dhe daljet e qarkut janë paraqitur në Figurën 2.
Një hyrje e shkurtër në teorinë dhe llojet e drejtuesve, këshilla për zgjedhjen e drejtuesit optimal për një motor stepper.
Nëse dëshironiblej shoferin e motorit stepper , klikoni në informatorin në të djathtë
Disa informacione që mund t'ju ndihmojnë zgjidhni drejtuesin e motorit stepper.
Motor stepper - motor me qark kompleks menaxhim që kërkon të veçanta Pajisje elektronike– ngasësi i motorit stepper. Drejtuesi i motorit stepper merr sinjale logjike STEP/DIR në hyrjen e tij, të cilat zakonisht përfaqësohen nga të larta dhe nivel i ulët tension referencë 5 V, dhe në përputhje me sinjalet e marra ndryshon rrymën në mbështjelljet e motorit, duke bërë që boshti të rrotullohet në drejtimin e duhur në një kënd të caktuar. >Sinjalet STEP/DIR gjenerohen nga një kontrollues CNC ose një kompjuter personal që ekzekuton një program kontrolli si Mach3 ose LinuxCNC.
Detyra e shoferit është të ndryshojë rrymën në mbështjellje sa më efikase të jetë e mundur, dhe meqenëse induktiviteti i mbështjelljes dhe rotori i motorit hibrid stepper ndërhyjnë vazhdimisht në këtë proces, drejtuesit ndryshojnë shumë në karakteristikat e tyre dhe cilësinë e rezultatit. lëvizjes. Rryma që rrjedh në mbështjellje përcakton lëvizjen e rotorit: madhësia e rrymës përcakton çift rrotullues, dinamika e saj ndikon në uniformitetin, etj.
Llojet (llojet) e drejtuesve SD
Drejtuesit ndahen në disa lloje sipas metodës së pompimit të rrymës në mbështjellje:
1) Drejtuesit e tensionit konstant
Këta drejtues aplikojnë një nivel tensioni konstant në mbështjelljet alternative, rryma që rezulton varet nga rezistenca e mbështjelljes dhe, në shpejtësi të lartë, nga induktiviteti. Këta drejtues janë jashtëzakonisht joefikas dhe mund të përdoren vetëm me shpejtësi shumë të ulëta.
2) Drejtues me dy nivele
Në drejtuesit e këtij lloji, rryma në dredha-dredha së pari rritet në nivelin e kërkuar duke përdorur tension të lartë, atëherë burimi i tensionit të lartë fiket dhe forca e nevojshme rryma mbështetet nga një burim i tensionit të ulët. Drejtues të tillë janë mjaft efektivë, ndër të tjera zvogëlojnë ngrohjen e motorëve dhe ndonjëherë mund të gjenden në pajisjet e nivelit të lartë. Sidoqoftë, drejtues të tillë mbështesin vetëm mënyrat hap dhe gjysmë hapi.
3) Drejtues me PWM.
Aktualisht, drejtuesit e motorëve stepper PWM janë më të njohurit pothuajse të gjithë drejtuesit në treg. Këta drejtues furnizojnë një sinjal PWM të tensionit shumë të lartë në mbështjelljen e motorit stepper, i cili ndërpritet kur rryma arrin nivelin e kërkuar. Vlera aktuale në të cilën ndodh ndërprerja vendoset ose nga një potenciometër ose një ndërprerës DIP nganjëherë kjo vlerë programohet duke përdorur softuer të veçantë. Këta shoferë janë mjaft inteligjentë dhe vijnë me një shumëllojshmëri të funksione shtesë, mbështesin ndarje të ndryshme hapash, gjë që ju lejon të rritni pozicionimin diskret dhe butësinë e lëvizjes. Sidoqoftë, drejtuesit PWM janë gjithashtu shumë të ndryshëm nga njëri-tjetri. Përveç karakteristikave të tilla si tensioni i furnizimit dhe rryma maksimale e mbështjelljes, ato kanë një frekuencë të ndryshme PWM. Është më mirë nëse frekuenca e shoferit është më shumë se 20 kHz, dhe në përgjithësi, sa më e lartë të jetë, aq më mirë. Frekuencat nën 20 kHz përkeqësohen performanca e drejtimit motorët dhe bie në diapazonin e dëgjueshëm, motorët stepper fillojnë të lëshojnë një kërcitje të pakëndshme. Drejtuesit e motorëve stepper, duke ndjekur vetë motorët, ndahen në njëpolar dhe bipolar. Ndërtuesit fillestarë të mjeteve të makinerisë këshillohen fuqimisht të mos eksperimentojnë me disqet, por të zgjedhin ato për të cilat mund të marrin sasinë maksimale të mbështetjes teknike, informacionit dhe për të cilat produktet përfaqësohen më gjerësisht në treg. Këta janë drejtuesit e motorëve bipolarë hibridë stepper.
Si të zgjidhni një drejtues motori stepper (SM)
Parametri i parë Diçka që ia vlen t'i kushtohet vëmendje kur vendosni të zgjidhni një drejtues motori stepper është sasia e rrymës që shoferi mund të sigurojë. Si rregull, ai rregullohet brenda një gamë mjaft të gjerë, por drejtuesi duhet të zgjidhet ai që mund të prodhojë një rrymë të barabartë me rrymën e fazës së motorit hapësor të zgjedhur. Është e dëshirueshme, natyrisht, që rryma maksimale e drejtuesit të jetë 15-40% më e lartë. Nga njëra anë, kjo do të sigurojë një rezervë në rast se dëshironi të merrni më shumë çift rrotullues nga motori, ose në të ardhmen do të instaloni më shumë motor i fuqishëm, nga ana tjetër, nuk do të jetë e tepruar: prodhuesit ndonjëherë "rregullojnë" vlerësimet e komponentëve radio-elektronikë në një lloj/madhësi të caktuar motorësh, kështu që një shofer tepër i fuqishëm 8 A që drejton një motor NEMA 17 (42 mm) mund të , për shembull, shkaktojnë dridhje të panevojshme.
Pika e dytëështë tensioni i furnizimit. Një parametër shumë i rëndësishëm dhe i paqartë. Ndikimi i tij është mjaft i shumëanshëm - voltazhi i furnizimit ndikon në dinamikën (çift rrotullues shpejtësi e lartë), vibrimi, ngrohja e motorit dhe drejtuesit. Zakonisht tensioni maksimal i furnizimit të drejtuesit është afërsisht rryma maksimale Unë e shumëzova me 8-10. Nëse voltazhi maksimal i specifikuar i furnizimit të drejtuesit ndryshon ndjeshëm nga këto vlera, ia vlen të pyesni më tej se cila është arsyeja e një ndryshimi të tillë. Sa më i madh të jetë induktiviteti i motorit, aq më i madh është voltazhi i kërkuar për drejtuesin. Ekziston një formulë empirike U = 32 * sqrt(L), ku L është induktiviteti i mbështjelljes së motorit stepper. Vlera e U e marrë nga kjo formulë është shumë e përafërt, por ju lejon të lundroni kur zgjidhni një drejtues: U duhet të jetë afërsisht i barabartë me vlerën maksimale të tensionit të furnizimit të drejtuesit. Nëse merrni U të barabartë me 70, atëherë drejtuesit EM706, AM882, YKC2608M-H e kalojnë këtë kriter.
Aspekti i tretë– prania e inputeve opto-izoluar. Pothuajse në të gjithë drejtuesit dhe kontrollorët e prodhuar në fabrika, veçanërisht ato të markës, kërkohet një lidhje optike, sepse drejtuesi është një pajisje elektronike e energjisë, dhe prishja e çelësit mund të çojë në një impuls të fuqishëm në kabllot përmes të cilit furnizohen sinjalet e kontrollit dhe djegien. e një kontrolluesi të shtrenjtë CNC. Sidoqoftë, nëse vendosni të zgjidhni një drejtues SD të një modeli të panjohur, duhet të pyesni gjithashtu për praninë e izolimit opto të hyrjeve dhe daljeve.
Aspekti i katërt– prania e mekanizmave të shtypjes së rezonancës. Rezonanca e një motori stepper është një fenomen që shfaqet gjithmonë, ndryshimi është vetëm në frekuencën rezonante, e cila kryesisht varet nga momenti i inercisë së ngarkesës, voltazhi i furnizimit të drejtuesit dhe; fuqi e vendosur rryma e fazës së motorit. Kur ndodh rezonanca, motori stepper fillon të dridhet dhe të humbasë çift rrotullues, derisa boshti të ndalojë plotësisht. Për të shtypur rezonancën, përdoren algoritmet e kompensimit të rezonancës me mikrostepping dhe të integruar. Rotori i një motori stepper që lëkundet në rezonancë gjeneron mikro-lëkundje të emf-së së induktuar në mbështjellje, dhe nga natyra dhe amplituda e tyre drejtuesi përcakton nëse ka rezonancë dhe sa e fortë është. Në varësi të të dhënave të marra, shoferi i zhvendos pak hapat e motorit në kohë në lidhje me njëri-tjetrin - një pabarazi e tillë artificiale e nivelon rezonancën. Një mekanizëm i shtypjes së rezonancës është ndërtuar në të gjithë drejtuesit e serive Leadshine DM, AM dhe EM. Drejtuesit me shtypjen e rezonancës janë drejtues me cilësi të lartë dhe nëse buxheti juaj e lejon, është më mirë t'i blini këto. Sidoqoftë, edhe pa këtë mekanizëm, drejtuesi mbetet një pajisje plotësisht funksionale - pjesa më e madhe e drejtuesve të shitur - pa kompensim rezonance, dhe megjithatë dhjetëra mijëra makina funksionojnë pa probleme në mbarë botën dhe kryejnë me sukses detyrat e tyre.
Aspekti i pestë– pjesa protokollare. Duhet të siguroheni që drejtuesi të funksionojë në protokollin që ju nevojitet dhe që nivelet e sinjalit të hyrjes të jenë në përputhje me nivelet logjike që kërkoni. Ky kontroll është pika e pestë, sepse me përjashtime të rralla, shumica dërrmuese e drejtuesve punojnë duke përdorur protokollin STEP/DIR/ENABLE dhe janë të pajtueshëm me nivelet e sinjalit prej 0..5 V, thjesht duhet të siguroheni, për çdo rast.
Aspekti i gjashtë– prania e funksioneve mbrojtëse. Këto përfshijnë mbrojtjen kundër tensionit të tepërt të furnizimit, rrymës së mbështjelljes (përfshirë qarkun e shkurtër të mbështjelljes), ndryshimin e tensionit të furnizimit dhe lidhjen e gabuar të fazave të motorit stepper. Sa më shumë funksione të tilla, aq më mirë.
Aspekti i shtatë– prania e mënyrave të mikroshkallëzimit. Tani pothuajse çdo shofer ka shumë mënyra mikrostepping. Sidoqoftë, ka përjashtime nga çdo rregull, dhe në drejtuesit e Geckodrive ekziston vetëm një mënyrë - ndarjet 1/10 hapash. Kjo është e motivuar nga fakti se ndarjet më të mëdha nuk sjellin saktësi më të madhe, që do të thotë se ato nuk janë të nevojshme. Sidoqoftë, praktika tregon se mikroshkapa është e dobishme jo fare duke rritur diskretin e pozicionimit ose saktësinë, por nga fakti që sa më i madh të jetë ndarja e hapit, aq më e qetë është lëvizja e boshtit të motorit dhe aq më pak rezonancë. Prandaj, duke qenë të gjitha gjërat e tjera të barabarta, ia vlen të përdorni ndarjen, aq më mirë. Ndarja maksimale e lejuar e hapave do të përcaktohet jo vetëm nga tabelat Bradis të integruara në drejtues, por edhe nga frekuenca maksimale e sinjaleve hyrëse - për shembull, për një drejtues me një frekuencë hyrëse prej 100 kHz nuk ka kuptim të përdoret një ndarja e 1/256, pasi shpejtësia e rrotullimit do të kufizohet në 100,000 / (200 * 256) * 60 = 117 rpm, që është shumë e ulët për një motor stepper. Përveç kësaj, një kompjuter personal do të ketë gjithashtu vështirësi në gjenerimin e sinjaleve me një frekuencë prej më shumë se 100 kHz. Nëse nuk planifikoni të përdorni një kontrollues harduerësh CNC, atëherë 100 kHz ka shumë të ngjarë të jetë tavani juaj, i cili korrespondon me një ndarje prej 1/32.
Aspekti i tetë– disponueshmëria e funksioneve shtesë. Mund të ketë shumë prej tyre, për shembull, funksioni i zbulimit të "dështimit" - ndalesë e papritur boshti në rast bllokimi ose mungesa e çift rrotullues në motorin stepper, daljet për treguesin e gabimit të jashtëm, etj. Të gjitha ato nuk janë të nevojshme, por mund ta bëjnë jetën shumë më të lehtë kur ndërtoni një makinë.
E nënta dhe shumica aspekt i rëndësishëm - cilësia e shoferit. Praktikisht nuk ka të bëjë me karakteristikat, etj. Ka shumë oferta në treg, dhe nganjëherë karakteristikat e drejtuesve të dy prodhuesve përkojnë pothuajse në një pikë, dhe pasi t'i instaloni ato një nga një në makinë, bëhet e qartë se një nga prodhuesit nuk po e bën qartë punën e tij, dhe do të ketë fat më të mirë në prodhimin e hekurave të lira. Është mjaft e vështirë për një fillestar të përcaktojë paraprakisht nivelin e shoferit bazuar në disa të dhëna indirekte. Mund të përpiqeni të përqendroheni në numrin e funksioneve inteligjente, të tilla si "zbulimi i ngecjes" ose shtypja e rezonancës, dhe gjithashtu të përdorni një metodë të provuar - fokusohuni te markat.
Motorët stepper janë interesantë sepse ju lejojnë të rrotulloni boshtin në një kënd të caktuar. Prandaj, me ndihmën e tyre mund ta rrotulloni boshtin me një numër të caktuar rrotullimesh, sepse rrotullimet N është gjithashtu një kënd i caktuar i barabartë me 360 * N, dhe, ndër të tjera, nga një numër jo i plotë rrotullimesh, për shembull, nga 0,75 rrotullime, 2,5 rrotullime, 3,7 xhiro, etj. Këto aftësi të motorëve stepper përcaktojnë fushën e tyre të aplikimit. Ato përdoren kryesisht për pozicionim pajisje të ndryshme: kokat e leximit në disqet e diskut, kokat e printimit në printera dhe plotterë, etj.
Natyrisht, amatorët e radios nuk mund të injoronin mundësi të tilla. Ata përdorin me sukses steppers në dizajne robotë të bërë vetë, makineri CNC shtepiake etj. Më poshtë janë rezultatet e eksperimenteve të mia me një motor stepper, shpresoj se kjo mund të jetë e dobishme për dikë.
Pra, çfarë na duhet për eksperimente. Së pari, motori stepper. Mora një stepper bipolar kinez 5 volt me një emër misterioz, të grisur nga një disk i vjetër 3,5", një analog i M20SP-GW15. Së dyti, pasi mbështjelljet e motorit konsumojnë rrymë të konsiderueshme (në në këtë rast deri në 300 mA), atëherë është mjaft e qartë se nuk do të jetë e mundur të lidhni hapësin direkt me kontrolluesin;
Si drejtues për motorët hapësorë bipolarë, zakonisht përdoret një qark i ashtuquajtur i urës H ose një mikroqark i veçantë (i cili ende ka një urë H të integruar). Sigurisht, ju mund ta skalitni vetë, por unë mora një mikruh të gatshëm (LB1838) nga i njëjti disk i vjetër. Në fakt, përveç gjithçkaje të përshkruar më sipër, për eksperimentet tona do të na duhen gjithashtu: një kontrollues PIC (PIC12F629 u mor si më i liri) dhe disa butona.
Para se të kalojmë drejtpërdrejt në diagram, le të kuptojmë pak teorinë.
Një motor bipolar stepper ka dy mbështjellje dhe, në përputhje me rrethanat, është i lidhur me katër tela. Ju mund t'i gjeni skajet e dredha-dredha thjesht duke kumbuar - skajet e telave që i përkasin të njëjtës dredha-dredha do të tingëllojnë me njëri-tjetrin, por skajet që i përkasin mbështjelljeve të ndryshme jo. Skajet e mbështjelljes së parë do t'i shënojmë me shkronjat "a", "b", dhe skajet e mbështjelljes së dytë me shkronjat "c", "d".
Mostra në fjalë ka shenja dixhitale të kontakteve pranë motorit dhe kodimi me ngjyra telat (Zoti e di, mbase ky është gjithashtu një lloj standardi): 1 - e kuqe, 2 - blu - dredha-dredha e parë; 3 - e verdhë, 4 - e bardhë - dredha-dredha e dytë.
Në mënyrë që një motor bipolar stepper të rrotullohet, është e nevojshme të aktivizoni mbështjelljet në rendin e treguar në tabelë. Nëse drejtimi i kalimit të tabelës zgjidhet nga lart poshtë në një rreth, atëherë motori do të rrotullohet përpara, nëse nga poshtë lart në një rreth, motori do të rrotullohet prapa:
Gjatë një cikli të plotë, motori bën katër hapa.
Për funksionimin e duhur, sekuenca e ndërrimit të treguar në tabelë duhet të respektohet rreptësisht. Kjo do të thotë, për shembull, pas kombinimit të dytë (kur kemi aplikuar + në pinin "c" dhe minus në pin "d"), ne mund të aplikojmë ose kombinimin e tretë (fikni mbështjelljen e dytë dhe në të parën aplikoni për "a" dhe + në "b"), atëherë motori do të kthehet një hap përpara, ose kombinimi i parë (motori do të kthehet një hap prapa).
Kombinimi me të cilin duhet të filloni të rrotulloheni përcaktohet nga kombinimi i fundit që i është dhënë motorit para se të fiket (përveç nëse, sigurisht, e keni kthyer më pas me dorë) dhe drejtimi i dëshiruar i rrotullimit.
Kjo do të thotë, le të themi se e kthyem motorin 5 hapa përpara, duke i dhënë kombinimet 2-3-4-1-2, më pas fikëm energjinë dhe më pas donim ta kthenim një hap tjetër përpara. Për ta bërë këtë, ne duhet të aplikojmë kombinimin 3 në mbështjellje. Dhe kështu me radhë në të njëjtën frymë.
Kjo tabelë, ndër të tjera, na lejon të vlerësojmë se çfarë do të ndodhë me motorin stepper nëse ngatërrojmë rendin e lidhjes së mbështjelljeve ose skajeve në mbështjellje.
Me këtë do të përfundojmë me motorin dhe do të kalojmë te drejtuesi LB1838.
Kjo pajisje e vogël ka katër këmbë kontrolli (IN1, IN2, EN1, EN2), tek të cilat do të dërgojmë sinjale nga kontrolluesi dhe katër këmbët e daljes (Out1, Out2, Out3, Out4), me të cilat lidhen mbështjelljet e motorit. Mbështjelljet janë të lidhura si më poshtë: teli "a" është i lidhur me Out1, teli "b" është i lidhur me Out2, teli "c" është i lidhur me Out3, teli "d" është i lidhur me Out4.
Më poshtë është tabela e së vërtetës për çipin drejtues (gjendja e daljeve në varësi të gjendjes së hyrjeve):
| IN1 | EN1 | Jashtë 1 (a) | Jashtë 2(b) | IN2 | EN2 | Jashtë 3(c) | Jashtë 4(d) |
| E ulët | Lartë | + | — | E ulët | Lartë | + | — |
| Lartë | Lartë | — | + | Lartë | Lartë | — | + |
| X | E ulët | fikur | fikur | X | E ulët | fikur | fikur |
Tani le të vizatojmë në diagram se çfarë forme duhet të kenë sinjalet IN1, EN1, IN2, EN2 për një cikli i plotë rrotullimi (4 hapa), d.m.th. në mënyrë që të 4 kombinimet e lidhjeve të mbështjelljes të shfaqen në mënyrë sekuenciale në daljet:

Nëse shikoni nga afër këtë diagram (majtas), bëhet e qartë se sinjalet IN1 dhe IN2 mund të bëhen saktësisht të njëjta, domethënë, i njëjti sinjal mund të aplikohet në të dyja këto këmbë. Në këtë rast, diagrami ynë do të duket si ky:

Pra, diagrami i fundit tregon se cilat kombinime të niveleve të sinjalit duhet të jenë në hyrjet e kontrollit të drejtuesit (EN1, EN2, IN1, IN2) për të marrë kombinimet e duhura të lidhjes së mbështjelljeve të motorit, dhe shigjetat tregojnë gjithashtu rendin e ndryshimit të tyre kombinime për të siguruar rrotullimin në anën e dëshiruar.
Kjo është në thelb e gjithë teoria. Kombinimet e nevojshme të niveleve në hyrjet e kontrollit gjenerohen nga kontrolluesi (ne do të përdorim PIC12F629).
Skema:
Pajisja e gatshme:


Programi i kontrollit zbaton algoritmin e mëposhtëm: kur shtypni butonin KH1, motori kthehet një hap në një drejtim dhe kur shtypni butonin KH2, ai kthehet një hap në drejtimin tjetër.
Në fakt, mund ta vidhosni këtu dhe të zbatoni kontrollin nga një kompjuter (shpejtësia e transmetimit, numri i hapave dhe drejtimi i rrotullimit nga kompjuteri).



