පරිපාලක
18702
CAN බස් රථයේ ක්රියාකාරිත්වයේ මූලධර්ම අවබෝධ කර ගැනීම සඳහා, විදේශීය මූලාශ්රවලින් ලැබෙන ද්රව්ය මත පදනම්ව සුපුරුදු පරිදි මෙම මාතෘකාව පිළිබඳ ලිපි ගණනාවක් ලිවීමට / පරිවර්තනය කිරීමට අපි තීරණය කළෙමු.
මෙම ප්රභවයන්ගෙන් එකක්, අපට පෙනෙන පරිදි, CAN බස් රථයේ මූලධර්ම ඉතා යෝග්ය ලෙස නිරූපණය කරයි, Igendi Engineering (http://canbasic.com) හි අධ්යාපනික නිෂ්පාදනයක් වන CANBASIC හි වීඩියෝ ඉදිරිපත් කිරීමකි.
CAN බස් රථයේ ක්රියාකාරීත්වය සඳහා කැප වූ පුහුණු පද්ධතියක් (පුවරුවක්) නව CANBASIC නිෂ්පාදනය ඉදිරිපත් කිරීමට සාදරයෙන් පිළිගනිමු.
අපි CAN බස් ජාලයක් ගොඩනැගීමේ මූලික කරුණු සමඟ ආරම්භ කරමු. රූප සටහනේ දැක්වෙන්නේ එහි ආලෝක පද්ධතිය සහිත මෝටර් රථයකි.

සෑම බල්බයක්ම යම් ස්විචයකට හෝ තිරිංග පැඩල් ස්පර්ශයකට සෘජුවම සම්බන්ධ කර ඇති සාමාන්ය රැහැන්වීමක් පෙන්වයි.

දැන් CAN බස් තාක්ෂණය භාවිතයෙන් සමාන ක්රියාකාරිත්වය පෙන්වයි. ඉදිරිපස සහ පසුපස ආලෝක උපකරණපාලන මොඩියුලවලට සම්බන්ධ කර ඇත. පාලක මොඩියුල එකම බස් වයර් සමඟ සමාන්තරව සම්බන්ධ වේ.

මෙය කුඩා උදාහරණයක්විදුලි රැහැන් පරිමාව අඩු වී ඇති බව පෙන්නුම් කරයි. මීට අමතරව, පාලක මොඩියුල මගින් පිළිස්සුණු ලාම්පු හඳුනාගෙන ඒ පිළිබඳව රියදුරුට දැනුම් දිය හැකිය.
පෙන්වා ඇති දර්ශනයේ ඇති මෝටර් රථයේ පාලන මොඩියුල හතරක් අඩංගු වන අතර CANBASIC පුහුණු පද්ධතිය (පුවරුව) ඉදිකිරීම පැහැදිලිව පිළිබිඹු කරයි.

ඉහතින් දැක්වෙන්නේ බස් නෝඩ් (CAN nodes) හතරකි.
ඉදිරිපස මොඩියුලය ඉදිරිපස ආලෝකය පාලනය කරයි.
අනතුරු ඇඟවීමේ ඒකකය වාහනයේ අභ්යන්තරයේ පාලනය සපයයි.
ප්රධාන පාලන මොඩියුලය රෝග විනිශ්චය සඳහා සියලුම වාහන පද්ධති සම්බන්ධ කරයි.
පසුපස එකලස් කිරීම පසුපස ආලෝකය පාලනය කරයි.
CANBASIC පුහුණු පුවරුවේ ඔබට සංඥා තුනක මාර්ගගත කිරීම (ස්ථානය) දැකිය හැකිය: "පවර්", "CAN-Hi" සහ "භූමිය", පාලක මොඩියුලය තුළ සම්බන්ධ කිරීම.

බහුතරය තුළ වාහනරෝග විනිශ්චය මෘදුකාංග භාවිතයෙන් ප්රධාන පාලන මොඩියුලය පරිගණකයකට සම්බන්ධ කිරීමට, ඔබට OBD-USB පරිවර්තකයක් අවශ්ය වේ.

CANBASIC පුවරුවේ දැනටමත් OBD-USB පරිවර්තකයක් අඩංගු වන අතර එය කෙලින්ම පරිගණකයකට සම්බන්ධ කළ හැක.
පුවරුව USB අතුරුමුහුණතකින් බල ගැන්වේ, එබැවින් අමතර කේබල් අවශ්ය නොවේ.

විවිධ දත්ත සම්ප්රේෂණය කිරීමට බස් වයර් භාවිතා කරයි. එය ක්රියා කරන්නේ කෙසේද?
CAN බස් රථය ක්රියා කරන්නේ කෙසේද?
මෙම දත්ත අනුක්රමිකව සම්ප්රේෂණය වේ. මෙන්න උදාහරණයක්.
පහන සහිත මිනිසා, සම්ප්රේෂකය, දුරේක්ෂය, ග්රාහකයා (ග්රාහකයා) සමඟ මිනිසා වෙත යම් තොරතුරු යැවීමට අවශ්ය වේ. ඔහුට දත්ත මාරු කිරීමට අවශ්යයි.

මෙය සිදු කිරීම සඳහා, ලබන්නා සෑම තත්පර 10 කට වරක් ලාම්පුවේ තත්ත්වය පරීක්ෂා කරන බවට ඔවුන් එකඟ විය.

එය මෙසේ පෙනේ:



තත්පර 80 කට පසු:

දැන් තත්පරයට බිටු 0.1 බැගින් (එනම් සෑම තත්පර 10කටම බිට් 1 බැගින්) දත්ත බිටු 8ක් මාරු කර ඇත. මෙය අනුක්රමික දත්ත සම්ප්රේෂණය ලෙස හැඳින්වේ.

මෙම ප්රවේශය භාවිතා කිරීමට කාර් යෙදුමකාල පරතරය තත්පර 10 සිට තත්පර 0.000006 දක්වා අඩු වේ. දත්ත බසයේ වෝල්ටීයතා මට්ටම වෙනස් කිරීමෙන් තොරතුරු සම්ප්රේෂණය කිරීමට.

CAN බසයේ විද්යුත් සංඥා මැනීමට oscilloscope භාවිතා කරයි. CANBASIC පුවරුවේ ඇති මිනුම් පෑඩ් දෙකක් ඔබට මෙම සංඥාව මැනීමට ඉඩ සලසයි.

සම්පූර්ණ CAN පණිවිඩය පෙන්වීමට, oscilloscope විභේදනය අඩු වේ.

එහි ප්රතිඵලයක් වශයෙන්, තනි CAN බිටු තවදුරටත් හඳුනා ගත නොහැක. මෙම ගැටළුව විසඳීම සඳහා, CANBASIC මොඩියුලය ඩිජිටල් ගබඩා oscilloscope වලින් සමන්විත වේ.
අපි CANBASIC මොඩියුලය නොමිලේ USB සම්බන්ධකයකට ඇතුළු කරන්නෙමු, ඉන්පසු එය ස්වයංක්රීයව අනාවරණය වේ. මෘදුකාංග CANBASIC දැන් ආරම්භ කළ හැක.
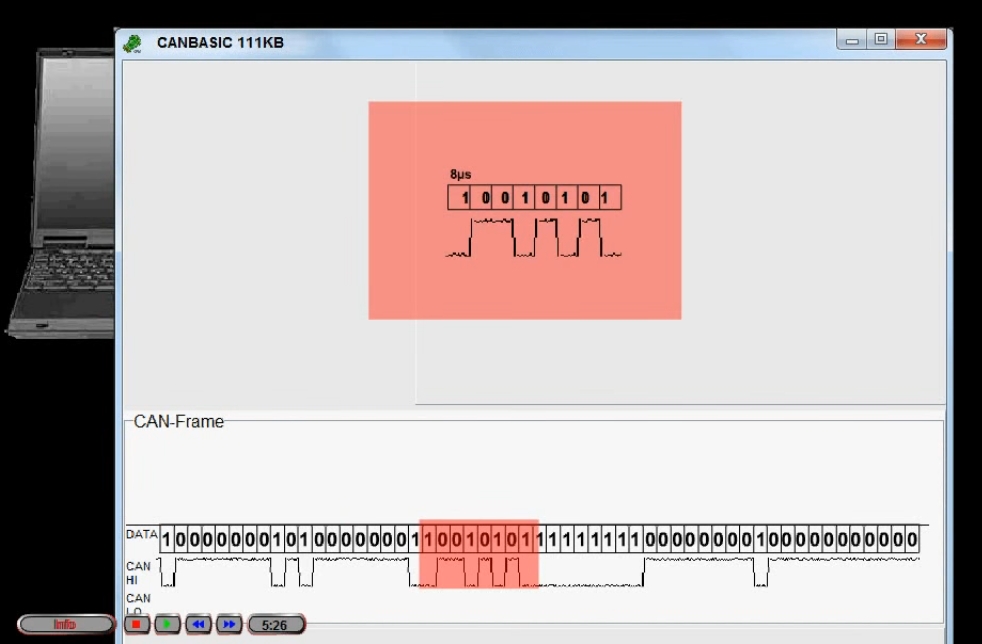
අමුණා ඇති බිට් අගයන් සමඟ ඔබට මෘදුකාංග oscilloscope දර්ශනය දැකිය හැකිය. රතු පෙර උදාහරණයේ මාරු කළ දත්ත පෙන්වයි.
CAN පණිවිඩයේ අනෙකුත් කොටස් පැහැදිලි කිරීම සඳහා, අපි CAN රාමුව වර්ණවත් කර එයට විස්තර අමුණන්නෙමු.

CAN පණිවිඩයේ සෑම වර්ණවත් කොටසක්ම එකම වර්ණයෙන් යුත් ආදාන ක්ෂේත්රයකට අනුරූප වේ. රතු පැහැයෙන් සලකුණු කර ඇති ප්රදේශයේ පරිශීලක දත්ත තොරතුරු අඩංගු වේ, ඒවා බිටු, නිබල් හෝ ෂඩ් දශම ආකෘතියෙන් දැක්විය හැක.
කහ ප්රදේශය පරිශීලක දත්ත ප්රමාණය තීරණය කරයි. හරිත කලාපයේ අද්විතීය හඳුනාගැනීමක් සැකසිය හැක.
දුරස්ථ ඉල්ලීම සඳහා CAN පණිවිඩය සැකසීමට නිල් ප්රදේශය ඔබට ඉඩ සලසයි. මෙයින් අදහස් වන්නේ වෙනත් CAN නෝඩයකින් ප්රතිචාරයක් අපේක්ෂා කරන බවයි. (පද්ධති සංවර්ධකයින් විසින්ම පද්ධති දෝෂ වලට තුඩු දෙන හේතු ගණනාවක් සඳහා දුරස්ථ ඉල්ලීම් භාවිතා නොකිරීමට නිර්දේශ කරයි, නමුත් එය වෙනත් ලිපියකින් සාකච්ඡා කෙරේ.)
බොහෝ CAN බස් පද්ධති දත්ත සම්ප්රේෂණය සඳහා දෙවන CAN-LO නාලිකාවක් මගින් මැදිහත් වීමෙන් ආරක්ෂා කර ඇත, එය CAN-HI සංඥාවට සාපේක්ෂව ප්රතිලෝම වේ (එනම්, එම සංඥාව යවනු ලබන්නේ ප්රතිවිරුද්ධ ලකුණ සමඟ පමණි).

එකම මට්ටමක් සහිත අඛණ්ඩ බිටු හයක් CAN රාමුවේ අවසානය නිර්වචනය කරයි.

අහඹු ලෙස, CAN රාමුවේ අනෙකුත් කොටස්වල එකම මට්ටමක් සහිත අඛණ්ඩ බිටු පහකට වඩා අඩංගු විය හැක.

මෙම බිටු සලකුණ වළක්වා ගැනීම සඳහා, එකම මට්ටමේ අඛණ්ඩ බිටු පහක් දිස්වන්නේ නම්, CAN රාමුවේ අවසානයේ ප්රතිවිරුද්ධ බිටු ඇතුල් කරනු ලැබේ. මෙම බිටු කාර්ය මණ්ඩල බිටු (කසළ බිටු) ලෙස හැඳින්වේ. CAN ග්රාහක (සංඥා ග්රාහක) මෙම බිටු නොසලකා හරින්න.

ආදාන ක්ෂේත්ර භාවිතා කරමින්, CAN රාමුවක සියලුම දත්ත නියම කළ හැකි අතර එම නිසා සෑම CAN පණිවිඩයක්ම යැවිය හැක.
ඇතුළත් කළ දත්ත වහාම CAN රාමුව තුළ යාවත්කාලීන වේ, මෙම උදාහරණයේදී දත්ත දිග බයිට් එකක සිට බයිට් 8 දක්වා වෙනස් කර එක් බයිටයකින් ආපසු මාරු කරනු ලැබේ.

"2C1" හැඳුනුම්පත සහ දත්ත බිටු 0 සහ 1 භාවිතයෙන් හැරවුම් සංඥාව පාලනය වන බව විස්තර පෙළ පෙන්නුම් කරයි. සියලුම දත්ත බිටු 0 වෙත යළි පිහිටුවනු ලැබේ.

හඳුනාගැනීම ""2С1" අගයට සකසා ඇත. හැරවුම් සංඥාව සක්රිය කිරීමට, දත්ත බිට් 0 සිට 1 දක්වා සැකසිය යුතුය.

අභ්යන්තර මාදිලියේදී, ඔබට සරල මූසික ක්ලික් කිරීම් සමඟ සම්පූර්ණ මොඩියුලය පාලනය කළ හැකිය. CAN දත්ත අපේක්ෂිත ක්රියාව අනුව ස්වයංක්රීයව සකසා ඇත.
හැරවුම් සංඥා ලාම්පු DRL ලෙස ක්රියා කිරීම සඳහා අඩු කදම්භයකට සැකසිය හැක. දීප්තිය පාලනය කරනු ඇත ස්පන්දන පළල මොඩියුලේෂන්(PWM), නවීන ඩයෝඩ තාක්ෂණයේ හැකියාවන්ට අනුකූලව.
දැන් අපට අඩු කදම්භ හෙඩ් ලයිට් සක්රිය කළ හැකිය, මීදුම ලයිට්, තිරිංග ආලෝකය සහ රියදුරු ආලෝකය.

ලෝ කදම්භය නිවා දැමූ විට, මීදුම ලයිට් ද නිවා දමයි. CANBASIC ආලෝකකරණ පද්ධතියේ පාලන තර්කනය මෝටර් රථවලට ගැලපේ Volkswagen සන්නාමය. ජ්වලන සහ "ආපසු ගෙදර" විශේෂාංග ද ඇතුළත් වේ.
සංඥා නෝඩයක් සමඟින්, ආරම්භක දුරස්ථ ඉල්ලීමකින් පසු ඔබට සංවේදක සංඥා කියවිය හැක.
දුරස්ථ ඉල්ලීම් මාදිලියේදී, දෙවන CAN රාමුව ලැබෙනු ඇති අතර යවන ලද CAN රාමුවට පහළින් පෙන්වනු ඇත.

CAN දත්ත බයිටයේ දැන් සංවේදක මිනුම් ප්රතිඵලය අඩංගු වේ. ඔබ ඔබේ ඇඟිල්ල සංවේදකයට සමීප වන විට, ඔබට මනින ලද අගය වෙනස් කළ හැකිය.

විරාම යතුර වත්මන් CAN රාමුව කැටි කරන අතර නිවැරදි විශ්ලේෂණයට ඉඩ දෙයි.
දැනටමත් පෙන්වා දී ඇති පරිදි, CAN රාමුවේ විවිධ කොටස් සැඟවිය හැක.

ඊට අමතරව, CAN රාමුව තුළ එක් එක් බිට් සැඟවීමට සහය දක්වයි.
අභ්යාස පත්රිකාවක් වැනි ඔබේම ලේඛනවල CAN රාමු නිරූපණය භාවිතා කිරීමට ඔබට අවශ්ය නම් මෙය ඉතා ප්රයෝජනවත් වේ.
රෝග විනිශ්චය සහ අලුත්වැඩියා: CAN බස්
21.02.2006
එම "ටයරය" හරියටම පෙනෙන්නේ මෙයයි (බොහෝ විට) CAN ", අපට මෑතකදී වැඩි වැඩියෙන් කටයුතු කිරීමට සිදු විය:
ඡායාරූපය 1
මෙය Twisted Pair නම් සාමාන්ය වයර් දෙකේ කේබලයකි .
ඡායාරූපය 1 වයර් පෙන්වයි CAN ඉහළසහ CAN අඩුයි බලශක්ති ඒකකය.
මෙම වයර් පාලන ඒකක අතර දත්ත හුවමාරුව සිදු කරයි; දොඹකරය, ජ්වලන කාලය සහ එසේ ය.
එක් වයරයක් අතිරේකව කළු තීරුවකින් සලකුණු කර ඇති බව කරුණාවෙන් සලකන්න. වයරය සලකුණු කර දෘශ්ය ලෙස හඳුනා ගන්නේ එලෙස ය CAN ඉහළ (තැඹිලි-කළු).
වයර් වර්ණය CAN-අඩු - තැඹිලි-දුඹුරු.
ටයරයේ ප්රධාන වර්ණය සඳහා CAN තැඹිලි වර්ණය පිළිගනු ලැබේ.
පින්තූර සහ චිත්රවල බස් වයර්වල වර්ණ නිරූපණය කිරීම සිරිතකි CAN වෙනත් වර්ණ, එනම්:

ඡායාරූපය 2
CAN-ඉහළ - කහ
CAN-අඩු - කොළ
ටයර් වර්ග කිහිපයක් තිබේ CAN , ඔවුන් ඉටු කරන කාර්යයන් අනුව තීරණය වේ:
Powertrain CAN බස්(වේගවත් නාලිකාව) .
ඇය ඉඩ දෙයි 500 kbit/s වේගයකින් තොරතුරු සම්ප්රේෂණය කරන අතර පාලන ඒකක අතර සන්නිවේදනය සඳහා භාවිතා වේ (එන්ජිම සම්ප්රේෂණය)
සුවපහසුව CAN බසය(මන්දගාමී නාලිකාව) .
ඇය ඉඩ දෙයි 100 kbit/s වේගයකින් තොරතුරු සම්ප්රේෂණය කරන අතර Comfort පද්ධතියට ඇතුළත් කර ඇති පාලන ඒකක අතර සන්නිවේදනය සඳහා භාවිතා වේ.
තොරතුරු සහ විධාන පද්ධතිය CAN දත්ත බසය(මන්දගාමී නාලිකාව), 100 kBit/s වේගයකින් දත්ත සම්ප්රේෂණයට ඉඩ සලසයි. සන්නිවේදනය සපයයිවිවිධ සේවා පද්ධති අතර (උදාහරණයක් ලෙස, දුරකථන සහ නාවික පද්ධති).
නව මෝටර් රථ ආකෘති වැඩි වැඩියෙන් ගුවන් යානා මෙන් වෙමින් පවතී - ආරක්ෂාව, සුවපහසුව සහ පරිසර හිතකාමීත්වය සඳහා ප්රකාශිත කාර්යයන් ගණන අනුව. වැඩි වැඩියෙන් පාලන ඒකක පවතින අතර එක් එක් වයර් පොකුරකින් "අදින්න" යථාර්ථවාදී නොවේ.
එබැවින්, ටයරයට අමතරව CAN දැනටමත් වෙනත් ටයර් තිබේ:
- LIN බස් (තනි රැහැන් බස්)
- බොහෝ බස් (ෆයිබර් ඔප්ටික් බස්)
- බ්ලූටූත් රැහැන් රහිත බස්
නමුත් අපි “අපේ සිතුවිලි ගස දිගේ ඇවිද නොයමු”, අපි දැන් අපගේ අවධානය එක් නිශ්චිත ටයරයක් වෙත යොමු කරමු: CAN (සංස්ථා අදහස් අනුව BOSCH).
උදාහරණයක් ලෙස CAN බස් රථය භාවිතා කිරීම බල ඒකකය, ඔබට සංඥා හැඩය නැරඹිය හැකිය:

ඡායාරූපය 3
High CAN බස් එකේ යනකොට ප්රමුඛ තත්වය, වයර් මත වෝල්ටීයතාව වෝල්ට් 3.5 දක්වා ඉහළ යයි.
අවපාත තත්වයේදී, වයර් දෙකෙහිම වෝල්ටීයතාව වෝල්ට් 2.5 කි.
රේඛාවේ සිටින විටඅඩු ප්රමුඛ තත්වය, වෝල්ටීයතාව වෝල්ට් 1.5 දක්වා පහත වැටේ.
("ආධිපත්යය" යනු ශබ්දකෝෂ වලින් ඕනෑම ප්රදේශයක ආධිපත්යය දරන, ආධිපත්යය දරන හෝ ආධිපත්යය දරන සංසිද්ධියකි).
දත්ත සම්ප්රේෂණයේ විශ්වසනීයත්වය වැඩි කිරීම සඳහා, බසය CAN වයර් දෙකක් හරහා සංඥා සම්ප්රේෂණය කිරීමේ අවකල ක්රමයක් ලෙස හැඳින්වේවිකෘති යුගල . තවද මෙම යුගලය සාදන වයර් කැඳවනු ලැබේ CAN ඉහළ සහ අඩු CAN .
බසයේ ආරම්භක තත්වයේදී, වයර් දෙකම ආධාරක වේ නිරන්තර පීඩනයයම් (මූලික) මට්ටමකින්. ටයර් සඳහා CAN බල ඒකකය එය ආසන්න වශයෙන් වෝල්ට් 2.5 කි.
මෙම ආරම්භක තත්වය "විවේක තත්වයක්" හෝ "අවපාත තත්වයක්" ලෙස හැඳින්වේ.
සංඥා සම්ප්රේෂණය සහ පරිවර්තනය කරන්නේ කෙසේද? CAN බසයක්ද?
එක් එක් පාලන ඒකක සම්බන්ධ වේ CAN සංඥා ආදානයේ ස්ථාපනය කර ඇති අවකල ඇම්ප්ලිෆයර් වන සංඥා ග්රාහකයක් ඇති ට්රාන්ස්සීවර් නම් වෙනම උපාංගයක් හරහා බස්රථය:

ඡායාරූපය 4
කම්බි වලින් එනවාඉහළ සහ පහත් සංඥා අවකල ඇම්ප්ලිෆයර් වෙත ඇතුල් වන අතර, සැකසෙන අතර පාලන ඒකකයේ ආදානය වෙත යවනු ලැබේ.
මෙම සංඥා අවකල ඇම්ප්ලිෆයර් නිමැවුමේ වෝල්ටීයතාවය නියෝජනය කරයි.
අවකල ඇම්ප්ලිෆයර් මෙම ප්රතිදාන වෝල්ටීයතාව ජනනය කරන්නේ CAN බසයේ ඉහළ සහ පහත් වයර්වල වෝල්ටීයතාව අතර වෙනස ලෙසිනි.
මෙය මූලික වෝල්ටීයතාවයේ බලපෑම (බල ඒකකයේ CAN බසය සඳහා එය 2.5 V වේ) හෝ බාහිර ශබ්දය නිසා ඇතිවන ඕනෑම වෝල්ටීයතාවයක් ඉවත් කරයි.
මාර්ගය වන විට, මැදිහත්වීම ගැන. ඔවුන් පවසන පරිදි, "ටයර් CAN එය මැදිහත්වීම් වලට බෙහෙවින් ප්රතිරෝධී වේ, එබැවින් එය බහුලව භාවිතා වේ."
අපි මෙය තේරුම් ගැනීමට උත්සාහ කරමු.
CAN බස් වයර් බල ඒකකය පිහිටා ඇත එන්ජින් මැදිරියසහ ඒවාට විවිධ ආකාරයේ මැදිහත්වීම් වලට බලපෑම් කළ හැකිය, නිදසුනක් ලෙස, ජ්වලන පද්ධතියෙන් මැදිහත් වීම.
CAN බස් එකේ ඉඳන් එකට ඇඹරුණු වයර් දෙකකින් සමන්විත වේ, එවිට බාධා කිරීම් එකවර වයර් දෙකකට බලපායි:

ඉහත රූපයෙන් ඔබට ඊළඟට සිදුවන්නේ කුමක්දැයි දැක ගත හැකිය: අවකල ඇම්ප්ලිෆයර් තුළ, අඩු වයර් මත වෝල්ටීයතාවය (1.5 V - " Pp ") වෝල්ටීයතාවයෙන් අඩු කරනු ලැබේ
ඉහළ වයරය මත (3.5 V - " Pp ") සහ සැකසූ සංඥාවෙහි කිසිදු බාධාවක් නොමැත (" Pp" - මැදිහත් වීම).

සටහන: කාලය තිබේද යන්න මත, ලිපිය දිගටම කරගෙන යා හැක - බොහෝ දේ "තිරය පිටුපස" පවතී.
කුචර් වී.පී.
© Legion-Avtodata
ඔබ ද උනන්දු විය හැකිය:
CAN බස් රථයක් යනු කුමක්ද?
CAN හි ඉතිහාසය ආරම්භ වූයේ පසුගිය ශතවර්ෂයේ 80 ගණන්වල මැද භාගයේදීය. Bosch, Intel සමඟ එක්ව දත්ත හුවමාරුව සඳහා නව ඩිජිටල් අතුරු මුහුණතක් සංවර්ධනය කර ඇත - Controller Area Network (CAN).

ඇනලොග් එලාම් සම්බන්ධතාවය (CAN බස් නොමැතිව)
ඔබට මෝටර් රථයක CAN බස් රථයක් අවශ්ය වන්නේ ඇයි?
CAN බසය මඟින් මෝටර් රථයේ ඇති ඕනෑම සංවේදක, පාලක, ක්රියාකාරක සහ වෙනත් ඒකක සම්බන්ධ කිරීමට ඔබට ඉඩ සලසයි (උදාහරණයක් ලෙස: ABS, SRS AIRBAG, ESP පද්ධති, ප්රතිශක්තිකරණය, එන්ජින් පාලන ඒකකය, දේශගුණ පාලනය, ගියර් පෙට්ටිය, මධ්යම අගුලු දැමීම, ආලෝකය, පෙන්ඩන්ට්, උපකරණ පුවරුව etc...) duplex මාදිලියේ (දත්ත පිළිගැනීම සහ සම්ප්රේෂණය) 1 Mbit/s දක්වා වේගයකින්. ඒ අතරම, කෑන් බස් රථය සමන්විත වන්නේ වයර් දෙකකින් පමණි (ඇඹරුණු යුගල). මීට පෙර, බ්ලොක් සම්බන්ධ කිරීමට වයර් සිය ගණනක් භාවිතා කිරීමට සිදු වූ නිසා ... බ්ලොක් සිට බ්ලොක් දක්වා තොරතුරු ඒකකයක් සම්ප්රේෂණය වෙනම වයර් හරහා සිදු කරන ලදී.

CAN බස් රථය හරහා අනතුරු ඇඟවීමක් ස්ථාපනය කිරීම
CAN මොඩියුලය සහිත මෝටර් රථ අනතුරු ඇඟවීම්.

CAN මොඩියුලය
නවීන මෝටර් රථ අනතුරු ඇඟවීම් නිෂ්පාදනය කරනු ලබන්නේ ඒකාබද්ධ CAN මොඩියුලයකින් වන අතර එමඟින් ඔබට සම්බන්ධ වීමට ඉඩ සලසයි කාර් එලාම්කෙලින්ම වෙත ඩිජිටල් බස් වාහනය CAN. කාර් එලාම් එක ලැබෙයි ඩිජිටල් ආකෘතියසීමා ස්විචයන්, අගුල්, ජ්වලනය, අත් තිරිංග, ටචෝමීටරය ආදියෙහි තත්ත්වය පිළිබඳ තොරතුරු. සහ දොර අගුල්, බල කවුළු, සන්රූෆ්, සම්මත එලාම් සහ වෙනත් වාහන පද්ධති පාලනය කළ හැකිය. සම්මත විදුලි රැහැන් වල ඇඟිලි ගැසීම් සැලකිය යුතු ලෙස අඩු කිරීමට ඔබට ඉඩ සලසයි (සම්බන්ධතා සිදු කරනු ලබන්නේ වයර් 6-8 කට පමණි, කෑන් බස් රථයක් භාවිතා නොකර අනුවාදයේ 15-20 වෙනුවට) සහ මෝටර් රථයේ විදුලි උපකරණවල වගකීම් පිළිබඳ ගැටළු මඟහරවා ගනී.
නවීන මෝටර් රථයක් යනු ප්රවාහන මාධ්යයක් පමණක් නොව, බහුමාධ්ය කාර්යයන් සහිත උසස් ගැජට් එකකි ඉලෙක්ට්රොනික පද්ධතියපාලන ඒකක සහ සංවේදක පොකුරක්. බොහෝ මෝටර් රථ නිෂ්පාදකයින් රථවාහන සහායකයින්, වාහන නැවැත්වීමේ සහායකයින්, දුරකථනයෙන් මෝටර් රථය නිරීක්ෂණය කිරීම සහ පාලනය කිරීම යන කාර්යයන් ඉදිරිපත් කරයි. භාවිතා කිරීම නිසා මෙය කළ හැකි ය ස්වයංක්රීය CANසියලුම පද්ධති සම්බන්ධ කර ඇති බසය: එන්ජිම, තිරිංග පද්ධතිය, සුක්කානම, බහුමාධ්ය, දේශගුණය, ආදිය.
මගේ මෝටර් රථය ස්කොඩා ඔක්ටේවියා 2011 දුරකථනයෙන් පාලන හැකියාවන් ලබා නොදේ, එබැවින් මම මෙම අඩුපාඩුව නිවැරදි කිරීමට තීරණය කළ අතර ඒ සමඟම හඬ පාලන කාර්යයක් එක් කළෙමි. CAN බස් රථය සහ දුරකථනය අතර දොරටුවක් ලෙස, මම CAN BUS පලිහක් සහ TP-Link WiFi රවුටරයක් සහිත Raspberry Pi එකක් භාවිතා කරමි. මෝටර් රථ ඒකක අතර සන්නිවේදන ප්රොටෝකෝලය වසා ඇත, Volkswagen මගේ සියලුම ලිපි සඳහා ප්රොටෝකෝල ලියකියවිලි සැපයීම ප්රතික්ෂේප කළේය. ඒක තමයි එකම මාර්ගයමෝටර් රථයක උපාංග සන්නිවේදනය කරන්නේ කෙසේදැයි සොයා බැලීමට සහ ඒවා පාලනය කරන්නේ කෙසේදැයි ඉගෙන ගැනීමට VW CAN බස් ප්රොටෝකෝලය ප්රතිලෝම ඉංජිනේරු කිරීම වේ.
මම පියවරෙන් පියවර ක්රියා කළා:
- මෝටර් රථයක CAN බසයට සම්බන්ධ කිරීම
- Homekit සහ Siri සමඟ හඬ පාලනය
Raspberry Pi සඳහා CAN පලිහක් සංවර්ධනය කිරීම
මම මෙතනින් shield circuit එක ගත්තා lnxpps.de/rpie, කටු ගැන විස්තරයක් ද ඇත, CAN සමඟ සන්නිවේදනය කිරීමට MCP2515 සහ MCP2551 ක්ෂුද්ර පරිපථ 2 ක් භාවිතා කරයි. CAN-High සහ CAN-Low වයර් 2ක් පලිහට සම්බන්ධ කර ඇත. මම පුවරුව SprintLayout 6 හි තැබුවෙමි, සමහර විට යමෙකුට CANBoardRPi.lay ප්රයෝජනවත් වනු ඇත (මාතෘකා ඡායාරූපයෙහි පාන් පුවරුවක ඇති පලිහක මූලාකෘතියකි).

CAN බසය සමඟ වැඩ කිරීම සඳහා මෘදුකාංග ස්ථාපනය කිරීම
වසර 2කට පෙර Raspbian හි මට CAN සහාය එක් කිරීමට bcm2708.c පැච් කිරීමට අවශ්ය විය (සමහර විට මෙය දැන් අවශ්ය නොවේ). CAN බසය සමඟ වැඩ කිරීමට, ඔබ github.com/linux-can/can-utils වෙතින් can-utils උපයෝගිතා පැකේජය ස්ථාපනය කළ යුතුය, ඉන්පසු මොඩියුල පූරණය කර කෑන් අතුරුමුහුණත ඔසවන්න:# initialize insmod spi-bcm2708 insmod can insmod can-dev insmod can-raw insmod can-bcm insmod mcp251x # Maerklin Gleisbox (60112 සහ 60113) 250000 # loopback මාදිලිය පරීක්ෂා කිරීම සඳහා can ip 0 ටයිප් ip 0 ලින්ක් 0 ටයිප් 0 ටයිප් 0 යිප් 0 ලින්ක් 0 ටයිප් 0 ටයිප් 0 ටයිප් 0 ටයිප් 0 ටයිප්
CAN අතුරුමුහුණත විධානය සමඟ ඇති බව අපි පරීක්ෂා කරමු ifconfig:

විධානයක් යවා එය ලැබීමෙන් සියල්ල ක්රියාත්මක වන බව ඔබට පරීක්ෂා කළ හැකිය.
එක් පර්යන්තයක අපි සවන් දෙමු:
Root@raspberrypi ~ # candump any,0:0,#FFFFFFFF
වෙනත් පර්යන්තයක අපි යවන්නේ:
Root@raspberrypi ~ # cansend can0 123 # deadbeef
තව සවිස්තරාත්මක ක්රියාවලියස්ථාපනය මෙහි විස්තර කර ඇත lnxpps.de/rpie.
මෝටර් රථයක CAN බසයට සම්බන්ධ කිරීම
VW CAN බස් එකේ open documentation ටිකක් අධ්යයනය කරලා මම බස් 2ක් පාවිච්චි කරන බව දැනගත්තා.Powertrain CAN බස්, 500 kbit/s වේගයකින් දත්ත සම්ප්රේෂණය කිරීම, මෙම ඒකකයට සේවය කරන සියලුම පාලන ඒකක සම්බන්ධ කරයි.
උදාහරණයක් ලෙස, පහත උපාංග බල ඒකකයේ CAN බසයට සම්බන්ධ කළ හැකිය:
- එන්ජින් පාලන ඒකකය,
- ABS පාලන ඒකකය,
- විනිමය අනුපාත ස්ථායීකරණ පද්ධතිය සඳහා පාලන ඒකකය,
- සම්ප්රේෂණ පාලන ඒකකය,
- වායු බෑග් පාලන ඒකකය,
- උපකරණ පොකුර.
උදාහරණයක් ලෙස, Comfort පද්ධතියේ CAN බස් රථයට සහ තොරතුරු<командной системы могут быть
පහත උපාංග සම්බන්ධ කර ඇත:
- Climatronic පද්ධතිය හෝ වායු සමීකරණ පද්ධතිය සඳහා පාලන ඒකකය,
- මෝටර් රථ දොරවල්වල පාලන ඒකක,
- සුවපහසු පද්ධති පාලන ඒකකය,
- ගුවන්විදුලි සහ නාවික පද්ධතිය සඳහා සංදර්ශකය සහිත පාලන ඒකකය.
බස් දෙකම සම්බන්ධ කර ඇත්තේ සුක්කානම යට ප්රදේශයේ පිහිටා ඇති ද්වාරයක් හරහා වන අතර, රෝග විනිශ්චය OBD2 සම්බන්ධකය ද ගේට්වේ වෙත සම්බන්ධ කර ඇත, අවාසනාවකට, ඔබට OBD2 සම්බන්ධකය හරහා බස් රථ දෙකෙන්ම ගමනාගමනයට සවන් දිය නොහැක, ඔබට යැවිය හැක්කේ පමණි විධානයක් සහ තත්වය ඉල්ලා සිටින්න. මම "Comfort" බස් රථය සමඟ පමණක් වැඩ කරන බව මම තීරණය කළ අතර, බස් රථයට සම්බන්ධ වීමට වඩාත් පහසු ස්ථානය වූයේ රියදුරුගේ දොරේ සම්බන්ධකයයි.

දැන් මට Comfort CAN බසයේ සිදුවන සෑම දෙයක්ම අසා විධාන යැවීමට හැකිය.
Sniffer සංවර්ධනය කිරීම සහ CAN බස් ප්රොටෝකෝලය අධ්යයනය කිරීම

මට CAN බසයට සවන් දීමට ප්රවේශය ලැබීමෙන් පසු, කවුරුන් වෙත කුමක් සම්ප්රේෂණය කරන්නේද යන්න තේරුම් ගැනීමට මට අවශ්ය වේ. CAN පැකට් ආකෘතිය රූපයේ දැක්වේ.

Can-utils කට්ටලයේ ඇති සියලුම උපයෝගිතා වලට CAN පැකට් විග්රහ කළ හැකි අතර ප්රයෝජනවත් තොරතුරු පමණක් සැපයිය හැකිය, එනම්:
- හඳුනාගැනීම
- දත්ත දිග
- දත්ත
macOS සඳහා මම එක් එක් උපාංග ලිපිනය සඳහා වගුවට කොටුවක් එක් කරන සරල යෙදුමක් ලිවූ අතර මෙම කොටුව තුළ මට දැනටමත් දත්ත වෙනස් වන්නේ කුමක්දැයි දැක ගත හැකිය.

මම බල කවුළු බොත්තම ඔබන්න, දත්ත වෙනස් වන කොටුවක් මට හමු විය, පසුව පහළට එබීම, එබීම, අල්ලාගෙන සිටීම, රඳවා තබා ගැනීම සඳහා අනුරූප වන විධානයන් මම තීරණය කළෙමි.
ටර්මිනලයෙන් යැවීමෙන් විධානය ක්රියා කරන දැයි ඔබට පරීක්ෂා කළ හැකිය, උදාහරණයක් ලෙස, වම් වීදුරුව ඉහළට ඔසවන විධානය:
Cansend can0 181#0200
ප්රතිලෝම ඉංජිනේරු විද්යාව භාවිතයෙන් ලබාගත් VAG මෝටර් රථවල (Skoda Octavia 2011) CAN බසය හරහා උපාංග සම්ප්රේෂණය කරන විධාන:
// ඉදිරිපස වම් වීදුරුව ඉහළට 181#0200 // ඉදිරිපස වම් වීදුරුව පහළට 181#0800 // ඉදිරිපස දකුණු වීදුරුව ඉහළට 181#2000 // ඉදිරිපස දකුණු වීදුරුව පහළට 181#8000 // පසුපස වම් වීදුරුව ඉහළට 181#00 පහළට 181#0008 // ආපසු දකුණට වීදුරුව ඉහළට 181#0020 // පසුපස දකුණට වීදුරුව පහළට 181#0080 // මධ්යම අගුල විවෘත කරන්න 291#09AA020000 // මධ්යම අගුල වසන්න 291#0955040000 මධ්යම අගුලු දැමීමේ තත්ත්වය විධානය අගුල විවෘත/වසා දමන්න, එවිට අගුළු පාලන බොත්තමේ LED තත්ත්වය වෙනස් නොවේ, එවිට එය මධ්යම අගුලේ සැබෑ තත්වය පෙන්වයි, ඔබට යාවත්කාලීන විධානයක් යැවිය යුතුය) 291#0900000000
අනෙක් සියලුම උපාංග අධ්යයනය කිරීමට මට කම්මැලි විය, එබැවින් මෙම ලැයිස්තුවේ, මට සිත්ගන්නා දේ පමණි.
දුරකථන යෙදුම් සංවර්ධනය
ලැබුණු විධානයන් භාවිතා කරමින්, මම අයිෆෝන් සඳහා අයදුම්පතක් ලිවීය, එය කවුළු විවෘත කිරීම / වසා දැමීම සහ මධ්යම අගුලු දැමීම පාලනය කරයි.Raspberry Pi හි I කුඩා සේවාදායකයන් 2ක් දියත් කරන ලදී, පළමුවැන්න candump සිට TCP/IP වෙත දත්ත යවයි, දෙවැන්න iPhone වෙතින් විධාන ලබාගෙන ඒවා cansend වෙත යවයි.

iOS සඳහා මෝටර් රථ පාලන යෙදුමේ මූලාශ්ර
// // FirstViewController.m // කාර් පාලනය // // Vitaliy Yurkin විසින් 05/17/15 දින නිර්මාණය කරන ලදී. // ප්රකාශන හිමිකම (ඇ) 2015 විටාලි යූර්කින්. සියලු හිමිකම් ඇවිරිණි. // #import "FirstViewController.h" #import "DataConnection.h" #import "CommandConnection.h" @interface FirstViewController ()
දුරකථනය සඳහා ඔබේම යෙදුමක් ලිවීමට ක්රමයක් නැත, නමුත් ස්මාර්ට් නිවාස ලෝකයෙන් සූදානම් කළ එකක් භාවිතා කිරීමට, ඔබට Raspberry Pi හි ස්වයංක්රීයකරණ පද්ධතියක් ස්ථාපනය කිරීමට අවශ්ය වේ.
නවීන මෝටර් රථයක් විවිධ පද්ධති සඳහා ඉලෙක්ට්රොනික පාලන ඒකක වලින් සමන්විත වේ: එන්ජිම, ප්රති-අගුළු තිරිංග පද්ධතිය, ශරීරය සහ වෙනත් අය. අත්යවශ්යයෙන්ම, මෙම ඒකක ක්ෂුද්ර පරිගණක වේ.
මෝටර් රථයක CAN බසයක් යනු කුමක්දැයි වටහා ගැනීම සඳහා, මෙම ක්ෂුද්ර පරිගණක සම්බන්ධ කර ඇති මෝටර් රථයේ දේශීය ජාලයක් සංවිධානය කර ඇති බව සිතන්න - එවිට ඒවා එකට ක්රියා කරයි.
මෙය කාර්යාලීය පරිගණක ජාලයකට සම්බන්ධ කර ඇති ආකාරය හා සමාන වන අතර එමඟින් සේවකයින්ට පහසුවෙන් එකිනෙකාගෙන් තොරතුරු ලබා ගත හැකි අතර කාර්යාල සේවකයින්ගේ වැඩ ඉක්මනින් නිරීක්ෂණය කිරීමට ප්රධානියාට අවස්ථාව තිබේ.
ඔන්-බෝඩ් පරිගණකය සහ රෝග විනිශ්චය පද්ධතිය මෝටර් රථයේ ප්රධානියා ලෙස ක්රියා කරයි.
පාලක ප්රදේශ ජාලයේ සංවර්ධනය හා ඒකාබද්ධ කිරීමේ ඉතිහාසය
BOSCH සමාගම, පසුගිය ශතවර්ෂයේ 80 ගණන්වල ස්වයංක්රීයකරණ ක්ෂේත්රයේ පර්යේෂණ සිදු කරමින්, මෝටර් රථ කර්මාන්තයේ භාවිතා කළ හැකි ක්ෂුද්ර පාලක සන්නිවේදන ප්රමිතියක් යෝජනා කළේය.
CAN ප්රමිතිය මෝටර් රථවලට පමණක් සීමා නොවේ. වර්තමානයේ, එය "ස්මාර්ට් හෝම්" සංකල්පය, කාර්මික ස්වයංක්රීයකරණය, ආදියෙහි භාවිතා වේ.
මෝටර් රථ තාක්ෂණයට අදාළ වන පරිදි, CAN (Controller Area Network) ප්රමිතිය භෞතික ස්ථරයක් සහිත බස් රථයකට අනුගත වේ. එය විවිධ ධ්රැවීයතාවන්හි සංඥා පැකට් ගමන් කරන විකෘති වූ සන්නායක යුගලයක් භාවිතයෙන් සංවිධානය කර ඇත.
මෙම ප්රමිතියට ISO 11898 ජාත්යන්තර වර්ගීකරණය ලැබී ඇත. රාමුවකට (පැකට්ටුවකට) 11-bit තොරතුරු සංඥාවක් (හෝ විස්තීරණ ආකාරයෙන් 29-bit) ඇතුළත් වේ.
සාමාන්යයෙන්, CAN බස් රථයක් ඇඹරුණු යුගල වයර් භාවිතයෙන් ක්රියාත්මක කළ නොහැක. මෙය ඔප්ටිකල් ෆයිබර් හෝ රේඩියෝ නාලිකාවක් විය හැකිය.
මිනිසුන් රහිත වාහන හඳුන්වාදීමත් සමඟ CAN බස් රථය එක් අයෙකු සඳහා තොරතුරු සම්ප්රේෂණය කිරීම සඳහා ජංගම අතුරු මුහුණතක් බවටත් සමහර විට මෝටර් රථ සංකීර්ණයක් බවටත් පරිවර්තනය වනු ඇතැයි උපකල්පනය කළ හැකිය.
කාර් CAN බස්: එය කුමක්ද සහ එහි මෙහෙයුම් මූලධර්මය
බස් රථය යනු විවිධ වාහන පද්ධතිවල පාලන ඒකක අතර තොරතුරු හුවමාරු වන දේශීය ජාලයකි. මේ අනුව, පාලක ඒකකය, උදාහරණයක් ලෙස, මෝටර් රථ එන්ජිමක, එන්ජිමට සේවා සපයන ප්රධාන ක්ෂුද්ර පාලකයට අමතරව, CAN පාලකයක් ඇති බව උපකල්පනය කරයි, එය බස් රථ දෙකක් ඔස්සේ ස්පන්දන ජනනය කරයි: CAN-ඉහළ සහ CAN-පහළ (H සහ L. )
මෙම සංඥා සම්ප්රේෂකයක් මගින් සන්නායක (විකෘති යුගල) හරහා සම්ප්රේෂණය වේ. සම්ප්රේෂක, හෝ සම්ප්රේෂක, නිර්මාණය කර ඇත්තේ:
- සංඥා විස්තාරණය,
- සම්ප්රේෂිත ස්පන්දනවල ශබ්ද ප්රතිශක්තිය සහතික කිරීම;
- ඩිජිටල් ප්රවාහ සම්ප්රේෂණ වේගය සකස් කිරීම;
- CAN බසයට හානි වූ විට රේඛීය ආරක්ෂාව.
පහත දැක්වෙන සම්ප්රේෂක වර්ග දැන් මෝටර් රථ තාක්ෂණයේ භාවිතා වේ - අධිවේගී සහ දෝෂ ටොලරන්. අධිවේගී සම්ප්රේෂකය තොරතුරු හුවමාරුවේ සාපේක්ෂව ඉහළ වේගයක් සපයයි - තත්පරයට මෙගාබිට් 1 දක්වා. දෙවන වර්ගයේ සම්ප්රේෂකය අඩු තොරතුරු හුවමාරු වේගයක් ඇත - තත්පරයට කිලෝබිට් 120 දක්වා. නමුත් එය CAN බසයේ ගුණාත්මක භාවයට අඩු සංවේදී (දෝෂවලට ඔරොත්තු දෙන) සහ එහි පරාමිතීන්හි අපගමනයට ඉඩ සලසයි.
දත්ත හුවමාරු සංවිධාන රූප සටහන
විවිධ වාහන ඒකක CAN බස් රථයට සම්බන්ධ කිරීමේ ව්යුහාත්මක රූප සටහන පහත පරිදි නිරූපණය කළ හැකිය:

සියලුම උපාංග සම්බන්ධීකරණය කිරීම සඳහා, එනම්, ප්රශස්ත තත්ත්වයන් සහ පිළිගැනීමේ හා සම්ප්රේෂණය කිරීමේ වේගය සංවිධානය කිරීම සඳහා, සම්ප්රේෂකයන්ගේ ප්රතිදාන ප්රතිරෝධයන් ආසන්න වශයෙන් සමාන විය යුතුය.
වාහන පද්ධතිවල පාලන ඒකක කිසිවක් විසන්ධි වී හෝ හානි වී ඇත්නම්, බස් ප්රතිරෝධය වෙනස් වේ, ප්රතිරෝධය ගැලපීම කඩාකප්පල් වේ, එමඟින් බස් රථයේ තොරතුරු හුවමාරු වීමේ වේගය සැලකිය යුතු ලෙස අඩු වේ. එවැනි උල්ලංඝනයන් CAN බසය හරහා සන්නිවේදනය සම්පූර්ණයෙන්ම අහිමි වීමට හේතු විය හැක.
සමහර වාහනවල, CAN තොරතුරු සමමුහුර්ත කිරීමේ ගැටළු ඉවත් කිරීම සඳහා වෙනම ගේට්වේ මොඩියුලයක් භාවිතා කරයි.

CAN බසය හරහා සම්ප්රේෂණය වන සෑම පණිවිඩයකටම තමන්ගේම හඳුනාගැනීමක් ඇත, උදාහරණයක් ලෙස “සිසිලන උෂ්ණත්වය” සහ “සෙල්සියස් අංශක 98.7” වැනි එහි අගයට අනුරූප කේතයක්. මේවා අනිවාර්යයෙන්ම නිරපේක්ෂ අගයන් නොවේ;

ප්රධාන වාහන පද්ධති පිළිබඳ තොරතුරු නිරීක්ෂණය කිරීමට සහ සැකසීමට රෝග විනිශ්චය මෙවලම් මගින් එම දත්තම භාවිතා කරයි.
CAN බස් රථයේ ප්රධාන මෙහෙයුම් ක්රම:
- ක්රියාකාරී (ගිනිගැනීම මත);
- නිදාගැනීම (දැල්වීම නිවා දැමීමත් සමඟ);
- අවදි වීම සහ නින්දට වැටීම (දැල්වීම සහ අක්රිය කරන විට).
නින්දේ මාදිලියේදී, බස් වත්මන් පරිභෝජනය අවම වේ. කෙසේ වෙතත්, ඒ සමගම, දොරවල් සහ ජනෙල් විවෘත කිරීමේ තත්වය පිළිබඳ සංඥා සහ මෝටර් රථයේ ආරක්ෂක කාර්යයන් සම්බන්ධ අනෙකුත් පද්ධති බස් රථය හරහා සම්ප්රේෂණය වේ (අඩු සංඛ්යාතයකින්).
බොහෝ නවීන රෝග විනිශ්චය උපාංග CAN බසය හරහා දෝෂ හඳුනාගැනීම සඳහා මාදිලියක් සපයයි. තාක්ෂණික වශයෙන්, මෙය සන්නායක සෘජුවම රෝග විනිශ්චය සම්බන්ධකයට සම්බන්ධ කිරීම මගින් සංවිධානය කරනු ලැබේ.

මෝටර් රථයක CAN බසය භාවිතා කිරීමේ වාසි සහ අවාසි
ආරම්භ කිරීම සඳහා, පසුගිය ශතවර්ෂයේ 80 ගණන්වල CAN ප්රමිතිය යෝජනා නොකළේ නම්, වාහන පද්ධති අතර තවත් ආකාරයක අන්තර්ක්රියා එහි ස්ථානයට පත්වනු ඇත.
ඇත්ත වශයෙන්ම, සියලුම වාහන පද්ධති පාලන ඒකක තනි සුපිරි බ්ලොක් එකක තැබීමට හැකි අතර, විවිධ පද්ධතිවල අන්තර්ක්රියා මෘදුකාංග මගින් සහතික කළ හැකිය. ප්රංශ නිෂ්පාදකයින් ද එවැනිම උත්සාහයන් කර ඇත. කෙසේ වෙතත්, ක්රියාකාරිත්වය සහ කාර්ය සාධනය වැඩි වන විට, අසාර්ථක වීමේ සම්භාවිතාව සැලකිය යුතු ලෙස වැඩි වේ. උදාහරණයක් ලෙස, වයිපර් වල අසාර්ථකත්වය, එන්ජිම ආරම්භ කිරීමට අසමත් වීමට හේතු විය හැක.
CAN බස් රථයක් භාවිතා කිරීමේ ප්රධාන වාසි:
- මෙහෙයුම් පාලනය පැවැත්වීමේ හැකියාව සහ;
- තනි ශබ්ද-ප්රතිරෝධක නාලිකාවක තොරතුරු ප්රවාහයන් ඒකාබද්ධ කිරීම;
- බහුකාර්යතාව, රෝග විනිශ්චය ක්රියාවලීන් ඒකාබද්ධ කිරීම සඳහා පහසුකම් සැලසීම;
- CAN බසය හරහා ආරක්ෂක පද්ධති සම්බන්ධ කිරීමේ හැකියාව (එක් එක් පාලන මූලද්රව්යයට රැහැන් ධාවනය කිරීම අවශ්ය නොවේ).
CAN බස් රථයේ අවාසි:
- අඩු විශ්වසනීයත්වය;
- පාලන ඒකක වලින් එකකට හානි වීම CAN සම්බන්ධතාවයේ සම්පූර්ණ අක්රියතාවයට හේතු විය හැක.
දෝෂගවේෂණය
වාහනයේ උපකරණ පුවරුවේ CAN දෝෂ දර්ශක ආලෝකයක් නොමැත. වක්ර දර්ශක මගින් CAN බස් රථයේ ක්රියාකාරිත්වය අඩපණ වී ඇති බව ඔබට විනිශ්චය කළ හැකිය:
- දෝෂ දර්ශක ලාම්පු කිහිපයක් එකවර උපකරණ පුවරුව මත දැල්වී ඇත;
- සිසිලනකාරක උෂ්ණත්වය සහ ඉන්ධන මට්ටම අතුරුදහන්;
පළමුවෙන්ම, ඔබ රෝග විනිශ්චය කළ යුතුය. එය CAN බස් දෝෂයක් පෙන්නුම් කරන්නේ නම්, ඔබ ගැටළුව විසඳීමට පටන් ගත යුතුය.
වැඩ අනුපිළිවෙල:
- ඇඹරුණු යුගල බස් රථයේ කොන්දොස්තර සොයන්න. ඒවා බොහෝ විට කළු (ඉහළ) සහ තැඹිලි-දුඹුරු (පහළ) වේ.
- බහුමාපකයක් භාවිතයෙන් ජ්වලනය සමඟ සන්නායකවල වෝල්ටීයතාව පරීක්ෂා කරන්න. මට්ටම් 0 හෝ Volts 11 ට වැඩි නොවිය යුතුය (සාමාන්යයෙන් Volts 4.5 පමණ).
- ජ්වලනය අක්රිය කර බැටරි පර්යන්තය විසන්ධි කරන්න. සන්නායක අතර ප්රතිරෝධය මැනීම. බිංදුවට නැඹුරු වෙනවා නම් ඒ කියන්නේ බස් එකේ ෂෝට් සර්කිට් එකක් තියෙනවා, අනන්තයට ලං උනොත් බ් රේක් එකක් තියෙනවා.
- විවෘත පරිපථයක් හෝ කෙටි පරිපථයක් සෙවීම ආරම්භ කරන්න.
- කිසියම් පාලන ඒකකයක් අසමත් වීම හේතුවෙන් බස් රථය වසා ඇති බවට සැකයක් තිබේ නම්, ඔබට අනුපිළිවෙලින් පාලන ඒකක අක්රිය කර බස් රථයේ ප්රතිරෝධය සහ කාර්ය සාධනය නිරීක්ෂණය කළ හැකිය.
CAN බස් දෝෂයක් යනු වාහනයේ විදුලි උපකරණවල සංකීර්ණ දෝෂයකි. මෝටර් රථ හිමිකරුට අවශ්ය විදුලි අලුත්වැඩියා කුසලතා නොමැති නම්, විශේෂඥයෙකුගේ සේවාවන් භාවිතා කිරීම වඩා හොඳය.



