![]() සමාගම විසින් නිෂ්පාදනය කරන ලද අර්ධ සන්නායක සංරචක පරාසය ටෙක්සාස් උපකරණසියලුම වර්ගවල පාලනය සඳහා රියදුරු චිප්ස් විදුලි මෝටරඔවුන් දියුණු වන විට, වැඩි වැඩියෙන් සොයා ගන්න පුළුල් යෙදුමවිවිධ උපකරණවල. සමාගම විශ්වාසදායක සහ පහසු ක්රියාකාරිත්වය සහතික කරමින් පුළුල් පරාසයක ධාරා සහ වෝල්ටීයතාවයකින් ක්රියාත්මක වන ධාවකයන් නිර්මාණය කිරීම සඳහා විසඳුම් ඉදිරිපත් කරයි. එකතු කරන්නා,බුරුසු රහිතසහ ස්ටෙපර් මෝටරධාරාව, වෝල්ටීයතාව සහ උෂ්ණත්වය සඳහා සම්පූර්ණ පරාසයක ආරක්ෂාවක් සහිතව.
සමාගම විසින් නිෂ්පාදනය කරන ලද අර්ධ සන්නායක සංරචක පරාසය ටෙක්සාස් උපකරණසියලුම වර්ගවල පාලනය සඳහා රියදුරු චිප්ස් විදුලි මෝටරඔවුන් දියුණු වන විට, වැඩි වැඩියෙන් සොයා ගන්න පුළුල් යෙදුමවිවිධ උපකරණවල. සමාගම විශ්වාසදායක සහ පහසු ක්රියාකාරිත්වය සහතික කරමින් පුළුල් පරාසයක ධාරා සහ වෝල්ටීයතාවයකින් ක්රියාත්මක වන ධාවකයන් නිර්මාණය කිරීම සඳහා විසඳුම් ඉදිරිපත් කරයි. එකතු කරන්නා,බුරුසු රහිතසහ ස්ටෙපර් මෝටරධාරාව, වෝල්ටීයතාව සහ උෂ්ණත්වය සඳහා සම්පූර්ණ පරාසයක ආරක්ෂාවක් සහිතව.
නවීන අධි තාක්ෂණික ජීවන රටාව තුළ විදුලි මෝටර බහුලව භාවිතා වේ. මෙම වර්ගයේ විද්යුත් යාන්ත්රික ධාවකය තවමත් වඩාත් පොදු සහ ඉල්ලුමේ පවතී. විවිධ අරමුණු සඳහා වන විදුලි මෝටර ඕනෑම නිෂ්පාදනයක ප්රධාන අංගයක් වන අතර ඒවා කාර්යාල සහ ගෘහ උපකරණවල, ගොඩනැගිලි සහ පහසුකම් සඳහා අධීක්ෂණ සහ පාලන පද්ධතිවල බහුලව භාවිතා වේ. විදුලි මෝටර බහුලව භාවිතා වී ඇත නවීන ප්රවාහන. විද්යුත් වාහන සහ රොබෝ යන්ත්රවල විදුලි මෝටර සඳහා ඊටත් වඩා උද්යෝගිමත් අනාගතයක් තිබේ.
තාක්ෂණයේ දියුණුවත් එක්ක සාම්ප්රදායික එන්ජින්වැඩිදියුණු වෙමින් පවතින අතර නව යෙදුම් ක්ෂේත්ර සොයා ගනිමින් සිටී. නවීන අධි-නිරවද්ය යන්ත්ර මෙවලම් සහ රොබෝ තාක්ෂණය විදුලි මෝටර නොමැතිව සිතාගත නොහැක බුද්ධිමත් පද්ධතිකළමනාකරණ. ගොඩබිම, වාතය සහ ජලය යට විදුලි මෝටර බහුලව භාවිතා වන පරිවර්තකයක් ලෙස පවතී විද්යුත් ශක්තියයාන්ත්රික කිරීමට.
විදුලි මෝටර වර්ග, පාලන ක්රම සහ මුහුණ දුන් දුෂ්කරතා
1834 දී රුසියානු විද්යාඥ ජැකොබි විසින් මුලින්ම නිර්මාණය කරන ලද විද්යුත් ශක්තිය භ්රමණ චලිතය බවට පරිවර්තනය කිරීම විද්යුත් මෝටරයක් ලෙස හැඳින්වේ. එතැන් සිට, එය බරපතල ලෙස වැඩිදියුණු කර ඇත - බොහෝ නව විකල්ප දර්ශනය වී ඇත, නමුත් එය නිර්මාණය කිරීමේදී භාවිතා කරන විද්යුත් චුම්භකත්වයේ මූලධර්ම තවමත් නවීන විදුලි මෝටරවල සියලු වෙනස් කිරීම් වල පදනම වේ.
එය හරහා ගමන් කරන ධාරාවක් සහිත සන්නායකයක් (රූපය 1) තමන් වටා චුම්බක ක්ෂේත්රයක් නිර්මාණය කරයි, එහි තීව්රතාවය (චුම්බක ප්රේරණය) දඟරයක් (N) භාවිතා කිරීමේදී හැරීම් ගණනට සමානුපාතික වේ, සහ විශාලත්වය එය හරහා ගමන් කරන ධාරාව (I), B යනු චුම්බක දෛශික ප්රේරණය, K - චුම්බක නියතය, N - හැරීම් සංඛ්යාව, I - වත්මන් ශක්තිය.

ධාරාවෙහි දිශාව වෙනස් කිරීම සන්නායකයේ චුම්බක ක්ෂේත්රයේ දිශාවට ද බලපායි.
මෙම අවස්ථාවෙහිදී, බාහිර චුම්බක ක්ෂේත්රයක තබා ඇති ධාරා ප්රවාහක සන්නායකයක් Lorentz බලය මගින් ක්රියා කරන අතර, එය භ්රමණය වීමට හේතු වේ. චුම්බක ක්ෂේත්රයක ධාරා ගෙන යන සන්නායකයක් සඳහා සුප්රසිද්ධ දකුණු පස රීතිය භාවිතයෙන් භ්රමණය වන දිශාව පහසුවෙන් තීරණය වේ (රූපය 2). චුම්බක ක්ෂේත්රයක සන්නායකයක් මත ක්රියා කරන බලය (F) ක්ෂේත්ර චුම්බක ප්රේරක දෛශිකය (B) සහ සන්නායකයේ දිග (L) මගින් සන්නායකයේ වත්මන් ශක්තියේ (I) ගුණිතයට සමාන වේ. F = LIB.

බුරුසු සහිත මෝටර්
බුරුසු සහිත මෝටර් සෘජු ධාරාව(Brushed DC හෝ BDC, TI පාරිභාෂික භාෂාවෙන්) වර්තමානයේ බහුලව දක්නට ලැබෙන විද්යුත් චුම්භක භ්රමණ යාන්ත්රණයකි.
ස්ථීර චුම්බක වලින් එකලස් කරන ලද ස්ටෝටරයක චුම්බක ක්ෂේත්රය තුළ, දඟර සහිත බහු-අංශ ෙරොටර් භ්රමණය වන අතර, එය යුගල වශයෙන් සම්බන්ධ වන අතර, රෝටර් අක්ෂය මත මාරු කරන ලද එකතු කරන්නා ලැමෙල්ලා හරහා විකල්ප ලෙස සම්බන්ධ වේ (රූපය 3). සක්රිය කර ඇති දඟර යුගලයක් තෝරාගැනීම Gimlet ගේ නියමය අනුව Lorentz නීතියේ පදනම මත සිදු කෙරේ. වත්මන් මූලාශ්රය සෑම විටම ස්ටෝරර් චුම්බක ක්ෂේත්රයට සාපේක්ෂව 90 ° ට ආසන්න කෝණයකින් චුම්බක ක්ෂේත්ර රේඛා මාරු කරන ලද දඟර වලට සම්බන්ධ වේ.

මෙම වර්ගයේ විදුලි මෝටර බොහෝ විට ස්ටටෝරයක් භාවිතා කරයි ස්ථිර චුම්බක. ඔවුන් ඔබට පහසුවෙන් භ්රමණ වේගය සකස් කිරීමට ඉඩ ලබා දෙන අතර වෙනස් නොවේ ඉහළ පිරිවැය.
සමාන වර්ගයක 2-වංගු සහිත විදුලි මෝටරයක ප්රභේදයක් ද බහුලව භාවිතා වේ, නමුත් සමඟ ස්ටටෝටර් වංගු කිරීමස්ථිර චුම්බකයක් වෙනුවට. එවැනි ආකෘති විශාල ආරම්භක ව්යවර්ථයක් ඇති අතර නියත මත පමණක් නොව, ක්රියාත්මක කළ හැකිය ප්රත්යාවර්ත ධාරාව. මෙම වර්ගයේ විදුලි මෝටර විවිධ ගෘහ උපකරණවල විශ්වීය වශයෙන් භාවිතා වේ.
මෙම BDC සැලසුමේ අවාසි අතර ක්රියාත්මක වන විට බුරුසු-කොමියුටේටර් එකලස් කිරීම ඇතුළත් වේ. ඊට අමතරව, තනි රෝටර් වංගු මාරු කිරීමේදී ගිනි පුපුරු නිසා, වැඩි වූ මට්ටමපුපුරන සුලු පරිසරයක එවැනි මෝටර භාවිතා කිරීමට ඉඩ නොදෙන විද්යුත් චුම්භක මැදිහත්වීම්.
BDC එන්ජින්වල ලක්ෂණයක් වන්නේ රෝටරයේ උණුසුම වැඩි වීමයි, එය සිසිලනය වීම නිසා අපහසු වේ නිර්මාණ ලක්ෂණඑන්ජිම.
කොමියුටේටර් මෝටරවල වාසි:
- අඩු පිරිවැය;
- සරල පාලන පද්ධතිය;
- 2-වංගු කිරීම බුරුසු සහිත මෝටර්, ඉහළ ව්යවර්ථයක් ඇති අතර සෘජු හා ප්රත්යාවර්ත ධාරාවකින් ක්රියා කිරීමේ හැකියාව ඇත.
කොමියුටේටර් මෝටර ක්රියාත්මක කිරීමේ විශේෂාංග:
- බුරුසු වරින් වර නඩත්තු කිරීම සහ එන්ජින් විශ්වසනීයත්වය අඩු කිරීම අවශ්ය වේ;
- මාරු කිරීමේ ක්රියාවලියේදී, විදුලි පුළිඟු සහ විද්යුත් චුම්භක මැදිහත්වීම් සිදු වේ;
- උනුසුම් වන රෝටර් වලින් තාපය ඉවත් කිරීම අපහසුය.
බුරුසු රහිත මෝටර
DC මෝටර අතර තරමක් අඩු පොදු වන්නේ brushless design models (BrushLess DC හෝ BLDC), ස්ටෝරර් විද්යුත් චුම්භක අතර භ්රමණය වන ස්ථිර චුම්බක සහිත රෝටරයක් භාවිතා කරයි (රූපය 4). මෙහි වත්මන් මාරු කිරීම ඉලෙක්ට්රොනිකව සිදු කෙරේ. ස්ටෝරර් විද්යුත් චුම්භකවල දඟර මාරු කිරීම රෝටරයේ චුම්බක ක්ෂේත්රය එහි ක්ෂේත්රය අනුගමනය කරයි.
වත්මන් රෝටර් පිහිටීම සාමාන්යයෙන් නිරීක්ෂණය කරනු ලබන්නේ කේතීකරණ යන්ත්ර හෝ හෝල් ප්රයෝග සංවේදකයක් මගිනි, නැතහොත් මෙම අවස්ථාවෙහි වෙනම රොටර් පිහිටුම් සංවේදකයක් (SensorLess) භාවිතා නොකර වංගු මත ඇති පසුපස-EMF වෝල්ටීයතාවය මැනීමට තාක්ෂණය භාවිතා කරයි.
ස්ටටෝටර් වංගු වල වත්මන් ස්විචය භාවිතයෙන් සිදු කෙරේ ඉලෙක්ට්රොනික යතුරු(කපාට). බුරුසු රහිත BLDC මෝටර බොහෝ විට "කපාට ආකාරයේ" මෝටර ලෙස හඳුන්වන්නේ එබැවිනි. මෝටර් එතුම් යුගල සම්බන්ධ කිරීමේ අනුපිළිවෙල රෝටරයේ වත්මන් පිහිටීම මත රඳා පවතී.
BLDC හි මෙහෙයුම් මූලධර්මය පදනම් වී ඇත්තේ පාලකය ස්ටෝරර් එතුම් මාරු කරන අතර එමඟින් ස්ටෝරර් චුම්බක ක්ෂේත්ර දෛශිකය සෑම විටම රොටර් චුම්බක ක්ෂේත්ර දෛශිකයට සාපේක්ෂව 90 ° හෝ -90 ° ට ආසන්න කෝණයකින් මාරු වේ. මාරු කිරීමේදී භ්රමණය වන චුම්බක ක්ෂේත්රය ස්ථීර චුම්බක සහිත භ්රමකය පසුව චලනය වීමට හේතු වේ.
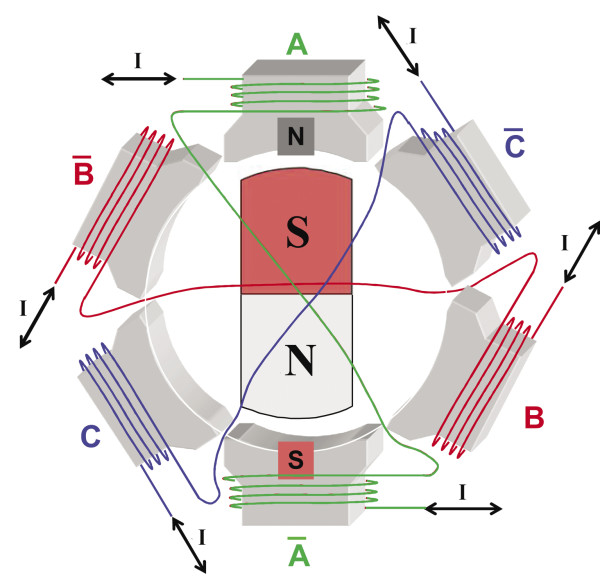
තෙකලා පාලන සංඥාවක් භාවිතා කරන විට, සෑම විටම වත්මන් ප්රභවයට සම්බන්ධ වී ඇත්තේ එතීෙම් යුගල දෙකක් පමණක් වන අතර, එකක් විසන්ධි වේ. එහි ප්රතිඵලයක් වශයෙන්, ප්රාන්ත හයක සංයෝජනයක් අනුපිළිවෙලින් භාවිතා වේ (රූපය 5).

රොටර් පිහිටුම් සංවේදක නොමැති විදුලි මෝටර නිෂ්පාදන ක්රියාවලියේ වැඩි නිෂ්පාදන හැකියාව සහ අඩු පිරිවැය මගින් සංලක්ෂිත වේ. මෙම සැලසුම බාහිර සම්බන්ධිත පර්යන්තවල මුද්රා තැබීම සරල කරයි.
ශාලා සංවේදක BLDC හි රොටර් වේගය සහ ස්ථාන සංවේදක ලෙස භාවිතා කළ හැක, ඒවා වෙනස් වේ අඩු පිරිවැය, නමුත් තරමක් අඩු විභේදනයක් සහිතව. වැඩිවන විභේදනය භ්රමණය වන ට්රාන්ස්ෆෝමර් (විසඳුම්) මගින් සපයනු ලැබේ. ඒවා මිල අධික වන අතර ඒවායේ ප්රතිදාන සංඥා sinusoidal බැවින් DAC භාවිතා කිරීම අවශ්ය වේ. ඔප්ටිකල් සංවේදකවල ඉහළ විභේදනයක් ඇත, නමුත් විශ්වසනීයත්වය අඩු වේ. එන්ජිම භ්රමකය භ්රමණය වන විට විවිධ වර්ගයේ සංවේදකවල ප්රතිදාන සංඥා රූප සටහන 6 පෙන්වයි.

BLDC මෝටර් වල වාසි:
- ඉහළ කාර්යක්ෂමතාව;
- බුරුසු නොමැති වීම, වැඩි විශ්වසනීයත්වය සහ නඩත්තු වියදම් අඩු කිරීම;
- වත්මන් / ව්යවර්ථ රේඛීයතාව;
- සරල කළ තාපය විසුරුවා හැරීම.
BLDC මෝටර භාවිතයේ විශේෂාංග:
- ෙරොටර් තත්ත්වය පිළිබඳ ප්රතිපෝෂණ සහිත වඩාත් සංකීර්ණ පාලන පද්ධතියක්;
- ව්යවර්ථ රැල්ල.
ස්ටෙපර් මෝටර
ස්ටෙපර් මෝටර (SM) ස්වයංක්රීයකරණය සහ පාලන පද්ධති තුළ බෙහෙවින් ව්යාප්ත වී ඇත. ඔවුන් තවත් වර්ගයකි බුරුසු රහිත මෝටර්සෘජු ධාරාව. ව්යුහාත්මකව, මෝටර ක්ෂේත්ර එතීෙම් පිහිටා ඇති ස්ටටෝරයකින් සහ චුම්බක ද්රව්ය වලින් සාදන ලද රෝටරයකින් සමන්විත වේ. චුම්බක රෝටරයක් සහිත ස්ටෙපර් මෝටර මඟින් වංගු විසන්ධි වූ විට රෝටරයේ වැඩි ව්යවර්ථයක් සහ දෘඩ සවි කිරීමක් ලබා දීමට හැකි වේ.
භ්රමණය අතරතුර, මෝටර් රෝටර් ස්ටටෝටර් වංගු වලට සපයනු ලබන බල ස්පන්දන පාලනය යටතේ පියවරෙන් පියවර ගමන් කරයි. ස්ටෙපර් මෝටර ආරම්භක-නැවතුම් මාදිලියේ ක්රියාත්මක වන යන්ත්ර සහ යාන්ත්රණවල ධාවකවල භාවිතා කිරීමට පහසුය. ඒවායේ චලනය වන පරාසය විද්යුත් ස්පන්දන නිශ්චිත අනුපිළිවෙලක් මගින් සකසා ඇත. එවැනි මෝටර ඉතා නිවැරදි වන අතර සංවේදක හෝ පරිපථ අවශ්ය නොවේ. ප්රතිපෝෂණ. භ්රමකයේ භ්රමණ කෝණය සපයනු ලබන පාලන ස්පන්දන සංඛ්යාව මත රඳා පවතී. ස්ථානගත කිරීමේ නිරවද්යතාවය (පියවර ප්රමාණය) මෝටරයේ සැලසුම් ලක්ෂණ, වංගු වල සම්බන්ධතා රූප සටහන සහ ඒවාට සපයන ලද පාලන ස්පන්දන අනුපිළිවෙල මත රඳා පවතී.
වංගු සම්බන්ධතා රූප සටහනේ වින්යාසය මත පදනම්ව, ස්ටෙපර් මෝටර බයිපෝලර් සහ ඒක ධ්රැවීය ලෙස බෙදා ඇත. බයිපෝලර් මෝටරයක එක් එක් අදියර දෙකෙහිම ස්ටටෝරයේ ධ්රැව දෙකටම තනි වංගු ඇත, එය චුම්බක ක්ෂේත්රයේ දිශාව වෙනස් කිරීම සඳහා රියදුරු විසින් ආපසු හැරවිය යුතුය. බයිපෝලර් මෝටරයක වංගු දෙකක් ඇති අතර, ඒ අනුව, නිමැවුම් හතරක් ඇත. එවැනි ස්ටෙපර් මෝටරයක් පාලනය කිරීම සඳහා, 2-ධ්රැවීය බල සැපයුමක් සහිත පාලම් ධාවකයක් හෝ අර්ධ පාලම් පරිපථයක් අවශ්ය වේ. බයිපෝලර් පාලනය සමඟ, වංගු දෙකක් එකවර ක්රියාත්මක වන අතර ව්යවර්ථය ආසන්න වශයෙන් 40% වැඩි වේ. රූප සටහන 7 පෙන්නුම් කරන්නේ බයිපෝලර් මෝටරයේ භ්රමණය අතරතුර පාලන සංඥා අනුපිළිවෙලයි.

ඒක ධ්රැව මෝටරයක් සෑම අදියරකදීම මැද පර්යන්තයක් සමඟ එක් වංගු භාවිතා කරන අතර අර්ධ වංගු හතරකට එක් ස්විචයක් සහිත සරල පාලන පරිපථයක් භාවිතා කිරීමට ඉඩ සලසයි.
බයිපෝලර් සහ ඒක ධ්රැව වින්යාස දෙකෙහිම එතීෙම් මෝටර හතරක් භාවිතා කළ හැක.
එක් දඟරයක් හරහා ධාරාව ගලා යන විට, රොටර් සහ ස්ටටෝරයේ ප්රතිවිරුද්ධ ධ්රැව එකිනෙකට ප්රතිවිරුද්ධව ස්ථානගත වන පරිදි රෝටරය පිහිටීම වෙනස් කරයි. භ්රමකයේ අඛණ්ඩ භ්රමණය සහතික කිරීම සඳහා, දඟර විකල්ප ලෙස මාරු කරනු ලැබේ.
ප්රායෝගිකව ඒවා භාවිතා වේ විවිධ ක්රමස්ටෝරර් වංගු හතරට විදුලිය සැපයීම. බොහෝ විට, පූර්ණ-පියවර හෝ අර්ධ-පියවර මෙහෙයුම් ආකාර සමඟ යුගල සම්බන්ධතා භාවිතා වේ. සම්පූර්ණ පියවර මාදිලියේදී, දඟර යුගල දෙකක මාරු කළ හැකි චුම්බක ක්ෂේත්රයේ භ්රමණය වන ධ්රැව දෙකක් සහිත රෝටර්, ස්ථාන හතරක් අල්ලා ගත හැකිය (රූපය 8).

අර්ධ-පියවර මෙහෙයුම් මාදිලිය ඔබට ද්විත්ව ස්ථානගත කිරීමේ නිරවද්යතාව සහ ස්ථාන අටක් ලබා ගැනීමට ඉඩ සලසයි (රූපය 9). එය ක්රියාත්මක කිරීම සඳහා, දඟර හතරේම එකවර බලගැන්වීම සමඟ අතරමැදි පියවරක් එකතු කරනු ලැබේ.

මයික්රොස්ටෙප් ප්රකාරය ඔබට අතරමැදි ස්ථාන ගණන සහ ස්ථානගත කිරීමේ නිරවද්යතාවය සැලකිය යුතු ලෙස වැඩි කිරීමට ඉඩ සලසයි. මයික්රොස්ටෙප් කිරීමේ අදහස වන්නේ දඟර සඳහා යෙදීමයි ස්ටෙපර් මෝටරයස්ටෙප් සයිනසයිඩ් හැඩයට සමාන අඛණ්ඩ සංඥාවක ස්පන්දන පාලන වෙනුවට (රූපය 10). මෙම අවස්ථාවේ දී, සම්පූර්ණ පියවර කුඩා මයික්රොස්ටෙප් වලට බෙදී ඇති අතර, භ්රමණය වඩාත් සුමට වේ. Microstepping මාදිලිය ඔබට වඩාත් නිවැරදි ස්ථානගත කිරීම ලබා ගැනීමට ඉඩ සලසයි. මීට අමතරව, මෙම මාදිලියේදී, ස්ටෙපර් මෝටරවල ආවේනික නිවාසවල කම්පනය සැලකිය යුතු ලෙස අඩු වේ.

ස්ටෙපර් මෝටර වල වාසි:
- භ්රමණ වේගය සහ ස්ථානගත කිරීමේ පාලන පරිපථ නොමැති වීම හේතුවෙන් අඩු පිරිවැය;
- ඉහළ ස්ථානගත කිරීමේ නිරවද්යතාව;
- පුළුල් පරාසයක භ්රමණ වේගය;
- ඩිජිටල් පාලක සමඟ සරල පාලන අතුරුමුහුණත;
- ඉතා ඉහළ විශ්වසනීයත්වය;
- හොඳ රඳවා ගැනීමේ මොහොත.
ස්ටෙපර් මෝටර භාවිතා කිරීමේ විශේෂාංග:
- SD අනුනාදයේ සංසිද්ධිය මගින් සංලක්ෂිත වේ;
- ප්රතිපෝෂණ නොමැතිකම හේතුවෙන්, ස්ථාන පාලනය නැති විය හැකිය;
- බරක් නොමැතිව ක්රියාත්මක වන විට පවා බලශක්ති පරිභෝජනය අඩු නොවේ;
- එය වැඩ කිරීමට ඉතා අපහසු වේ අධි වේග;
- අඩු බල ඝනත්වය;
- තරමක් සංකීර්ණ පාලන යෝජනා ක්රමය.
විදුලි මෝටර් පාලනය සඳහා සාම්ප්රදායික විසඳුම්
නවීන නිරවද්ය DC මෝටර් පාලන පද්ධතියකට දත්ත සැකසීම සඳහා ක්ෂුද්ර පාලකයක් සහ මෝටර් පාලන ඒකකයක් ඇතුළත් වේ, එය බොහෝ විට ධාවකයක් ලෙස හැඳින්වේ. ධාවකයට කේතනය කළ පණිවිඩ ඩිජිටල් පාලන සංඥා බවට පරිවර්තනය කිරීම සඳහා තාර්කික පරිපථයක් ඇතුළත් වන අතර, ක්ෂේත්ර-ප්රයෝග ට්රාන්සිස්ටර (FETs) මත පදනම් වූ බල ස්විචයන් පාලනය කිරීම සඳහා ගේට් ඩ්රයිවර් බ්ලොක් තුළ ප්රතිසම සංඥා ජනනය වේ. FETs ධාවකයේ කොටසක් විය හැකිය හෝ වෙනම බ්ලොක් එකක තැබිය හැකිය. මීට අමතරව, රියදුරුට එන්ජින් ක්රියාකාරිත්වය පාලනය කිරීම සඳහා බල පරිපථ ආරක්ෂණ පරිපථ සහ ප්රතිපෝෂණ පරිපථ ඇතුළත් වේ.
රූප සටහන 11 මඟින් ඒකාබද්ධ සහ පෙර-ධාවක සඳහා බ්ලොක් රූප සටහන් විකල්පයන් පෙන්වයි. සෑම විසඳුමකටම තමන්ගේම වාසි සහ ලක්ෂණ ඇත. පෙර රියදුරු සැලකිය යුතු ලෙස වැඩි දියුණු කර ඇත උෂ්ණත්ව පාලන තන්ත්රය, සම්බන්ධිත එන්ජිමේ බලයට අනුකූලව බාහිර බල ස්විචයන් තෝරා ගැනීමට ඔබට ඉඩ සලසයි. සම්පූර්ණ විශේෂාංග සහිත ඒකාබද්ධ ධාවකයක් ඔබට වඩාත් සංයුක්ත පාලන පද්ධති නිර්මාණය කිරීමට ඉඩ සලසයි, බාහිර සම්බන්ධතා අවම කරයි, නමුත් අවශ්ය උෂ්ණත්ව තත්ත්වයන් සහතික කිරීම වඩාත් අපහසු වේ.

මේ අනුව, ඒකාබද්ධ TI ධාවකයට උපරිමයක් ඇත වැඩ කරන උෂ්ණත්වය තනි මූලද්රව්යපුවරුවේ 193 ° C දක්වා ළඟා විය හැකිය, නමුත් පෙර රියදුරු සඳහා මෙම අගය 37 ° C නොඉක්මවිය යුතුය.

මෝටර් වංගු මාරු කිරීම සඳහා වඩාත් පොදු පරිපථයක් වන්නේ "H" පාලමයි. පරිපථයේ නම සම්බන්ධතා වින්යාසයට සම්බන්ධ වන අතර එය “H” අකුර මෙන් පෙනේ. මෙය ඉලෙක්ට්රොනික පරිපථයබර පැටවීමේ ධාරාවේ දිශාව පහසුවෙන් වෙනස් කිරීමට සහ ඒ අනුව, රෝටරයේ භ්රමණය වන දිශාව පහසුවෙන් වෙනස් කිරීමට ඔබට ඉඩ සලසයි. පාලම් ට්රාන්සිස්ටර හරහා එතීෙම් සඳහා යොදන වෝල්ටීයතාවය PWM භාවිතයෙන් නියත හෝ මොඩියුලේට් කළ හැක. H-පාලම අදහස් කරන්නේ, පළමුවෙන්ම, මෝටර් බල සැපයුමේ ධ්රැවීයතාව වෙනස් කිරීමට - ප්රතිලෝම (රූපය 12), නමුත් දඟර වල පර්යන්ත කෙටි පරිපථයකින් භ්රමණය මන්දගාමී කිරීමට ඔබට ඉඩ සලසයි (රූපය 13).

වැදගත්ම ලක්ෂණය බලශක්ති මූලද්රව්යඅද බොහෝ විට පරිවරණය කරන ලද ගේට්ටුවක් සහිත ක්ෂේත්ර ආචරණ ට්රාන්සිස්ටර භාවිතා කරන පාලම, ට්රාන්සිස්ටරයේ ප්රභවය සහ කාණු අතර විවෘත නාලිකාවේ ප්රතිරෝධක අගය වේ - RDSON. RDSON අගය බොහෝ දුරට ඒකකයේ තාප ලක්ෂණ සහ බලශක්ති පාඩු තීරණය කරයි. උෂ්ණත්වය වැඩි වන විට, RDSON ද වැඩි වන අතර, වංගු මත ධාරාව සහ වෝල්ටීයතාව අඩු වේ.
PWM පාලන සංඥා භාවිතයෙන් ව්යවර්ථ රැළි අඩු කර මෝටර් රෝටරයේ සුමට භ්රමණය සහතික කළ හැකිය. ඉතා මැනවින්, ධ්වනි ශබ්දය වළක්වා ගැනීම සඳහා PWM සංඛ්යාතය 20 kHz ට වඩා වැඩි විය යුතුය. නමුත් සංඛ්යාතය වැඩි වන විට, මාරු කිරීමේ ක්රියාවලියේදී පාලම් ට්රාන්සිස්ටරවල පාඩු වැඩි වේ.
වංගු ආකාරයෙන් බර පැටවීමේ ප්රේරක ගුණාංග නිසා, එහි ඇති ධාරාවේ හැඩය යොදන ලද PWM වෝල්ටීයතාවයේ හැඩයට අනුරූප නොවේ. වෝල්ටීයතා ස්පන්දනයක් යෙදීමෙන් පසු, ධාරාව ක්රමයෙන් වැඩි වන අතර, විරාම වලදී, දඟර වල පිටුපස-EMF ඇතිවීම හේතුවෙන් ධාරාව ක්රමයෙන් මැකී යයි. වත්මන් ප්රස්ථාරයේ වක්රයේ බෑවුම, ස්පන්දනවල විස්තාරය සහ සංඛ්යාතය මෝටරයේ කාර්ය සාධන ලක්ෂණ වලට බලපායි (ව්යවර්ථ රැල්ල, ශබ්දය, බලය, ආදිය).
පසුපස-ඊඑම්එෆ් ආචරණයෙන් උද්යෝගිමත් වන ධාරාවේ විදුලි මෝටරවල දඟර වල දුර්වල වීම වේගවත් කිරීම සඳහා, ඩයෝඩ ප්රතිලෝම සම්බන්ධතාවේදී භාවිතා කරයි, ට්රාන්සිස්ටරවල කාණු-ප්රභව සංක්රාන්ති වසා දමයි, නැතහොත් කාණු ප්රභව සංක්රාන්ති හරහා එතීෙම් කෙටි පරිපථයකි. ට්රාන්සිස්ටර දෙකකින් පාලමේ විවිධ අත්වල එකවර සම්බන්ධ කර ඇත. රූපය 13 පාලමේ අවස්ථා තුනක් පෙන්වයි: වැඩ කිරීම, වේගවත් තිරිංග (Fast Decay) සහ මන්දගාමී තිරිංග (Slow Decay).
වඩාත් ඵලදායී වන්නේ ඒකාබද්ධ මාදිලිය (මිශ්ර ක්ෂය වීම) ලෙස සැලකේ, එහි ක්රියාකාරී ස්පන්දන අතර විරාමයේදී, ට්රාන්සිස්ටරවල කාණු ප්රභවය වසා දමන ඩයෝඩ පළමුව ක්රියාත්මක වන අතර පසුව එහි පහළ අත්වල ට්රාන්සිස්ටර ක්රියා කරයි. පාලම සක්රිය කරන්න.
TI මෝටර් පාලන විසඳුම්
TI හි අර්ධ සන්නායක සංරචක වලට DC මෝටර පාලනය කිරීම සඳහා පුළුල් පරාසයක විවිධ ධාවක ඇතුළත් වේ. ඒ සියල්ලටම අවම බාහිර සංරචක අවශ්ය වන අතර, 60 V දක්වා ක්රියාකාරී වෝල්ටීයතාවයකින් යුත් මෝටර පාලනය කිරීම සඳහා සංයුක්ත විසඳුම් නිර්මාණය කිරීමට ඔබට ඉඩ සලසයි, වැඩි විශ්වසනීයත්වයක් මගින් සංලක්ෂිත වේ, සහ විදුලි මෝටර් ඩ්රයිව් පද්ධතිවල ඉක්මන් හා සරල සැලසුමක් සපයයි.
රියදුරන් තුළ ගොඩනගා ඇති බුද්ධිමත් විශේෂාංග සඳහා අවම බාහිර ක්ෂුද්ර පාලක (MCU) සහය අවශ්ය වේ, උසස් වංගු මාරු කිරීමේ හැකියාවන් සැපයීම සහ බාහිර සංවේදක සහ ඩිජිටල් පාලන ලූප සඳහා සහාය වේ. ආරක්ෂිත කාර්යයන් සමූහයට සැපයුම් වෝල්ටීයතාව සීමා කිරීම, අධි ධාරා සහ කෙටි පරිපථයට එරෙහිව ආරක්ෂාව, අඩු වෝල්ටීයතාවය සහ මෙහෙයුම් උෂ්ණත්වය වැඩි කිරීම ඇතුළත් වේ.
TI ධාවකයන්ගේ සම්පූර්ණ පරාසය කොටස් තුනකට බෙදා ඇත: stepper, brushed සහ brushless DC මෝටර්. ඒ සෑම එකක් තුළම සමාගමේ වෙබ් අඩවිය ක්රියාත්මක වේ පහසු පද්ධතියපරාමිති ගණනාවක් මත පදනම්ව තේරීම. මෝටර් සමඟ භාවිතා කිරීම සඳහා නිර්මාණය කර ඇති වෙනම ධාවක තිබේ විවිධ වර්ග.
Stepper Motors සඳහා TI ධාවකයන්
TI හි විශාල මෝටර් පාලන විසඳුම් කළඹට මෝටර් රියදුරන් (Figure 14) ඇතුළත් වේ, ඒවා FET මත පදනම් වූ බල ස්විචයන් සහ පරිශීලකයාට අවශ්ය බල ස්විචයන් තෝරාගැනීම සඳහා පෙර-ධාවක ලෙස ලබා ගත හැකිය. සමස්තයක් වශයෙන්, සමාගමේ මාදිලි පරාසය SD සඳහා ධාවක 35 කට වඩා ඇතුළත් වේ.

TI පිරිනැමේ පුළුල් තේරීමබොහෝ නවීන විසඳුම්චලන පාලනය සහ නිවැරදි ස්ථානගත කිරීම සඳහා මයික්රොස්ටෙපිං පාලන පරිපථ භාවිතා කරමින් පුළුල් පරාසයක වෝල්ටීයතාවයක් සහ ධාරාවක් හරහා මෝටර් වලට සුමට චලනයක් සපයයි.
වෙනම රියදුරන්, එක් පාලන පාලකයක් භාවිතා කරමින්, ඔබට එකවර මෝටර දෙකක් පාලනය කිරීමට ඉඩ සලසයි, මේ සඳහා FET මත පදනම් වූ පාලම් හතරක් ඇත. DRV8834 වැනි බිල්ට්-ඉන් FET සහිත ධාවක ඇත, ඒවා ස්ටෙපර් මෝටර් වංගු දෙකක් ධාවනය කිරීමට සම්බන්ධ කළ හැකි හෝ DC මෝටර දෙකක් ධාවනය කිරීමට එකම පින් භාවිතා කළ හැකිය (රූපය 15).

රොටරය වඩාත් සුමට ලෙස චලනය කිරීම සඳහා, ස්ටෙපර් මෝටර සඳහා රියදුරන් ධාරා ස්පන්දන සුමට කිරීම සඳහා අභිරුචිකරණය කළ හැකි යාන්ත්රණයක් භාවිතා කරයි (මන්දගාමී, වේගවත්, මිශ්ර ක්ෂය මාදිලි). මයික්රොස්ටෙප් ගණනය කිරීමේ පද්ධතිය පහත දැක්වෙන වර්ග විය හැක:
- රියදුරු තුළට ගොඩනගා ඇත;
- බාහිර යොමු සංඥාවක් භාවිතා කිරීම.
මයික්රොස්ටෙප් චලනය සඳහා රියදුරන්ට බාහිර පාලකයක් අවශ්ය නොවේ , සහ . මෙහිදී, චලන පියවර සහ වංගු මාරු කිරීමේ ඇල්ගොරිතම ගණනය කරනු ලබන්නේ ධාවකය තුලට ගොඩනගා ඇති පරිපථයකිනි.
BDC සඳහා TI ධාවකයන්
රිය පැදවීම සඳහා - කොමියුටේටර් විදුලි මෝටර DC - රියදුරන්ගේ විශේෂ පවුලක් අදහස් කරන අතර, ඒවායේ නියෝජිතයින් ගණනාවක් රූප සටහන 16 හි පෙන්වා ඇත. ඔවුන් සපයයි සම්පූර්ණ ආරක්ෂාවඅතිරික්ත වෝල්ටීයතාවයෙන් සහ ධාරාව, කෙටි පරිපථය සහ උනුසුම් වීම. පාලන අතුරුමුහුණත් හැකියාවන්ට ස්තූතිවන්ත වන අතර, මෙම ධාවකයන් මෝටර් රථවල සරල හා කාර්යක්ෂම ක්රියාකාරිත්වය සක්රීය කරයි. පරිශීලකයින්ට තනි චිපයක් භාවිතයෙන් 1.8 ... 60 V මෙහෙයුම් වෝල්ටීයතාවයක් සහිත මෝටර් එකක් හෝ කිහිපයක් පාලනය කළ හැකිය.

පවුලේ රියදුරන් ඒකාබද්ධ බල ස්විචයන් සහ පෙර රියදුරන් ලෙස ලබා ගත හැකිය. ඔවුන්ට අවම වශයෙන් අමතර සංරචක අවශ්ය වේ, සංයුක්ත විසඳුම් ලබා දීම, සංවර්ධන කාලය අඩු කිරීම සහ නව නිෂ්පාදන ඉක්මනින් වෙළඳපොළට නිකුත් කිරීමට ඔබට ඉඩ සලසයි.
නිද්රා මාදිලිය අක්රිය වූ විට බලශක්ති පරිභෝජනය අවම කරන අතර එන්ජිම ආරම්භ වන විට වේගවත් සක්රිය කිරීමක් සපයයි. භ්රමණ වේගය පාලනය කිරීම සඳහා, භ්රමණ දිශාව තෝරා ගැනීමට සහ ප්රතිදාන පාලම් ස්විච ක්රියාත්මක කිරීමට බාහිර PWM සංඥා හෝ PHASE/ENABLE සංඥා භාවිතා කළ හැක.
නිමැවුම් පාලම් හතරක් තිබීම, රියදුරුට SPI පාලන අතුරුමුහුණත භාවිතයෙන් මෝටර් දෙකක්, හෝ එක් මෝටරයක් සහ BDC දෙකක් හෝ BDC හතරක් පාලනය කිරීමට හැකියාව ඇත.
රූප සටහන 17 පෙන්වයි ක්රියාකාරී රූප සටහනඑක් බුරුසු මෝටරයක් පාලනය කිරීමට සරල ධාවකයක්.

BLDC සඳහා TI රියදුරන්
TI's brushless motor drivers, or BLDCs, integrated power bridge එකක් හෝ බාහිර බල ට්රාන්සිස්ටර භාවිතා කළ හැක. 3-phase පාලන සංඥා උත්පාදනය කිරීම සඳහා පරිපථය බාහිර හෝ ගොඩනඟා ගත හැකිය.
රියදුරු පවුල පාලනය කරන්න බුරුසු රහිත විදුලි මෝටරවිවිධ පාලන මූලධර්ම සහ විවිධ ව්යවර්ථ සහිත ආකෘති ඇතුළත් වේ. මෙම ධාවකයන් සපයයි විවිධ මට්ටම් BDLC ධාවනය කරන විට ශබ්දය, භාවිතා කිරීමට සුදුසුය කාර්මික උපකරණ, මෝටර් රථ පද්ධතිසහ වෙනත් තාක්ෂණය. සහතිකයක් සඳහා විශ්වසනීය මෙහෙයුමවිදුලි මෝටර, රියදුරන් අධි ධාරාව, වෝල්ටීයතාවය සහ උෂ්ණත්වයට එරෙහිව පුළුල් ආරක්ෂණ කට්ටලයක් සපයයි. TI හි පුළුල් සහ වර්ධනය වන නිෂ්පාදන පෙළෙහි 3-phase BLDC ධාවක කිහිපයක් පමණක් රූප සටහන 18 පෙන්වයි.

භ්රමණය වන භ්රමකයේ වත්මන් තත්ත්වය නිරීක්ෂණය කිරීම සඳහා, විවිධ වර්ගවල බාහිර සංවේදක හෝ පාලක පරිපථය පිටුපස EMF (Back Electromotive Force, BEMF) අගය අනුව රෝටර් තත්ත්වය තීරණය කිරීම සඳහා භාවිතා කළ හැක.
පාලනය PWM, ඇනලොග් සංඥා හෝ සම්මත ඩිජිටල් අතුරුමුහුණත් භාවිතයෙන් සිදු කළ හැක. භ්රමණය වන පාලනය සඳහා වින්යාසගත කළ හැකි පරාමිති කට්ටල අභ්යන්තර වාෂ්පශීලී නොවන මතකයේ ගබඩා කළ හැක.
250 mOhm පමණක් වන විවෘත නාලිකා ප්රතිරෝධයක් සහිත ක්ෂේත්ර-ප්රයෝග ට්රාන්සිස්ටර මත සවි කර ඇති බල ස්විචයන් සමඟ 40 ... 125 ° C පුළුල් උෂ්ණත්ව පරාසයක ක්රියාත්මක වන BLDC සඳහා බුද්ධිමත් ධාවකයක් රූප සටහන 19 පෙන්වයි. 8 ... 28 V මෙහෙයුම් වෝල්ටීයතා පරාසයක් සහිතව, රියදුරුට නාමික ධාරාව 2 A සහ 3 A උපරිම ධාරාවක් සැපයිය හැකිය.

රියදුරුට රෝටර් පිහිටීම නිරීක්ෂණය කිරීමට බාහිර සංවේදකයක් අවශ්ය නොවේ, නමුත් මෝටරය මගින් පරිභෝජනය කරන බලය නිරීක්ෂණය කිරීමට බාහිර ප්රතිරෝධයක් භාවිතා කළ හැකිය. එය පොරොත්තු ප්රකාරයේදී 3 mA පමණක් අඩු බල පරිභෝජනයක් දක්වයි. තවද ආකෘතියේ මෙම අගය 180 μA මට්ටමට ගෙන එනු ලැබේ.
බිල්ට් I2C අතුරුමුහුණත මගින් රෝග විනිශ්චය සහ වින්යාස කිරීම, තාර්කික පරිපථ මෙහෙයුම් පාලන රෙජිස්ටර් වෙත ප්රවේශය සහ EEPROM මතකයේ ගබඩා කර ඇති ධාවක මෙහෙයුම් පැතිකඩ සපයයි.
අධි ධාරා සහ අඩු වෝල්ටීයතාවකදී මෝටරය නතර වන බව උසස් ආරක්ෂණ ක්රියාකාරකම් මාලාවක් සහතික කරයි. ආදාන වෝල්ටීයතා සීමාව සපයනු ලැබේ. බාහිර ප්රතිරෝධකයක් භාවිතයෙන් තොරව අධි ධාරා ආරක්ෂණය ක්රියා කරයි. ආරක්ෂාව භාවිතා කිරීම සඳහා ක්රම විශේෂ රෙජිස්ටර් හරහා වින්යාස කර ඇත.
නිගමනය
විවිධ උපකරණවල විදුලි මෝටර වැඩි වැඩියෙන් භාවිතා වන අතර, වැඩිදියුණු වෙමින් පවතින අතර නව හැකියාවන් ලබා ගනී, බොහෝ දුරට ස්තුති නවීන පද්ධතිවිදුලි ධාවකය.
Texas Instruments's semiconductor portfolio හි සියලු වර්ගවල DC මෝටර පාලනය කිරීම සඳහා පුළුල් පරාසයක ධාවක IC ඇතුළත් වේ. ඒවා මත පදනම්ව, පුළුල් පරාසයක ධාරා සහ වෝල්ටීයතාවයකින් ක්රියාත්මක වන ධාවකයන් නිර්මාණය කිරීම සඳහා නිරවද්යතාවය, බලය සහ ක්රියාකාරීත්වය සඳහා වන අවශ්යතා අනුව සමාගම පරිමාණ විසඳුම් ලබා දෙයි, සම්පූර්ණ පරාසයක ආරක්ෂාවක් සහිත බුරුසු, බුරුසු රහිත සහ ස්ටෙපර් මෝටරවල විශ්වාසදායක සහ පහසු ක්රියාකාරිත්වය සහතික කරයි. ධාරාව, වෝල්ටීයතාවය සහ උෂ්ණත්වය සඳහා.
ට්රාන්සිස්ටර ස්ටෙපර් මෝටර් ධාවකය
"KT" ශ්රේණියේ බයිපෝලර් ට්රාන්සිස්ටර මත පදනම් වූ බයිපෝලර් ස්ටෙපර් මෝටර් ධාවකයක් මම ඔබේ අවධානයට ඉදිරිපත් කරමි.
රියදුරු විමෝචක අනුගාමික මූලධර්මය මත ක්රියා කරයි. KT315 ට්රාන්සිස්ටරය මත එකලස් කර ඇති විස්තාරණ අදියර වෙත පාලන සංඥාව සපයනු ලැබේ. එවිට එය KT815 සහ KT 814 යන අනුපූරක යුගලයෙන් N පාලමට වදියි.
ක්ෂුද්ර පාලකයේ වත්මන් ප්රතිදානය ප්රමාණවත් නොවන නිසා විස්තාරණ අදියරක් අවශ්ය වේ  විවෘත බල ට්රාන්සිස්ටර. බල ට්රාන්සිස්ටර වලින් පසුව, මෝටරයේ ස්වයං ප්රේරණය අඩු කිරීම සඳහා ඩයෝඩ ස්ථාපනය කර ඇත.
විවෘත බල ට්රාන්සිස්ටර. බල ට්රාන්සිස්ටර වලින් පසුව, මෝටරයේ ස්වයං ප්රේරණය අඩු කිරීම සඳහා ඩයෝඩ ස්ථාපනය කර ඇත.
පරිපථය 3 කින් 0.1 μF සහ 1 සිට 100 μF ධාරිත්රක ආකාරයෙන් ශබ්ද මර්දනය සඳහා ද සපයයි. ධාවකය වොට් 150 සීඩී ඩ්රයිව් මෝටරයක් සමඟ වැඩ කිරීමට සැලසුම් කර ඇති බැවින්, ට්රාන්සිස්ටර සිසිලනය නොවේ

ට්රාන්සිස්ටර ධාවකයකට සම්බන්ධ CD ධාවකයකින් ස්ටෙපර් මෝටරය
ස්ථාපනය කර ඇත, නමුත් ට්රාන්සිස්ටර KT814 සහ KT815 හි උපරිම විමෝචක ධාරාව 1.5 A වේ, මෙම ධාවකයට ඊටත් වඩා බලවත් මෝටර හැරවිය හැකිය. මෙය සිදු කිරීම සඳහා, ඔබ බල ට්රාන්සිස්ටර මත සිසිලන තහඩු ස්ථාපනය කළ යුතුය.
- Bipolar stepper motors සාපේක්ෂව මිල අධික වුවද, ඒවායේ භෞතික ප්රමාණය සඳහා ඉහළ ව්යවර්ථයක් සපයයි. කෙසේ වෙතත්, මෝටර් වංගු දෙක සඳහා H-පාලම් හතරකට සම්බන්ධ කර ඇති පාලන ට්රාන්සිස්ටර අටක් අවශ්ය වේ. සෑම ට්රාන්සිස්ටරයක්ම අධි බර සහ කෙටි පරිපථ වලට ඔරොත්තු දිය යුතු අතර ඉක්මනින් ක්රියාකාරීත්වය යථා තත්වයට පත් කළ යුතුය. සහ රියදුරු, ඒ අනුව, විශාල සංඛ්යාවක් සහිත සංකීර්ණ ආරක්ෂණ පරිපථ අවශ්ය වේ උදාසීන සංරචක.

පින්තූරය 1
රූපය 1. පෘෂ්ඨීය සවි කිරීමේ පැකේජයක ඇති තනි IC සහ නිෂ්ක්රීය සංරචක කිහිපයකට බයිපෝලර් ස්ටෙපර් මෝටරයක් ධාවනය කළ හැකිය.
Bipolar Stepper Motor Control
DIY ස්ටෙපර් මෝටර් රියදුරු- Maxim's Class D ශ්රව්ය ඇම්ප්ලිෆයර් මත පදනම් වූ විකල්ප මෝටර් ධාවක පරිපථයක් රූප සටහන 1 හි දැක්වේ. කුඩා මතුපිට සවිකිරීමේ පැකේජයක ඇති MAX9715 චිපයට සාමාන්ය 4 හෝ 8 ohm බරකට 2.8 W දක්වා බලයක් ලබා දිය හැක. ක්ෂුද්ර පරිපථයේ ප්රතිදානයන් දෙකෙන් එකක් සෑදී ඇත්තේ ප්රබල MOSFET වලින් සාදන ලද H-පාලම් වලින් වන අතර, පිළිවෙලින් ස්ටෙපර් මෝටරයේ A සහ B වංගු වලට සම්බන්ධ කර ඇති OUTR+, OUTR- සහ OUTL+, OUTL- යන රේඛා යුගල පාලනය කරයි. සෑම යුගලයක්ම 1.22 MHz නාමික මාරුවීම් සංඛ්යාතයක් සහිත අවකල පළල මොඩියුලේටඩ් ස්පන්දන සංඥාවක් ජනනය කරයි. පරිපථය මගින් ජනනය වන අඩු මට්ටමේ ශබ්දය නිමැවුම් පෙරහන් සඳහා අවශ්යතාවය ඉවත් කරයි.
ධාරිත්රක විසන්ධි කිරීම
ධාරිත්රක C1, C3, C4 සහ C6 බලය සහ පක්ෂග්රාහී ආදාන සඳහා විසංයෝජනයන් ලෙස සේවය කරන අතර C5 සහ C7 අධි බලැති පන්තියේ D ප්රතිදාන ඇම්ප්ලිෆයර් සඳහා ගබඩා ක්රියාකාරකම් සපයන අතර C8 සහ C9 ඇම්ප්ලිෆයර් කලාප පළල 16 Hz දක්වා සීමා කරයි. සහ L3 දිගු කේබල් වලින් විදුලි බාධා අඩු කරයි. U-හැඩැති පෙරහන C1, C2, L1 IC1 චිපයේ බල ආදානයේදී ශබ්දය යටපත් කරයි. එන්ජිමේ දකුණු සහ වම් නාලිකා පාලනය කරන Step_A සහ Step_B ක්ෂුද්ර පරිපථවල ආදාන සංඥා, ඕනෑම සුදුසු පාලකයක් මඟින් ජනනය කළ හැක. අභ්යන්තර පරිපථ මඟින් ඇම්ප්ලිෆයර් කෙටි පරිපථවලින් සහ එහි පර්යන්තවල වැරදි සම්බන්ධතාවයක් හෝ වැරදි ස්ටෙපර් මෝටරයක් සහිත වූ විට අධික උනුසුම් වීමෙන් ආරක්ෂා කරයි.

වගුව 1
ස්පන්දන අනුපිළිවෙල නිදර්ශනය
0 සිට 4 දක්වා සංඥා සංයෝජන අඛණ්ඩව යෙදීමෙන් එක් දිශාවකට සාමාන්ය ස්ටෙපර් මෝටරයක භ්රමණය පාලනය කරන Step_A සහ Step_B ස්පන්දන අනුපිළිවෙල වගුව 1 මගින් නිරූපණය කරයි. පියවර 4 මගින් මෝටර් පතුවළ නැවත ලබා දෙයි. ආරම්භක ස්ථානය, 360° භ්රමණයක් සම්පූර්ණ කිරීම. මෝටරයේ භ්රමණ දිශාව වෙනස් කිරීම සඳහා, මේසයේ පතුලේ සිට ස්පන්දනවල කාල සටහනක් සෑදීම ආරම්භ කර එය දිගේ අඛණ්ඩව ඉහළට ගෙන යන්න. microcircuit (pin 8) හි SHDN ආදානයට අඩු තාර්කික මට්ටමේ වෝල්ටීයතාවයක් යෙදීමෙන්, ඔබට ඇම්ප්ලිෆයර් නාලිකා දෙකම අක්රිය කළ හැකිය. පරිපථයේ ආදාන සහ ප්රතිදාන වල තරංග ආකෘති රූප සටහන 2 හි දැක්වේ.
න්යාය සහ ධාවක වර්ග පිළිබඳ කෙටි හැඳින්වීමක්, ස්ටෙපර් මෝටරයක් සඳහා ප්රශස්ත ධාවකයක් තෝරා ගැනීම පිළිබඳ උපදෙස්.
ඔයාට අවශ්ය නම්Stepper motor driver මිලදී ගන්න , දකුණු පස ඇති තොරතුරු සපයන්නා මත ක්ලික් කරන්න
ඔබට උපකාර විය හැකි සමහර තොරතුරු ස්ටෙපර් මෝටර් ධාවකය තෝරන්න.
ස්ටෙපර් මෝටරය - මෝටරය සමඟ සංකීර්ණ පරිපථයවිශේෂ අවශ්ය කළමනාකරණය ඉලෙක්ට්රොනික උපාංගය- ස්ටෙපර් මෝටර් රියදුරු. ස්ටෙපර් මෝටර් ධාවකය එහි ආදානයේදී STEP/DIR තාර්කික සංඥා ලබා ගනී, ඒවා සාමාන්යයෙන් ඉහළ සහ අඩු මට්ටමසමුද්දේශ වෝල්ටීයතාව 5 V, සහ ලැබුණු සංඥා වලට අනුකූලව මෝටර් එතුම් වල ධාරාව වෙනස් කරයි, දී ඇති කෝණයකින් සුදුසු දිශාවට භ්රමණය වීමට පතුවළට බල කරයි. >STEP/DIR සංඥා උත්පාදනය කරනු ලබන්නේ CNC පාලකයක් හෝ Mach3 හෝ LinuxCNC වැනි පාලන වැඩසටහනක් ක්රියාත්මක කරන පුද්ගලික පරිගණකයක් මගිනි.
රියදුරුගේ කාර්යය වන්නේ වංගු වල ධාරාව හැකිතාක් කාර්යක්ෂමව වෙනස් කිරීම වන අතර, දෙමුහුන් ස්ටෙපර් මෝටරයේ දඟර වල ප්රේරණය සහ රෝටරය නිරන්තරයෙන් මෙම ක්රියාවලියට බාධා කරන බැවින්, රියදුරන් ඒවායේ ලක්ෂණ සහ ප්රතිඵලයේ ගුණාත්මකභාවය අනුව බෙහෙවින් වෙනස් වේ. චලනය. වංගු වල ගලා යන ධාරාව රොටරයේ චලනය තීරණය කරයි: ධාරාවේ විශාලත්වය ව්යවර්ථය සකසයි, එහි ගතිකතාවය ඒකාකාරිත්වයට බලපායි.
SD ධාවක වර්ග (වර්ග).
වංගු වලට ධාරාව පොම්ප කිරීමේ ක්රමයට අනුව රියදුරන් වර්ග කිහිපයකට බෙදා ඇත:
1) නියත වෝල්ටීයතා ධාවකයන්
මෙම රියදුරන් විකල්ප වංගු සඳහා නියත වෝල්ටීයතා මට්ටමක් යොදයි, එහි ප්රතිඵලය වන ධාරාව එතීෙම් ප්රතිරෝධය මත සහ, අධික වේගයෙන්, ප්රේරණය මත රඳා පවතී. මෙම රියදුරන් අතිශයින්ම අකාර්යක්ෂම වන අතර ඉතා අඩු වේගයකින් පමණක් භාවිතා කළ හැකිය.
2) ද්වි-මට්ටමේ රියදුරන්
මෙම වර්ගයේ රියදුරන් තුළ, වංගු කිරීමේ ධාරාව මුලින්ම ඉහළ යයි අවශ්ය මට්ටමභාවිතා කිරීම මගින් අධි වෝල්ටීයතාවය, එවිට අධි වෝල්ටීයතා මූලාශ්රය අක්රිය කර ඇත, සහ අවශ්ය ශක්තියධාරාව අඩු වෝල්ටීයතා ප්රභවයක් මගින් ආධාරක වේ. එවැනි රියදුරන් බෙහෙවින් ඵලදායී වන අතර, අනෙකුත් දේ අතර ඔවුන් මෝටර් රථවල උණුසුම අඩු කරයි, සහ ඒවා තවමත් ඉහළ මට්ටමේ උපකරණවල දක්නට ලැබේ. කෙසේ වෙතත්, එවැනි ධාවකයන් සහාය වන්නේ පියවර සහ අර්ධ-පියවර මාදිලි සඳහා පමණි.
3) PWM සහිත රියදුරන්.
වර්තමානයේ, PWM ස්ටෙපර් මෝටර් රථ රියදුරන් වඩාත්ම ජනප්රිය වන්නේ වෙළඳපොලේ ඇති සියලුම ධාවකයන්ය. මෙම රියදුරන් ස්ටෙපර් මෝටර් වංගු කිරීමට ඉතා ඉහළ වෝල්ටීයතා PWM සංඥාවක් සපයන අතර එය ධාරාව ළඟා වන විට කපා හැරේ. අවශ්ය මට්ටම. කපා හැරීම සිදු වන වත්මන් අගය පොටෙන්ටියෝමීටරයකින් හෝ ඩීඅයිපී ස්විචයකින් සකසනු ලැබේ, සමහර විට මෙම අගය විශේෂ මෘදුකාංග භාවිතයෙන් වැඩසටහන්ගත කර ඇත. මෙම රියදුරන් තරමක් බුද්ධිමත් වන අතර විවිධාකාරයෙන් පැමිණේ අතිරේක කාර්යයන්, විවිධ පියවර බෙදීම් වලට සහාය වන අතර, චලනයෙහි විවික්ත ස්ථානගත කිරීම සහ සුමට බව වැඩි කිරීමට ඔබට ඉඩ සලසයි. කෙසේ වෙතත්, PWM ධාවකයන් ද එකිනෙකට වඩා බෙහෙවින් වෙනස් ය. සැපයුම් වෝල්ටීයතාවය සහ උපරිම සුළං ධාරාව වැනි එවැනි ලක්ෂණ වලට අමතරව, ඒවාට වෙනස් PWM සංඛ්යාතයක් ඇත. රියදුරු සංඛ්යාතය 20 kHz ට වඩා වැඩි නම් එය වඩා හොඳ වන අතර, සාමාන්යයෙන්, එය වැඩි නම්, වඩා හොඳය. 20 kHz ට අඩු සංඛ්යාත නරක අතට හැරේ රියදුරු කාර්ය සාධනයමෝටර සහ ඇසෙන පරාසයට වැටේ, ස්ටෙපර් මෝටර අප්රසන්න ශබ්දයක් නිකුත් කිරීමට පටන් ගනී. ස්ටෙපර් මෝටර් රියදුරන්, මෝටර අනුගමනය කරමින්, ඒක ධ්රැවීය සහ බයිපෝලර් ලෙස බෙදා ඇත. ආරම්භක යන්ත්ර මෙවලම් සාදන්නන්ට ඩ්රයිව් සමඟ අත්හදා බැලීම් නොකරන ලෙස තරයේ අවවාද කරනු ලැබේ, නමුත් ඔවුන්ට උපරිම තාක්ෂණික සහාය, තොරතුරු සහ වෙළඳපොලේ වඩාත් පුළුල් ලෙස නියෝජනය වන නිෂ්පාදන ලබා ගත හැකි ඒවා තෝරා ගැනීමට. බයිපෝලර් හයිබ්රිඩ් ස්ටෙපර් මෝටරවල රියදුරන් මේවාය.
ස්ටෙපර් මෝටර් ධාවකයක් තෝරා ගන්නේ කෙසේද (SM)
පළමු පරාමිතියඔබ ස්ටෙපර් මෝටර් ධාවකයක් තෝරා ගැනීමට තීරණය කරන විට අවධානය යොමු කළ යුතු දෙයක් වන්නේ රියදුරුට සැපයිය හැකි ධාරාවයි. රීතියක් ලෙස, එය තරමක් පුළුල් පරාසයක් තුළ නියාමනය කරනු ලැබේ, නමුත් තෝරාගත් ස්ටෙපර් මෝටරයේ අදියර ධාරාවට සමාන ධාරාවක් නිපදවිය හැකි එකක් ධාවකය තෝරා ගත යුතුය. ඇත්ත වශයෙන්ම, උපරිම ධාවක ධාරාව තවත් 15-40% වැඩි වීම යෝග්ය වේ. එක් අතකින්, ඔබට මෝටරයෙන් වැඩි ව්යවර්ථයක් ලබා ගැනීමට අවශ්ය නම් මෙය සංචිතයක් ලබා දෙනු ඇත, නැතහොත් අනාගතයේදී ඔබ තවත් ස්ථාපනය කරනු ඇත. බලවත් එන්ජිම, අනෙක් අතට, එය අධික නොවනු ඇත: නිෂ්පාදකයින් සමහර විට රේඩියෝ-ඉලෙක්ට්රොනික උපාංගවල ශ්රේණිගත කිරීම් විශේෂිත වර්ගයකට/ප්රමාණයේ මෝටරයකට “ගැලපීම” කරයි, එබැවින් NEMA 17 (මි.මී. 42) මෝටරයක් ධාවනය කරන අධික බලගතු 8 A ධාවකයකට හැකිය. , උදාහරණයක් ලෙස, අනවශ්ය කම්පන ඇති කරන්න.
දෙවන කරුණසැපයුම් වෝල්ටීයතාවය වේ. ඉතා වැදගත් සහ අපැහැදිලි පරාමිතියක්. එහි බලපෑම තරමක් බහුවිධ ය - සැපයුම් වෝල්ටීයතාවය ගතිකයට බලපායි (ව්යවර්ථය අධික වේගය), කම්පනය, එන්ජිම සහ රියදුරු රත් කිරීම. සාමාන්යයෙන් උපරිම ධාවක සැපයුම් වෝල්ටීයතාවය ආසන්න වශයෙන් වේ උපරිම ධාරාවමම 8-10 න් ගුණ කළා. උපරිම නිශ්චිත ධාවක සැපයුම් වෝල්ටීයතාවය මෙම අගයන්ගෙන් තියුනු ලෙස වෙනස් වේ නම්, එවැනි වෙනසක් සඳහා හේතුව කුමක්දැයි තවදුරටත් විමසීම වටී. මෝටරයේ ප්රේරණය වැඩි වන තරමට රියදුරුට අවශ්ය වෝල්ටීයතාවය වැඩි වේ. U = 32 * sqrt(L) අනුභූතික සූත්රයක් ඇත, මෙහි L යනු ස්ටෙපර් මෝටර් එතීමේ ප්රේරණය වේ. මෙම සූත්රයෙන් ලබාගත් U හි අගය ඉතා ආසන්න වේ, නමුත් එය ධාවකයක් තෝරාගැනීමේදී ඔබට සැරිසැරීමට ඉඩ සලසයි: U ධාවක සැපයුම් වෝල්ටීයතාවයේ උපරිම අගයට ආසන්න වශයෙන් සමාන විය යුතුය. ඔබ U 70 ට සමාන නම්, රියදුරන් EM706, AM882, YKC2608M-H මෙම නිර්ණායකය සමත් වේ.
තුන්වන පැතිකඩ- ඔප්ටෝ-හුදකලා යෙදවුම් තිබීම. කර්මාන්තශාලා වල නිපදවන සියලුම රියදුරන් සහ පාලකයන් තුළ, විශේෂයෙන් සන්නාමගත ඒවා, optocoupler අවශ්ය වේ, මන්ද රියදුරු බලශක්ති ඉලෙක්ට්රොනික උපකරණයක් වන අතර යතුර බිඳවැටීම මඟින් පාලන සංඥා සපයන කේබල් මත ප්රබල ආවේගයක් ඇති විය හැකි අතර දැවී යාම මිල අධික CNC පාලකයක. කෙසේ වෙතත්, ඔබ නුහුරු නුපුරුදු ආකෘතියක SD ධාවකයක් තෝරා ගැනීමට තීරණය කරන්නේ නම්, ඔබ අතිරේකව යෙදවුම් සහ ප්රතිදානවල opto-හුදකලා වීම පිළිබඳව විමසිය යුතුය.
හතරවන අංගය- අනුනාද මර්දන යාන්ත්රණ තිබීම. ස්ටෙපර් මෝටරයක අනුනාදය සෑම විටම පෙනෙන සංසිද්ධියකි, වෙනස අනුනාද සංඛ්යාතයේ පමණක් වන අතර එය මූලික වශයෙන් රඳා පවතින්නේ භාරයේ අවස්ථිති මොහොත, ධාවක සැපයුම් වෝල්ටීයතාවය සහ ස්ථාපිත බලයමෝටර් අදියර ධාරාව. අනුනාදයක් ඇති වූ විට, පතුවළ සම්පූර්ණයෙන්ම නතර වන තුරු, ස්ටෙපර් මෝටරය කම්පනය වීමට සහ ව්යවර්ථය නැති වීමට පටන් ගනී. අනුනාදනය මැඩපැවැත්වීම සඳහා, මයික්රොස්ටෙපිං සහ බිල්ට් අනුනාද වන්දි ඇල්ගොරිතම භාවිතා වේ. අනුනාදයෙන් දෝලනය වන ස්ටෙපර් මෝටරයක භ්රමකය වංගුවල ඇති ප්රේරිත emf හි ක්ෂුද්ර දෝලනය ජනනය කරයි, ඒවායේ ස්වභාවය සහ විස්තාරය අනුව රියදුරු අනුනාදයක් තිබේද සහ එය කෙතරම් ශක්තිමත්ද යන්න තීරණය කරයි. ලැබුණු දත්ත මත පදනම්ව, රියදුරු එකිනෙකාට සාපේක්ෂව නියමිත වේලාවට මෝටර් පියවර තරමක් මාරු කරයි - එවැනි කෘතිම අසමානතාවය අනුනාදයෙන් මට්ටම් කරයි. සියලුම Leadshine DM, AM සහ EM ශ්රේණි ධාවකයන් තුළ අනුනාද මර්දන යාන්ත්රණයක් ගොඩනගා ඇත. අනුනාද මර්දනය සහිත රියදුරන් උසස් තත්ත්වයේ රියදුරන් වන අතර, ඔබේ අයවැය එයට ඉඩ දෙන්නේ නම්, මේවා මිලදී ගැනීම වඩා හොඳය. කෙසේ වෙතත්, මෙම යාන්ත්රණය නොමැතිව වුවද, රියදුරු සම්පූර්ණයෙන්ම ක්රියා කරන උපාංගයක් ලෙස පවතී - විකුණන ලද රියදුරන්ගෙන් වැඩි ප්රමාණයක් - අනුනාද වන්දි නොමැතිව, නමුත් දස දහස් ගණනක් යන්ත්ර ලොව පුරා ගැටළු නොමැතිව ක්රියාත්මක වන අතර ඔවුන්ගේ කාර්යයන් සාර්ථකව ඉටු කරයි.
පස්වන අංගය- ප්රොටෝකෝල කොටස. ඔබට අවශ්ය ප්රොටෝකෝලය මත ධාවකය ක්රියාත්මක වන බවත්, ආදාන සංඥා මට්ටම් ඔබට අවශ්ය තාර්කික මට්ටම් සමඟ අනුකූල වන බවත් ඔබ සහතික කර ගත යුතුය. මෙම චෙක්පත පස්වන කරුණයි, මන්ද දුර්ලභ ව්යතිරේක සහිතව, රියදුරන්ගෙන් අතිමහත් බහුතරයක් STEP/DIR/ENABLE ප්රොටෝකෝලය භාවිතයෙන් ක්රියා කරන අතර 0..5 V සංඥා මට්ටම් සමඟ අනුකූල වේ, ඔබ සහතික විය යුතුය.
හයවන අංගය- ආරක්ෂිත කාර්යයන් තිබීම. අතිරික්ත සැපයුම් වෝල්ටීයතාවයෙන් ආරක්ෂා වීම, එතීෙම් ධාරාව (කෙටි පරිපථය එතීෙම් ඇතුළුව), සැපයුම් වෝල්ටීයතා ආපසු හැරවීම සහ ස්ටෙපර් ෙමෝටර් අදියරවල වැරදි සම්බන්ධ කිරීම ඇතුළත් වේ. එවැනි කාර්යයන් වැඩි වන තරමට වඩා හොඳය.
හත්වන අංගය- මයික්රොස්ටෙපිං මාදිලි තිබීම. දැන් සෑම රියදුරෙකුටම පාහේ බොහෝ මයික්රොස්ටෙප් මාදිලි ඇත. කෙසේ වෙතත්, සෑම රීතියකටම ව්යතිරේක පවතී, සහ Geckodrive ධාවකයන් තුළ ඇත්තේ එක් මාදිලියක් පමණි - 1/10 පියවර බෙදීම්. මෙයට පෙලඹෙන්නේ විශාල බෙදීම් වැඩි නිරවද්යතාවයක් ගෙන නොයෑමයි, එනම් ඒවා අවශ්ය නොවේ. කෙසේ වෙතත්, ප්රායෝගිකව පෙන්නුම් කරන්නේ මයික්රොස්ටෙප් කිරීම කිසිසේත් ප්රයෝජනවත් වන්නේ ස්ථානගත කිරීමේ හෝ නිරවද්යතාවයේ විචක්ෂණ භාවය වැඩි කිරීමෙන් නොව, පියවර බෙදීම විශාල වන තරමට මෝටර් පතුවළේ චලනය සුමට වන අතර අනුනාදයෙන් අඩු වීමෙනි. ඒ අනුව, අනෙකුත් සියලු දේ සමාන වන අතර, එය බෙදීම භාවිතා කිරීම වටී, වඩා හොඳය. උපරිම අවසර ලත් පියවර බෙදීම තීරණය කරනු ලබන්නේ ධාවක තුළ ගොඩනගා ඇති බ්රැඩිස් වගු මගින් පමණක් නොව, ආදාන සංඥා වල උපරිම සංඛ්යාතය මගිනි - නිදසුනක් ලෙස, 100 kHz ආදාන සංඛ්යාතයක් සහිත ධාවකයක් සඳහා භාවිතා කිරීමේ තේරුමක් නැත. 1/256 බෙදීම, භ්රමණ වේගය 100,000 / (200 * 256) * 60 = 117 rpm ට සීමා වනු ඇත, එය ස්ටෙපර් මෝටරයක් සඳහා ඉතා අඩුය. මීට අමතරව, පුද්ගලික පරිගණකයකට 100 kHz ට වඩා වැඩි සංඛ්යාතයක් සහිත සංඥා උත්පාදනය කිරීමේ අපහසුතාවයක් ද ඇත. ඔබ දෘඪාංග CNC පාලකයක් භාවිතා කිරීමට අදහස් නොකරන්නේ නම්, 100 kHz බොහෝ විට ඔබේ සිවිලිම වනු ඇත, එය 1/32 බෙදීමකට අනුරූප වේ.
අටවන අංගය- අතිරේක කාර්යයන් ලබා ගැනීමේ හැකියාව. ඒවායින් බොහොමයක් තිබිය හැකිය, උදාහරණයක් ලෙස, "අසාර්ථක" හඳුනාගැනීමේ කාර්යය - හදිසි නැවතුමස්ටෙපර් මෝටරයේ තදබදයක් හෝ ව්යවර්ථයක් නොමැති විට පතුවළ, බාහිර දෝෂ ඇඟවීම් සඳහා ප්රතිදානයන් යනාදිය. ඒවා සියල්ලම අවශ්ය නොවේ, නමුත් යන්ත්රයක් තැනීමේදී ජීවිතය වඩාත් පහසු කළ හැකිය.
නවවන සහ වඩාත්ම වැදගත් අංගයක් - රියදුරු ගුණාත්මකභාවය. ලක්ෂණ ආදිය සමඟ ප්රායෝගිකව කිසිදු සම්බන්ධයක් නැත. වෙළඳපොලේ බොහෝ දීමනා ඇති අතර, සමහර විට නිෂ්පාදකයින් දෙදෙනෙකුගේ රියදුරන්ගේ ලක්ෂණ බොහෝ දුරට සමපාත වන අතර, ඒවා එකින් එක යන්ත්රයේ ස්ථාපනය කිරීමෙන්, එක් නිෂ්පාදකයෙකු පැහැදිලිවම ඔහුගේ කාර්යය නොකරන බව පැහැදිලි වේ, සහ මිල අඩු යකඩ නිපදවීමට වඩා හොඳ වාසනාවක් ඇත. සමහර වක්ර දත්ත මත පදනම්ව රියදුරු මට්ටම කල්තියා තීරණය කිරීම ආරම්භකයකුට තරමක් අපහසුය. ඔබට “ස්ටල් ඩිටෙක්ට්” හෝ අනුනාද මර්දනය වැනි බුද්ධිමත් ක්රියාකාරකම් ගණන කෙරෙහි අවධානය යොමු කිරීමට උත්සාහ කළ හැකිය, එසේම ඔප්පු කළ ක්රමයක් භාවිතා කරන්න - වෙළඳ නාම කෙරෙහි අවධානය යොමු කරන්න.
ස්ටෙපර් මෝටර සිත්ගන්නා සුළු වන්නේ ඒවා ඔබට පතුවළ යම් කෝණයකට කරකැවීමට ඉඩ සලසන බැවිනි. ඒ අනුව, ඔවුන්ගේ උපකාරයෙන් ඔබට පතුවළ නිශ්චිත විප්ලව ගණනකින් භ්රමණය කළ හැකිය, මන්ද N විප්ලවය ද 360*N ට සමාන යම් කෝණයක් වන අතර, වෙනත් දේ අතර, නිඛිල නොවන විප්ලව සංඛ්යාවකින්, උදාහරණයක් ලෙස, 0.75 විප්ලව, 2.5 විප්ලව, 3.7 පිරිවැටුම, ආදිය. ස්ටෙපර් මෝටරවල මෙම හැකියාවන් ඔවුන්ගේ යෙදුමේ විෂය පථය තීරණය කරයි. ඒවා ප්රධාන වශයෙන් ස්ථානගත කිරීම සඳහා යොදා ගනී විවිධ උපාංග: ඩිස්ක් ඩ්රයිව් වල හිස් කියවන්න, මුද්රණ යන්ත්රවල සහ ප්ලොටර් වල මුද්රණ හිස් යනාදිය.
ස්වාභාවිකවම, ගුවන්විදුලි ආධුනිකයන්ට එවැනි අවස්ථාවන් නොසලකා හැරිය නොහැකි විය. ඔවුන් නිර්මාණවල ස්ටෙපර්ස් සාර්ථකව භාවිතා කරයි ගෙදර හැදූ රොබෝවරු, ගෙදර හැදූ CNC යන්ත්ර ආදිය. ස්ටෙපර් මෝටරයක් සමඟ මගේ අත්හදා බැලීම්වල ප්රති results ල පහත දැක්වේ, මෙය යමෙකුට ප්රයෝජනවත් වනු ඇතැයි මම බලාපොරොත්තු වෙමි.
ඉතින්, අත්හදා බැලීම් සඳහා අපට අවශ්ය කුමක්ද? පළමුව, ස්ටෙපර් මෝටරය. මම M20SP-GW15 හි ප්රතිසමයක් වන පැරණි 3.5" තැටි ධාවකයකින් ඉරා දැමූ අද්භූත නාමයක් සහිත වෝල්ට් 5ක චීන බයිපෝලර් ස්ටෙපර් එකක් ගත්තා. දෙවනුව, මෝටර් වංගු සැලකිය යුතු ධාරාවක් පරිභෝජනය කරන බැවින් (දී මේ අවස්ථාවේ දී 300 mA දක්වා), එවිට ස්ටෙපර් සෘජුවම පාලකයට සම්බන්ධ කිරීමට නොහැකි වනු ඇති බව පැහැදිලිය;
බයිපෝලර් ස්ටෙපර් මෝටර සඳහා ධාවකයක් ලෙස, ඊනියා H-පාලම පරිපථයක් හෝ විශේෂ ක්ෂුද්ර පරිපථයක් (තවමත් H-පාලමක් ඉදි කර ඇත) සාමාන්යයෙන් භාවිතා වේ. ඇත්ත වශයෙන්ම, ඔබට එය මූර්ති කළ හැකිය, නමුත් මම එම පැරණි තැටි ධාවකයෙන් සූදානම් කළ මයික්රු (LB1838) එකක් ගත්තා. ඇත්ත වශයෙන්ම, ඉහත විස්තර කර ඇති සියල්ලට අමතරව, අපගේ අත්හදා බැලීම් සඳහා අපට අවශ්ය වනු ඇත: PIC පාලකයක් (PIC12F629 ලාභම ලෙස ගන්නා ලදී) සහ බොත්තම් කිහිපයක්.
රූප සටහනට කෙලින්ම යාමට පෙර, අපි න්යාය ටිකක් තේරුම් ගනිමු.
බයිපෝලර් ස්ටෙපර් මෝටරයක දඟර දෙකක් ඇති අතර, ඒ අනුව, වයර් හතරක් හරහා සම්බන්ධ වේ. සරලව නාද කිරීමෙන් ඔබට වංගු වල කෙළවර සොයාගත හැකිය - එකම දඟරයට අයත් වයර්වල කෙළවර එකිනෙකා සමඟ නාද වනු ඇත, නමුත් විවිධ වංගු වලට අයත් කෙළවර එසේ නොවේ. අපි පළමු වංගුවේ කෙළවර “a”, “b” අක්ෂරවලින් සහ දෙවන වංගුවේ කෙළවර “c”, “d” අක්ෂරවලින් දක්වන්නෙමු.
අදාළ නිදර්ශකයේ මෝටරය අසල සම්බන්ධතා වල ඩිජිටල් සලකුණු ඇත වර්ණ කේතනයවයර් (දෙවියන් දන්නවා, සමහර විට මෙය ද යම් ආකාරයක සම්මතයක් විය හැකිය): 1 - රතු, 2 - නිල් - පළමු වංගු කිරීම; 3 - කහ, 4 - සුදු - දෙවන එතීෙම්.
බයිපෝලර් ස්ටෙපර් මෝටරයක් භ්රමණය වීමට නම්, වගුවේ දක්වා ඇති අනුපිළිවෙලෙහි වංගු සවි කිරීම අවශ්ය වේ. මේසය හරහා ගමන් කරන දිශාව රවුමක ඉහළ සිට පහළට තෝරාගෙන තිබේ නම්, එන්ජිම ඉදිරියට භ්රමණය වේ, පහළ සිට ඉහළට රවුමක නම්, එන්ජිම පසුපසට භ්රමණය වේ:
එක් සම්පූර්ණ චක්රයක් තුළ එන්ජිම පියවර හතරක් ගනී.
සදහා නිසි මෙහෙයුම, වගුවේ දක්වා ඇති මාරු කිරීමේ අනුපිළිවෙල දැඩි ලෙස නිරීක්ෂණය කළ යුතුය. එනම්, උදාහරණයක් ලෙස, දෙවන සංයෝජනයෙන් පසුව (අපි “c” පින් කිරීමට + යෙදූ විට සහ “d” පින් කිරීමට අඩු කළ විට), අපට තුන්වන සංයෝජනය යෙදිය හැකිය (දෙවන වංගු කිරීම ක්රියා විරහිත කරන්න, සහ පළමු එකට අදාළ වේ. “a” සහ + සිට “ b” දක්වා), එවිට එන්ජිම එක් පියවරක් ඉදිරියට හැරෙනු ඇත, නැතහොත් පළමු සංයෝජනය (එන්ජිම එක් පියවරක් පසුපසට හැරෙනු ඇත).
ඔබ භ්රමණය ආරම්භ කිරීමට අවශ්ය සංයෝජනය තීරණය වන්නේ එන්ජිම ක්රියා විරහිත කිරීමට පෙර (ඇත්ත වශයෙන්ම, ඔබ එය අතින් හැරුනේ නම් මිස) එන්ජිමට සපයන ලද අවසාන සංයෝජනය සහ භ්රමණයේ අපේක්ෂිත දිශාව මගිනි.
එනම්, අපි කියමු අපි එන්ජිම පියවර 5 ක් ඉදිරියට හරවා, එය 2-3-4-1-2 සංයෝජන ලබා දී, පසුව බලය අක්රිය කර, පසුව එය තවත් පියවරක් ඉදිරියට හැරවීමට අවශ්ය විය. මෙය සිදු කිරීම සඳහා, අපි සංයෝජන 3 දඟර සඳහා යෙදිය යුතු යැයි සිතමු, ඉන්පසු අපි එය නැවත ශක්තිජනක කළෙමු, සහ ටික වේලාවකට පසු අපට එය පියවර 2 ක් ආපසු ලබා දීමට අවශ්ය විය, එවිට අපි එන්ජිමට 2-1 සංයෝජන යෙදිය යුතුය. ඒ වගේම එකම ආත්මයෙන්.
මෙම වගුව, වෙනත් දේ අතර, අපි වංගු සම්බන්ධ කිරීමේ අනුපිළිවෙල ව්යාකූල කළහොත් ස්ටෙපර් මෝටරයට කුමක් සිදුවේද යන්න තක්සේරු කිරීමට අපට ඉඩ සලසයි.
මේ සමඟ අපි මෝටරය සමඟ අවසන් කර LB1838 ධාවකය වෙත යන්නෙමු.
මෙම කුඩා උපාංගයට පාලක කකුල් හතරක් (IN1, IN2, EN1, EN2) ඇත, ඒවාට අපි පාලකයෙන් සංඥා එවනු ඇත, සහ මෝටර් එතුම් සම්බන්ධ කර ඇති ප්රතිදාන කකුල් හතරක් (Out1, Out2, Out3, Out4). එතීෙම් පහත පරිදි සම්බන්ධ කර ඇත: වයර් "a" Out1 ට සම්බන්ධ කර ඇත, වයර් "b" Out2 ට සම්බන්ධ කර ඇත, වයර් "c" Out3 ට සම්බන්ධ කර ඇත, වයර් "d" Out4 වෙත සම්බන්ධ වේ.
පහත දැක්වෙන්නේ ධාවක චිපය සඳහා වන සත්ය වගුවයි (ආදානවල තත්වය අනුව ප්රතිදානයේ තත්වය):
| IN1 | EN1 | අවුට්1 (අ) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| අඩු | අධි | + | — | අඩු | අධි | + | — |
| අධි | අධි | — | + | අධි | අධි | — | + |
| x | අඩු | අක්රිය | අක්රිය | x | අඩු | අක්රිය | අක්රිය |
දැන් අපි රූප සටහන මත IN1, EN1, IN2, EN2 සංඥා වලින් එකක් සඳහා තිබිය යුත්තේ කුමන ආකාරයෙන්ද යන්න බලමු. සම්පූර්ණ චක්රයභ්රමණය (පියවර 4), i.e. එතීෙම් සම්බන්ධතා වල සංයෝජන 4ම ප්රතිදානයන්හි අනුපිළිවෙලින් දිස්වන පරිදි:

ඔබ මෙම රූප සටහන (වමේ) හොඳින් බැලුවහොත්, IN1 සහ IN2 සංඥා හරියටම සමාන කළ හැකි බව, එනම්, මෙම පාද දෙකටම එකම සංඥාව යෙදිය හැකි බව පැහැදිලි වේ. මෙම අවස්ථාවේදී, අපගේ රූප සටහන මේ ආකාරයෙන් පෙනෙනු ඇත:

එබැවින්, මෝටර් එතුම් සම්බන්ධ කිරීම සඳහා සුදුසු සංයෝජන ලබා ගැනීම සඳහා ධාවක පාලන ආදානවල (EN1, EN2, IN1, IN2) කුමන සංඥා මට්ටම් සංයෝජන තිබිය යුතුද යන්න අවසාන රූප සටහනෙන් පෙන්වන අතර ඊතල මඟින් මේවා වෙනස් කිරීමේ අනුපිළිවෙල ද දක්වයි. අපේක්ෂිත පැත්තට භ්රමණය සහතික කිරීම සඳහා සංයෝජන.
මූලික වශයෙන් සමස්ත න්යාය එයයි. පාලන ආදානවල අවශ්ය මට්ටම් සංයෝජන පාලකය මගින් ජනනය කරනු ලැබේ (අපි PIC12F629 භාවිතා කරමු).
යෝජනා ක්රමය:
සූදානම් උපාංගය:


පාලන වැඩසටහන පහත ඇල්ගොරිතම ක්රියාත්මක කරයි: ඔබ KH1 බොත්තම එබූ විට, එන්ජිම එක් දිශාවකට එක් පියවරක් හැරෙන අතර, ඔබ KH2 බොත්තම එබූ විට, එය අනෙක් දිශාවට එක් පියවරක් හැරේ.
ඇත්ත වශයෙන්ම, ඔබට එය මෙහි ඉස්කුරුප්පු කර පරිගණකයකින් පාලනය ක්රියාත්මක කළ හැකිය (සම්ප්රේෂණ වේගය, පියවර ගණන සහ පරිගණකයෙන් භ්රමණය වන දිශාව).



