Πρόγραμμα οδήγησης βηματικού κινητήρα τρανζίστορ
Παρουσιάζω στην προσοχή σας ένα πρόγραμμα οδήγησης διπολικού βηματικού κινητήρα που βασίζεται σε διπολικά τρανζίστορ της σειράς "KT".
Ο οδηγός λειτουργεί με βάση την αρχή του ακολούθου εκπομπού. Το σήμα ελέγχου παρέχεται στο στάδιο ενίσχυσης που είναι συναρμολογημένο στο τρανζίστορ KT315. Στη συνέχεια θα χτυπήσει τη γέφυρα N από το συμπληρωματικό ζεύγος KT815 και KT 814.
Ένα στάδιο ενίσχυσης είναι απαραίτητο επειδή η έξοδος ρεύματος από τον μικροελεγκτή δεν επαρκεί  τρανζίστορ ισχύος ανοίγματος. Μετά τα τρανζίστορ ισχύος, εγκαθίστανται δίοδοι για την απόσβεση της αυτοεπαγωγής του κινητήρα.
τρανζίστορ ισχύος ανοίγματος. Μετά τα τρανζίστορ ισχύος, εγκαθίστανται δίοδοι για την απόσβεση της αυτοεπαγωγής του κινητήρα.
Το κύκλωμα προβλέπει επίσης καταστολή θορύβου με τη μορφή πυκνωτών 3 επί 0,1 μF και 1 επί 100 μF. Δεδομένου ότι το πρόγραμμα οδήγησης έχει σχεδιαστεί για να λειτουργεί με κινητήρα μονάδας δίσκου CD 150 watt, η ψύξη τρανζίστορ δεν είναι

Βηματικός κινητήρας από μονάδα CD συνδεδεμένη σε πρόγραμμα οδήγησης τρανζίστορ
εγκατασταθεί, αλλά μέγιστο ρεύμαΗ τάση εκπομπού των τρανζίστορ KT814 και KT815 είναι 1,5 A, χάρη στην οποία αυτός ο οδηγός μπορεί να γυρίσει ακόμη πιο ισχυρούς κινητήρες. Για να γίνει αυτό, πρέπει να εγκαταστήσετε πλάκες ψύξης στα τρανζίστορ ισχύος.
Το άρθρο προβλέπει διαγράμματα κυκλώματοςεπιλογές για έναν απλό, φθηνό ελεγκτή βηματικού κινητήρα και κάτοικο λογισμικό(υλικολογισμικό) για αυτό.
Γενική περιγραφή.
Ο ελεγκτής βηματικού κινητήρα έχει αναπτυχθεί στον ελεγκτή PIC PIC12F629. Αυτός είναι ένας μικροελεγκτής 8 ακίδων που κοστίζει μόνο 0,5 $. Παρά τον απλό σχεδιασμό και χαμηλό κόστοςεξαρτήματα, ο ελεγκτής παρέχει αρκετά υψηλή απόδοσηκαι ευρεία λειτουργικότητα.
- Ο ελεγκτής διαθέτει επιλογές κυκλώματος για τον έλεγχο τόσο μονοπολικών όσο και διπολικών βηματικών κινητήρων.
- Παρέχει ρύθμιση της ταχύτητας περιστροφής του κινητήρα σε ένα ευρύ φάσμα.
- Διαθέτει δύο λειτουργίες ελέγχου βηματικού κινητήρα:
- πλήρες βήμα?
- μισό βήμα.
- Παρέχει περιστροφή προς τα εμπρός και προς τα πίσω.
- Η ρύθμιση των λειτουργιών, των παραμέτρων και ο έλεγχος του ελεγκτή πραγματοποιείται χρησιμοποιώντας δύο κουμπιά και ένα σήμα ON (ενεργοποίηση).
- Όταν η τροφοδοσία είναι απενεργοποιημένη, όλες οι λειτουργίες και οι παράμετροι αποθηκεύονται στη μη πτητική μνήμη του ελεγκτή και δεν απαιτείται επαναφορά όταν είναι ενεργοποιημένος.
Ο ελεγκτής δεν διαθέτει προστασία έναντι βραχυκυκλωμάτων των περιελίξεων του κινητήρα. Αλλά η εφαρμογή αυτής της λειτουργίας περιπλέκει σημαντικά το κύκλωμα και το βραχυκύκλωμα των περιελίξεων είναι μια εξαιρετικά σπάνια περίπτωση. Δεν έχω συναντήσει κάτι τέτοιο. Επιπλέον, η μηχανική διακοπή του άξονα του βηματικού κινητήρα κατά την περιστροφή δεν προκαλεί επικίνδυνα ρεύματα και δεν απαιτεί προστασία του οδηγού.
Μπορείτε να διαβάσετε για τους τρόπους και τις μεθόδους ελέγχου ενός βηματικού κινητήρα, για τους δύτες.
Κύκλωμα ελεγκτή για μονοπολικό βηματικό κινητήρα με οδηγό διπολικού τρανζίστορ.

Δεν υπάρχει τίποτα ιδιαίτερο να εξηγηθεί στο διάγραμμα. ΠΡΟΣ ΤΗΝ Ελεγκτής PICσυνδεδεμένος:
- κουμπιά "+" και "–" (μέσω της αναλογικής εισόδου του συγκριτή).
- Σήμα ON (ενεργοποίηση κινητήρα).
- πρόγραμμα οδήγησης (τρανζίστορ VT1-Vt4, προστατευτικές δίοδοι VD2-VD9).
Το PIC χρησιμοποιεί μια εσωτερική γεννήτρια ρολογιού. Οι λειτουργίες και οι παράμετροι αποθηκεύονται στο εσωτερικό EEPROM.
Το κύκλωμα οδήγησης που βασίζεται σε διπολικά τρανζίστορ KT972 παρέχει ρεύμα μεταγωγής έως 2 A, τάση περιέλιξης έως 24 V.
Κόλλησα το χειριστήριο σε μια πλάκα ψωμιού 45 x 20 mm.

Εάν το ρεύμα μεταγωγής δεν υπερβαίνει τα 0,5 A, μπορείτε να χρησιμοποιήσετε τρανζίστορ της σειράς BC817 σε πακέτα SOT-23. Η συσκευή θα είναι αρκετά μινιατούρα.
Διαχείριση λογισμικού και ελεγκτή.
Το μόνιμο λογισμικό είναι γραμμένο σε γλώσσα assembly με κυκλική επαναφορά όλων των καταχωρητών. Κατ 'αρχήν, το πρόγραμμα δεν μπορεί να παγώσει. Μπορείτε να κάνετε λήψη λογισμικού (υλικολογισμικού) για το PIC12F629.
Ο έλεγχος του ελεγκτή είναι αρκετά απλός.
- Όταν το σήμα "ON" είναι ενεργό (κλειστό στη γείωση), ο κινητήρας περιστρέφεται, όταν είναι ανενεργός (απομακρυνθεί από το έδαφος), σταματά.
- Όταν ο κινητήρας λειτουργεί (το σήμα ON είναι ενεργό), τα κουμπιά «+» και «–» αλλάζουν την ταχύτητα περιστροφής.
- Κάθε πάτημα του κουμπιού "+" αυξάνει την ταχύτητα κατά μια ελάχιστη αύξηση.
- Πατώντας το κουμπί «–» μειώνεται η ταχύτητα.
- Όταν κρατάτε πατημένα τα κουμπιά «+» ή «–», η ταχύτητα περιστροφής αυξάνεται ή μειώνεται ομαλά κατά 15 βήματα ανά δευτερόλεπτο.
- Όταν ο κινητήρας είναι σταματημένος (το σήμα ON δεν είναι ενεργό).
- Πατώντας το κουμπί "+" ρυθμίζεται η λειτουργία περιστροφής προς την κατεύθυνση προς τα εμπρός.
- Πατώντας το κουμπί «–» τίθεται το χειριστήριο σε λειτουργία αντίστροφης περιστροφής.
- Για να επιλέξετε μια λειτουργία – πλήρες βήμα ή μισό βήμα, πρέπει να κρατήσετε πατημένο το κουμπί «–» ενώ τροφοδοτείτε το χειριστήριο. Η λειτουργία ελέγχου κινητήρα θα αλλάξει σε άλλη (ανεστραμμένη). Αρκεί να κρατήσετε πατημένο το κουμπί για 0,5 δευτερόλεπτα.
Κύκλωμα ελεγκτή για μονοπολικό βηματικό κινητήρα με οδηγό βασισμένο σε τρανζίστορ MOSFET.

Τα τρανζίστορ MOSFET χαμηλού ορίου σάς επιτρέπουν να δημιουργήσετε ένα πρόγραμμα οδήγησης με υψηλότερες παραμέτρους. Η χρήση τρανζίστορ MOSFET, για παράδειγμα, IRF7341, στο πρόγραμμα οδήγησης παρέχει τα ακόλουθα πλεονεκτήματα.
- Αντίσταση τρανζίστορ μέσα ανοιχτή κατάστασηόχι περισσότερο από 0,05 Ohm. Αυτό σημαίνει χαμηλή πτώση τάσης (0,1 V σε ρεύμα 2 Α), τα τρανζίστορ δεν θερμαίνονται και δεν χρειάζονται θερμαντικά σώματα ψύξης.
- Ρεύμα τρανζίστορ έως 4 A.
- Τάση έως 55 V.
- Ένα πακέτο SOIC-8 8 ακίδων περιέχει 2 τρανζίστορ. Εκείνοι. Για την υλοποίηση του προγράμματος οδήγησης, θα απαιτηθούν 2 μικροσκοπικές θήκες.
Τέτοιες παράμετροι δεν μπορούν να επιτευχθούν με διπολικά τρανζίστορ. Για ρεύματα μεταγωγής πάνω από 1 A, συνιστώ ανεπιφύλακτα την επιλογή συσκευής χρησιμοποιώντας τρανζίστορ MOSFET.
Σύνδεση με τον ελεγκτή μονοπολικών βηματικών κινητήρων.
Οι κινητήρες με διαμορφώσεις περιέλιξης συρμάτων 5, 6 και 8 μπορούν να λειτουργήσουν σε μονοπολική λειτουργία.
Διάγραμμα καλωδίωσης μονοπολικού βηματικού κινητήρα με 5 και 6 καλώδια (απαγωγοί).

Για κινητήρες FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH με διαμόρφωση περιέλιξης 6 συρμάτων, οι ακροδέκτες επισημαίνονται με τα ακόλουθα χρώματα.

Η διαμόρφωση 5 συρμάτων είναι μια επιλογή στην οποία τα κοινά καλώδια περιέλιξης συνδέονται μέσα στον κινητήρα. Υπάρχουν τέτοιοι κινητήρες. Για παράδειγμα, PM35S-048.

Τεκμηρίωση βηματικού κινητήρα PM35S-048 σε Μορφή PDFμπορεί να γίνει λήψη.
Διάγραμμα καλωδίωσης μονοπολικού βηματικού κινητήρα με 8 καλώδια (καλώδια).
Όπως και στην προηγούμενη επιλογή, μόνο όλες οι συνδέσεις περιελίξεων πραγματοποιούνται εκτός του κινητήρα.
Πώς να επιλέξετε τάση για βηματικό κινητήρα.
Σύμφωνα με το νόμο του Ohm, μέσω της αντίστασης περιέλιξης και επιτρεπόμενο ρεύμαφάσεις.
U = Iphase * Περιέλιξη
Η αντίσταση περιέλιξης DC μπορεί να μετρηθεί, αλλά το ρεύμα πρέπει να αναζητηθεί στα δεδομένα αναφοράς.
Θα ήθελα να το τονίσω αυτό μιλάμε γιασχετικά με απλούς οδηγούς που δεν παρέχουν σύνθετες κυματομορφές ρεύματος και τάσης. Αυτές οι λειτουργίες χρησιμοποιούνται σε υψηλές ταχύτητεςπεριστροφή.
Πώς να προσδιορίσετε τις περιελίξεις των βηματικών κινητήρων εάν δεν υπάρχουν δεδομένα αναφοράς.
Σε μονοπολικούς κινητήρες με 5 και 6 ακροδέκτες, ο μεσαίος ακροδέκτης μπορεί να προσδιοριστεί μετρώντας την αντίσταση των περιελίξεων. Μεταξύ των φάσεων η αντίσταση θα είναι διπλάσια από αυτή μεταξύ του μεσαίου ακροδέκτη και της φάσης. Οι μεσαίοι ακροδέκτες συνδέονται στο θετικό του τροφοδοτικού.
Στη συνέχεια, οποιοσδήποτε από τους ακροδέκτες φάσης μπορεί να αντιστοιχιστεί ως φάση Α. Θα υπάρχουν 8 επιλογές για τους ακροδέκτες εναλλαγής. Μπορείτε να τα ξεχωρίσετε. Αν σκεφτείτε ότι η περιέλιξη της φάσης Β έχει διαφορετικό μεσαίο καλώδιο, τότε οι επιλογές γίνονται ακόμη λιγότερες. Τα ταιριαστά τυλίγματα φάσης δεν οδηγούν σε αστοχία του οδηγού ή του κινητήρα. Ο κινητήρας κροταλίζει και δεν αναποδογυρίζει.
Απλώς θυμηθείτε ότι η πολύ υψηλή ταχύτητα περιστροφής (εκτός συγχρονισμού) οδηγεί στο ίδιο αποτέλεσμα. Εκείνοι. Είναι απαραίτητο να ρυθμίσετε την ταχύτητα περιστροφής σκόπιμα χαμηλή.
Διάγραμμα κυκλώματος ενός ελεγκτή διπολικού βηματικού κινητήρα με ενσωματωμένο πρόγραμμα οδήγησης L298N.
Η διπολική λειτουργία παρέχει δύο πλεονεκτήματα:
- μπορεί να χρησιμοποιηθεί ένας κινητήρας με σχεδόν οποιαδήποτε διαμόρφωση περιέλιξης.
- Η ροπή αυξάνεται κατά περίπου 40%.
Η δημιουργία ενός διπολικού κυκλώματος οδηγού χρησιμοποιώντας διακριτά στοιχεία είναι μια άχαρη εργασία. Είναι πιο εύκολο να χρησιμοποιήσετε το ενσωματωμένο πρόγραμμα οδήγησης L298N. Υπάρχει μια περιγραφή στα ρωσικά.
Το κύκλωμα ελεγκτή με το διπολικό πρόγραμμα οδήγησης L298N μοιάζει με αυτό.
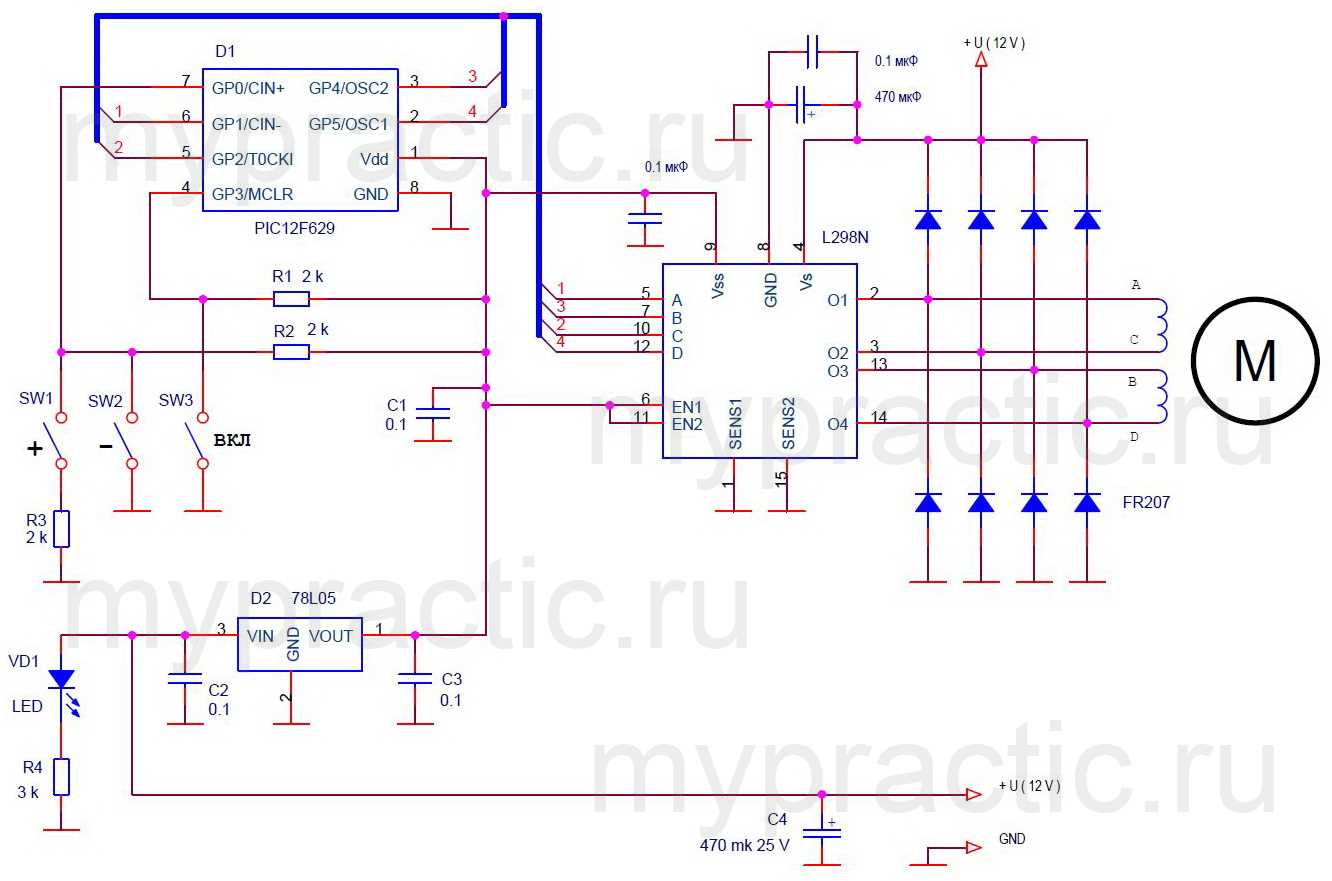
Περιλαμβάνεται πρόγραμμα οδήγησης L298N πρότυπο σχήμα. Αυτή η επιλογή ελεγκτή παρέχει ρεύματα φάσης έως 2 A, τάση έως 30 V.
Σύνδεση σε ελεγκτή διπολικού βηματικού κινητήρα.
Σε αυτή τη λειτουργία, μπορεί να συνδεθεί ένας κινητήρας με οποιαδήποτε διαμόρφωση περιέλιξης 4, 6, 8 καλωδίων.
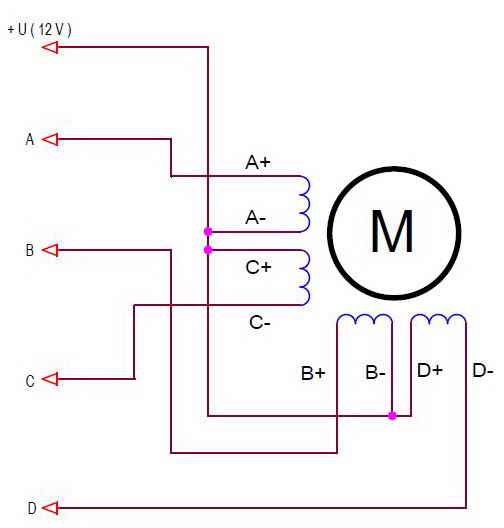
Διάγραμμα καλωδίωσης διπολικού βηματικού κινητήρα με 4 καλώδια (απαγωγές).

Για κινητήρες FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH με διαμόρφωση περιέλιξης 4 καλωδίων, οι ακροδέκτες επισημαίνονται με τα ακόλουθα χρώματα.
Διάγραμμα καλωδίωσης διπολικού βηματικού κινητήρα με 6 καλώδια (απαγωγοί).

Για κινητήρες FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH με αυτή τη διαμόρφωση περιέλιξης, οι ακροδέκτες επισημαίνονται με τα ακόλουθα χρώματα.
Ένα τέτοιο κύκλωμα απαιτεί μια τάση τροφοδοσίας δύο φορές υψηλότερη σε σύγκριση με μια μονοπολική σύνδεση, επειδή Η αντίσταση περιέλιξης είναι διπλάσια. Πιθανότατα, ο ελεγκτής πρέπει να συνδεθεί σε τροφοδοτικό 24 V.
Διάγραμμα καλωδίωσης διπολικού βηματικού κινητήρα με 8 καλώδια (καλώδια).
Μπορεί να υπάρχουν δύο επιλογές:
- με διαδοχική σύνδεση
- με παράλληλη σύνδεση.
Σχέδιο διαδοχικής σύνδεσης περιελίξεων.

Ένα κύκλωμα με περιελίξεις συνδεδεμένες σε σειρά απαιτεί διπλάσια τάση περιέλιξης. Αλλά το ρεύμα φάσης δεν αυξάνεται.
Διάγραμμα παράλληλης σύνδεσης περιελίξεων.

Ένα κύκλωμα με παράλληλη σύνδεση περιελίξεων διπλασιάζει τα ρεύματα φάσης. Τα πλεονεκτήματα αυτού του κυκλώματος περιλαμβάνουν τη χαμηλή επαγωγή των περιελίξεων φάσης. Αυτό είναι σημαντικό σε υψηλές ταχύτητες περιστροφής.
Εκείνοι. Η επιλογή μεταξύ σειριακής και παράλληλης σύνδεσης ενός διπολικού βηματικού κινητήρα 8 ακίδων καθορίζεται από τα ακόλουθα κριτήρια:
- μέγιστο ρεύμα προγράμματος οδήγησης.
- μέγιστη τάσηοδηγοί?
- ταχύτητα περιστροφής κινητήρα.
Μπορείτε να κάνετε λήψη του λογισμικού (υλικολογισμικού) για το PIC12F629.
- Αν και οι διπολικοί βηματικοί κινητήρες είναι σχετικά ακριβοί, παρέχουν υψηλή ροπή για το φυσικό τους μέγεθος. Ωστόσο, οι δύο περιελίξεις κινητήρα απαιτούν οκτώ τρανζίστορ ελέγχου συνδεδεμένα σε τέσσερις γέφυρες H. Κάθε τρανζίστορ πρέπει να αντέχει υπερφορτώσεις και βραχυκυκλώματα και να αποκαθιστά γρήγορα τη λειτουργικότητα. Και ο οδηγός, κατά συνέπεια, απαιτεί σύνθετα κυκλώματαπροστασία με πολλά παθητικά στοιχεία.

Εικόνα 1
Εικόνα 1. Ένα μόνο IC σε μια συσκευασία επιφανειακής τοποθέτησης και πολλά παθητικά εξαρτήματα μπορούν να οδηγήσουν έναν διπολικό βηματικό κινητήρα.
Έλεγχος διπολικού βηματικού κινητήρα
Πρόγραμμα οδήγησης βηματικού κινητήρα DIY- Το σχήμα 1 δείχνει ένα εναλλακτικό κύκλωμα οδήγησης κινητήρα που βασίζεται στον ενισχυτή ήχου κατηγορίας D της Maxim. Το τσιπ MAX9715 σε ένα μικροσκοπικό πακέτο επιφανειακής στήριξης μπορεί να παρέχει έως και 2,8 W ισχύος σε ένα τυπικό φορτίο 4 ή 8 Ω. Κάθε μία από τις δύο εξόδους του μικροκυκλώματος σχηματίζεται από γέφυρες H από ισχυρά MOSFET, που ελέγχουν ζεύγη γραμμών OUTR+, OUTR- και OUTL+, OUTL-, οι οποίες συνδέονται με τις περιελίξεις Α και Β του βηματικού κινητήρα, αντίστοιχα. Κάθε ζεύγος παράγει ένα διαφορικό πλάτος διαμορφωμένο σήμα παλμού με ονομαστική συχνότητα μεταγωγής 1,22 MHz. Το χαμηλό επίπεδο θορύβου που δημιουργείται από το κύκλωμα εξαλείφει την ανάγκη για φίλτρα εξόδου.
Πυκνωτές αποσύνδεσης
Οι πυκνωτές C1, C3, C4 και C6 χρησιμεύουν ως αποζεύκτες για τις εισόδους ισχύος και πόλωσης, ενώ οι C5 και C7 παρέχουν λειτουργίες αποθήκευσης για ενισχυτές εξόδου υψηλής ισχύος κατηγορίας D. Οι πυκνωτές C8 και C9 περιορίζουν το εύρος ζώνης του ενισχυτή στα 16 Hz και τα σφαιρίδια φερρίτη L2 και L3 μειώνουν τις ηλεκτρικές παρεμβολές από μακριά καλώδια. Το φίλτρο σχήματος U C1, C2, L1 καταστέλλει τον θόρυβο στην είσοδο ισχύος του τσιπ IC1. Τα σήματα εισόδου των μικροκυκλωμάτων Step_A και Step_B, τα οποία ελέγχουν το δεξί και το αριστερό κανάλι του κινητήρα, αντίστοιχα, μπορούν να παραχθούν από οποιοδήποτε κατάλληλο ελεγκτή. Τα εσωτερικά κυκλώματα προστατεύουν τον ενισχυτή από βραχυκυκλώματα και υπερθέρμανση σε περίπτωση βλάβης βηματικού κινητήρα ή λανθασμένη σύνδεσητα συμπεράσματά του.

Τραπέζι 1
Εικονογράφηση ακολουθίας παλμών
Ο Πίνακας 1 απεικονίζει την ακολουθία των παλμών Step_A και Step_B που ελέγχουν την περιστροφή ενός τυπικού βηματικού κινητήρα προς μία κατεύθυνση εφαρμόζοντας συνεχώς συνδυασμούς σημάτων από το 0 έως το 4. Το βήμα 4 επαναφέρει τον άξονα του κινητήρα στο Αρχική θέση, ολοκληρώνοντας μια περιστροφή 360°. Για να αλλάξετε την κατεύθυνση περιστροφής του κινητήρα, ξεκινήστε να σχηματίζετε ένα διάγραμμα χρονισμού των παλμών από το κάτω μέρος του πίνακα και διαδοχικά μετακινηθείτε προς τα πάνω κατά μήκος του. Εφαρμόζοντας χαμηλή τάση λογικής στάθμης στην είσοδο SHDN του μικροκυκλώματος (ακίδα 8), μπορείτε να απενεργοποιήσετε και τα δύο κανάλια του ενισχυτή. Οι κυματομορφές στις εισόδους και εξόδους του κυκλώματος φαίνονται στο σχήμα 2.
Οι βηματικοί κινητήρες χρησιμοποιούνται σήμερα σε πολλούς βιομηχανικούς τομείς. Κινητήρες αυτού του τύπουδιαφέρουν στο ότι επιτρέπουν την επίτευξη υψηλής ακρίβειας τοποθέτησης του σώματος εργασίας, σε σύγκριση με άλλους τύπους κινητήρων. Προφανώς, απαιτείται ακριβής αυτόματος έλεγχος για τη λειτουργία ενός βηματικού κινητήρα. Αυτό ακριβώς εξυπηρετούν για αυτόν τον σκοπό. ελεγκτές βηματικού κινητήρα, διασφαλίζοντας την αδιάλειπτη και ακριβή λειτουργία των ηλεκτροκινητήρων για διάφορους σκοπούς.
Χονδρικά, η αρχή λειτουργίας ενός βηματικού κινητήρα μπορεί να περιγραφεί ως εξής. Κάθε πλήρης περιστροφή του ρότορα βηματικού κινητήρα αποτελείται από πολλά βήματα. Η συντριπτική πλειονότητα των βηματικών κινητήρων βαθμολογείται σε βήματα 1,8 μοιρών, κάνοντας 200 βήματα ανά πλήρη περιστροφή. Ο ηλεκτροκινητήρας αλλάζει θέση προς βήμα όταν εφαρμόζεται τάση τροφοδοσίας σε ένα συγκεκριμένο τύλιγμα στάτη. Η φορά περιστροφής εξαρτάται από την κατεύθυνση του ρεύματος στην περιέλιξη.
Το επόμενο βήμα είναι η απενεργοποίηση της πρώτης περιέλιξης, η τροφοδοσία παρέχεται στο δεύτερο και ούτω καθεξής, ως αποτέλεσμα, μετά την επεξεργασία κάθε περιέλιξης, ο ρότορας θα κάνει μια πλήρη περιστροφή. Αλλά αυτή είναι μια πρόχειρη περιγραφή· στην πραγματικότητα, οι αλγόριθμοι είναι κάπως πιο περίπλοκοι, και αυτό θα συζητηθεί περαιτέρω.

Αλγόριθμοι ελέγχου βηματικού κινητήρα
Ο έλεγχος βηματικού κινητήρα μπορεί να υλοποιηθεί χρησιμοποιώντας έναν από τους τέσσερις κύριους αλγόριθμους: εναλλαγή φάσης, έλεγχος επικάλυψης φάσης, έλεγχος μισού βήματος ή έλεγχος μικροβημάτων.
Στην πρώτη περίπτωση, σε κάθε χρονική στιγμή, μόνο μία από τις φάσεις λαμβάνει ισχύ και τα σημεία ισορροπίας του ρότορα κινητήρα σε κάθε βήμα συμπίπτουν με τα βασικά σημεία ισορροπίας - οι πόλοι εκφράζονται σαφώς.
Ο έλεγχος επικάλυψης φάσης επιτρέπει στον ρότορα να φτάσει τα βήματα σε θέσεις μεταξύ των πόλων του στάτη, γεγονός που αυξάνει τη ροπή κατά 40% σε σύγκριση με τον έλεγχο χωρίς επικάλυψη φάσης. Η γωνία κλίσης διατηρείται, αλλά η θέση στερέωσης μετατοπίζεται - βρίσκεται μεταξύ των προεξοχών του πόλου του στάτορα. Αυτοί οι δύο πρώτοι αλγόριθμοι χρησιμοποιούνται σε ηλεκτρικό εξοπλισμό όπου δεν απαιτείται πολύ υψηλή ακρίβεια.
Ο έλεγχος μισού βήματος είναι ένας συνδυασμός των δύο πρώτων αλγορίθμων: μετά από ένα βήμα, είτε μία φάση (περιέλιξη) είτε δύο λαμβάνουν ισχύ. Το μέγεθος του βήματος μειώνεται στο μισό, η ακρίβεια τοποθέτησης είναι μεγαλύτερη και η πιθανότητα μηχανικού συντονισμού στον κινητήρα μειώνεται.
Τέλος, λειτουργία microstepping. Εδώ, το ρεύμα στις φάσεις αλλάζει σε μέγεθος έτσι ώστε η θέση της στερέωσης του ρότορα ανά βήμα θα είναι στο σημείο μεταξύ των πόλων και, ανάλογα με την αναλογία των μεγεθών των ρευμάτων σε φάσεις ταυτόχρονα ενεργοποιημένες, πολλά τέτοια βήματα μπορεί να αποκτηθεί. Ρυθμίζοντας την αναλογία ρεύματος και ρυθμίζοντας τον αριθμό των αναλογιών εργασίας, επιτυγχάνονται μικροβήματα - η πιο ακριβής τοποθέτηση του ρότορα.
Δείτε περισσότερες λεπτομέρειες με διαγράμματα εδώ:
Για να εφαρμόσετε πρακτικά τον επιλεγμένο αλγόριθμο, χρησιμοποιήστε Πρόγραμμα οδήγησης βηματικού κινητήρα. Το πρόγραμμα οδήγησης περιέχει ένα εξάρτημα ισχύος και έναν ελεγκτή.
Το τμήμα ισχύος του οδηγού είναι αυτό του οποίου η αποστολή είναι να μετατρέπει τους παλμούς ρεύματος που παρέχονται στις φάσεις σε κινήσεις του ρότορα: ένας παλμός - ένα ακριβές βήμα ή μικροβήμα.
Διεύθυνση και μέγεθος ρεύματος - κατεύθυνση και μέγεθος βήματος. Δηλαδή, το καθήκον του τμήματος ισχύος είναι να παρέχει ένα ρεύμα συγκεκριμένου μεγέθους και κατεύθυνσης στην αντίστοιχη περιέλιξη του στάτορα, να κρατά αυτό το ρεύμα για κάποιο χρονικό διάστημα και επίσης να ενεργοποιεί και να απενεργοποιεί γρήγορα τα ρεύματα έτσι ώστε τα χαρακτηριστικά ταχύτητας και ισχύος του ο δίσκος αντιστοιχεί στην εργασία.

Όσο πιο προηγμένο είναι το τμήμα ισχύος του οδηγού, τόσο μεγαλύτερη είναι η ροπή που μπορεί να αποκτηθεί στον άξονα. Γενικά, η τάση της προόδου στη βελτίωση των βηματικών κινητήρων και των οδηγών τους είναι η απόκτηση σημαντικής ροπής λειτουργίας και υψηλής ακρίβειας από κινητήρες μικρού μεγέθους, διατηρώντας παράλληλα υψηλή απόδοση.
Βηματικός ελεγκτής κινητήρα
Ο ελεγκτής βηματικού κινητήρα είναι ένα έξυπνο μέρος του συστήματος, το οποίο συνήθως βασίζεται σε έναν μικροελεγκτή με δυνατότητα επαναπρογραμματισμού. Είναι ο ελεγκτής που είναι υπεύθυνος για ποια στιγμή, σε ποια περιέλιξη, για πόσο καιρό και σε ποιο μέγεθος θα τροφοδοτηθεί το ρεύμα. Ο ελεγκτής ελέγχει τη λειτουργία του τμήματος ισχύος του προγράμματος οδήγησης.
Οι προηγμένοι ελεγκτές συνδέονται με έναν υπολογιστή και μπορούν να ρυθμιστούν σε πραγματικό χρόνο χρησιμοποιώντας έναν υπολογιστή. Η δυνατότητα πολλαπλού επαναπρογραμματισμού του μικροελεγκτή εξαλείφει την ανάγκη για τον χρήστη να αγοράζει έναν νέο ελεγκτή κάθε φορά που προσαρμόζεται η εργασία - αρκεί να ρυθμίσετε εκ νέου τον υπάρχοντα, αυτό είναι ευελιξία, ο ελεγκτής μπορεί εύκολα να αναπροσανατολιστεί προγραμματικά για να εκτελέσει νέες λειτουργίες .
Υπάρχει μια μεγάλη γκάμα προϊόντων που διατίθενται στην αγορά σήμερα σειρά μοντέλωνελεγκτές βηματικού κινητήρα από διάφορους κατασκευαστές, που χαρακτηρίζεται από τη δυνατότητα επέκτασης λειτουργιών. Οι προγραμματιζόμενοι ελεγκτές απαιτούν την εγγραφή ενός προγράμματος και ορισμένοι περιλαμβάνουν προγραμματιζόμενα λογικά μπλοκ, με τη βοήθεια των οποίων είναι δυνατή η ευέλικτη διαμόρφωση του αλγόριθμου ελέγχου βηματικού κινητήρα για μια συγκεκριμένη τεχνολογική διαδικασία.
Δυνατότητες ελεγκτή
Ο έλεγχος του βηματικού κινητήρα χρησιμοποιώντας έναν ελεγκτή σάς επιτρέπει να επιτύχετε υψηλή ακρίβεια έως και 20.000 μικροβήματα ανά περιστροφή. Επιπλέον, ο έλεγχος μπορεί να πραγματοποιηθεί είτε απευθείας από τον υπολογιστή, είτε μέσω προγράμματος συρραφής στη συσκευή ή με χρήση προγράμματος από κάρτα μνήμης. Εάν οι παράμετροι αλλάξουν κατά την εκτέλεση μιας εργασίας, ο υπολογιστής μπορεί να μετρήσει τους αισθητήρες, να παρακολουθήσει τις μεταβαλλόμενες παραμέτρους και να αλλάξει γρήγορα τον τρόπο λειτουργίας του βηματικού κινητήρα.
Υπάρχουν στο εμπόριο μονάδες ελέγχου βηματικού κινητήρα στις οποίες συνδέετε: μια πηγή ρεύματος, κουμπιά ελέγχου, μια πηγή σήματος ρολογιού, ένα ποτενσιόμετρο για τη ρύθμιση του βήματος κ.λπ. Τέτοιες μονάδες σάς επιτρέπουν να ενσωματώνετε γρήγορα βηματικός κινητήραςσε εξοπλισμό για την εκτέλεση επαναλαμβανόμενων, κυκλικών εργασιών χρησιμοποιώντας χειροκίνητα ή αυτόματο έλεγχο. Δυνατότητα συγχρονισμού με εξωτερικές συσκευέςκαι υποστήριξη αυτόματη ενεργοποίηση, η απενεργοποίηση και ο έλεγχος είναι ένα αναμφισβήτητο πλεονέκτημα της μονάδας ελέγχου βηματικού κινητήρα.
Η μονάδα μπορεί να ελεγχθεί απευθείας από έναν υπολογιστή, εάν, για παράδειγμα, πρέπει να παίξετε ένα πρόγραμμα ή μέσα χειροκίνητη λειτουργίαχωρίς πρόσθετο εξωτερικό έλεγχο, δηλαδή αυτόνομα, όταν η φορά περιστροφής του άξονα βηματικού κινητήρα ρυθμίζεται από έναν αισθητήρα όπισθεν και η ταχύτητα ρυθμίζεται από ένα ποτενσιόμετρο. Η μονάδα ελέγχου επιλέγεται σύμφωνα με τις παραμέτρους του βηματικού κινητήρα που υποτίθεται ότι θα χρησιμοποιηθεί.
Ανάλογα με τη φύση του στόχου, επιλέγεται η μέθοδος ελέγχου του βηματικού κινητήρα. Εάν χρειάζεται να ρυθμίσετε έναν απλό έλεγχο μιας ηλεκτρικής μονάδας χαμηλής ισχύος, όταν σε κάθε στιγμή εφαρμόζεται ένας παλμός σε ένα πηνίο στάτορα: μια πλήρης περιστροφή απαιτεί, ας πούμε, 48 βήματα και ο ρότορας θα κινείται 7,5 μοίρες με κάθε βήμα. Η λειτουργία ενός παλμού είναι κατάλληλη σε αυτή την περίπτωση.
Για να επιτευχθεί υψηλότερη ροπή, χρησιμοποιείται διπλός παλμός - ένας παλμός εφαρμόζεται ταυτόχρονα σε δύο παρακείμενα πηνία. Και αν για πλήρης στροφήΕάν χρειάζεστε 48 βήματα, τότε πάλι χρειάζεστε 48 από αυτούς τους διπλούς παλμούς, ο καθένας θα οδηγήσει σε ένα βήμα 7,5 μοιρών αλλά με 40% μεγαλύτερη ροπή σε σχέση με τη λειτουργία μονού παλμού. Συνδυάζοντας και τις δύο μεθόδους, μπορείτε να λάβετε 96 παλμούς διαιρώντας τα βήματα - παίρνετε 3,75 μοίρες ανά βήμα - αυτός είναι ένας συνδυασμένος τρόπος ελέγχου (μισό βήμα).
Να δουλεύει σχεδόν για όλους ηλεκτρικές συσκευές, απαιτούνται ειδικοί μηχανισμοί κίνησης. Προτείνουμε να εξετάσουμε τι είναι ένας βηματικός κινητήρας, ο σχεδιασμός, η αρχή λειτουργίας και τα διαγράμματα σύνδεσης.
Τι είναι ο βηματικός κινητήρας;
Ο βηματικός κινητήρας είναι ηλεκτρικό αυτοκίνητο, που προορίζεται για μετατροπή ηλεκτρική ενέργειαδίκτυα σε μηχανική ενέργεια. Δομικά, αποτελείται από περιελίξεις στάτορα και μαλακό μαγνητικό ή σκληρό μαγνητικό ρότορα. Ένα χαρακτηριστικό γνώρισμα ενός βηματικού κινητήρα είναι η διακριτή περιστροφή, στην οποία ένας δεδομένος αριθμός παλμών αντιστοιχεί σε έναν ορισμένο αριθμό βημάτων που γίνονται. Οι περισσότερες εφαρμογέςΤέτοιες συσκευές χρησιμοποιούνται σε μηχανές CNC, ρομποτική και συσκευές αποθήκευσης και ανάγνωσης πληροφοριών.
Σε αντίθεση με άλλους τύπους μηχανών, ένας βηματικός κινητήρας δεν περιστρέφεται συνεχώς, αλλά σε βήματα, από όπου προέρχεται και το όνομα της συσκευής. Κάθε τέτοιο βήμα είναι μόνο ένα κλάσμα της πλήρους επανάστασής του. Ο αριθμός των βημάτων που απαιτούνται για την πλήρη περιστροφή του άξονα θα ποικίλλει ανάλογα με το διάγραμμα σύνδεσης, τη μάρκα του κινητήρα και τη μέθοδο ελέγχου.
Πλεονεκτήματα και μειονεκτήματα ενός βηματικού κινητήρα
Τα πλεονεκτήματα της χρήσης ενός βηματικού κινητήρα περιλαμβάνουν:
- Στους βηματικούς κινητήρες, η γωνία περιστροφής αντιστοιχεί στον αριθμό των ηλεκτρικών σημάτων που παρέχονται, ενώ μετά τη διακοπή της περιστροφής, διατηρείται η πλήρης ροπή και η στερέωση.
- Ακριβής τοποθέτηση – παρέχει το 3 – 5% του ρυθμισμένου βήματος, το οποίο δεν συσσωρεύεται από βήμα σε βήμα.
- Παρέχει υψηλή ταχύτηταέναρξη, αντιστροφή, διακοπή?
- Είναι διαφορετικό υψηλή αξιοπιστίαλόγω της απουσίας εξαρτημάτων τριβής για τη συλλογή ρεύματος, σε αντίθεση με τους κινητήρες μεταγωγέα.
- Ο βηματικός κινητήρας δεν απαιτεί ανάδραση για τη θέση του.
- Μπορεί να παράγει χαμηλές ταχύτητες για φορτίο που εφαρμόζεται άμεσα χωρίς κιβώτια ταχυτήτων.
- Σχετικά χαμηλότερο κόστος σε σχέση με το ίδιο?
- Υπό την προϋπόθεση ευρύ φάσμαελέγξτε την ταχύτητα του άξονα αλλάζοντας τη συχνότητα των ηλεκτρικών παλμών.
Τα μειονεκτήματα της χρήσης ενός βηματικού κινητήρα περιλαμβάνουν:
- Ενδέχεται να προκύψει εφέ συντονισμού και ολίσθηση της βηματικής μονάδας.
- Υπάρχει πιθανότητα απώλειας ελέγχου λόγω έλλειψης ανατροφοδότησης.
- Η ποσότητα ηλεκτρικής ενέργειας που καταναλώνεται δεν εξαρτάται από την παρουσία ή την απουσία φορτίου.
- Δυσκολία στον έλεγχο λόγω της σχεδίασης του κυκλώματος
Σχεδιασμός και αρχή λειτουργίας
Ρύζι. 1. Αρχή λειτουργίας βηματικού κινητήραΤο σχήμα 1 δείχνει 4 περιελίξεις που ανήκουν στον στάτορα του κινητήρα και η διάταξη τους είναι διατεταγμένη έτσι ώστε να βρίσκονται σε γωνία 90º μεταξύ τους. Από το οποίο προκύπτει ότι ένα τέτοιο μηχάνημα χαρακτηρίζεται από μέγεθος βήματος 90º.
Όταν εφαρμόζεται τάση U1 στην πρώτη περιέλιξη, ο ρότορας κινείται κατά 90º. Στην περίπτωση εναλλακτικής παροχής τάσης U2, U3, U4 στις αντίστοιχες περιελίξεις, ο άξονας θα συνεχίσει να περιστρέφεται μέχρι την ολοκλήρωση ολόκληρος κύκλος. Μετά από αυτό ο κύκλος επαναλαμβάνεται ξανά. Για να αλλάξετε την φορά περιστροφής, αρκεί να αλλάξετε τη σειρά παροχής των παλμών στις αντίστοιχες περιελίξεις.
Τύποι βηματικών κινητήρων
Για την παροχή διάφορες παραμέτρουςεργασία, τόσο το μέγεθος του βήματος με το οποίο θα μετατοπιστεί ο άξονας όσο και η στιγμή που εφαρμόζεται για κίνηση είναι σημαντικά. Παραλλαγές σε αυτές τις παραμέτρους επιτυγχάνονται λόγω του σχεδιασμού του ίδιου του ρότορα, της μεθόδου σύνδεσης και του σχεδιασμού των περιελίξεων.
Με σχεδιασμό ρότορα
Το περιστρεφόμενο στοιχείο παρέχει μαγνητική αλληλεπίδραση με ηλεκτρομαγνητικό πεδίοστάτωρ. Ως εκ τούτου, ο σχεδιασμός του και τεχνικά χαρακτηριστικάκαθορίζει άμεσα τον τρόπο λειτουργίας και τις παραμέτρους περιστροφής της μονάδας βηματικής μονάδας. Για να προσδιορίσετε πρακτικά τον τύπο του βηματικού κινητήρα, με το δίκτυο απενεργοποιημένο, πρέπει να περιστρέψετε τον άξονα· εάν αισθάνεστε αντίσταση, αυτό υποδηλώνει την παρουσία μαγνήτη· διαφορετικά, πρόκειται για σχέδιο χωρίς μαγνητική αντίσταση.
Αντιδραστικός
Ένας αντιδραστικός βηματικός κινητήρας δεν είναι εξοπλισμένος με μαγνήτη στον ρότορα, αλλά είναι κατασκευασμένος από μαλακά μαγνητικά κράματα· κατά κανόνα, είναι κατασκευασμένος από πλάκες για τη μείωση των απωλειών επαγωγής. Το σχέδιο σε διατομή μοιάζει με γρανάζι με δόντια. Πολωνοί περιελίξεις στάτορατροφοδοτούνται από αντίθετα ζεύγη και δημιουργούν μια μαγνητική δύναμη για την κίνηση του ρότορα, ο οποίος κινείται λόγω εναλλασσόμενης ροής ηλεκτρικό ρεύμασε ζεύγη περιέλιξης.

Ένα σημαντικό πλεονέκτημα αυτού του σχεδίου κίνησης stepper είναι η απουσία ροπής ακινητοποίησης που δημιουργείται από το πεδίο σε σχέση με τον οπλισμό. Στην πραγματικότητα, αυτό είναι το ίδιο στο οποίο ο ρότορας περιστρέφεται σύμφωνα με το πεδίο του στάτορα. Το μειονέκτημα είναι η μείωση της ροπής. Βήμα για μηχανή αεροπλάνουκυμαίνεται από 5 έως 15°.
Με μόνιμους μαγνήτες
Σε αυτή την περίπτωση, το κινούμενο στοιχείο του βηματικού κινητήρα συναρμολογείται από μόνιμος μαγνήτης, που μπορεί να έχει δύο ή περισσότερους πόλους. Η περιστροφή του ρότορα εξασφαλίζεται από την έλξη ή την απώθηση των μαγνητικών πόλων από το ηλεκτρικό πεδίο όταν εφαρμόζεται τάση στις αντίστοιχες περιελίξεις. Για αυτό το σχέδιο, το γωνιακό βήμα είναι 45-90°.

Υβρίδιο
Σχεδιάστηκε για να ενώσει καλύτερες ιδιότητεςδύο προηγούμενα μοντέλα, λόγω του οποίου η μονάδα έχει μικρότερη γωνία και βήμα. Ο ρότορας του είναι κατασκευασμένος με τη μορφή κυλινδρικού μόνιμου μαγνήτη, ο οποίος μαγνητίζεται κατά μήκος του διαμήκους άξονα. Δομικά, μοιάζει με δύο στρογγυλούς πόλους, στην επιφάνεια των οποίων υπάρχουν δόντια του ρότορα από μαλακό μαγνητικό υλικό. Αυτή η λύση κατέστησε δυνατή την παροχή εξαιρετικής συγκράτησης και ροπής.

Τα πλεονεκτήματα ενός υβριδικού βηματικού κινητήρα είναι η υψηλή του ακρίβεια, η ομαλότητα και η ταχύτητα κίνησης, μικρά βήματα - από 0,9 έως 5°. Χρησιμοποιούνται για μηχανήματα CNC υψηλής τεχνολογίας, εξοπλισμό υπολογιστών και γραφείου και σύγχρονη ρομποτική. Το μόνο μειονέκτημαθεωρείται σχετικά υψηλό κόστος.
Για παράδειγμα, ας δούμε την επιλογή υβριδικών κινητήρων με 200 βήματα τοποθέτησης άξονα. Κατά συνέπεια, καθένας από τους κύλινδρους θα έχει 50 δόντια, ένα από αυτά είναι θετικός πόλος, ο δεύτερος είναι αρνητικός. Σε αυτή την περίπτωση, κάθε θετικό δόντι βρίσκεται απέναντι από την αυλάκωση στον αρνητικό κύλινδρο και αντίστροφα. Δομικά μοιάζει με αυτό:

Εξαιτίας αυτού, υπάρχουν 100 εναλλασσόμενοι πόλοι με εξαιρετική πολικότητα στον άξονα του βηματικού κινητήρα. Ο στάτορας έχει επίσης δόντια όπως φαίνεται στο σχήμα 6 παρακάτω, εκτός από τα κενά μεταξύ των εξαρτημάτων του.
 Ρύζι. 6. Αρχή λειτουργίας ενός υβριδικού βηματικού κινητήρα
Ρύζι. 6. Αρχή λειτουργίας ενός υβριδικού βηματικού κινητήρα Λόγω αυτού του σχεδιασμού, είναι δυνατό να επιτευχθεί μετατόπιση του ίδιου νότιου πόλου σε σχέση με τον στάτορα σε 50 διαφορετικές θέσεις. Λόγω της διαφοράς θέσης στη μισή θέση μεταξύ του βόρειου και του νότιου πόλου, επιτυγχάνεται η δυνατότητα κίνησης σε 100 θέσεις και η μετατόπιση φάσης κατά ένα τέταρτο της διαίρεσης καθιστά δυνατή την αύξηση του αριθμού των βημάτων λόγω διαδοχική διέγερσηδύο φορές ακόμη, δηλαδή έως 200 βήματα του γωνιακού άξονα ανά 1 περιστροφή.
Δώστε προσοχή στο σχήμα 6, η αρχή λειτουργίας ενός τέτοιου βηματικού κινητήρα είναι ότι όταν τροφοδοτείται ρεύμα σε ζεύγη σε αντίθετες περιελίξεις, οι αντίθετοι πόλοι του ρότορα, που βρίσκονται πίσω από τα δόντια του στάτορα, έλκονται μεταξύ τους και οι παρόμοιοι πόλοι εισέρχονται μπροστά τους προς την κατεύθυνση της περιστροφής, απωθούνται.
Ανά τύπο περιελίξεων
Στην πράξη, ένας βηματικός κινητήρας είναι ένας πολυφασικός κινητήρας. Η ομαλότητα της λειτουργίας στην οποία εξαρτάται άμεσα από τον αριθμό των περιελίξεων - όσο περισσότερες είναι, τόσο πιο ομαλή γίνεται η περιστροφή, αλλά και τόσο υψηλότερο είναι το κόστος. Σε αυτή την περίπτωση, η ροπή δεν αυξάνεται από τον αριθμό των φάσεων, αν και για κανονική λειτουργία ο ελάχιστος αριθμός τους στον στάτορα του ηλεκτροκινητήρα πρέπει να είναι τουλάχιστον δύο. Ο αριθμός των φάσεων δεν καθορίζει τον αριθμό των περιελίξεων, επομένως ένας βηματικός κινητήρας δύο φάσεων μπορεί να έχει τέσσερις ή περισσότερες περιελίξεις.
Μονοπολικό
Ένας μονοπολικός βηματικός κινητήρας διαφέρει στο ότι το διάγραμμα σύνδεσης περιέλιξης έχει μια διακλάδωση από το μεσαίο σημείο. Αυτό καθιστά εύκολη την αλλαγή των μαγνητικών πόλων. Το μειονέκτημα αυτής της σχεδίασης είναι ότι χρησιμοποιούνται μόνο οι μισές από τις διαθέσιμες στροφές, με αποτέλεσμα να επιτυγχάνεται λιγότερη ροπή. Ως εκ τούτου, διακρίνονται για τις μεγάλες διαστάσεις τους.

Για να χρησιμοποιήσετε την πλήρη ισχύ του πηνίου, ο μεσαίος ακροδέκτης παραμένει ασύνδετος. Εξετάστε τα σχέδια των μονοπολικών μονάδων· μπορεί να περιέχουν 5 και 6 καλώδια. Ο αριθμός τους θα εξαρτηθεί από το αν το μεσαίο καλώδιο βγαίνει ξεχωριστά από κάθε τύλιγμα κινητήρα ή εάν είναι συνδεδεμένα μεταξύ τους.

Διπολικός
Ο διπολικός βηματικός κινητήρας συνδέεται με τον ελεγκτή μέσω 4 ακίδων. Σε αυτή την περίπτωση, οι περιελίξεις μπορούν να συνδεθούν εσωτερικά τόσο σε σειρά όσο και παράλληλα. Εξετάστε ένα παράδειγμα της δουλειάς του στο σχήμα.

Στο διάγραμμα σχεδιασμού ενός τέτοιου κινητήρα βλέπετε μια περιέλιξη διέγερσης σε κάθε φάση. Εξαιτίας αυτού, η αλλαγή της κατεύθυνσης του ρεύματος απαιτεί χρήση ηλεκτρονικό κύκλωμαειδικά προγράμματα οδήγησης (ηλεκτρονικά τσιπ σχεδιασμένα για έλεγχο). Ένα παρόμοιο αποτέλεσμα μπορεί να επιτευχθεί με την ενεργοποίηση της γέφυρας H. Σε σύγκριση με την προηγούμενη, η διπολική συσκευή παρέχει την ίδια ροπή με πολύ μικρότερες διαστάσεις.
Σύνδεση βηματικού κινητήρα
Για να τροφοδοτήσετε τις περιελίξεις, θα χρειαστείτε μια συσκευή ικανή να παρέχει έναν παλμό ελέγχου ή μια σειρά παλμών σε μια συγκεκριμένη σειρά. Τέτοια μπλοκ είναι συσκευές ημιαγωγώνγια σύνδεση βηματικού κινητήρα, προγραμμάτων οδήγησης μικροεπεξεργαστή. Τα οποία έχουν ένα σύνολο ακροδεκτών εξόδου, καθένας από αυτούς καθορίζει τη μέθοδο τροφοδοσίας και τον τρόπο λειτουργίας.
Ανάλογα με το διάγραμμα σύνδεσης, θα πρέπει να χρησιμοποιείται η μία ή η άλλη έξοδος της βηματικής μονάδας. Με διαφορετικές επιλογές για τη σύνδεση ορισμένων ακροδεκτών στο σήμα εξόδου συνεχές ρεύμαεπιτυγχάνεται μια ορισμένη ταχύτητα περιστροφής, βήμα ή μικροβήμα γραμμικής κίνησης στο επίπεδο. Δεδομένου ότι ορισμένες εργασίες απαιτούν χαμηλή συχνότητα, ενώ άλλες απαιτούν υψηλή, ο ίδιος κινητήρας μπορεί να ρυθμίσει την παράμετρο σε βάρος του οδηγού.
Τυπικά διαγράμματα σύνδεσης SD
Ανάλογα με τον αριθμό των ακίδων που υπάρχουν σε έναν συγκεκριμένο βηματικό κινητήρα: 4, 6 ή 8 ακίδες, η δυνατότητα χρήσης ενός ή άλλου διαγράμματος σύνδεσης θα διαφέρει επίσης. Κοιτάξτε τις εικόνες, φαίνονται εδώ τυπικές επιλογές stepper σύνδεση:
 Διαγράμματα σύνδεσης διάφοροι τύποιβηματικούς κινητήρες
Διαγράμματα σύνδεσης διάφοροι τύποιβηματικούς κινητήρες Υπό την προϋπόθεση ότι οι κύριοι πόλοι της μηχανής βηματικού μηχανήματος τροφοδοτούνται από τον ίδιο οδηγό, σύμφωνα με αυτά τα διαγράμματα μπορούν να σημειωθούν τα ακόλουθα: χαρακτηριστικά γνωρίσματαέργα:
- Τα καλώδια συνδέονται σαφώς με τους αντίστοιχους ακροδέκτες της συσκευής. Κατά τη σύνδεση των περιελίξεων σε σειρά, η αυτεπαγωγή των περιελίξεων αυξάνεται, αλλά το ρεύμα μειώνεται.
- Παρέχει αξία διαβατηρίου Ηλεκτρικά Χαρακτηριστικά. Στο παράλληλο κύκλωμαΤο ρεύμα αυξάνεται και η επαγωγή μειώνεται.
- Κατά τη σύνδεση μιας φάσης ανά περιέλιξη, η ροπή μειώνεται κατά χαμηλές στροφέςκαι μειώνει το μέγεθος των ρευμάτων.
- Όταν είναι συνδεδεμένο, όλα ηλεκτρικά και δυναμικά χαρακτηριστικάΣύμφωνα με το διαβατήριο, ονομαστικά ρεύματα. Το σύστημα ελέγχου είναι πολύ απλοποιημένο.
- Παράγει πολύ περισσότερη ροπή και χρησιμοποιείται για υψηλές ταχύτητες περιστροφής.
- Όπως και το προηγούμενο, προορίζεται να αυξήσει τη ροπή, αλλά χρησιμοποιείται για χαμηλές συχνότητεςπεριστροφή.
Έλεγχος βηματικού κινητήρα
Η εκτέλεση λειτουργιών με μονάδα stepper μπορεί να πραγματοποιηθεί χρησιμοποιώντας διάφορες μεθόδους. Καθένα από τα οποία διαφέρει στον τρόπο με τον οποίο παρέχει σήματα σε ζεύγη πόλων. Συνολικά, υπάρχει μια σειρά από μεθόδους ενεργοποίησης περιέλιξης.
Κύμα– σε αυτόν τον τρόπο λειτουργίας, διεγείρεται μόνο μία περιέλιξη, προς την οποία έλκονται οι πόλοι του ρότορα. Ταυτόχρονα, ο βηματικός κινητήρας δεν είναι ικανός να τραβήξει μεγάλο φορτίο, αφού παράγει μόνο τη μισή ροπή.

Πλήρες βήμα— σε αυτόν τον τρόπο λειτουργίας, συμβαίνει ταυτόχρονη εναλλαγή φάσης, δηλαδή διεγείρονται και τα δύο ταυτόχρονα. Εξαιτίας της οποίας εξασφαλίζεται η μέγιστη ροπή, σε περίπτωση παράλληλης σύνδεσης ή σύνδεσης σε σειρά των περιελίξεων, θα δημιουργηθεί η μέγιστη τάση ή ρεύμα.

Μισό βήμα– είναι ένας συνδυασμός των δύο προηγούμενων μεθόδων αλλαγής περιελίξεων. Κατά την εφαρμογή του οποίου στον βηματικό κινητήρα, η τάση τροφοδοτείται εναλλάξ πρώτα σε ένα πηνίο και στη συνέχεια σε δύο ταυτόχρονα. Αυτό εξασφαλίζει καλύτερη στερέωση μέγιστες ταχύτητεςκαι περισσότερα βήματα.

Για πιο ήπιο έλεγχο και υπέρβαση της αδράνειας του δρομέα, χρησιμοποιείται έλεγχος μικροβήματος, όταν το ημιτονοειδές κύμα του σήματος εκτελείται με παλμούς μικροβήματος. Εξαιτίας αυτού, οι δυνάμεις αλληλεπίδρασης των μαγνητικών κυκλωμάτων στον βηματικό κινητήρα λαμβάνουν μια πιο ομαλή αλλαγή και, ως αποτέλεσμα, ο ρότορας κινείται μεταξύ των πόλων. Σας επιτρέπει να μειώσετε σημαντικά τα τραντάγματα του βηματικού κινητήρα.
Χωρίς ελεγκτή
Για οδήγηση κινητήρες χωρίς ψήκτρεςΧρησιμοποιείται το σύστημα H-bridge. Το οποίο σας επιτρέπει να αλλάξετε την πολικότητα για να αντιστρέψετε τον βηματικό κινητήρα. Μπορεί να εκτελεστεί σε τρανζίστορ ή μικροκυκλώματα που δημιουργούν μια λογική αλυσίδα για την κίνηση των πλήκτρων.

Όπως μπορείτε να δείτε, η τάση τροφοδοτείται στη γέφυρα από την πηγή ισχύος V. Όταν οι επαφές S1 – S4 ή S3 – S2 συνδέονται ανά ζεύγη, το ρεύμα θα ρέει μέσω των περιελίξεων του κινητήρα. Το οποίο θα προκαλέσει περιστροφή προς τη μία ή την άλλη κατεύθυνση.
Με χειριστήριο
Η συσκευή ελεγκτή σάς επιτρέπει να ελέγχετε τον βηματικό κινητήρα μέσα διάφορους τρόπους λειτουργίας. Ο ελεγκτής βασίζεται σε την ηλεκτρονική μονάδα, σχηματίζοντας ομάδες σημάτων και η αλληλουχία τους αποστέλλεται στα πηνία του στάτορα. Για να αποφευχθεί η πιθανότητα βλάβης εάν βραχυκύκλωμαΉ άλλο κατάσταση έκτακτης ανάγκηςΣτον ίδιο τον κινητήρα, κάθε ακροδέκτης προστατεύεται από μια δίοδο, η οποία δεν επιτρέπει σε παλμό να περάσει προς την αντίθετη κατεύθυνση.
 Σύνδεση μέσω μονοπολικού ελεγκτή βηματικού κινητήρα
Σύνδεση μέσω μονοπολικού ελεγκτή βηματικού κινητήρα Δημοφιλή συστήματα ελέγχου κινητήρα
 Κύκλωμα ελέγχου από ελεγκτή με διαφορική έξοδο
Κύκλωμα ελέγχου από ελεγκτή με διαφορική έξοδο Είναι ένας από τους πιο ανθεκτικούς στο θόρυβο τρόπους εργασίας. Σε αυτή την περίπτωση, το άμεσο και το αντίστροφο σήμα συνδέονται απευθείας με τους αντίστοιχους πόλους. Σε ένα τέτοιο κύκλωμα, πρέπει να χρησιμοποιείται θωράκιση του αγωγού σήματος. Ιδανικό για φορτία χαμηλής ισχύος.
 Κύκλωμα ελέγχου από ελεγκτή με έξοδο τύπου «ανοιχτού συλλέκτη».
Κύκλωμα ελέγχου από ελεγκτή με έξοδο τύπου «ανοιχτού συλλέκτη». Σε αυτό το κύκλωμα συνδυάζονται οι θετικές είσοδοι του ελεγκτή, οι οποίες συνδέονται με τον θετικό πόλο. Σε περίπτωση τροφοδοσίας άνω των 9 V, πρέπει να συμπεριληφθεί ειδική αντίσταση στο κύκλωμα για περιορισμό του ρεύματος. Σας επιτρέπει να ορίσετε απαιτούμενο ποσόβήματα με αυστηρά ρυθμίστε την ταχύτητα, προσδιορίζει την επιτάχυνση κ.λπ.
Το απλούστερο πρόγραμμα οδήγησης βηματικού κινητήρα DIY
Για τη συναρμολόγηση ενός κυκλώματος προγράμματος οδήγησης στο σπίτι, ορισμένα στοιχεία από παλιούς εκτυπωτές, υπολογιστές και άλλο εξοπλισμό μπορεί να είναι χρήσιμα. Θα χρειαστείτε τρανζίστορ, διόδους, αντιστάσεις (R) και ένα μικροκύκλωμα (RG).

Για να δημιουργήσετε ένα πρόγραμμα, καθοδηγηθείτε από την ακόλουθη αρχή: όταν μια λογική μονάδα εφαρμόζεται σε έναν από τους ακροδέκτες D (οι άλλοι σηματοδοτούν μηδέν), το τρανζίστορ ανοίγει και το σήμα περνά στο πηνίο του κινητήρα. Έτσι ολοκληρώνεται ένα βήμα.
Με βάση το διάγραμμα, α πλακέτα τυπωμένου κυκλώματος, που μπορείτε να δοκιμάσετε να φτιάξετε μόνοι σας ή να φτιάξετε κατόπιν παραγγελίας. Μετά από αυτό, τα αντίστοιχα εξαρτήματα συγκολλούνται στην πλακέτα. Η συσκευή είναι σε θέση να ελέγχει συσκευή stepperαπό τον οικιακό σας υπολογιστή συνδέοντας σε μια κανονική θύρα USB.