इलेक्ट्रिक ड्राईव्हच्या फ्रिक्वेंसी कंट्रोलची रचना करताना, इंजिनमध्ये चालू असलेल्या इलेक्ट्रोमेकॅनिकल प्रक्रियेचे तपशील पूर्णपणे विचारात घेणारे पुरेसे मॉडेल तयार करणे आवश्यक आहे. मॉडेल्सची चाचणी घेण्यासाठी, वास्तविक उपकरणांवर प्रत्यक्षरित्या लागू केलेल्या प्रक्रियेशी त्यांची तुलना करणे आवश्यक आहे, या संदर्भात, पर्याप्ततेसाठी मॉडेल तपासण्यासाठी वास्तविक इलेक्ट्रिक मोटर्सचे मापदंड निर्धारित करणे आवश्यक आहे; लेखात असिंक्रोनस इलेक्ट्रिक मोटरच्या वेक्टर नियंत्रणाच्या गणितीय मॉडेलचे वर्णन केले आहे. मॉडेल आपल्याला त्याच्या ऑपरेशन दरम्यान इलेक्ट्रिक मोटरमधील इलेक्ट्रोमेकॅनिकल प्रक्रियांचे निरीक्षण करण्यास अनुमती देते. इलेक्ट्रिक मोटरच्या स्टार्ट-अपचे वैशिष्ट्य दर्शविणारे यांत्रिक आणि विद्युत क्षणिक प्रक्रियांचे आलेख प्राप्त झाले. वेक्टर कंट्रोलसह इलेक्ट्रिक मोटरचे एक यांत्रिक वैशिष्ट्य तयार केले गेले आहे, जे स्पष्टपणे लोड श्रेणीतील वाढ दर्शविते. मॉडेलच्या पर्याप्ततेचे मूल्यांकन केले गेले. गणितीय प्रयोग आणि मॉडेल तयार करणे ग्राफिकल सिम्युलेशन वातावरणात सिमुलिंक, मॅटलाब पॅकेजसाठी एक ऍप्लिकेशनमध्ये केले गेले.
इन्व्हर्टर
गणितीय मॉडेल
यांत्रिक वैशिष्ट्ये
वेक्टर नियंत्रण
असिंक्रोनस मोटर
1. विनोग्राडोव्ह ए.बी. AC इलेक्ट्रिक ड्राईव्हचे वेक्टर नियंत्रण / Ivanovo State Energy University चे नाव V.I. लेनिन". - इव्हानोवो, 2008. - 297 पी.
2. लिखोदेडोव्ह ए.डी. एसिंक्रोनस मोटरच्या यांत्रिक वैशिष्ट्यांचे बांधकाम आणि त्याची चाचणी // विज्ञान आणि शिक्षणाच्या आधुनिक समस्या. – 2012. – क्रमांक 5. – URL: http://www..09.2012).
3. उसोलत्सेव्ह ए.ए. असिंक्रोनस मोटर्सचे वेक्टर नियंत्रण: इलेक्ट्रोमेकॅनिकल सायकलच्या विषयांवर एक पाठ्यपुस्तक. - सेंट पीटर्सबर्ग, 2002.
4. शुवालोव जी.ए. फ्रिक्वेन्सी कन्व्हर्टर वापरून वीज बचत करणे // इलेक्ट्रिकल उपकरणे: ऑपरेशन आणि दुरुस्ती. - 2012. - क्रमांक 2.
5. ब्लाश्के, एफ. दास प्रिंझिप डर फेल्डोरिएंटियरंग, डाय ग्रुंडलेज फर डाय ट्रान्सव्हेक्टर-रेजेलंग वॉन ड्रेहफेल्डमाशिनेन (जर्मन भाषेत), सीमेन्स-झेइटस्क्रिफ्ट 45, हेफ्ट 10, 1971.
6. पीएलसी - हे सोपे आहे!! वेक्टर नियंत्रण. – URL: http://plc24.ru/vektornoe-upravlenie/ (प्रवेशाची तारीख: 09/12/2012).
वेक्टर नियंत्रणासह असिंक्रोनस इलेक्ट्रिक ड्राइव्हचा विकास
एसी इलेक्ट्रिक ड्राईव्ह नियंत्रित करण्याच्या दोन मुख्य पद्धतींमध्ये फरक करणे प्रथा आहे जे सेमीकंडक्टर फ्रिक्वेंसी कन्वर्टर्स ऊर्जा कन्व्हर्टर म्हणून वापरतात: वारंवारता आणि वेक्टर.
वारंवारता नियंत्रणासह, वारंवारता नियंत्रणाचा एक स्थिर नियम इलेक्ट्रिक ड्राइव्हमध्ये लागू केला जातो (उदाहरणार्थ, इ.). कंट्रोल सिस्टमच्या आउटपुटवर, इन्व्हर्टरच्या आउटपुट व्होल्टेजची वारंवारता आणि मोठेपणा यासाठी एक कार्य व्युत्पन्न केले जाते. अशा सिस्टम्सच्या वापराची व्याप्ती: एसिंक्रोनस इलेक्ट्रिक ड्राइव्ह, ज्यामध्ये स्थिर आणि गतिशील आवश्यकता, पंखे, पंप आणि इतर सामान्य औद्योगिक यंत्रणा नाहीत.
वेक्टर कंट्रोलसह, व्हेरिएबल्सच्या तात्कालिक मूल्यांवर आधारित नियंत्रण केले जाते. डिजिटल व्हेक्टर सिस्टीममध्ये, समतुल्य (नियंत्रण स्वतंत्र मध्यांतरावर सरासरी) व्हेरिएबल्स वापरून नियंत्रण केले जाऊ शकते.
1971 मध्ये, ब्लॅशके यांनी एसिंक्रोनस मोटरसाठी नियंत्रण प्रणाली तयार करण्याचे तत्त्व प्रस्तावित केले, ज्यामध्ये रोटर फ्लक्स लिंकेजसह समन्वय प्रणालीच्या अभिमुखतेसह मोटरचे वेक्टर मॉडेल वापरले गेले. या तत्त्वाला डायरेक्ट टॉर्क कंट्रोल देखील म्हणतात. वेक्टर नियंत्रण आपल्याला नियंत्रण श्रेणी, नियंत्रण अचूकता आणि इलेक्ट्रिक ड्राइव्हची गती लक्षणीय वाढविण्यास अनुमती देते. ही पद्धत मोटर टॉर्कचे थेट नियंत्रण प्रदान करते.
टॉर्क स्टेटर करंटद्वारे निर्धारित केला जातो, जो एक रोमांचक चुंबकीय क्षेत्र तयार करतो. टॉर्क थेट नियंत्रित करताना, मोठेपणा व्यतिरिक्त, स्टेटर करंटचा टप्पा, म्हणजेच वर्तमान वेक्टर बदलणे आवश्यक आहे. येथूनच "वेक्टर कंट्रोल" हा शब्द आला आहे.
वर्तमान वेक्टर नियंत्रित करण्यासाठी, आणि परिणामी, फिरत्या रोटरच्या सापेक्ष स्टेटर चुंबकीय प्रवाहाची स्थिती, कोणत्याही वेळी रोटरची अचूक स्थिती जाणून घेणे आवश्यक आहे. एकतर बाह्य रोटर पोझिशन सेन्सर वापरून किंवा इतर इंजिन पॅरामीटर्स वापरून गणना करून रोटरची स्थिती निश्चित करून समस्या सोडवली जाते. स्टेटर विंडिंगचे प्रवाह आणि व्होल्टेज हे पॅरामीटर्स म्हणून वापरले जातात.
स्पीड फीडबॅक सेन्सरशिवाय व्हेक्टर कंट्रोलसह व्हेरिएबल फ्रिक्वेंसी ड्राइव्ह कमी खर्चिक आहे, परंतु व्हेक्टर कंट्रोलसाठी फ्रिक्वेन्सी कन्व्हर्टरकडून मोठ्या प्रमाणात आणि उच्च गतीची गणना आवश्यक आहे. याव्यतिरिक्त, कमी, शून्य रोटेशन गतीच्या जवळ थेट टॉर्क नियंत्रणासाठी, गती अभिप्रायाशिवाय व्हेरिएबल वारंवारता इलेक्ट्रिक ड्राइव्हचे ऑपरेशन अशक्य आहे. स्पीड फीडबॅक सेन्सरसह वेक्टर कंट्रोल 1:1000 पर्यंत आणि त्याहून अधिक नियंत्रण श्रेणी प्रदान करते, वेग नियंत्रण अचूकता टक्केवारीच्या शंभरावा भाग आहे, टॉर्क अचूकता काही टक्के आहे.
व्हेक्टर कंट्रोल मोडमध्ये IM आणि SM चा वीज पुरवठा इन्व्हर्टरमधून केला जातो, जो कोणत्याही वेळी स्टेटर व्होल्टेज (किंवा वर्तमान) व्हेक्टरची आवश्यक मोठेपणा आणि कोनीय स्थिती प्रदान करू शकतो. रोटर फ्लक्स लिंकेज व्हेक्टरचे मोठेपणा आणि स्थान निरीक्षक वापरून मोजले जाते (एक गणितीय उपकरण जे एखाद्याला सिस्टमचे न मोजलेले पॅरामीटर्स पुनर्संचयित करण्यास अनुमती देते). इलेक्ट्रिक ड्राइव्हच्या ऑपरेटिंग परिस्थितीनुसार, इलेक्ट्रिक मोटरला सामान्य अचूकतेसह आणि गती किंवा टॉर्क टास्कच्या प्रक्रियेच्या वाढीव अचूकतेसह मोडमध्ये नियंत्रित करणे शक्य आहे. उदाहरणार्थ, फ्रिक्वेन्सी कन्व्हर्टर ±0.2% च्या स्पीड सेन्सरशिवाय वेक्टर कंट्रोलसह, स्पीड सेन्सरसह पूर्ण वेक्टर कंट्रोलसह ± ची अचूकता, U/f मोडमध्ये ±2-3% ची रोटेशन गती राखण्याची अचूकता प्रदान करते 0.01% प्रदान केले आहे.
IM च्या वेक्टर नियंत्रणाचे सामान्य तत्त्व
भविष्यात, आम्ही समन्वय प्रणालीचे खालील निर्देशांक वापरू: a-b - स्थिर समन्वय प्रणाली (), स्टेटर विंडिंगच्या फेज a च्या अक्षावर केंद्रित; x-y - रोटर () सह समकालिकपणे फिरणारी समन्वय प्रणाली आणि त्याच्या वळणाच्या फेज अक्ष a च्या बाजूने ओरिएंटेड; d-q - रोटर फ्लक्स लिंकेज () सह समकालिकपणे फिरणारी समन्वय प्रणाली आणि त्याच्या दिशेने केंद्रित; m-n ही अनियंत्रित गतीने फिरणारी अनियंत्रित दिशानिर्देशक प्रणाली आहे.
IM नियंत्रण प्रणालीचे मॉडेलिंग आणि बांधणीचे सामान्य तत्त्व असे आहे की या उद्देशासाठी एक समन्वय प्रणाली वापरली जाते, जी विद्युत चुंबकीय टॉर्क निर्धारित करणाऱ्या कोणत्याही वेक्टरच्या दिशेने सतत केंद्रित असते. मग या वेक्टरचे इतर समन्वय अक्षावर प्रक्षेपण आणि इलेक्ट्रोमॅग्नेटिक टॉर्कच्या अभिव्यक्तीतील संबंधित पद शून्याच्या बरोबरीचे असेल आणि औपचारिकपणे ते डीसी मोटरच्या इलेक्ट्रोमॅग्नेटिक टॉर्कच्या अभिव्यक्तीसारखेच एक स्वरूप घेते, जे आनुपातिक असते. आर्मेचर करंट आणि मुख्य चुंबकीय प्रवाहाच्या परिमाणात.
रोटर फ्लक्स लिंकेजसह समन्वय प्रणालीच्या अभिमुखतेच्या बाबतीत ( ![]() ) क्षण असे दर्शविले जाऊ शकते:
) क्षण असे दर्शविले जाऊ शकते:
![]() , (1)
, (1)
रोटर सर्किटचे लीकेज इंडक्टन्स कुठे आहे, मॅग्नेटायझेशन सर्किटचे इंडक्टन्स आहे, ध्रुव जोड्यांची संख्या आहे आणि कोऑर्डिनेट सिस्टीमच्या अक्षांवर स्टेटर प्रवाहांचे प्रक्षेपण आहे.
या अभिव्यक्तीचा वापर करून, आडवा अक्षावर स्टेटर करंटचे प्रक्षेपण बदलून इलेक्ट्रोमॅग्नेटिक टॉर्क नियंत्रित करण्यासाठी रोटर फ्लक्स लिंकेज स्थिर असेल तर शक्य आहे. नियंत्रण प्रणाली तयार करण्यासाठी समीकरणाची निवड मोठी भूमिका बजावते, कारण अनेक प्रमाणात, विशेषत: शॉर्ट सर्किट झालेल्या रक्तदाबासाठी, मोजता येत नाही. याव्यतिरिक्त, ही निवड सिस्टम ट्रान्सफर फंक्शन्सच्या जटिलतेवर लक्षणीय परिणाम करते, कधीकधी समीकरणांचा क्रम अनेक वेळा वाढवते.
IM वेक्टर कंट्रोल सिस्टीम तयार करण्यासाठी, तुम्हाला वेक्टर निवडणे आवश्यक आहे ज्याच्या सापेक्ष समन्वय प्रणाली ओरिएंटेड असेल आणि इलेक्ट्रोमॅग्नेटिक टॉर्कसाठी संबंधित अभिव्यक्ती, आणि नंतर स्टेटर आणि/किंवा यांच्या समीकरणांवरून त्यात समाविष्ट केलेले प्रमाण निश्चित करा. रोटर सर्किट (2):
![]() , (2, a)
, (2, a)
![]() , (2, b)
, (2, b)
वेक्टर स्वरूपात स्टेटर विंडिंग्जचे व्होल्टेज कुठे आहे; - स्टेटर आणि रोटर विंडिंगचा सक्रिय प्रतिकार; घटक कालांतराने प्रवाहांमध्ये बदल झाल्यामुळे प्रवाहाच्या जोडणीतील बदलांशी संबंधित असतात आणि संबंधित इलेक्ट्रिक मशीनमधील उत्तेजित होण्याच्या प्रक्रियेशी साधर्म्य ठेवून त्यांना ट्रान्सफॉर्मेशन ईएमएफ म्हणतात; घटक , - रोटर रोटेशनमुळे फ्लक्स लिंकेजमधील बदलाशी संबंधित असतात आणि त्यांना रोटेशनल ईएमएफ म्हणतात.
जर आपण संदर्भ वेक्टर म्हणून रोटर फ्लक्स लिंकेज निवडले आणि त्याच्या बाजूने कोऑर्डिनेट सिस्टमला दिशा दिली जेणेकरून त्याचा वास्तविक अक्ष दिशेशी एकरूप होईल, तर समन्वय प्रणालीच्या रोटेशनची कोणीय वारंवारता स्टेटर पुरवठ्याच्या कोणीय वारंवारतेइतकी असेल, पासून स्टेटर आणि रोटरचे फ्लक्स वेक्टर एकाच वारंवारतेने फिरतात. रोटर फ्लक्स लिंकेज वेक्टरचा वापर सैद्धांतिकदृष्ट्या IM ची जास्त ओव्हरलोड क्षमता प्रदान करतो.
या प्रकरणात, स्टेटर करंट वेक्टरचे अंदाज, हे तथ्य लक्षात घेऊन , समान आहेत:
![]() (3)
(3)
रोटरचा इलेक्ट्रोमॅग्नेटिक वेळ स्थिर कुठे आहे.
फ्लक्स लिंकेज आणि रोटरची कोनीय वारंवारता व्यक्त करूया:
![]() (4)
(4)
अशाप्रकारे, स्टेटर करंटच्या प्रक्षेपणाचा वापर करून, रोटर फ्लक्स लिंकेज नियंत्रित केले जाऊ शकते आणि या चॅनेलचे हस्तांतरण कार्य रोटर टाइम कॉन्स्टंटच्या बरोबरीने वेळ स्थिर असलेल्या एपिरिओडिक लिंकशी संबंधित आहे; आणि प्रोजेक्शनच्या मदतीने रोटर वारंवारता स्वतंत्रपणे आणि जडत्व-मुक्त नियंत्रित करणे शक्य आहे.
या प्रकरणात, दिलेल्या फ्लक्स लिंकेजसाठी रोटर प्रवाहांची वारंवारता जाणून घेऊन IM चा इलेक्ट्रोमॅग्नेटिक टॉर्क निर्धारित केला जाऊ शकतो:
![]() , (5)
, (5)
अभिव्यक्ती - समन्वय अक्ष, फ्लक्स लिंकेज, रोटर वारंवारता आणि IM च्या इलेक्ट्रोमॅग्नेटिक टॉर्कवरील स्टेटर करंटच्या अंदाजांमधील संबंध निश्चित करा. गतीच्या अभिव्यक्ती आणि समीकरणावरून असे दिसून येते की टॉर्क दोन इनपुट सिग्नलद्वारे जडत्व-मुक्त नियंत्रित केला जाऊ शकतो: फ्लक्स लिंकेज आणि रोटर वारंवारता. हे सिग्नल अभिव्यक्तींद्वारे स्टेटर करंट वेक्टरच्या अंदाजांशी संबंधित आहेत. म्हणून, वेक्टर कंट्रोल डिव्हाइसमध्ये एक समन्वय डीकपलिंग युनिट (RC) असतो, जो अभिव्यक्ती (3) नुसार परिवर्तन करतो, तसेच एक रोटेटर असतो जो स्टेटर करंट वेक्टरला IM रोटरच्या रोटेशनच्या विरुद्ध दिशेने फिरवतो. कंट्रोल डिव्हाईससाठी इनपुट सिग्नल रेखीय नेटवर्क व्होल्टेज आणि पुरवठा व्होल्टेजची वारंवारता, फ्लक्स लिंकेज आणि रोटर वारंवारता यांच्याशी संबंधित असेल. कोऑर्डिनेट डीकपलिंग ब्लॉकचे नाव स्टेटर करंट वेक्टर (आकृती 1) च्या स्वतंत्र (डीकपल्ड, विभक्त) अंदाजांशी संबंधित सिग्नल निर्माण करण्याच्या त्याच्या कार्यावरून येते.

तांदूळ. 1. समन्वय डीकपलिंग ब्लॉकचा ब्लॉक आकृती.
इलेक्ट्रोमॅग्नेटिक टॉर्क (5) आणि गतीच्या सामान्य समीकरणाच्या अभिव्यक्तीवरून, आम्ही रोटर वारंवारता नियंत्रण चॅनेलद्वारे IM चे हस्तांतरण कार्य प्राप्त करू शकतो:
यांत्रिक वेळ स्थिर कुठे आहे. हे हस्तांतरण कार्य डीसी मोटरशी पूर्णपणे सुसंगत आहे, म्हणून आयएमच्या वेक्टर नियंत्रणासह इलेक्ट्रिक ड्राइव्ह सिस्टमचे बांधकाम डीसी ड्राइव्हपेक्षा वेगळे नाही.
हे लक्षात घ्यावे की कंट्रोल डिव्हाइस केवळ त्याच्या लिंक्सच्या ट्रान्सफर फंक्शन्समध्ये समाविष्ट केलेले IM पॅरामीटर्स खऱ्या मूल्यांशी संबंधित असल्याच्या स्थितीवर त्याचे कार्य करू शकते, अन्यथा IM आणि कंट्रोल डिव्हाइसमध्ये फ्लक्स लिंकेज आणि रोटर वारंवारता कमी होईल. एकमेकांपासून वेगळे. सराव मध्ये वेक्टर नियंत्रण प्रणाली लागू करताना ही परिस्थिती लक्षणीय अडचणी निर्माण करते, कारण ऑपरेशन दरम्यान रक्तदाब मापदंड बदलतात. हे विशेषतः सक्रिय प्रतिकारांच्या मूल्यांवर लागू होते.
समन्वय परिवर्तनांचे गणितीय वर्णन
जर वर्तमान सदिश निश्चित समन्वय प्रणाली (a, b) मध्ये दर्शविला असेल, तर नवीन समन्वय प्रणाली (x,y) मध्ये संक्रमण, मूळच्या सापेक्ष विशिष्ट कोनातून (आकृती 2a) फिरवले जाते. जटिल संख्यांच्या वितर्कांचा खालील संबंध:
किंवा ![]() (7)
(7)

तांदूळ. 2. विविध समन्वय प्रणालींमध्ये सामान्यीकृत वर्तमान वेक्टर.
स्थिर कोनीय वारंवारतेसह फिरणाऱ्या समन्वय प्रणालीसाठी, कोन बरोबर असतो.
समन्वय परिवर्तन विस्तारित स्वरूपात खालीलप्रमाणे लिहिले जाऊ शकते:
येथून तुम्ही वेक्टरचे घटक मॅट्रिक्स स्वरूपात शोधू शकता:
![]() , (9)
, (9)
जेथे , संबंधित विंडिंग्सच्या प्रवाहांची तात्काळ मूल्ये आहेत.
IM वेक्टर कंट्रोल सिस्टीमचा एक आवश्यक घटक म्हणजे रोटेटर जो वेक्टर निर्देशांक अभिव्यक्तीनुसार बदलतो (9).
समन्वय प्रणाली (d, q) वरून समन्वय प्रणाली (a, b) मध्ये चलांचे रूपांतर करण्यासाठी, आम्ही खालील समीकरणे वापरतो:
जेथे γ फील्ड ओरिएंटेशन कोन आहे. रोटेटरचा ब्लॉक आकृती आकृती 3 मध्ये दर्शविला आहे.

तांदूळ. 3. रोटेटरचा ब्लॉक आकृती.
रक्तदाबाचे गणितीय मॉडेल
एसिंक्रोनस मोटर समन्वय प्रणालीमध्ये मॉडेल केली जाते - α, β. या समन्वय प्रणालीशी संबंधित समीकरणे समीकरणांच्या प्रणालीद्वारे वर्णन केली जातात:
 (11)
(11)
जेथे: , , , - समन्वय प्रणालीमधील स्टेटर आणि रोटर फ्लक्स लिंकेज वेक्टरचे घटक; , - समन्वय प्रणालींमध्ये स्टेटर व्होल्टेज वेक्टरचे घटक; - स्टेटर आणि रोटर विंडिंग्सचा सक्रिय प्रतिकार; - स्टेटर आणि रोटर विंडिंग्सचे एकूण इंडक्टन्स (17), (18); - स्टेटर आणि रोटरचे इलेक्ट्रोमॅग्नेटिक कपलिंग गुणांक (12), (13); p - ध्रुव जोड्यांची संख्या; - रोटरची यांत्रिक गती; J हा मोटर रोटरच्या जडत्वाचा क्षण आहे; - मोटर शाफ्टवरील प्रतिकाराचा क्षण.
विंडिंग्सच्या एकूण इंडक्टन्सची मूल्ये आणि स्टेटर आणि रोटरच्या इलेक्ट्रोमॅग्नेटिक कपलिंग गुणांकांची सूत्रे वापरून गणना केली जाते:
कुठे: - गळती इंडक्टन्स; - चुंबकीकरण सर्किटचे प्रेरण,
कुठे: - स्टेटर आणि रोटर विंडिंग्सचा प्रेरक गळती प्रतिरोध; - चुंबकीकरण सर्किटची प्रेरक प्रतिक्रिया; f ही स्टेटरला पुरवलेल्या व्होल्टेजची वारंवारता आहे.
निर्देशांक (11) मध्ये भिन्न समीकरणांची प्रणाली सोडवून, गतिमान यांत्रिक वैशिष्ट्य आणि राज्य चलांची वेळ वैशिष्ट्ये (उदाहरणार्थ, टॉर्क आणि वेग) मिळवणे शक्य आहे, जे इंजिनमध्ये होणाऱ्या प्रक्रियेची कल्पना देते. . मोटरच्या स्टेटर विंडिंगला पुरवलेल्या व्होल्टेजचे घटक सूत्रानुसार मोजले जातात:
![]() (19)
(19)
जेथे U हे स्टेटरला पुरवलेल्या व्होल्टेजचे प्रभावी मूल्य आहे.
सिस्टीमच्या प्रत्येक विभेदक समीकरणाच्या डाव्या आणि उजव्या बाजू एकत्रित करण्यासाठी समीकरणे सोडवणे खाली येते:
 (20)
(20)
समीकरणे वापरून वर्तमान अवलंबनांची गणना केली जाते:
 (21)
(21)
AD DMT f 011-6у1 चा पासपोर्ट डेटा लेखात दिला आहे.
आकृती 4 रोटर फ्लक्स लिंकेजच्या बाजूने असलेल्या समन्वय प्रणालीमध्ये स्टेटर करंटद्वारे नियंत्रित IM चे मॉडेल दाखवते.

तांदूळ. 4. सिमुलिंक वातावरणात IM वेक्टर नियंत्रण मॉडेल:
एडी - असिंक्रोनस मोटर;
УУ - कंट्रोल डिव्हाइस, यासह: आरके - समन्वय डीकपलिंग युनिट, आर - रोटेटर;
एन हा भार आहे, जो बीयरिंगचा प्रतिकार देखील विचारात घेतो.
IM वेक्टर कंट्रोल मॉडेल आपल्याला त्याच्या ऑपरेशन दरम्यान असिंक्रोनस मोटरमध्ये होणाऱ्या इलेक्ट्रोमॅग्नेटिक प्रक्रियांचे निरीक्षण करण्यास अनुमती देते.
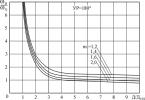
खालील आलेख (आकृती 5) पूर्ण-प्रयोगात प्राप्त झालेल्या नियंत्रकाशिवाय इलेक्ट्रिक मोटरच्या यांत्रिक वैशिष्ट्यांच्या तुलनेत मॉडेलिंगद्वारे प्राप्त व्हेक्टर नियंत्रणासह इलेक्ट्रिक मोटरची यांत्रिक वैशिष्ट्ये दर्शवितो.

तांदूळ. 5. यांत्रिक वैशिष्ट्यांची तुलना.
जसे आपण आलेखावरून पाहू शकता, वेक्टर नियंत्रणासह एसिंक्रोनस मोटरचे यांत्रिक वैशिष्ट्य कठोर होते, परिणामी ओव्हरलोड श्रेणी विस्तृत होते. 0 ते 153 Nm च्या श्रेणीतील वैशिष्ट्यपूर्ण मूल्ये थोडी वेगळी आहेत, त्रुटी फक्त 1.11% आहे, म्हणून, परिणामी गणितीय मॉडेल वास्तविक इंजिनच्या ऑपरेशनला पुरेसे प्रतिबिंबित करते आणि अभियांत्रिकी सराव मध्ये प्रयोग आयोजित करण्यासाठी वापरले जाऊ शकते.
निष्कर्ष
वेक्टर कंट्रोलचा वापर आपल्याला पुरवठा व्होल्टेजचे मोठेपणा आणि टप्पा बदलून इलेक्ट्रिक मोटरच्या इलेक्ट्रोमॅग्नेटिक टॉर्कवर थेट नियंत्रण ठेवण्याची परवानगी देतो. असिंक्रोनस मोटर वेक्टर नियंत्रित करण्यासाठी, आपण प्रथम ते एका सरलीकृत द्वि-ध्रुव मशीनमध्ये कमी केले पाहिजे, ज्यामध्ये स्टेटर आणि रोटरवर दोन विंडिंग आहेत, त्यानुसार स्टेटर, रोटर आणि फील्डशी संबंधित समन्वय प्रणाली आहेत. वेक्टर कंट्रोल म्हणजे कंट्रोल लिंकमध्ये समायोज्य इलेक्ट्रिक मोटरच्या गणितीय मॉडेलची उपस्थिती.
वर्णन केलेल्या मॉडेलच्या ऑपरेशनमधून प्राप्त केलेली यांत्रिक वैशिष्ट्ये वेक्टर नियंत्रणाबद्दल सैद्धांतिक माहितीची पुष्टी करतात. मॉडेल पुरेसे आहे आणि पुढील प्रयोगांसाठी वापरले जाऊ शकते.
पुनरावलोकनकर्ते:
श्वेत्सोव्ह व्लादिमीर अलेक्सेविच, डॉक्टर ऑफ टेक्निकल सायन्सेस, आरईएस कामचॅटजीटीयू विभागाचे प्राध्यापक, पेट्रोपाव्लोव्स्क-कामचत्स्की.
पोटापोव्ह वादिम वदिमोविच, डॉक्टर ऑफ टेक्निकल सायन्सेस, सुदूर पूर्व फेडरल युनिव्हर्सिटी शाखेचे प्राध्यापक, पेट्रोपाव्लोव्स्क-कामचत्स्की.
ग्रंथसूची लिंक
लिखोदेडोव्ह ए.डी., पोर्टन्यागिन एन.एन. एसिंक्रोनस इलेक्ट्रिक ड्राइव्हचे वेक्टर कंट्रोलचे मॉडेलिंग // विज्ञान आणि शिक्षणाच्या आधुनिक समस्या. - 2013. - क्रमांक 1.;URL: http://science-education.ru/ru/article/view?id=8213 (प्रवेश तारीख: 02/01/2020). "अकॅडमी ऑफ नॅचरल सायन्सेस" या प्रकाशन गृहाने प्रकाशित केलेली मासिके आम्ही तुमच्या लक्षात आणून देत आहोत.
स्थिर आणि डायनॅमिक (क्षणिक) मोडमध्ये इलेक्ट्रिक ड्राईव्हचे उच्च दर्जाचे नियंत्रण मिळविण्यासाठी, मोटर टॉर्कला त्वरीत थेट नियंत्रित करण्याची क्षमता असणे आवश्यक आहे.
प्रत्येक कालावधीतील कोणत्याही मोटरचा टॉर्क हे दोन टॉर्क निर्माण करणाऱ्या घटकांच्या परिमाण (मोठेपणा) आणि टप्प्याद्वारे निर्धारित केले जाते: वर्तमान आणि चुंबकीय प्रवाह. IM मध्ये, स्टेटर आणि रोटरचे प्रवाह आणि फ्लक्स लिंकेज एकाच वेगाने फिरतात, भिन्न, वेळ-विविध फेज पॅरामीटर्स असतात आणि ते थेट मापन आणि नियंत्रणाच्या अधीन नसतात. IM मध्ये उपलब्ध नियंत्रित व्हेरिएबल स्टेटर करंट आहे, ज्यामध्ये चुंबकीय प्रवाह आणि टॉर्क तयार करणारे घटक असतात. या दोन घटकांचे फेज ओरिएंटेशन केवळ बाह्य नियंत्रण उपकरणाद्वारे प्राप्त केले जाऊ शकते, ज्यामुळे "वेक्टर नियंत्रण" या शब्दाचा उदय होतो.
इलेक्ट्रिक ड्राइव्हच्या संरचनेत, मोटरला आदर्श मोटरच्या स्वरूपात इलेक्ट्रोमेकॅनिकल ईएमएफ कन्व्हर्टर मानले जाते. त्याच्या रोटरमध्ये वस्तुमान आणि यांत्रिक ऊर्जा नसते, यांत्रिक ऊर्जा नुकसान नसते आणि वास्तविक भौतिक रोटरशी कठोरपणे जोडलेले असते, जे इलेक्ट्रिक मोटरच्या यांत्रिक भागाशी संबंधित असते. अशा मोटरला इलेक्ट्रोमेकॅनिकल मल्टी-टर्मिनल नेटवर्कद्वारे दर्शविले जाऊ शकते ज्यामध्ये n विंडिंग्सच्या संख्येनुसार इलेक्ट्रिकल लीड्सच्या n जोड्या असतात आणि एक जोडी यांत्रिक लीड्स असतात (आकृती 2 पहा). यांत्रिक टर्मिनल्सवर वेगाने उर्जेचे इलेक्ट्रोमेकॅनिकल रूपांतरण (EMT) परिणामी wइलेक्ट्रोमॅग्नेटिक टॉर्क एम विकसित होतो टॉर्क एम हे ईएमएफचे आउटपुट मूल्य आणि इलेक्ट्रिक ड्राइव्हच्या यांत्रिक भागासाठी इनपुट मूल्य आहे. गती wयांत्रिक भागाच्या हालचालींच्या अटींद्वारे निर्धारित केले जाते, परंतु ईएमएफसाठी ते स्वतंत्र व्हेरिएबल म्हणून मानले जाऊ शकते. यांत्रिक चल एमआणि w EMF ला यांत्रिक भागासह एकाच आंतरकनेक्ट सिस्टममध्ये कनेक्ट करा. इंजिनमधील सर्व प्रक्रियांचे वर्णन विद्युत समतोल समीकरणांच्या प्रणालीद्वारे केले जाते (समीकरणांची संख्या विंडिंगच्या संख्येइतकी असते) आणि इलेक्ट्रोमेकॅनिकल ऊर्जा रूपांतरणाचे समीकरण. हे करण्यासाठी, इलेक्ट्रिक पॉवर ट्रान्समिशनच्या सिद्धांतामध्ये, सामान्यीकृत इलेक्ट्रिकल मशीनचे दोन-टप्प्याचे मॉडेल वापरले जाते (आकृती 1 पहा), ज्यामध्ये पूर्णपणे सर्व प्रकारचे आणि इलेक्ट्रिकल मशीनचे प्रकार कमी केले जातात:
आकृती 1 - सामान्यीकृत EMF चे मॉडेल.
α, β - स्थिर स्टेटर अक्ष; d, q- रोटरचे फिरणारे अक्ष; φ - रोटर रोटेशन कोन; - रोटरचा कोनीय वेग;
विद्युत संतुलन समीकरण i- windings:
आकृती 2 - वेक्टर कंट्रोल सर्किट
वेक्टर कंट्रोल सर्किटमध्ये तीन मुख्य कार्यात्मक भाग असतात:
बीआरपी- व्हेरिएबल रेग्युलेटरचे ब्लॉक;
BVP- व्हेरिएबल गणना ब्लॉक;
BZP- व्हेरिएबल्स सेट करण्यासाठी ब्लॉक;
प्रवेशद्वारावर बीआरपीगती आणि प्रवाह आदेश सिग्नल प्राप्त होतात, तसेच अभिप्राय सिग्नल (आउटपुटमधून BVP) – स्टेटर करंट, रोटर फ्लक्स लिंकेज आणि स्पीडच्या घटकांची फील्ड-ओरिएंटेड मूल्ये. बीआरपीफ्लक्स, टॉर्क आणि वर्तमान नियामकांचा संच असतो, ज्याच्या आउटपुटवर स्टेटर करंटचे घटक सेट करण्यासाठी फील्ड-ओरिएंटेड सिग्नल देखील व्युत्पन्न केले जातात.
BZPपरिभाषेतील फेज आणि समन्वय परिवर्तने पार पाडते d – qथ्री-फेज कंट्रोल सिग्नल सिस्टममधील व्हेरिएबल्स PWM AIN. ब्लॉक करा BVPमोठेपणा आणि फेज पॅरामीटर्सच्या वर्तमान मूल्यांची गणना करते d – q IM व्हेरिएबल्स, संबंधित सेन्सर्सच्या आउटपुटमधून येणाऱ्या वास्तविक थ्री-फेज आयएम करंट आणि व्होल्टेज सिग्नलचे फेज आणि समन्वयित परिवर्तने पार पाडतात.
ब्लॉकद्वारे केलेल्या परिवर्तनांचे समन्वय करा BVP, अक्षांसह IM स्टेटरच्या थ्री-फेज सिस्टीमच्या वास्तविक निर्देशांकांमधून संक्रमणाचा समावेश होतो d,q(परिवर्तन 3 → 2). ब्लॉक करा BZPपासून व्यस्त समन्वय परिवर्तन (2 → 3) पार पाडते d— qला a, b, c.
या ब्लॉक्समधील फेज ट्रान्सफॉर्मेशन्स दोन कोऑर्डिनेट सिस्टीममध्ये व्हेरिएबल्सच्या फेज पॅरामीटर्सचे बंधन प्रदान करतात.
ED वैशिष्ट्यांची विश्वासार्हता, किंमत आणि गुणवत्ता मोजलेल्या पॅरामीटर्सची संख्या आणि मापन अचूकतेमुळे प्रभावित होते. रक्तदाबाच्या वेक्टर नियंत्रणासाठी, मोजण्यासाठी उपलब्ध असलेल्या चार चलांपैकी किमान दोन मोजणे आवश्यक आहे:
- आयएम स्टेटर प्रवाह;
- आयएम टर्मिनल्सवर व्होल्टेज;
- IM रोटरची कोनीय गती;
- IM रोटरची कोनीय स्थिती;
व्हेक्टर कंट्रोल तुम्हाला जवळजवळ कोणत्याही वेळी, स्टेटरच्या सापेक्ष रोटरच्या कोणत्याही स्थितीवर, मशीनवरील कोणत्याही टोकदार वेगाने आणि लोडवर जास्तीत जास्त cos φ IM प्राप्त करण्यास अनुमती देते. हे, यामधून, कार्यक्षमता आणि टॉर्क लक्षणीय वाढवते. मशीन, जे, या प्रकरणात, व्यावहारिकरित्या इंजिनच्या कोनीय वेगावर अवलंबून नाही.
इलेक्ट्रिक ड्राइव्हच्या स्थिर गतीचा कोणताही बदल किंवा देखभाल इंजिनद्वारे विकसित टॉर्कचे लक्ष्यित नियमन प्रदान करते. मोटरच्या एका भागाने तयार केलेल्या प्रवाहाच्या (फ्लक्स लिंकेज) परस्परसंवादाच्या परिणामी टॉर्क तयार होतो आणि तो या दोन अवकाशीय टॉर्क-जनरेटिंग वेक्टरच्या वेक्टर उत्पादनाद्वारे निर्धारित केला जातो. म्हणून, इंजिनद्वारे विकसित टॉर्कची परिमाण प्रत्येक वेक्टरच्या मॉड्यूल्स आणि त्यांच्या दरम्यानच्या अवकाशीय कोनाद्वारे निर्धारित केले जाते.
बांधताना स्केलर नियंत्रण प्रणालीटॉर्क निर्माण करणाऱ्या वेक्टर्सची केवळ संख्यात्मक मूल्ये (मॉड्यूल) नियंत्रित आणि नियंत्रित केली गेली, परंतु त्यांची अवकाशीय स्थिती नियंत्रित केली गेली नाही. वेक्टर नियंत्रण तत्त्वनियंत्रण प्रणाली टॉर्क जनरेट करणाऱ्या वेक्टरच्या एकमेकांशी संबंधित अंतराळातील संख्यात्मक मूल्य आणि स्थान नियंत्रित करते या वस्तुस्थितीत आहे. म्हणूनच, वेक्टर नियंत्रणाचे कार्य म्हणजे मोटर विंडिंग्समध्ये तात्काळ वर्तमान मूल्ये निश्चित करणे आणि सक्तीने स्थापित करणे अशा प्रकारे की प्रवाह आणि फ्लक्स लिंकेजचे सामान्यीकृत वेक्टर स्पेसमध्ये एक स्थान व्यापतात ज्यामुळे आवश्यक इलेक्ट्रोमॅग्नेटिक टॉर्कची निर्मिती सुनिश्चित होते.
मोटरद्वारे व्युत्पन्न केलेले इलेक्ट्रोमॅग्नेटिक टॉर्क:
जेथे m डिझाइन घटक आहे; , 2 - अवकाशीय
प्रवाहांचे वेक्टर किंवा फ्लक्स लिंकेज जे टॉर्क तयार करतात; X-क्षण निर्माण करणाऱ्या वेक्टरमधील अवकाशीय कोन.
(6.53) पासून खालीलप्रमाणे, टॉर्क तयार करणाऱ्या प्रवाहांची (फ्लक्स लिंकेज) किमान मूल्ये आवश्यक टॉर्क मूल्यासाठी असतील जर वेक्टर एक्सआणि 2 एकमेकांना लंब आहेत, उदा. X = °.
वेक्टर कंट्रोल सिस्टीममध्ये, व्हेक्टरची निरपेक्ष अवकाशीय स्थिती आणि स्टेटर किंवा रोटर अक्षांच्या संबंधात 2 निश्चित करण्याची आवश्यकता नाही. एका वेक्टरची स्थिती दुसऱ्या वेक्टरच्या तुलनेत निश्चित करणे आवश्यक आहे. म्हणून, व्हेक्टरपैकी एक असे मानले जाते पाया,आणि दुसऱ्याची स्थिती कोन नियंत्रित करते एक्स.
याच्या आधारे, वेक्टर कंट्रोल सिस्टीम तयार करताना, बेस व्हेक्टर (कोऑर्डिनेट्स आणि- v). असे गणितीय वर्णन § 1.6 मध्ये दिले आहे.
जर आपण बेस वेक्टर घेतला आणि समन्वय अक्ष निर्देशित केला आणिया वेक्टरसह, नंतर, (1.46) वर आधारित, आम्हाला खालील समीकरणांची प्रणाली मिळते:

या समीकरणांमध्ये? v = , कारण वेक्टर समन्वय अक्षाशी एकरूप होतो आणि.
अंजीर मध्ये. आकृती 6.31 अक्षांमधील प्रवाह आणि प्रवाह जोडणीचे वेक्टर आकृती दर्शविते आणि- v ^ समन्वय अभिमुखता आणिरोटर कपलिंग वेक्टर बाजूने. वेक्टर आकृतीवरून ते खालीलप्रमाणे आहे

तांदूळ. B.31. अक्षांमधील फ्लक्स लिंकेज आणि प्रवाहांचे वेक्टर आकृती u-vयेथे एम
स्थिर (किंवा हळू बदल) सह p रोटर क्लच d"V u /dt=परिणामी i आणि =आणि Г = yji u +i v = i v
या प्रकरणात, रोटर चालू वेक्टर जीरोटर फ्लक्स लिंकेजला लंब. रोटर लीकेज फ्लक्स 0 मशीन गॅपमधील फ्लक्सपेक्षा लक्षणीयरीत्या कमी असल्याने एच, टीमग, जर रोटर फ्लक्स लिंकेज स्थिर असेल, तर आपण असे गृहीत धरू शकतो की स्टेटर करंट व्हेक्टरचे समन्वय अक्षावर प्रक्षेपण v मी विसमान |/"| किंवा /
दत्तक समन्वय प्रणालीचा फायदा u-vएसिंक्रोनस मोटरच्या टॉर्क आणि वेगाच्या वेक्टर नियंत्रणाची प्रणाली तयार करण्यासाठी मोटर टॉर्क (6.54) दोन परस्पर लंब वेक्टरचे स्केलर उत्पादन म्हणून परिभाषित केले जाते: रोटर फ्लक्स लिंकेज *P आणि स्टेटर करंटचा सक्रिय घटक. टॉर्कची ही व्याख्या वैशिष्ट्यपूर्ण आहे, उदाहरणार्थ, डीसी मोटर्सच्या स्वतंत्र उत्तेजनासाठी, स्वयंचलित नियंत्रण प्रणाली तयार करण्यासाठी सर्वात सोयीस्कर.
वेक्टर नियंत्रण प्रणाली.अशा व्यवस्थापनाची संरचनात्मक आकृती खालील तत्त्वांवर आधारित आहे:
- ? दोन-चॅनेल कंट्रोल सिस्टममध्ये रोटर फ्लक्स लिंकेज स्टॅबिलायझेशन चॅनेल आणि स्पीड (टॉर्क) कंट्रोल चॅनेल असते;
- ? दोन्ही चॅनेल स्वतंत्र असणे आवश्यक आहे, म्हणजे एका चॅनेलची नियमन केलेली मूल्ये बदलल्याने दुसऱ्यावर परिणाम होऊ नये;
- ? वेग (टॉर्क) कंट्रोल चॅनेल स्टेटर करंट घटक /v नियंत्रित करते. टॉर्क कंट्रोल लूपचे ऑपरेटिंग अल्गोरिदम डीसी मोटर्सच्या स्लेव्ह स्पीड कंट्रोल सिस्टम प्रमाणेच आहे (§ 5.6 पहा) - स्पीड कंट्रोलरचा आउटपुट सिग्नल मोटर टॉर्कचा संदर्भ आहे. रोटर फ्लक्स लिंकेज मॉड्यूलद्वारे या कार्याचे मूल्य विभाजित करून आणिआम्हाला स्टेटर करंट घटकासाठी कार्य मिळते i v (अंजीर 6.32);
- ? प्रत्येक चॅनेलमध्ये /v आणि प्रवाहांचे अंतर्गत सर्किट असते मी आणिसध्याच्या नियामकांसह जे नियमनची आवश्यक गुणवत्ता प्रदान करतात;
- ? वर्तमान मूल्ये प्राप्त केली i v आणि मी आणिसमन्वय परिवर्तनाद्वारे मूल्यांमध्ये रूपांतरित केले जातात मी अआणि / p द्वि-चरण निश्चित समन्वय प्रणालीचे a - (3 आणि नंतर थ्री-फेज कोऑर्डिनेट सिस्टीममधील स्टेटर विंडिंगमधील वास्तविक प्रवाहांच्या कार्यात a-b-c;
- ? गणना आणि अभिप्राय निर्मितीसाठी आवश्यक असलेल्या स्टेटर विंडिंग्जमधील वेग, रोटर रोटेशन अँगल आणि प्रवाहांचे सिग्नल योग्य सेन्सर्सद्वारे मोजले जातात आणि नंतर, व्यस्त समन्वय परिवर्तनांचा वापर करून, समन्वय अक्षांशी संबंधित या प्रमाणांच्या मूल्यांमध्ये रूपांतरित केले जातात. u-v

तांदूळ.
अशी नियंत्रण प्रणाली टॉर्कचे उच्च-गती नियंत्रण प्रदान करते, आणि परिणामी, शक्य तितक्या विस्तृत श्रेणीमध्ये (10,000:1 पेक्षा जास्त) वेग. या प्रकरणात, एसिंक्रोनस मोटरची तात्काळ टॉर्क मूल्ये महत्त्वपूर्ण टॉर्कच्या नाममात्र मूल्यापेक्षा लक्षणीयरीत्या ओलांडू शकतात.
नियंत्रण चॅनेल एकमेकांपासून स्वतंत्र करण्यासाठी, प्रत्येक चॅनेलच्या इनपुटवर क्रॉस कॉम्पेन्सटिंग सिग्नल e K0MPU आणि e compm सादर करणे आवश्यक आहे (चित्र 6.32 पहा). आम्हाला स्टेटर सर्किट समीकरणे (6.54) वरून या सिग्नलचे मूल्य सापडते. संबंधित प्रवाह आणि इंडक्टन्स (1.4) द्वारे व्यक्त आणि CHK 1y आणि अक्ष ओरिएंटेड आहे हे लक्षात घेऊन आणिरोटर फ्लक्स लिंकेज वेक्टरच्या बाजूने Х / |у =0 आम्हाला मिळते:
आम्ही ते कोठून शोधू?

कुठे अपव्यय गुणांक.
(6.55) (6.54) मध्ये बदलणे आणि विचाराधीन नियंत्रण प्रणालीमध्ये हे लक्षात घेऊन d x V 2u /dt = 0, आम्हाला मिळते

किंवा 
नवीन वेळ स्थिरांक; e आणि e v -अक्षांसह रोटेशनचे EMF u-v
स्वतंत्र प्रमाण निश्चित करणे मी आणिआणि /v ची भरपाई करणे आवश्यक आहे e आणिआणि e vभरपाई देणाऱ्या व्होल्टेजचा परिचय:

वेक्टर नियंत्रणाची तत्त्वे अंमलात आणण्यासाठी, रोटर फ्लक्स लिंकेज वेक्टरचे मॉड्यूल आणि कोनीय स्थिती गणितीय मॉडेल (अंदाज) वापरून थेट मोजणे किंवा गणना करणे आवश्यक आहे. हॉल सेन्सर्सचा वापर करून मशीनच्या हवेच्या अंतरामध्ये प्रवाहाचे थेट मापन करून असिंक्रोनस मोटरच्या वेक्टर नियंत्रणाचे कार्यात्मक आकृती अंजीर मध्ये दर्शविले आहे. ६.३३.

तांदूळ. B.ZZ.एसिंक्रोनस मोटरच्या थेट वेक्टर नियंत्रणाचे कार्यात्मक आकृती
सर्किटमध्ये दोन नियंत्रण चॅनेल आहेत: रोटर फ्लक्स लिंकेज *पी 2 आणि स्पीड कंट्रोल चॅनेलसाठी एक नियंत्रण (स्थिरीकरण) चॅनेल. पहिल्या चॅनेलमध्ये बाह्य रोटर फ्लक्स लिंकेज लूप आहे ज्यामध्ये PI फ्लक्स लिंकेज कंट्रोलर RP आणि फ्लक्स लिंकेज फीडबॅक आहे, ज्याचा सिग्नल मशीन गॅपमधील प्रवाह मोजणारे हॉल सेन्सर्स वापरून व्युत्पन्न केला जातो. एक्स? टअक्षांच्या बाजूने ai(3. वास्तविक प्रवाह मूल्ये नंतर PP ब्लॉकमध्ये अक्ष a आणि p च्या बाजूने रोटर फ्लक्स लिंकेजच्या मूल्यांमध्ये मोजली जातात आणि वेक्टर फिल्टर VF वापरून, रोटर फ्लक्स लिंकेजचे मॉड्यूलस वेक्टर आढळतो, जो फ्लक्स लिंकेज रेग्युलेटर RP ला नकारात्मक फीडबॅक सिग्नल म्हणून पुरवला जातो आणि स्पीड कंट्रोल चॅनेलमध्ये डिव्हायडर म्हणून वापरला जातो.
पहिल्या चॅनेलमध्ये, अंतर्गत प्रवाह सर्किट फ्लक्स लिंकेज सर्किटच्या अधीन आहे मी आणि,फेज कन्व्हर्टर PF2 आणि कोऑर्डिनेट कन्व्हर्टर KP1 वापरून स्टेटर फेज करंट्सच्या वास्तविक मूल्यांवरून मोजले जाणारे पीआय वर्तमान रेग्युलेटर PT1 आणि वर्तमान / 1i च्या वास्तविक मूल्यावरील अभिप्राय असलेले. वर्तमान नियामक पीटी 1 चे आउटपुट व्होल्टेज सेटिंग आहे उलू,ज्यामध्ये दुसऱ्या चॅनेलचा भरपाई सिग्नल जोडला जातो e kshpi(6.57). प्राप्त व्होल्टेज सेटिंग सिग्नल निर्देशांक KP2 आणि फेज PF2 कन्व्हर्टर्सद्वारे वारंवारता कनवर्टरच्या आउटपुटवर निर्दिष्ट मूल्यांमध्ये आणि व्होल्टेज टप्प्यांमध्ये रूपांतरित केले जाते.
रोटर फ्लक्स लिंकेज कंट्रोल चॅनल हे सुनिश्चित करते की फ्लक्स लिंकेज Ch* 2 निर्दिष्ट मूल्य x P 2set च्या स्तरावर सर्व ड्राइव्ह ऑपरेटिंग मोडमध्ये स्थिर राहते. फील्ड कमकुवत करणे आवश्यक असल्यास, H*^ काही मर्यादेत कमी दराने बदलू शकतो.
दुसरे चॅनेल इंजिनचा वेग (टॉर्क) नियंत्रित करण्यासाठी डिझाइन केलेले आहे. यात बाह्य गती लूप आणि गौण अंतर्गत चालू लूप / 1у समाविष्ट आहे. स्पीड कमांड तीव्रता जनरेटरकडून येते, जे प्रवेग आणि आवश्यक गती मूल्य निर्धारित करते. स्पीड फीडबॅक डीएस स्पीड सेन्सर किंवा रोटर अँगुलर पोझिशन सेन्सरद्वारे लागू केला जातो.
इलेक्ट्रिक ड्राईव्हच्या आवश्यकतेनुसार पीसी स्पीड कंट्रोलर आनुपातिक किंवा आनुपातिक-अविभाज्य म्हणून स्वीकारला जातो. स्पीड कंट्रोलरचे आउटपुट हे L/R इंजिनद्वारे विकसित टॉर्कसाठी कमांड आहे. रोटर फ्लक्स लिंकेज H/2 द्वारे टॉर्क विद्युत् प्रवाहाच्या उत्पादनाच्या समान असल्याने, नंतर DB डिव्हिजन ब्लॉकमध्ये टॉर्क सेटिंग मूल्य विभाजित करून एम परत Ch/2 वर, आम्ही वर्तमान सेटिंगचे मूल्य प्राप्त करतो, जे वर्तमान नियामक PT2 च्या इनपुटला दिले जाते. पुढील सिग्नल प्रक्रिया पहिल्या चॅनेलसारखीच आहे. परिणामी, आम्हाला टप्प्यानुसार मोटर पुरवठा व्होल्टेजसाठी एक कार्य प्राप्त होते, जे सामान्यीकृत स्टेटर व्होल्टेज वेक्टरच्या प्रत्येक क्षणी मूल्य आणि अवकाशीय स्थिती निर्धारित करते!? लक्षात घ्या की - कोऑर्डिनेट्समधील व्हेरिएबल्सशी संबंधित सिग्नल हे डायरेक्ट करंट सिग्नल आहेत आणि एअर कॉर्डिनेट्समधील प्रवाह आणि व्होल्टेज परावर्तित करणारे सिग्नल हे पर्यायी वर्तमान सिग्नल आहेत जे केवळ मॉड्यूलच नव्हे तर संबंधित व्होल्टेज आणि करंटची वारंवारता आणि टप्पा निर्धारित करतात.
विचारात घेतलेली वेक्टर नियंत्रण प्रणाली सध्या मायक्रोप्रोसेसरच्या आधारे डिजिटल स्वरूपात कार्यान्वित केली आहे. विविध स्ट्रक्चरल वेक्टर कंट्रोल स्कीम विकसित केल्या गेल्या आहेत आणि त्या मोठ्या प्रमाणावर वापरल्या जातात, विचाराधीन एकापेक्षा तपशीलात भिन्न आहेत. अशा प्रकारे, सध्या, फ्लक्स लिंकेजची वास्तविक मूल्ये चुंबकीय प्रवाह सेन्सरद्वारे मोजली जात नाहीत, परंतु मोजलेल्या फेज करंट्स आणि व्होल्टेजच्या आधारे मोटरच्या गणितीय मॉडेलद्वारे मोजली जातात.
सर्वसाधारणपणे, वेक्टर नियंत्रण हे एसी मोटर्स नियंत्रित करण्याचा सर्वात प्रभावी मार्ग म्हणून मूल्यांकन केले जाऊ शकते, उच्च अचूकता आणि नियंत्रणाची गती प्रदान करते.
दिमित्री लेव्हकिन
मुख्य कल्पना वेक्टर नियंत्रणहे केवळ पुरवठा व्होल्टेजची परिमाण आणि वारंवारताच नव्हे तर टप्पा देखील नियंत्रित करते. दुसऱ्या शब्दांत, अवकाशीय वेक्टरचे परिमाण आणि कोन नियंत्रित केले जातात. वेक्टर नियंत्रणाच्या तुलनेत उच्च कार्यक्षमता आहे. वेक्टर नियंत्रण स्केलर नियंत्रणाचे जवळजवळ सर्व तोटे काढून टाकते.
- वेक्टर नियंत्रणाचे फायदे:
- वेग नियंत्रणाची उच्च अचूकता;
- संपूर्ण वारंवारता श्रेणीवर इंजिनची गुळगुळीत प्रारंभ आणि गुळगुळीत रोटेशन;
- लोड बदलांना त्वरित प्रतिसाद: जेव्हा भार बदलतो, तेव्हा वेगात व्यावहारिकदृष्ट्या कोणताही बदल होत नाही;
- वाढलेली नियंत्रण श्रेणी आणि नियंत्रण अचूकता;
- गरम आणि चुंबकीकरणामुळे होणारे नुकसान कमी होते आणि .
- वेक्टर नियंत्रणाच्या तोट्यांमध्ये हे समाविष्ट आहे:
- पॅरामीटर्स सेट करण्याची आवश्यकता;
- सतत लोडवर मोठ्या वेगातील चढउतार;
- उच्च संगणकीय जटिलता.
वेक्टर नियंत्रणाचे सामान्य कार्यात्मक आकृती
उच्च कार्यक्षमता AC स्पीड कंट्रोल सिस्टीमचा सामान्य ब्लॉक आकृती वरील आकृतीमध्ये दर्शविला आहे. सर्किटचा आधार म्हणजे चुंबकीय फ्लक्स लिंकेज आणि टॉर्क कंट्रोल सर्किट्स एकत्रितपणे मूल्यांकन युनिटसह, ज्याची अंमलबजावणी विविध प्रकारे केली जाऊ शकते. या प्रकरणात, बाह्य स्पीड कंट्रोल लूप मोठ्या प्रमाणात एकत्रित आहे आणि टॉर्क कंट्रोलर्स M * आणि चुंबकीय फ्लक्स लिंकेज Ψ * (फ्लो कंट्रोल युनिटद्वारे) साठी नियंत्रण सिग्नल व्युत्पन्न करते. मोटारचा वेग (गती/स्थिती) सेन्सरद्वारे मोजला जाऊ शकतो किंवा अंमलबजावणीची परवानगी देणाऱ्या अंदाजकाद्वारे मिळवता येतो.
वेक्टर नियंत्रण पद्धतींचे वर्गीकरण
विसाव्या शतकाच्या सत्तरच्या दशकापासून, टॉर्क नियंत्रणाच्या अनेक पद्धती प्रस्तावित केल्या गेल्या आहेत. ते सर्व उद्योगात मोठ्या प्रमाणावर वापरले जात नाहीत. म्हणून, हा लेख केवळ सर्वात लोकप्रिय व्यवस्थापन पद्धतींबद्दल चर्चा करतो. सायनसॉइडल बॅक EMF सह नियंत्रण प्रणालींसाठी चर्चा केलेल्या टॉर्क नियंत्रण पद्धती सादर केल्या आहेत.
विद्यमान टॉर्क नियंत्रण पद्धती विविध प्रकारे वर्गीकृत केल्या जाऊ शकतात.
- बऱ्याचदा, टॉर्क नियंत्रण पद्धती खालील गटांमध्ये विभागल्या जातात:
- रेखीय (पीआय, पीआयडी) नियामक;
- नॉनलाइनर (हिस्टेरेसिस) नियामक.
| नियंत्रण पद्धत | गती नियंत्रण श्रेणी | गती त्रुटी 3,% | टॉर्क वाढण्याची वेळ, ms | टॉर्क सुरू होत आहे | किंमत | वर्णन | ||
|---|---|---|---|---|---|---|---|---|
| 1:10 1 | 5-10 | उपलब्ध नाही | लहान | खूप खाली | यात लोड बदलांना मंद प्रतिसाद आणि एक लहान वेग नियंत्रण श्रेणी आहे, परंतु अंमलबजावणी करणे सोपे आहे. | |||
| >1:200 2 | 0 | उच्च | उच्च | आपल्याला मुख्य इंजिन पॅरामीटर्स - टॉर्क आणि वेग सहजतेने आणि द्रुतपणे नियंत्रित करण्यास अनुमती देते. ही पद्धत कार्य करण्यासाठी, रोटरच्या स्थितीबद्दल माहिती आवश्यक आहे. | ||||
| >1:200 2 | 0 | उच्च | उच्च | फायदे एकत्र करण्यासाठी डिझाइन केलेली एक संकरित पद्धत... | ||||
| >1:200 2 | 0 | उच्च | उच्च | यात उच्च गतिशीलता आणि एक साधे सर्किट आहे, परंतु त्याच्या ऑपरेशनचे वैशिष्ट्यपूर्ण वैशिष्ट्य म्हणजे उच्च प्रवाह आणि टॉर्क रिपल्स. | ||||
| >1:200 2 | 0 | उच्च | उच्च | यात इन्व्हर्टर स्विचिंग वारंवारता इतर पद्धतींपेक्षा कमी आहे आणि उच्च-शक्तीच्या इलेक्ट्रिक मोटर्स नियंत्रित करताना तोटा कमी करण्यासाठी डिझाइन केलेले आहे. | ||||
टीप:
- कोणताही अभिप्राय नाही.
- अभिप्राय सह.
- स्थिर स्थितीत
वेक्टर कंट्रोलमध्ये, (FOC - फील्ड ओरिएंटेड कंट्रोल) आणि (DTC - डायरेक्ट टॉर्क कंट्रोल) सर्वात मोठ्या प्रमाणावर वापरले जातात.
रेखीय टॉर्क नियामक
लीनियर टॉर्क कंट्रोलर्स व्होल्टेजच्या पल्स रुंदी मॉड्युलेशन (PWM) च्या संयोगाने कार्य करतात. रेग्युलेटर सॅम्पलिंग कालावधीत सरासरी आवश्यक स्टेटर व्होल्टेज वेक्टर निर्धारित करतात. व्होल्टेज वेक्टर शेवटी PWM पद्धतीद्वारे संश्लेषित केले जाते, बहुतेक प्रकरणांमध्ये, स्पेस वेक्टर मॉड्युलेशन (SVM) वापरले जाते. नॉनलाइनर टॉर्क कंट्रोल सर्किट्सच्या विपरीत, जेथे तात्काळ मूल्ये वापरून सिग्नलवर प्रक्रिया केली जाते, रेखीय टॉर्क कंट्रोल सर्किट्समध्ये, एक रेखीय नियंत्रक (PI) नमुना कालावधीत सरासरी मूल्यांसह कार्य करतो. त्यामुळे, नॉनलाइनर टॉर्क कंट्रोलर सर्किट्समध्ये सॅम्पलिंग फ्रिक्वेन्सी 40 kHz वरून 2-5 kHz पर्यंत रेखीय टॉर्क कंट्रोलर सर्किट्समध्ये कमी केली जाऊ शकते.
(POA, इंग्रजी फील्ड ओरिएंटेड कंट्रोल, FOC) ही एक नियंत्रण पद्धत आहे जी ब्रशलेस अल्टरनेटिंग करंट (,) स्वतंत्र उत्तेजनासह डायरेक्ट करंट मशीन प्रमाणे नियंत्रित करते, हे सूचित करते की फील्ड आणि स्वतंत्रपणे नियंत्रित केले जाऊ शकते.
Blaschke आणि Hasse द्वारे 1970 मध्ये प्रस्तावित फील्ड-ओरिएंटेड नियंत्रण, यांत्रिकरित्या स्विच केलेल्या नियंत्रणाच्या समानतेवर आधारित आहे. या मोटरमध्ये, फील्ड आणि आर्मेचर विंडिंग वेगळे केले जातात, फ्लक्स लिंकेज फील्ड करंटद्वारे नियंत्रित केले जाते आणि टॉर्क स्वतंत्रपणे वर्तमान नियमांद्वारे नियंत्रित केले जाते. अशा प्रकारे, फ्लक्स लिंकेज आणि टॉर्क प्रवाह विद्युत आणि चुंबकीयरित्या विभक्त केले जातात.

सेन्सरलेस फील्ड-ओरिएंटेड कंट्रोलचे सामान्य कार्यात्मक आकृती 1
दुसरीकडे, ब्रशलेस एसी मोटर्स ( , ) मध्ये बहुधा थ्री-फेज स्टेटर विंडिंग असते आणि स्टेटर करंट वेक्टर I s चा वापर फ्लक्स आणि टॉर्क दोन्ही नियंत्रित करण्यासाठी केला जातो. अशा प्रकारे, फील्ड करंट आणि आर्मेचर करंट विलीन केलेस्टेटर वर्तमान सदिश मध्ये आणि स्वतंत्रपणे नियंत्रित केले जाऊ शकत नाही. डिस्कनेक्शन गणितीयरित्या साध्य केले जाऊ शकते - स्टेटर करंट व्हेक्टर I s चे तात्काळ मूल्य दोन घटकांमध्ये विघटित करून: स्टेटर करंट I sd चा रेखांशाचा घटक (फील्ड तयार करणे) आणि स्टेटर करंट I sq चा ट्रान्सव्हर्स घटक (टॉर्क तयार करणे) रोटर फील्ड (R -FOC – रोटर फ्लक्स-ओरिएंटेड कंट्रोल) बाजूने केंद्रित फिरणाऱ्या dq समन्वय प्रणालीमध्ये - वरील चित्र. अशाप्रकारे, ब्रशलेस एसी मोटरचे नियंत्रण नियंत्रणासारखेच बनते आणि रेखीय पीआय रेग्युलेटर आणि स्पेस व्हेक्टर व्होल्टेज मॉड्युलेशनसह PWM इन्व्हर्टर वापरून साध्य करता येते.
फील्ड-ओरिएंटेड कंट्रोलमध्ये, टॉर्क आणि फील्ड स्टेटर वर्तमान वेक्टर घटक नियंत्रित करून अप्रत्यक्षपणे नियंत्रित केले जातात.
स्टेटर प्रवाहांची तात्काळ मूल्ये पार्क ट्रान्सफॉर्मेशन αβ/dq वापरून dq रोटेटिंग कोऑर्डिनेट सिस्टीममध्ये रूपांतरित केली जातात, ज्यासाठी रोटरच्या स्थितीबद्दल देखील माहिती आवश्यक असते. फील्ड रेखांशाचा प्रवाह घटक I sd द्वारे नियंत्रित केला जातो, तर टॉर्क ट्रान्सव्हर्स करंट घटक I sq द्वारे नियंत्रित केला जातो. इनव्हर्स पार्क ट्रान्सफॉर्म (dq/αβ), एक गणितीय समन्वय ट्रान्सफॉर्मेशन मॉड्यूल, एखाद्याला व्होल्टेज व्हेक्टर V sα * आणि V sβ * च्या संदर्भ घटकांची गणना करण्यास अनुमती देते.

रोटरची स्थिती निश्चित करण्यासाठी, एकतर इलेक्ट्रिक मोटरमध्ये स्थापित केलेला रोटर पोझिशन सेन्सर किंवा कंट्रोल सिस्टममध्ये लागू केलेला सेन्सरलेस कंट्रोल अल्गोरिदम वापरला जातो, जो कंट्रोल सिस्टममध्ये उपलब्ध डेटाच्या आधारे रिअल टाइममध्ये रोटरच्या स्थितीबद्दल माहितीची गणना करतो.
स्टेटर फील्डच्या बाजूने असलेल्या आयताकृती समन्वय प्रणालीमध्ये कार्यरत फीडबॅकसह टॉर्क आणि फ्लक्स लिंकेज समायोजनसह स्पेस-वेक्टर मॉड्युलेशनसह डायरेक्ट टॉर्क कंट्रोलचा ब्लॉक डायग्राम खालील आकृतीमध्ये दर्शविला आहे. PI टॉर्क आणि फ्लक्स लिंकेज कंट्रोलर्सचे आउटपुट स्टेटर फील्ड (इंग्लिश स्टेटर फ्लक्स-ओरिएंटेड कंट्रोल, S-FOC) च्या बाजूने असलेल्या dq समन्वय प्रणालीमध्ये स्टेटर व्होल्टेज V ψ * आणि V M * चे संदर्भ घटक म्हणून अर्थ लावले जातात. या आज्ञा (स्थिर व्होल्टेज) नंतर एका निश्चित समन्वय प्रणाली αβ मध्ये रूपांतरित केल्या जातात, त्यानंतर नियंत्रण मूल्ये V sα * आणि V sβ * स्पेस वेक्टर मॉड्यूलेशन मॉड्यूलला पाठविली जातात.

स्पेस वेक्टर व्होल्टेज मॉड्युलेशनसह थेट टॉर्क नियंत्रणाचे कार्यात्मक आकृती
कृपया लक्षात घ्या की हे सर्किट वर्तमान नियंत्रण लूपशिवाय एक सरलीकृत स्टेटर फील्ड-ओरिएंटेड कंट्रोल (एस-एफओसी) किंवा क्लासिक सर्किट (पीयूएम-टीव्ही, इंग्रजी स्विचिंग टेबल डीटीसी, एसटी डीटीसी) म्हणून मानले जाऊ शकते ज्यामध्ये स्विचिंग टेबल आहे. मॉड्युलेटर (SVM) ने बदलले आहे, आणि हिस्टेरेसिस टॉर्क आणि फ्लक्स कंट्रोलर रेखीय PI कंट्रोलर्सने बदलले आहेत.
स्पेस वेक्टर मॉड्युलेशन (DTC-FCM) सह डायरेक्ट टॉर्क कंट्रोलमध्ये, टॉर्क आणि फ्लक्स लिंकेज थेट बंद लूपमध्ये नियंत्रित केले जातात, त्यामुळे मोटर फ्लक्स आणि टॉर्कचा अचूक अंदाज घेणे आवश्यक आहे. क्लासिक हिस्टेरेसिस अल्गोरिदमच्या विपरीत, ते सतत स्विचिंग वारंवारतेवर कार्य करते. हे नियंत्रण प्रणालीच्या कार्यप्रदर्शनात लक्षणीय सुधारणा करते: यामुळे टॉर्क आणि प्रवाहाचे स्पंदन कमी होते, ज्यामुळे आपण आत्मविश्वासाने इंजिन सुरू करू शकता आणि कमी वेगाने कार्य करू शकता. परंतु त्याच वेळी, ड्राइव्हची डायनॅमिक वैशिष्ट्ये कमी केली जातात.
थेट स्वराज्य
डिपेनब्रॉकने ऑक्टोबर 1984 मध्ये थेट स्व-शासन पद्धतीसाठी पेटंट अर्ज दाखल केला होता. थेट स्व-शासनाचा ब्लॉक आकृती खाली दर्शविला आहे.
स्टेटर फ्लक्स लिंकेज कमांड ψs * आणि सध्याच्या टप्प्यातील घटक ψ sA , ψ sB आणि ψ sC च्या आधारे, फ्लक्स लिंकेज कंपॅरेटर डिजिटल सिग्नल d A, d B आणि d C तयार करतात, जे सक्रिय व्होल्टेज स्थितींशी संबंधित असतात (V1 - V 6). हिस्टेरेटिक टॉर्क कंट्रोलरमध्ये आउटपुट सिग्नल d M असतो, जो शून्य स्थिती निर्धारित करतो. अशाप्रकारे, स्टेटर फ्लक्स लिंकेज रेग्युलेटर सक्रिय व्होल्टेज स्टेटसचा वेळ मध्यांतर सेट करतो जे स्टेटर फ्लक्स लिंकेज वेक्टरला दिलेल्या मार्गावर हलवतात आणि टॉर्क रेग्युलेटर शून्य व्होल्टेज स्टेटसचा वेळ मध्यांतर निर्धारित करतो जे इलेक्ट्रिक मोटरचा टॉर्क सहनशीलतेमध्ये राखतात. हिस्टेरेसिसद्वारे निर्धारित फील्ड.

थेट स्वराज्य योजना
- थेट स्व-शासन योजनेची वैशिष्ट्यपूर्ण वैशिष्ट्ये आहेत:
- फ्लक्स लिंकेज आणि स्टेटर करंटचे गैर-साइनसॉइडल प्रकार;
- स्टेटर फ्लक्स लिंकेज वेक्टर षटकोनी मार्गावर फिरतो;
- कोणतेही पुरवठा व्होल्टेज राखीव नाही, इन्व्हर्टरची क्षमता पूर्णपणे वापरली जाते;
- इनव्हर्टर स्विचिंग वारंवारता स्विचिंग टेबलसह थेट टॉर्क नियंत्रणापेक्षा कमी आहे;
- स्थिर आणि कमकुवत क्षेत्र श्रेणींमध्ये उत्कृष्ट गतिशीलता.
लक्षात घ्या की थेट स्व-नियंत्रण पद्धतीचे कार्यप्रदर्शन 14% च्या फ्लक्स हिस्टेरेसिस रूंदीसह सर्किट वापरून पुनरुत्पादित केले जाऊ शकते.