बऱ्याच कार मालकांना अद्याप एनक्रिप्टेड ड्राइव्ह प्रकार म्हणजे काय हे समजत नाही, जे आश्चर्यकारक नाही कारण ही इंग्रजी संक्षेप आहेत. म्हणून, लगेच परिस्थिती स्पष्ट करूया: RWD – रीअर व्हील ड्राइव्ह – मागील ड्राइव्ह; FWD - फ्रंट व्हील ड्राइव्ह - फ्रंट-व्हील ड्राइव्ह; 4WD - 4 व्हील ड्राइव्ह - 4-व्हील ड्राइव्ह ("4x4"); AWD – सर्व (काही स्त्रोतांमध्ये स्वयंचलित) व्हील ड्राइव्ह – स्वयंचलित ऑल-व्हील ड्राइव्ह. अशा प्रकारे, उपांत्य आणि शेवटची पोझिशन्स ऑल-व्हील ड्राइव्हद्वारे दर्शविली जातात, परंतु त्यांच्या स्वतःच्या वैयक्तिक वैशिष्ट्यांसह.
अनुभव दर्शवितो: ट्रॅफिक सुरक्षेचा स्तर येतो तेव्हा इंधनाचा वापर किंवा कारचे वजन यासारख्या निकषांद्वारे तुम्हाला मार्गदर्शन केले जाऊ नये. जरी सर्वात छान जीप देखील नियंत्रण गमावण्यापासून मुक्त नसली तरी, उपकरणे खरेदी करताना, आपल्याला त्याची आवश्यकता का आहे ते निश्चित करा आणि आपल्या भविष्यातील ड्रायव्हिंग शैलीसह आपल्या क्षमता संतुलित करा.
जर, तांत्रिक वैशिष्ट्यांचा अभ्यास केल्यानंतर, तुम्हाला अजूनही शंका असेल, तर तज्ञांचा सल्ला घेण्यास अजिबात संकोच करू नका आणि फक्त बाबतीत, त्यांना AWD ड्राइव्हबद्दल तपशीलवार विचारा: हा कोणत्या प्रकारचा ट्रान्समिशन पर्याय आहे?
वाहन चालविण्याचे प्रकार
चला प्रत्येक प्रकारच्या ड्राइव्हवर बारकाईने नजर टाकूया आणि त्याचे फायदे आणि तोटे देखील विश्लेषण करूया.
R.W.D.
अशा ड्राइव्हचा वापर खालील फायदे तयार करतो:
- लहान त्रिज्यामुळे सोपे वळणे. हे समोरच्या चाके एका जटिल ड्राईव्ह एक्सल सिस्टमपर्यंत मर्यादित नाहीत या वस्तुस्थितीमुळे प्राप्त झाले आहे.
- अगदी मागच्या बाबतीतही स्वतंत्र निलंबनकारला सतत वेगाचे सांधे बसवण्याची गरज नाही.
- स्टीयरिंग व्हील त्याच्या दिशेने वळवून आणि वेग समायोजित करून त्वरीत स्थानिकीकरण करता येणारी नियंत्रित स्किड.
- प्रतिक्रियाशील टॉर्क्सच्या अनुपस्थितीमुळे लाइटवेट स्टीयरिंग.
- चांगली प्रवेग गतीशीलता आणि आत्मविश्वासपूर्ण चढाई.
- बेपर्वा ड्रायव्हर्स आणि वेगवान आणि उग्र चाहत्यांकडून मूल्यवान.
- इष्टतम वजन शिल्लक.
वाहन चालवताना, RWD सह वाहनाचे वजन मागील चाकांवर हस्तांतरित केले जाते, परिणामी कारला चांगले कर्षण मिळते आणि प्रवेग गतिशीलता सुधारली जाते.
अरेरे, फायद्यांबरोबरच तोटेही आहेत. त्यापैकी कमी आहेत, परंतु ते असमानतेने अधिक लक्षणीय आहेत:
- समस्याग्रस्त रस्त्यावर अपुरी नियंत्रणक्षमता. बर्फ आणि ओलसर जमिनीवर हे विशेषतः जाणवते. नियंत्रण ऑप्टिमाइझ करण्यासाठी, अधिक प्रगत स्थिरीकरण आणि ट्रॅक्शन कंट्रोल सिस्टमची स्थापना आवश्यक असेल. महाग प्रोफाइल रबर ही समस्या अंशतः सुधारू शकते.
- RWD वाहनांची किंमत त्यांच्या फ्रंट-व्हील ड्राइव्ह समकक्षांपेक्षा कित्येक पटीने जास्त असते. हा विरोधाभास ट्रान्समिशनच्या क्लिष्ट डिझाइन आणि महागड्या चेसिस भागांमुळे आहे. खरेदी निवडताना ही मुख्य परिस्थिती विचारात घेणे आवश्यक आहे.
- स्किड करण्याची प्रवृत्ती. वळताना, पुढच्या चाकांमुळे वाढीव प्रतिकार होतो, ज्याचा मागील ड्राइव्ह सामना करू शकत नाही; परिणामी स्लिपेज होते, ज्यामुळे स्किड होते.
- इंधन बर्नआउट. RWD कुटुंबाचा एक दुर्मिळ प्रतिनिधी अभिमान बाळगू शकतो की ते महामार्गावर देखील 100 किमी प्रति 10 लिटरपेक्षा कमी "खातो".
- ड्राइव्ह सर्किट खूप अवजड आहे आणि कर्षण आणि शक्तीचे काही नुकसान निर्माण करते.
ठराविक प्रतिनिधी: BMW 3-Series E30, कॅडिलॅक सीटीएस, शेवरलेट एसएस आणि कॅमारो, डॉज चॅलेंजर, चार्जर आणि मॅग्नम, क्रिसलर 300, फोर्ड मुस्टँग आणि सिएरा, ह्युंदाई जेनेसिस, Jaguar S-Type, Lexus GS, Mazda MX-5, Mercedes E-Class W124, Nissan 370Z, ओपल ओमेगा, Scion FR-S, Smart Fortwo, Subaru BRZ, VAZ-2106.
F.W.D.
फ्रंट-व्हील ड्राइव्ह सुरुवातीला वळणाच्या प्रतिकाराद्वारे दर्शविली जाते: वळताना, चाके, त्यांच्या स्वत: च्या कर्षणामुळे, त्यांच्या मूळ स्थितीकडे परत येण्याची प्रवृत्ती असते. ही मालमत्ता कार सुरक्षिततेचे लक्षण आणि सरासरी ड्रायव्हरसाठी अनुकूल स्थिती मानली जाते.

FWD असलेल्या वाहनाचे वजन मागील-चाक ड्राइव्ह डिझाइन असलेल्या वाहनापेक्षा 3-5% कमी असते
जागतिक ऑटोमोटिव्ह उद्योगात या प्रकारच्या ड्राइव्हसह मशीन सर्वात सामान्य आहे. आता काही काळापासून, याने सर्वात किफायतशीर आणि तुलनेने स्वस्त प्रवासी वाहनांचे स्थान व्यापले आहे. त्याची गणना केली जाते: त्याची किंमत, वजन आणि "भूक" मागील-चाक ड्राइव्हपेक्षा खूपच कमी आहे. कन्व्हेयर बेल्टवर "इंजिन + फ्रंट-व्हील ड्राइव्ह" असेंब्ली एकत्र करणे आणि ते फक्त हुडच्या खाली घालणे सोपे आहे, तर मागील एक्सलला कारच्या मजल्यामध्ये तांत्रिक बोगदा आणि बरेच काही आवश्यक आहे. म्हणून, मध्यम आकाराच्या कार (विशेषत: मिनी-जीप आणि एसयूव्ही) फक्त फ्रंट-व्हील ड्राइव्हसह सुसज्ज आहेत. हा पर्याय त्यांच्यासाठी आदर्श आहे जे लोकसंख्या असलेल्या भागात फिरण्यास प्राधान्य देतात, कधीकधी त्यांना सोडून जातात. तथापि, शहराबाहेरही, ड्रायव्हिंग सहसा समतल जमिनीवर चालते. रस्ता पृष्ठभागकिरकोळ नुकसान सह. फ्रंट-व्हील ड्राइव्ह वाहने अशा सोप्या मिशनला जास्त अडचणीशिवाय सामोरे जातात.
- कॉम्पॅक्टनेस.
- तुलनेने उच्च क्रॉस-कंट्री क्षमता.
- सर्वोत्तम सुकाणू कार्यक्षमता.
- अपुरी कुशलता.
- अचानक सुरू करताना समोरची चाके वारंवार घसरणे.
- इंजिनचे कठोर माउंटिंग, परिणामी - लक्षणीय कंपन.
- पॉवर मर्यादा (200 hp पेक्षा जास्त पॉवर युनिट चेसिस नष्ट करते आणि हाताळणी बिघडवते).
हे महत्वाचे आहे! FWD या संक्षेपात पूर्ण किंवा चार म्हणून “F” चे स्पष्टीकरण चुकीचे आहे, पूर्णपणे चुकीचे आहे आणि वर्गीकरण गोंधळात टाकते.
प्रतिनिधी: Audi A4, AZLK-2141, Chevrolet Impala, LuAZ-969В, VAZ-2108, मित्सुबिशी लान्सर, VW गोल्फ.
4WD
कायमस्वरूपी ऑल-व्हील ड्राइव्हमध्ये मोटरसह मल्टी-स्टेज ट्रान्समिशन सिस्टमद्वारे सर्व चाकांचे स्थिर कनेक्शन समाविष्ट असते. केंद्र भिन्नता यासाठी वापरली जाते. अशा प्रकारे, VAZ-2121 त्याच्या सक्तीने लॉकिंगसह सुसज्ज आहे, जे निवाला कारच्या बरोबरीने ठेवते. सर्व भूभागकनेक्ट केलेल्या ऑल-व्हील ड्राइव्हसह.
"4x4" फॉरमॅटसह, तुम्ही चाकांमधील रोटेशनचे वितरण समायोजित करू शकता - काही मॉडेल्समध्ये समोरच्या एक्सलवर टॉर्क बंद करण्याची क्षमता असते (UAZ, मित्सुबिशी पाजेरो). तथापि, हे लक्षात घेणे आवश्यक आहे की अलीकडे उत्पादकांनी ऑन/ऑफ फंक्शनसह ऑल-व्हील ड्राइव्हची निर्मिती अत्यंत क्वचितच केली आहे, कारण हा पर्याय अप्रभावी आणि महाग असल्याचे सिद्ध झाले आहे.

4WD ड्राइव्ह असलेल्या अनेक कार आहेत स्वतंत्र निवडचार चाकांमध्ये वीज वितरण
मला असे म्हणायलाच हवे हस्तांतरण प्रकरणहळूहळू दुर्मिळ होत आहे. सायबरनेटिक्सद्वारे यांत्रिकी बदलल्या जात आहेत, जे स्वायत्तपणे रॅम्पच्या फिरण्याच्या प्रक्रियेवर लक्ष ठेवतात आणि ट्रान्समिशनचा इष्टतम ऑपरेटिंग मोड राखतात. ते जसे असो, पारंपारिक योजना, जेव्हा ड्रायव्हर इच्छेनुसार, कमी ट्रॅक्शन गियर ठेवू शकतो तेव्हा नाही उच्च गतीआणि क्रँकशाफ्टचा वेग वाढला, तरीही ते होतात. मध्ये ही खूप चांगली मदत आहे गंभीर परिस्थिती, उदाहरणार्थ, जर वाहन बर्फात अडकले असेल किंवा नांगरणी करत असेल.
जेव्हा, आवश्यक असल्यास, 2H चालू करणे शक्य असते तेव्हा ते सोयीचे असते - एका एक्सलवर ट्रान्समिशन, क्लासिक रीअर-व्हील ड्राइव्ह म्हणून कार्य करते. हे पुरेसे नसल्यास, 4H वर स्विच करा आणि अडथळ्यांवर सहजतेने मात करा. तथापि, इतर ड्राइव्हस् पासून 4WD वेगळे करणारे मुख्य वैशिष्ट्य म्हणजे एक विशेष तांत्रिक मोड - 4L (लो गियर). त्यासह, 4 चाके पूर्णपणे लॉक केली जातात आणि त्याच वारंवारतेवर फिरतात. शहरासाठी, उल्लेख केलेला मोड निरुपयोगी आहे, परंतु खोल स्नोड्रिफ्ट किंवा दलदलीसाठी - अगदी बरोबर! शुद्ध इंजिन पॉवर, दोन्ही एक्सलला समान भागांमध्ये पुरवले जाते, ते न घसरता चिकट आणि सैल वस्तुमान बाहेर काढेल.
प्रतिनिधी: Audi Q3-SQ7, Bentley Bentayga, BMW X1-X6, चेरी टिग्गो, Daewoo Winstorm, Dodge Journey, Fiat Fullback, Jaguar F-Pace, Jeep Wrangler, टोयोटा जमीनक्रूझर, लँड रोव्हर.
AWD
या माहितीचा उपयोग प्रामुख्याने क्रॉसओव्हरमध्ये झाला आहे. त्याचे तत्त्व असे आहे की ड्राईव्ह शाफ्ट फ्रंट एक्सल फिरवते आणि जेव्हा पुरेसे कर्षण नसते तेव्हाच इलेक्ट्रॉनिक्स मागील एक्सल सुरू करण्याची आज्ञा देते. कर्षण वितरण अंदाजे 60% समोर आणि 40% मागील आहे. परंतु अपवाद आहेत: ऑडी आणि सुबारू वर प्रयत्न अर्ध्या भागात विभागले गेले आहेत.
4WD च्या तुलनेत AWD कमी टॉर्क निर्माण करते. याव्यतिरिक्त, AWD मध्ये चालू करण्याची क्षमता नाही कमी गियरटॉर्क (येथे कोणतेही गुणक-विभाजक नाही).

आधुनिक क्रॉसओव्हरमध्ये स्वयंचलित ऑल-व्हील ड्राइव्ह बहुतेकदा वापरली जाते
तथापि, जर आपण AWD आणि 4WD बद्दल बोलत असाल, तर आपल्याला समजते की सर्व 4 रॅम्पमध्ये यांत्रिक रोटेशनल एनर्जी नाममात्र वितरीत केली जाते. प्रामाणिकपणे, हे लक्षात घेण्यासारखे आहे: जगाच्या काही भागांमध्ये हे दोन पदनाम सामान्यतः एकसारखे असतात. AWD कारच्या मध्यभागी असलेल्या विशेष ऑपरेटिंग युनिटसह सुसज्ज आहे या वस्तुस्थितीकडे ते दुर्लक्ष करतात. तो स्वत:च्या विवेकबुद्धीनुसार दोन्ही पुलांना शक्ती वितरीत करतो, म्हणजे त्याला योग्य वाटेल. अशी कार्यात्मक निवडकता प्रवेग प्रक्रियेस अनुकूल करते आणि किफायतशीर ड्रायव्हिंग शैलीसाठी प्रयत्न करते, परंतु बर्फ किंवा चिखलावर वाहन चालवताना, अनैच्छिक ड्रिफ्ट्स दिसून येतात. सर्वसाधारणपणे, तुम्हाला AWD च्या ऑपरेशनची सवय लावली पाहिजे, तुम्हाला ते अनुभवणे आणि क्रियाकलापांच्या टप्प्यांचा अंदाज घेणे शिकणे आवश्यक आहे, परंतु यासाठी वेळ आणि संयम लागतो.
हिवाळ्यात गाडी चालवताना AWD ट्रान्समिशन सुरक्षित असते असे म्हणता येणार नाही. या संदर्भात, तज्ञ चेतावणी देतात: ऑल-व्हील ड्राइव्ह, मोठ्या प्रमाणात, ब्रेकिंगमध्ये किंवा बर्फाच्छादित, बर्फाळ वळणांवर कोणतेही फायदे नाहीत. हे केवळ काही क्षणांमध्ये स्थिरता राखण्यासाठी मदत करते आणि सुरक्षिततेचा भ्रम निर्माण करते.
समजा तुम्ही शांतपणे ओल्या, निसरड्या पृष्ठभागावर गाडी चालवत आहात. अर्थात, अशा रस्त्याच्या परिस्थितीत कारला फ्रंट-व्हील ड्राइव्ह असते. पण नंतर कार समस्याप्रधान वळणात प्रवेश करते. या क्षणी, ट्रान्समिशन परिस्थितीतील बदलावर प्रतिक्रिया देते आणि कार अनावधानाने स्किडमध्ये जाते. या बदल्यात, या परिस्थितीत ड्रायव्हरला देखील या अचानक "आश्चर्य" वर प्रतिक्रिया देण्यासाठी वेळ असणे आवश्यक आहे, अन्यथा अपघात टाळता येणार नाही.
प्रतिनिधी: Volvo S60, VW गोल्फ III-IV, सुबारू इम्प्रेझा.
4WD आणि AWD मधील फरक
सर्वसाधारणपणे बोलायचे झाल्यास, AWD स्वयंचलितपणे सक्रिय झालेल्या ऑल-व्हील ड्राइव्हसाठी प्रदान करते, तर 4WD मध्ये ते एकतर कायमस्वरूपी असते किंवा स्वतः कनेक्ट आणि अक्षम केले जाऊ शकते. तसे, ऑटो विषयांमध्ये, अद्याप पूर्णपणे स्थापित न केलेल्या शब्दावलीचे कधीकधी उल्लंघन केले जाते, जे ग्राहकांना आणखी गोंधळात टाकते. उदाहरणार्थ, फोर्ड टेम्पो आणि सुबारू जस्टी एके काळी AWD ने सुसज्ज असलेल्या कार म्हणून बाजारात "प्रमोशन" केले गेले होते, जरी प्रत्यक्षात ड्राइव्ह एक्सलचे कार्य मॅन्युअली समायोजित केले गेले. परंतु जागतिक व्यवहारात "डिमांड फोर व्हील ड्राइव्ह" सारखी संकल्पना देखील आहे, म्हणजे 4-व्हील ड्राइव्ह जी आवश्यक असल्यास कनेक्ट केली जाऊ शकते. या प्रणालीवर कोण नियंत्रण ठेवते - एक व्यक्ती किंवा रोबोटिक्स हे स्पष्ट नाही. एक ना एक प्रकारे, या “विनाइग्रेट” चे दोषी मुख्यतः बेजबाबदार माध्यम आहेत, जे स्वयं पुनरावलोकने, किंमत सूची आणि प्रेस प्रकाशन प्रकाशित करताना चुका करतात, तसेच इंटरनेट कॉपीरायटर, जे विशिष्टतेच्या शोधात स्वेच्छेने किंवा अनिच्छेने माहितीचे विकृतीकरण करतात.

अर्धवेळ 4WD प्रथम दिसला आणि ऑल-व्हील ड्राइव्हचा सर्वात सोपा आणि विश्वासार्ह प्रकार आहे
पूर्वी, कार मोठ्या प्रमाणात सिंगल-व्हील ड्राइव्ह होत्या, ज्यामध्ये मागील (कमी वेळा समोर) ड्राईव्ह जोडी होती. नंतर ट्रान्सफर केस ("ट्रान्सफर केस") सह नमुने तयार केले गेले. त्याद्वारे, डिझायनर्सने स्थापित केलेल्या प्रमाणात धुरा दरम्यान जोर वितरीत केला गेला. अशा प्रकारे प्रथम सर्व-भूप्रदेश वाहने दिसू लागली. नंतर, ऑल-व्हील ड्राइव्ह ट्रान्समिशनच्या अनेक आवृत्त्यांचा शोध लावला गेला:
- अर्धवेळ 4WD - आंशिक ऑल-व्हील ड्राइव्ह. या प्रकारच्या प्रणालीचा केवळ अल्पकालीन वापर करण्यास परवानगी आहे, कारण कोरड्या, कठीण रस्त्यांवर पोशाख आणि बिघाड वाढतो.
- पूर्ण-वेळ 4WD - एकूण नॉन-स्विच करण्यायोग्य ड्राइव्ह. टॉर्क सतत ॲक्सल्समध्ये स्थिर मूल्य असलेल्या गुणोत्तरामध्ये वितरीत केला जातो. या ड्राइव्ह मोडमध्ये, कार अनियंत्रित भूप्रदेशावर फिरते, परंतु खरोखर ऑफ-रोड गुण प्राप्त करण्यासाठी ती मध्यभागी कडक लॉकिंग आणि क्रॉस-एक्सल भिन्नतेसह सुसज्ज आहे.
- AWD – ऑल-व्हील ड्राइव्ह स्वयंचलित मोडमध्ये कार्यरत आहे. संगणक किंवा व्हिस्कोस क्लच स्वतंत्रपणे चाक घसरण्याचा क्षण निश्चित करतो, याव्यतिरिक्त दुसरा एक्सल जोडतो.
जे वेगवेगळ्या परिस्थितीत चांगले असते
AWD किंवा 4WD, FWD किंवा RWD? कोणत्या प्रकारची ट्रान्समिशन सिस्टम खरेदी करावी याबद्दल बरेच लोक गोंधळलेले आहेत या वस्तुस्थितीमुळे, आज कोणत्या प्रकारची ड्राइव्ह सर्वात संबंधित आहे याबद्दल वाहनचालकांमध्ये वादविवाद चालू आहे. विश्लेषकांनीही या प्रकरणावर अनेक प्रती तोडल्या... चला या समस्येकडे लक्ष देऊ या.
एखादे उत्पादन निवडताना प्रथमतः खरेदीदाराच्या आर्थिक संभाव्यतेसह किंमतीशी संबंधित घटक असतो. दुसरे म्हणजे त्याची चव प्राधान्ये. तिसरे - निवासस्थान आणि जीवनशैलीची वैशिष्ट्ये.

जर आपण वारंवार ऑफ-रोड ड्रायव्हिंगबद्दल बोलत असाल, तर शहरात 4WD ड्राइव्हसह कार निवडण्याची शिफारस केली जाते, FWD पुरेसे आहे;
दक्षिणेकडील लोकांसाठी, 4WD आणि AWD, तत्त्वतः, संबंधित नाहीत, विशेषत: ते अधिक महाग आहेत आणि जास्त इंधन वापरतात. त्यांना फक्त एक फ्रंट-व्हील ड्राइव्ह किंवा उच्च-गुणवत्तेचे हिवाळ्यातील टायर असलेले मागील-चाक ड्राइव्ह वाहन खरेदी करण्याची आवश्यकता आहे. कोणत्याही परिस्थितीत, ते तर्कसंगत, व्यवसायासारखे असेल.
मध्यम हिवाळ्यासह मध्यम झोनमध्ये, FWD सर्वोत्तम अनुकूल आहे. थंड हंगामात त्याचा फायदा असा आहे की कारचा सर्वात मोठा वस्तुमान (गिअरबॉक्स, इंजिन, निलंबन) समोरच्या एक्सलवर केंद्रित आहे. याबद्दल धन्यवाद, मागील-चाक ड्राइव्हच्या विपरीत, चालविलेल्या फ्रंट रॅम्पमध्ये इष्टतम कर्षण असते.
| घटक | |||
| कारची किंमत | सरासरी | किमान | उच्च |
| कोरड्या रस्त्यावर हाताळणी | उत्कृष्ट | उत्कृष्ट | उत्कृष्ट |
| निसरड्या रस्त्यांवर हाताळणी | समाधानकारक | चांगले | उत्कृष्ट |
| क्रॉस-कंट्री क्षमता (बर्फ/चिखल) | समाधानकारक | समाधानकारक | उत्कृष्ट |
| डायनॅमिक्स | चांगले | समाधानकारक | उत्कृष्ट |
| डिझाइनची जटिलता/एकूण वजन | सरासरी | किमान | उच्च |
| ब्रेकिंग कार्यक्षमता | उत्कृष्ट | समाधानकारक | उत्कृष्ट |
| चातुर्य | उत्कृष्ट | समाधानकारक | समाधानकारक |
| इंधनाचा वापर | सरासरी | किमान | उच्च |
डोंगराळ, वालुकामय प्रदेश, दलदल आणि स्नोड्रिफ्टसाठी, 4WD निश्चितपणे आवश्यक आहे. AWD देखील ऑफ-रोड भूभाग हाताळण्यासाठी डिझाइन केलेले आहे, परंतु अधिक खडबडीत पद्धतीने. हे उंच उतारांवर आणि अगम्य चिखलात योग्य नाही - ते टिकून राहणार नाही. याव्यतिरिक्त, AWD ने सुसज्ज असलेल्या कारमध्ये 4WD मानल्या जाणाऱ्या पूर्ण-चाक ड्राइव्हपेक्षा किंचित कमी ग्राउंड क्लीयरन्स आहे. म्हणून, तुम्ही AWD सह नशिबाला भुरळ घालू नका आणि खडकाळ वाटेने किंवा जंगलातील खड्डे आणि खड्ड्यांमधून गाडी चालवू नका.
AWD ही 21 व्या शतकातील प्रगत, स्मार्ट प्रणाली आहे. मध्यम लहरी, कारण ते सुधारण्याच्या टप्प्यात आहे. तथापि, शहरी चक्रासाठी, तसेच स्कॅन्डिनेव्हियन प्रकाराच्या सौम्य हिवाळ्यासाठी, हा एक निःसंदिग्ध उपाय आहे. याव्यतिरिक्त, 4WD च्या तुलनेत AWD लक्षणीयरीत्या कमी इंधन वापरते.
RWD साठी, वर्तमान तज्ञ जवळजवळ सर्व पैलूंमध्ये त्याची अव्यवहार्यता आणि गैरसोय लक्षात घेतात.

तथाकथित "क्लासिक" व्हीएझेड कारवर रीअर-व्हील ड्राइव्ह प्रदान केली गेली
मुळात, लोकसंख्या कामावर आणि घरी जाण्यासाठी वाहनाची मालक बनते. या उद्देशासाठी सर्वात संतुलित पर्याय म्हणजे फ्रंट-व्हील ड्राइव्ह छोटी कार. वस्तुस्थिती अशी आहे की फ्रंट-व्हील ड्राइव्ह जड ऑल-व्हील ड्राइव्ह आवृत्तीच्या तुलनेत इंधनाची लक्षणीय बचत करते.
सध्या, हळूहळू RWD सोडण्याची प्रवृत्ती आहे, जे आश्चर्यकारक नाही, कारण गेल्या शतकातील ही प्रवृत्ती आहे. आजपर्यंत, हे प्रामुख्याने रेस कार आणि शक्तिशाली सेडानवर राहिले आहे. आणि नंतरच्या बाबतीत, ही परंपरा आणि नवीन फॅशनला श्रद्धांजली आहे, आणि गरज नाही, कारण केवळ मागील-चाक ड्राइव्हसह पूर्ण वाढ शक्य आहे. रीअर-व्हील ड्राइव्ह सुपर-एसयूव्ही (विशेषतः, 4 रनर आणि टाहो) देखील मॉडेलची क्षमता वाढवण्यासाठी नियमाला अपवाद आहेत. इतर रीअर-व्हील ड्राईव्ह वाहने (जसे की पिकअप ट्रक) मालवाहतुकीच्या उद्देशाने तयार केली जातात. आणि बहुतेक सर्व-भूप्रदेश वाहने जास्तीत जास्त शक्ती आणि टॉर्कसाठी 4x4 ड्राइव्हसह सुसज्ज आहेत. AWD, एका विशिष्ट अर्थाने, येथे सार्वत्रिक विकास म्हणून कार्य करते.
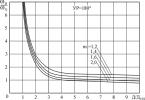
कायमस्वरूपी ऑल-व्हील ड्राइव्ह. केंद्र भिन्नता सममितीय बेव्हल आहे (पुढील आणि मागील चाकांमधील टॉर्क वितरण 50/50 आहे), मल्टी-प्लेट हायड्रोमेकॅनिकल क्लचद्वारे लॉक केलेले आहे.A241H हा साध्या हायड्रॉलिक नियंत्रणासह एक गिअरबॉक्स आहे आणि त्यातील लॉकिंग नियंत्रण अगदी आदिम आहे (), तर अधिक प्रगत A540H मध्ये संपूर्ण इलेक्ट्रॉनिक नियंत्रण आहे अभिप्राय ().
जास्तीत जास्त ब्लॉकिंग गुणांक "L" आणि "R" श्रेणींमध्ये नियंत्रण प्रणालीद्वारे लक्षात येतो.
 |
 |
दररोज ड्रायव्हिंगसाठी रेट केलेले अचूक आहे ऑटो मोड, कार टोइंग करताना किंवा सुटे टायर वापरतानाच ते बंद केले जाऊ शकते ( सूचनांमधून उतारा).
| मॉडेल | सोडा | संसर्ग | विभेदक कुलूप |
| कॅल्डिना 190 | 1992-2002 | 4AT A540H+AF2BE | |
| कॅरिना 190 | 1992-1996 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| कॅरिना 210 | 1996-08.1998 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| कॅरिना ED 200 | 1993-1998 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| कोरोला / स्प्रिंटर 90 | 1987-1992 | 4AT A241H | |
| कोरोला / स्प्रिंटर 100 | 1992-2002 | 4AT A241H | इंटरएक्सल - हायड्रोमेकॅनिकल कपलिंग |
| कोरोला / स्प्रिंटर 110 | 1995-2000 | 4AT A241H | इंटरएक्सल - हायड्रोमेकॅनिकल कपलिंग |
| कोरोला स्पेसिओ 110 | 1997-2002 | 4AT A241H | इंटरएक्सल - हायड्रोमेकॅनिकल कपलिंग |
| कोरोना 190 | 1992-1996 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| कोरोना 210 | 1996-12.1997 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| कोरोना एक्सिव 200 | 1993-1998 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| इप्सम १० | 1996-04.1998 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| RAV4 10 | 1994-2000 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच, मागील - टॉर्सन (पर्यायी) |
| धावपटू कॅरिब 95 | 1988-1995 | 4AT A241H | इंटरएक्सल - हायड्रोमेकॅनिकल कपलिंग |
| धावपटू कॅरिब 110 | 1995-2002 | 4AT A241H | इंटरएक्सल - हायड्रोमेकॅनिकल कपलिंग |
| Vista/Camry 20 | 1988-1990 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| Vista/Camry 30 | 1990-1994 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
| Vista/Camry 40 | 1994-1998 | 4AT A540H+AF2BE | इंटरएक्सल - इलेक्ट्रॉनिक नियंत्रणासह हायड्रोमेकॅनिकल क्लच |
|
१.१.२. STD II सर्किट |
 |
या योजनेमध्ये, टॉर्सन प्रकाराचा एक पर्यायी मागील मर्यादित-स्लिप फरक वापरला जात असे.
| मॉडेल | सोडा | संसर्ग | विभेदक कुलूप |
| अल्फार्ड १० | 2002-2008 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| Caldina 215W GTT | 1997-2002 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी |
| Caldina 246 GT4 | 2002-2007 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| हॅरियर 10 | 1997-2003 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| हॅरियर ACU35/GSU3# | 2003-2013 | 4AT U140F+MF2AV 5AT U151F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| डोंगराळ प्रदेशातील 20 | 2000-2003 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| क्लुगर | 2000-2007 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| Lexus RX MCU3# | 1998-2003 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
| Lexus RX350 GSU3# | 2006-2008 | 5AT U151F+MF2AV | इंटरएक्सल - चिकट जोडणी |
| RAV4 20 | 2000-2006 | 4AT U140F+MF2AV | इंटरएक्सल - चिकट जोडणी, मागील - टॉर्सन (पर्यायी) |
|
१.१.३. VSC+ सर्किट |
 |
स्टॅबिलायझेशन सिस्टम (व्हीएससी) वापरून लॉकचे अनुकरण केले जाते - स्लिपिंग व्हील जबरदस्तीने ब्रेक केले जाते, ज्यामुळे त्याच अक्षाच्या दुसऱ्या चाकावर टॉर्क वाढतो. त्याचप्रमाणे, टॉर्क पुढच्या आणि मागील एक्सलमध्ये पुन्हा वितरित केला जातो.
|
१.२.१. व्ही-फ्लेक्स I सर्किट |
 |
सिलिकॉन द्रवाने भरलेले एक चिकट कपलिंग मध्यवर्ती दोन भागांना जोडते कार्डन शाफ्टआणि जेव्हा कार पुढच्या चाकांमध्ये लक्षणीय घसरते तेव्हा ट्रिगर होते;
| मॉडेल | सोडा | संसर्ग |
| bB 30 | 2000-2005 | 4AT U340F |
| फनकार्गो | 1999-2005 | 4AT U340F |
| पूर्व 60 | 2002-2007 | 4AT U340F |
| Platz | 1999-2005 | 4AT U340F |
| पोर्टे 10 | 2004-2012 | 4AT U340F |
| प्रोबॉक्स/यशस्वी 50 | 2002-2014 | 4AT U340F |
| Probox/Succeed 160 | 2014-.. | CVT K310F |
| रौम १० | 1997-2003 | 4AT A244F+CF1A |
| रौम 20 | 2003-2011 | 4AT U340F |
| स्टारलेट 80 | 1989-1996 | 4AT A244F+CF1A |
| स्टारलेट 90 | 1996-1999 | 4AT A244F+CF1A |
| Tercel / Corsa / Corolla II 40 | 1990-1994 | 4AT A244F+CF1A |
| Tercel / Corsa / Corolla II 50 | 1994-1999 | 4AT A244F+CF1A |
| विट्झ १० | 1999-2005 | 4AT U340F+MF1A |
| विल सायफा | 2002-2005 | 4AT U340F |
|
१.२.२. व्ही-फ्लेक्स II सर्किट |
 |
सिलिकॉन द्रवपदार्थाने भरलेले एक चिकट कपलिंग ड्राइव्हशाफ्टला जोडते इनपुट शाफ्टमागील गीअरबॉक्स, जेव्हा समोरच्या चाकांमध्ये लक्षणीय घसरण होते तेव्हा ट्रिगर होतो, उर्वरित वेळ कार फ्रंट-व्हील ड्राइव्ह राहते.
| मॉडेल | सोडा | संसर्ग |
| Avensis 250 | 2003-2008 | 4AT A248F |
| bB 20* | 2006-2016 | - |
| बेल्टा | 2005-2012 | 4AT U441F |
| कॅल्डिना 215G | 1997-2002 | 4AT A241F,A243F+MF1A |
| कॅल्डिना 240 | 2002-2007 | 4AT A248F+MF1A |
| Camry / Camry Gracia / Mark II Qualis V20 | 1997-2001 | 4AT A541F |
| Camry V30 | 2001-2006 | 4AT U140F"" |
| Camry V40 | 2006-2011 | 4AT U140F"" |
| कॅरिना 210 | 08.1998-2001 | 4AT A241F,A243F+MF1A |
| कोरोला/फिल्डर/रन्क्स/ॲलेक्स 120 | 2000-2006 | 4AT U340F,U341F+MF1A |
| Corolla Axio / Fielder 140 | 2006-2012 | CVT K310F, K311F |
| Corolla Spacio 120 | 2001-2007 | 4AT U341F |
| कोरोना 210 | 12.1997-2001 | 4AT A241F,A243F+MF1A |
| युगल गीत* | 1998-2004 | - |
| मॅट्रिक्स 130 | 2002-2006 | 4AT U341F |
| ओपा | 2000-2005 | 4AT U341F+MF1A |
| पासो १०* | 2004-2010 | - |
| पासो 20* | 2010-2016 | - |
| पासो ७००* | 2016-.. | - |
| पिक्सिस युग* | 2012-2017 | - |
| पिक्सिस जॉय* | 2016-.. | - |
| पिक्सिस मेगा* | 2015-.. | - |
| पिक्सिस स्पेस* | 2011-.. | - |
| Premio / Allion 240 | 2001-2007 | 4AT U341F+MF1A |
| Premio / Allion 260 | 2007-2014 | CVT K311F |
| रॅक्टिस 100 | 2005-2010 | 4AT U340F |
| सिएंटा 80 | 2003-2015 | 4AT U340F |
| टाकी/खोली* | 2016-.. | - |
| व्हिस्टा 50 | 1998-2003 | 4AT U240F+MF1A |
| विट्झ 90 | 2005-2010 | 4AT U441F |
| व्होल्ट्झ | 2002-2004 | 4AT U341F |
| विल व्ही.एस | 2001-2004 | 4AT U341F |
|
१.२.३. ATC सर्किट (DTC) |
 |
कपलिंग ड्राइव्हशाफ्टला मागील गिअरबॉक्सच्या इनपुट शाफ्टशी जोडते. बहुतेक प्रकरणांमध्ये, कार फ्रंट-व्हील ड्राइव्ह राहते, परंतु आवश्यक असल्यास, नियंत्रण प्रणाली स्वयंचलितपणे टॉर्कचे प्रोग्राम केलेले मूल्य राखते. मागील चाके ().
मूळ नाव "सक्रिय टॉर्क नियंत्रण" होते; 2012 नंतर, काही मॉडेल्सवर सिस्टमला "डायनॅमिक टॉर्क कंट्रोल" असे नाव मिळाले.
ड्रायव्हर-साइड कंट्रोल लागू करण्यासाठी अनेक पर्याय आहेत:
 |
 |
"लॉक" बटण (एसयूव्ही) - "ऑटो 4WD" आणि "लॉक" मोडसह. नेहमीच्या मोडमध्ये ऑल-व्हील ड्राईव्ह कनेक्शनचे स्वयंचलित नियंत्रण असते;
बटणे नाहीत (काही मॉडेल जपानी बाजार) - स्वयंचलित ऑल-व्हील ड्राइव्ह कंट्रोल मोड सतत सक्रिय केला जातो.
| मॉडेल | सोडा | संसर्ग |
| अल्फार्ड/वेलफायर २० | 2008-2015 | 6AT U660F |
| अल्फार्ड/वेलफायर ३० | 2015-.. | CVT K115F |
| ऑरिस 150 | 2007-2012 | CVT K310F, K311F |
| ऑरिस 180 | 2012-2018 | CVT K310F |
| ब्लेड 150 | 2007-2012 | CVT K112F |
| C-HR | 2016-.. | CVT K313F |
| Corolla Axio / Fielder 160 | 2012-.. | CVT K310F |
| कोरोला रुमिओन 150 | 2007-2016 | CVT K311F |
| कोरोला स्पोर्ट 210 | 2018-.. | CVT K310F |
| अंदाज 40 | 1999-2006 | 4AT U140F""" |
| अंदाजे 50 | 2006-.. | 6AT U660F""" |
| गाया | 1998-2004 | 4AT A243F+MF1A |
| हॅरियर 60 | 2013-.. | CVT K114F |
| डोंगराळ प्रदेशातील 50 | 2013-.. | 6AT U660F |
| इप्सम १० | 04.1998-2001 | 4AT A243F+MF1A |
| इप्सम २० | 2001-2009 | 4AT A243F+MF1A |
| इसिस | 2004-2017 | CVT K111F, K311F |
| प्रथम ११० | 2007-2016 | CVT K310F |
| लेक्सस NX | 2014-.. | 6AT U661F |
| लेक्सस RX GGL15 | 2008-2015 | 6AT U660F |
| लेक्सस RX AL20 | 2015-.. | 6AT U661F, 8AT U881F |
| मार्क एक्स झिओ | 2007-2013 | CVT K112F |
| मॅट्रिक्स 140 | 2008-2013 | 4AT U140F"" |
| नादिया | 1998-2003 | 4AT A243F+MF1A |
| नोहा/व्हॉक्सी ६० | 2001-2007 | CVT K111F, 4AT A248F |
| नोहा/व्हॉक्सी ७० | 2007-2014 | CVT K111F |
| नोहा/व्हॉक्सी/एस्क्वायर 80 | 2014-.. | CVT K114F |
| पोर्टे / स्पेड 140 | 2012-.. | CVT K310F |
| Premio / Allion 260 | 2014-.. | CVT K311F |
| रॅक्टिस 120 | 2010-2016 | CVT K310F |
| RAV4 30/Vanguard | 2006-2016 | CVT K111F, K112F, 5/6AT U151F, U660F |
| RAV4 40 | 2013-2018 | CVT K111F, 6AT U660F, U760F |
| RAV4 50 (कमी ग्रेड) | 2018-.. | CVT K120F |
| सिएना 30 | 2010-.. | 6AT U660F |
| सिएंटा 170 | 2015-.. | CVT K310F |
| व्हेन्झा १० | 2008-2017 | 6AT U660F, U760F |
| विट्झ 130 | 2010-.. | CVT K310F |
| इच्छा १० | 2003-2009 | 4AT U341F |
| इच्छा 20 | 2009-2017 | CVT K311F |
|
१.२.४. डीटीव्ही योजना |
 |
बहुतेक प्रकरणांमध्ये, कार फ्रंट-व्हील ड्राइव्ह राहते; आवश्यक असल्यास, नियंत्रण प्रणाली स्वयंचलितपणे प्रत्येक मागील चाकांवर प्रसारित टॉर्कची मात्रा समायोजित करते. याव्यतिरिक्त, एक उद्घाटन आहे पॉवर ट्रान्समिशनट्रान्सफर केस आणि मागील गिअरबॉक्समध्ये, जेणेकरून 2WD मोडमध्ये ड्राइव्हशाफ्ट आणि गीअर्स व्यर्थ फिरत नाहीत.
|
१.३.१. E-4WD आकृती |
 |
मागील दोन प्रकार आहेत पॉवर मॉड्यूल्सइलेक्ट्रिक मोटर आणि गिअरबॉक्ससह - एक क्लासिक थ्री-शाफ्ट (अनेक पॉवर आणि टॉर्क पर्यायांमध्ये) आणि कमी-पावर इलेक्ट्रिक मोटर (HV4WD) सह कॉम्पॅक्ट टू-शाफ्ट.
| मॉडेल | सोडा | मागील इलेक्ट्रिक मोटर (kW/Nm) |
| अल्फार्ड ATH10 | 2003-2008 | 1FM (18/108) |
| Alphard/Vellfire ATH20 | 2008-2015 | 2FM (50/130) |
| अल्फार्ड/वेलफायर AYH30 | 2015-.. | 2FM (50/139) |
| अंदाज AHR10 | 2001-2006 | 1FM (18/108) |
| अंदाज AHR20 | 2006-.. | 2FM (50/130) |
| हॅरियर MHU38 | 2005-2012 | 2FM (50/130) |
| हॅरियर AVU65 | 2013-.. | 2FM (50/139) |
| डोंगराळ प्रदेशातील MHU28 | 2005-2007 | 2FM (50/130) |
| डोंगराळ प्रदेशातील MHU48 | 2007-2010 | 2FM (50/130) |
| हाईलँडर GVU48 | 2010-2014 | 2FM (50/130) |
| हाईलँडर GVU58 | 2014-.. | 2FM (50/139) |
| क्लुगर MHU28 | 2005-2007 | 2FM (50/130) |
| लेक्सस RX400h MHU38 | 2005-2008 | 2FM (50/130) |
| लेक्सस RX450h GYL15 | 2009-2015 | 2FM (50/130) |
| लेक्सस RX450h GYL25 | 2015-.. | 2FM (50/139) |
| लेक्सस NX300h AYZ15 | 2014-.. | 2FM (50/139) |
| लेक्सस UX250h MZAH15 | 2018-.. | 1MM (5/55) |
| प्रियस ZVW55 | 2015-.. | 1MM (5.3/55) |
| RAV4 AVA44 | 2015-.. | 2FM (50/139) |
| RAV4 AXAH54 | 2018-.. | - (40/120) |
आख्यायिका: टीएम - ट्रान्समिशन (गियरबॉक्स, व्हेरिएटर), टीआर - ट्रान्सफर केस, एफडी - फ्रंट डिफरेंशियल, आरडी - रिअर डिफरेंशियल, सीडी - सेंटर डिफरेंशियल, सीडीसी - हायड्रोमेकॅनिकल क्लच, व्हीसी - व्हिस्कस क्लच, ईसी - इलेक्ट्रोमेकॅनिकल क्लच.
|
विकास, कार्यक्षमता, विश्वसनीयता |
मूळ फ्रंट-व्हील ड्राईव्ह कारवर टोयोटा 4WD साठी काउंटडाउन 1988 मध्ये शोधले जाऊ शकते.
योजना STD I, जे जपानी ऑटोमोटिव्ह उद्योगातील सर्वात "फॅट इयर्स" मध्ये दिसून आले, सर्व-व्हील ड्राईव्ह भिन्नतांपैकी सर्वात प्रगत, विश्वासार्ह आणि कार्यक्षम राहिले आहे. टोयोटा कार. हे "पूर्ण-वेळ 4WD" खरोखरच कायमस्वरूपी, पूर्ण आणि महत्त्वाचे म्हणजे, त्रास-मुक्त आणि टिकाऊ स्वयंचलित ट्रांसमिशनच्या आधारावर तयार केले गेले. एकमात्र मूलभूत कमतरता (आधुनिक मानकांनुसार) कोणत्याही इंटर-व्हील लॉकची अनुपस्थिती आहे, ज्यामुळे कार सशर्त कर्णरेषा लटकण्यासाठी संवेदनशील बनते. दुर्दैवाने, प्रकाशन नवीनतम मॉडेल STD सह मी 2002 मध्ये संपलो.
सर्वात तरुण बी-क्लास मॉडेल्ससाठी, टोयोटाने योजनेनुसार स्वतःला प्लग-इन ऑल-व्हील ड्राइव्हपर्यंत मर्यादित केले आणि 1980 च्या दशकाच्या उत्तरार्धापासून ते 2010 पर्यंत या संकल्पनेचे पालन केले. सध्या, ही योजना एकल, उपयुक्ततावादी टोयोटा मॉडेलवर वापरली जाते.
1990 च्या प्रदीर्घ संकटामुळे एकूण बचत हा एक नवीन ट्रेंड बनला - सामग्रीवर उपयुक्त पर्याय, आणि, अर्थातच, डिझाइनच्या परिपूर्णतेवर. टोयोटा 4WD साठी, 1997 नंतर टर्निंग पॉइंट आला - योजनेच्या लॉन्चिंग आणि मोठ्या प्रमाणावर अंमलबजावणीसह, सर्वात प्रगत प्रणालींपैकी एक सर्वात आदिम प्रणालीने बदलली गेली. तिचे जन्मजात दोष सुप्रसिद्ध आहेत:
- चिपचिपा कपलिंगचे विलंबित "ऑपरेशन",
- सक्रिय ड्रायव्हिंग दरम्यान संभाव्य धोका,
- कपलिंगची कमी टिकाऊपणा.
अर्थात, असा संशयास्पद 4WD देखील सिंगल-व्हील ड्राइव्हपेक्षा श्रेयस्कर राहिला, परंतु समस्या अशी होती की अनुभवी टोयोटाच्या मालकांकडे त्याची तुलना करण्यासारखे काहीच नव्हते. 2015 नंतर, V-Flex II यापुढे टोयोटाच्या स्वतःच्या घडामोडींवर वापरला जाणार नाही, फक्त रीबॅज केलेल्या Daihatsu मॉडेल्सचा गुणधर्म राहिला.
आज जगातील सर्वात सामान्य प्रकारचा ऑल-व्हील ड्राइव्ह - मागील चाकांना जोडण्यासाठी इलेक्ट्रोमेकॅनिकल क्लचसह - 1998 मध्ये टोयोटास वर दिसला ( ATC). सुरुवातीला - मिनीव्हॅनवर, परंतु हळूहळू ते खालच्या श्रेणीत आले, व्ही-फ्लेक्स विस्थापित केले आणि एसयूव्हीमध्ये, पूर्ण-वेळचे अवशेष काढून टाकले. योजनेचे तोटे:
- अवरोधित करण्याची मर्यादित डिग्री,
- लोड अंतर्गत मर्यादित ऑपरेटिंग वेळ,
- कपलिंग सपोर्ट बेअरिंग्जचा पोशाख ().
एकंदरीत, ATC पूर्णवेळ ऑल-व्हील ड्राइव्हइतके कार्यक्षम नाही, परंतु V-Flex पेक्षा लक्षणीयरित्या श्रेष्ठ आहे.
आणखी एक मुद्दा लक्षात घेण्यासारखा आहे - 1990 च्या दशकाच्या शेवटी टोयोटा/आयसिन स्वयंचलित मशीनच्या नवीन मॉडेल्सच्या देखाव्याने चिन्हांकित केले गेले ( नवीनतम आवृत्त्यामालिका A24#, U-मालिका), ज्याचे सेवा जीवन त्यांच्या पूर्ववर्तींच्या तुलनेत आमूलाग्रपणे कमी केले गेले होते, जे विशेषतः परिस्थितीत लक्षणीय होते. वाढलेले भारऑल-व्हील ड्राइव्हवरून. परिणामी, 4WD ट्रान्समिशन केवळ कमी कार्यक्षमच नाही तर कमी विश्वासार्ह देखील झाले आहेत.
SUV/क्रॉसओव्हर क्लाससाठी ज्याने त्यावेळेस वेग घेतला होता, टोयोटाने सर्वात सोप्या आवृत्तीमध्ये कायमस्वरूपी ऑल-व्हील ड्राइव्ह राखून ठेवली (), जी त्यांनी प्रत्यक्षात उधार घेतली होती. मागील मॉडेलमॅन्युअल गिअरबॉक्सेससह (कदाचित चार ऐवजी पाच उपग्रह मध्यभागी अंतर ठेवून). हायड्रोमेकॅनिकलच्या तुलनेत चिपचिपा कपलिंगच्या अपेक्षित कमी कार्यक्षमतेने या प्रकरणात देखील कार्यप्रदर्शन वैशिष्ट्यांवर परिणाम केला.
2000 च्या दशकाच्या मध्यापर्यंत, तांत्रिक विकासामुळे चिपचिपा कपलिंग्ज पूर्णपणे सोडून देणे शक्य झाले, सर्व तीन भिन्नता मुक्त राहून ( VSC+) - आता ब्रेकिंग सिस्टम वापरून लॉकचे अनुकरण केले गेले. हे समाधान फार काळ उत्पादनात राहिले नाही आणि एका पिढीनंतर सर्व SUV ला ATC-प्रकारचे ऑल-व्हील ड्राइव्ह मिळाले.
सर्वसाधारणपणे, स्थिरीकरण प्रणालीच्या सक्रिय परिचयाने (जपानी ब्रँडसाठी - 2000 च्या उत्तरार्धापासून) आणि ब्रेक वापरुन क्रॉस-एक्सल डिफरेंशियल लॉकच्या अनुकरणाच्या आगमनाने, जगाची सुरुवात झाली. नवीन टप्पाऑल-व्हील ड्राइव्हचा विकास. काही उत्पादकांसाठी, प्लग-इन 4WD आणि ESP चे संयोजन क्लासिक पर्मनंट ऑल-व्हील ड्राईव्हच्या काही प्रकारांपेक्षा जास्त "सॉफ्ट" सेंटर लॉकिंग किंवा त्याच्या इम्युलेशनपेक्षा चांगला परिणाम देते. परंतु टोयोटाच्या बाबतीत नाही - वेगवेगळ्या ब्रँडच्या आधुनिक एसयूव्हीच्या वास्तविक वर्तनाची तुलना करताना, एखाद्याने हे मान्य केले पाहिजे की प्लग-इन ऑल-व्हील ड्राइव्ह आणि क्रॉस-व्हील लॉकचे अनुकरण करण्यासाठी टोयोटाच्या सेटिंग्ज अत्यंत अयशस्वी आहेत.
नाही सर्वोत्तम शक्य मार्गानेसीव्हीटीच्या बाजूने स्वयंचलित ट्रांसमिशन नाकारल्यामुळे ऑल-व्हील ड्राईव्हच्या शक्यतांवर परिणाम झाला, जो हळूहळू 2000 च्या दशकाच्या मध्यात सुरू झाला (सिंगल-व्हील ड्राइव्हच्या आवृत्त्यांनी त्या आधीही प्राप्त केल्या). जर खालच्या वर्गातील हलक्या कारसाठी हे तितकेसे महत्त्वाचे नसेल, तर मिनीव्हन्स आणि विशेषतः क्रॉसओव्हर्ससाठी, हे व्हेरिएटर आहे जे सर्वात अरुंद, सर्वात असुरक्षित आणि बनते. महाग जागाइंजिनपासून चाकांपर्यंत पॉवर ट्रान्समिशन चेनमध्ये.
सशर्त ऑल-व्हील ड्राइव्हचा आणखी एक प्रकार, 2001 पासून ओळखला जातो, असंख्य हायब्रिड मॉडेल्सद्वारे तयार केला गेला आहे ( E-4WD). कल्पनेची बाह्य मोहक असूनही, मागील इलेक्ट्रिक मोटरच्या टॉर्कचे सुंदर संख्या आणि आलेख, प्रत्यक्षात ट्रॅक्शन क्षमता अपेक्षेनुसार जगू शकली नाही - कार्यक्षमतेच्या बाबतीत, E-4WD समान एटीसीपर्यंत पोहोचत नाही. नॉन-हायब्रिड मॉडेल.
"टॉर्क वेक्टरिंग" च्या तत्त्वावर काम करणारे स्वतःचे सर्किट ( डीटीव्ही) Toyota ने ते फक्त 2018 मध्ये सादर केले, Nissan पेक्षा आठ वर्षांनी, Honda पेक्षा जवळपास पंधरा वर्षांनंतर आणि MMC नंतर दोन दशकांनी. पोटीअस सेरो क्वाम ननक्वम.
तर फोर-व्हील ड्राइव्ह आणि ऑल-व्हील ड्राइव्हमध्ये काय फरक आहे? ते अस्तित्त्वात आहे का आणि कोणती ऑल-व्हील ड्राइव्ह सिस्टम निवडणे चांगले आहे? या प्रश्नाचे उत्तर एखाद्याच्या अपेक्षेपेक्षा जास्त क्लिष्ट असेल. सिस्टीम प्लग करण्यायोग्य आहेत, नेहमी चालू आहेत किंवा आवश्यकतेनुसार त्यांना सक्तीने चालू केले जाते? ते काही घटक पूर्ण झाल्यावर कनेक्ट केलेले आहेत किंवा ते आगाऊ स्वयंचलितपणे चालू आहेत? ते हायड्रॉलिक क्लच, इलेक्ट्रोमॅग्नेटिक क्लच किंवा पूर्णपणे भिन्न प्रणाली वापरतात? ते लीव्हर चालू करतात, डायल चालू करतात, बटण दाबतात किंवा आवश्यकतेनुसार जादूने काम करण्यास सुरवात करतात? या प्रश्नांची उत्तरे देण्यासाठी, प्रत्येक प्रणाली स्वतंत्रपणे एक उदाहरण वापरून परदेशी अनुभवसमान ड्राइव्ह तयार करणे.
80 च्या दशकाच्या शेवटी, ऑल-व्हील ड्राइव्ह वाहने त्यांच्या यंत्रणेच्या साधेपणाने, उच्च विश्वासार्हतेद्वारे ओळखली गेली आणि वाहतुकीची पूर्णपणे उपयुक्ततावादी साधनं होती. त्यांच्यावर अनेकदा शिकारी, शेतकरी आणि गुरेढोरे चालवणारे होते. हे लोक पांढरे हाताचे नव्हते आणि कोणत्याही परिस्थितीत आणि कोणत्याही दुर्गम चिखलात, समोरचा एक्सल सक्रिय करण्यासाठी फक्त हब जोडू शकतात. तथापि, कालांतराने, आणि शहरी लोकसंख्येमध्ये, ज्यांना यापुढे चिखलात गुडघ्यापर्यंत पोहण्याची आणि व्यर्थ गलिच्छ होण्याची इच्छा नव्हती, ऑल-व्हील ड्राईव्ह बांधवांनी लोकशाहीकरण आणि ऑल-व्हील ड्राइव्हच्या सुलभतेच्या दिशेने त्याच्या उत्क्रांतीवादी विकासास सुरुवात केली. प्रणाली, साध्या अप्रशिक्षित लोकांना ऑल-व्हील ड्राइव्ह सिस्टमचे सर्व फायदे उपभोगण्याची संधी देते.
हे ऐकणे मजेदार आहे, विशेषत: अशा प्रणालींचा मूळ उद्देश आणि त्यांच्यासह सुसज्ज कार लक्षात घेता.
कथा
काल कारवरील ऑल-व्हील ड्राइव्ह सिस्टमचा शोध लागला नाही. त्यांची उत्पत्ती मागील शतकापूर्वीची आहे.
1893 मध्ये, इंग्रज अभियंता-संशोधक ब्रमाह जोसेफ डिप्लॉकने ट्रॅक्टर-ट्रॅक्टरसाठी ऑल-व्हील ड्राइव्ह प्रणाली डिझाइन आणि लागू केली. डिझाइन, अगदी आधुनिक मानकांनुसार, आदर करते, त्या वर्षांत ती अभियांत्रिकी कलेची उंची होती. ऑल-टेरेन ट्रॅक्टरने तीन भिन्नता आणि ऑल-व्हील ड्राइव्ह सिस्टम वापरून ऑफ-रोड परिस्थिती जिंकली.
अंतर्गत ज्वलन इंजिन असलेली पहिली ऑल-व्हील ड्राइव्ह कार स्पायकर 60 एचपी होती, जी डच बंधू जेकोबस आणि हेंड्रिक-जॅन स्पायकर यांनी टेकडीवर चढण्यासाठी दोन-सीटर स्पोर्ट्स कार म्हणून तयार केली होती. या महत्त्वाचा टप्पाऑल-व्हील ड्राइव्ह सिस्टमचा विकास 1903 मध्ये झाला.
त्यानंतर डेमलर-मोटोरेन-गेसेलशाफ्टने बांधलेले जर्मन, अप्रतिम दिसणारे डर्नबर्ग-वगेन होते. त्यानंतर विविध प्रोटोटाइपची संपूर्ण आकाशगंगा आली आणि विश्वासार्ह, नम्र आणि इष्टतम डिझाइनचा शोध घेतला.

युद्धपूर्व वर्षांमध्ये, द्वितीय विश्वयुद्धापूर्वी, मर्सिडीज-बेंझच्या सहकार्याने, काम केले. असामान्य निर्मितीद्वारे प्रयत्नांना पुरस्कृत केले गेले आणि अद्वितीय कार. पण दुसऱ्याला खरी, चांगली प्रसिद्धी मिळाली. पौराणिक कारयुद्धाची वर्षे, जे दुसऱ्या खंडातून आले होते, जे ब्रायन्स्क प्रदेश, मॉस्को प्रदेश, बेलारूस, पोलंड आणि शेवटी स्वतः जर्मनीच्या दुर्गम बॉम्ब रस्त्यावरून आमच्या आजोबांसोबत लष्करी मार्गावर शेजारी चालत होते - .
ऑल-व्हील ड्राइव्ह कंट्रोल सिस्टम सोपी आणि प्रभावी होती. जीपचा एक लीव्हर फोर-व्हील ड्राइव्ह चालू केला, दुसरा निवडकर्ता निवडू शकतो ओव्हरड्राइव्ह, तटस्थ किंवा कमी गीअर्स.
फोर-व्हील ड्राइव्ह प्रणाली 1950 आणि 1960 च्या दशकात विकसित झाली. फ्रंट हबचे बाह्य लॉकिंग दिसू लागले आहे, ज्यामुळे इंधन कार्यक्षमता आणि वेगाची कार्यक्षमता सुधारण्यासाठी फ्रंट एक्सल अक्षम करणे शक्य झाले आहे. 1963 मध्ये, कौटुंबिक ऑल-व्हील ड्राइव्ह जीप वॅगोनियर विकत घेतले स्वयंचलित प्रेषणसंसर्ग दहा वर्षांनंतर, अद्ययावत मॉडेलमध्ये क्वाड्रा-ट्रॅक, उद्योगातील पहिली स्वयंचलित पूर्ण-वेळ चार-चाकी ड्राइव्ह प्रणाली वैशिष्ट्यीकृत आहे.
ऑल-व्हील ड्राइव्ह प्रवासी कारकडे जात आहे. त्याच वेळी, जेव्हा अमेरिकन अभियंते "भारी तोफखाना" विकसित करत होते, तेव्हा त्यांनी प्रवासी गाड्यांवर ऑल-व्हील ड्राइव्ह प्रणाली कलम करण्याचा प्रयत्न केला. ऑफ-रोड ड्राइव्हचे सहजीवन आणि प्रवासी कार शरीरलिओन मध्ये मूर्त स्वरूप होते. मॉडेल 1972 मध्ये दिसू लागले. त्याची विशिष्ट वैशिष्ट्ये प्लग-इन ऑल-व्हील ड्राइव्ह असलेली एक प्रणाली होती, ज्याने खराब हवामान किंवा रस्त्याच्या परिस्थितीत मालकांना चांगली मदत केली.
1980 मध्ये, AMC ने ईगल मॉडेल जारी केले, ज्याने त्या वर्षातील ऑल-व्हील ड्राईव्ह पॅसेंजर कारमध्ये मानक सेट केले. मॉडेल कायमस्वरूपी स्वयंचलित ऑल-व्हील ड्राइव्हसह सुसज्ज होते. त्याच वेळी, एक वास्तविक आख्यायिका दिसून येते, सह प्रथम जन्मलेले कायमस्वरूपी ड्राइव्हऑल-व्हील ड्राइव्हचा वापर पहिल्यांदाच ऑफ-रोड कामगिरी सुधारण्यासाठी नव्हे, तर ऑन-रोड पकड, हाताळणी आणि क्रीडा क्षेत्रातील कामगिरी सुधारण्यासाठी करण्यात आला.
1983 जीपला नवीन सिलेक्ट-ट्रॅक प्रणाली मिळत आहे. तेव्हापासून, जीप ऑल-व्हील ड्राईव्हमध्ये हाय स्पीडने चालवू शकते सामान्य रस्तेवितरणासाठी विध्वंसक परिणामांशिवाय. पुढच्या वर्षी, नवीनने अधिक प्रगत कमांड-ट्रॅक ऑल-व्हील ड्राइव्ह सिस्टीम सादर केली, ज्यामुळे जाता जाता फ्रंट एक्सल कनेक्ट करणे शक्य झाले.
90 च्या दशकाच्या मध्यापासून, यूएसमधील जवळजवळ प्रत्येक वाहन निर्मात्याने (स्पोर्ट्स युटिलिटी वाहने) तयार करण्यास सुरुवात केली. पिकअप ट्रकचा फ्रेम बेस आणि मेकॅनिकल 4WD ड्राइव्ह वापरून ते सहज बनवले गेले. तांत्रिकदृष्ट्या, अंतर्गत भाग पुरातन राहिले, परंतु त्यांनी नवीन फॅशनेबल शरीरात काम केले.
SUV च्या सनसनाटी लोकप्रियतेने अनेक वाहन निर्मात्यांना विपणक आणि ग्राहकांच्या नेतृत्वाचे अनुसरण करण्यास भाग पाडले आहे. मृतदेह लोड-बेअरिंग बनवले जाऊ लागले आणि फ्रेमची रचना हळूहळू सोडली गेली. हे दिसून आले, वेगाने विकसित होत आहे आणि नवीन बाजार विभाग जिंकत आहे. AWD प्रणाली* त्यांच्या वातावरणात प्रचलित होऊ लागल्या आहेत.
*ऑल व्हील ड्राइव्ह ( ऑल-व्हील ड्राइव्ह, AWD) दोन्ही एक्सल दरम्यान, तसेच चाकापासून चाकापर्यंत शक्ती प्रसारित करण्यास सक्षम. अधिक सोयीस्कर ऑटोमेटेड ऑल-व्हील ड्राइव्ह सिस्टीम, जे क्लासिक 4WD सारखेच जवळजवळ सर्व फायदे देते, परंतु दैनंदिन वापरासाठी कमी गैरसोयींसह. तथापि, आपल्याला ड्राइव्हच्या कमी विश्वासार्हतेसह सोयीसाठी पैसे द्यावे लागतील.
4WD

4WD ड्राइव्ह सिस्टीम सामान्यतः वापरासाठी डिझाइन केलेले आहेत. या प्रणालीसह सुसज्ज असलेल्या वाहनांमध्ये कमी श्रेणीचा गियर सेट आहे, तसेच मॅन्युअल किंवा स्वयंचलित हस्तांतरण केस आहे.
4WD असलेल्या कार्स अनेकदा विशेष गुणधर्मांद्वारे ओळखल्या जाऊ शकतात: उच्च ग्राउंड क्लीयरन्स (SUV च्या महागड्या आवृत्त्यांवर आपण उंची-ॲडजस्टेबल सस्पेंशनबद्दल बोलू शकतो), चांगले सर्व-भूप्रदेश कोन, ज्याला समोरचा दृष्टिकोन कोन आणि मागील बाजूस प्रस्थान कोन देखील म्हणतात. , ज्यामुळे उतारावर चढून जाणे आणि अडथळ्यांवर जाणे शक्य होते.

सर्व-भूप्रदेश वाहने प्रबलित निलंबन प्रणालीसह सुसज्ज आहेत आणि अतिरिक्त प्रणालीवाढत्या कर्षण, जसे की डिफरेंशियल लॉक, ऑफ-रोड ड्रायव्हिंगसाठी सहाय्यक प्रणाली (आधुनिक टोयोटा एसयूव्हीमध्ये) आणि थांब्यापासून चढावर जाणे, तसेच स्विच करण्यायोग्य अँटी-रोल बार.
काही 4WD प्रणालींमध्ये, उदाहरणार्थ, गेलंडवॅगन प्रमाणे, मध्यभागी देखील अवरोधित केले जाते, ज्यामुळे गंभीर ऑफ-रोड परिस्थितींवर मात करण्याची शक्यता लक्षणीय वाढते.

भिन्नता इलेक्ट्रॉनिक, यांत्रिक किंवा हायड्रॉलिक पद्धतीने नियंत्रित केली जाऊ शकतात.
4WD ऑल-व्हील ड्राइव्ह सिस्टम भूतकाळातील जवळजवळ सर्व SUV वर आढळू शकते. आजपर्यंत, बरेच पिकअप ट्रक उत्पादक अजूनही 4WD मॉडेल वापरतात, परंतु कल असा आहे की ते अधिकाधिक दुर्मिळ होत आहेत. अगदी एकदा क्रूर लष्करी मॉडेल मुख्य प्रवाहात AWD वर स्विच करत आहेत! म्हणून, आधुनिक ऑल-व्हील ड्राइव्ह सिस्टमचा पूर्वज एक लुप्तप्राय प्रजाती मानला जाऊ शकतो.
AWD

ऑल-व्हील ड्राइव्ह हा ऑल-व्हील ड्राईव्हचा एक प्रकार आहे जो दोन्ही एक्सलला पॉवर पाठवतो, एक्सल किंवा व्हीलमधून टॉर्कचे पुनर्वितरण करून चाकाला कमी कर्षण असलेल्या अधिकसह. AWD सिस्टीम सर्व-हवामान परिस्थितीत रस्ता/ग्राउंड ट्रॅक्शन आणि कार्यप्रदर्शन सुधारण्यासाठी तसेच हलक्या ते मध्यम ऑफ-रोड परिस्थितीत वाहनाच्या क्षमता वाढविण्यासाठी डिझाइन केल्या आहेत.
सर्वात सामान्य AWD सेटअपमध्ये पुढील आणि मागील दरम्यान फरक समाविष्ट आहे ड्राइव्ह शाफ्ट, पूर्वीच्या काही 4WD प्रणालींप्रमाणे. काही कार पूर्णवेळ ऑल-व्हील ड्राइव्ह वापरतात, जी सतत सर्व चार चाकांना पॉवर पाठवते, तर इतरांवर, आवश्यकतेनुसार एक एक्सल गुंतलेला असतो. अशा परिस्थितीत, क्रॉसओवर किंवा क्रॉस-कंट्री वाहन (प्रकार) एकाच ड्राइव्हवर चालते.
इलेक्ट्रॉनिकली नियंत्रित ट्रॅक्शन कंट्रोल ब्रेक्सच्या वापराने अनेकदा इच्छित एक्सल टॉर्क मिळवला जातो, जेव्हा ऑल-व्हील ड्राइव्ह सिस्टमला चाक स्लिपेज आढळते किंवा चाकाच्या गतीमध्ये फरक दिसतो, तेव्हा ब्रेक लावले जातात आणि नियंत्रित टॉर्क वितरण होते. जवळजवळ सर्व आधुनिक ऑल-व्हील ड्राइव्ह सिस्टम ड्रायव्हरच्या हस्तक्षेपाशिवाय कार्य करतात, त्या संगणक कोडच्या अंतहीन साखळीद्वारे नियंत्रित केल्या जातात. जटिल अल्गोरिदमजे स्टीयरिंगचे निरीक्षण करते, थ्रोटल वाल्वआणि ब्रेक यंत्रणा. रस्त्यावरील पकड सुधारणे हे या तांत्रिक पुरस्काराचे एकमेव ध्येय आहे.

नवीन DYNAMAX ऑल-व्हील ड्राइव्ह सिस्टीममध्ये हे सर्व आणि त्याहूनही अधिक आहे, उदाहरणार्थ, त्यात सेन्सर आहेत जे कारच्या पुढे रस्ता वाचतात, बर्फ, खड्डे किंवा पाणी असलेले क्षेत्र सक्रियपणे ओळखतात.
आधुनिक परिस्थितीत 4WD आणि AWD ऑल-व्हील ड्राइव्ह सिस्टम एकत्र राहू शकतात का?

ऑल-व्हील ड्राइव्ह वाहने अधिक लोकप्रिय होत आहेत; फ्रंट- किंवा रीअर-व्हील ड्राईव्ह अपोलॉजिस्टचा मुख्य युक्तिवाद, इंधन कार्यक्षमता, कालांतराने पार्श्वभूमीत मिटते, नियंत्रणक्षमता आणि सुरक्षिततेमधील उदयोन्मुख फायद्यांच्या पार्श्वभूमीवर फिकट गुलाबी होते.
काही खरेदीदारांना अजूनही 4WD प्रदान करणारे फायदे हवे आहेत, जसे की वाढीव टोइंग आणि हलविण्याची क्षमता आणि खडबडीत ग्रेड किंवा खडबडीत भूभागावर वापर, परंतु बहुतेक ग्राहकांसाठी, AWD सर्वात जास्त फायदा आणि सर्वात कमी खर्च देते.
AWD भविष्यात कसे दिसेल? 1899 मध्ये हुशार फर्डिनांड पोर्शने तयार केलेल्या कारच्या प्रकारानुसार आणि प्रतिमेनुसार तयार केलेल्या या वेगळ्या असतील? कदाचित एखाद्या दिवशी, परंतु आता नाही.
» कारवर 4WD म्हणजे काय आणि ऑल-व्हील ड्राइव्हबद्दल तुम्हाला काय माहित असणे आवश्यक आहे
4WD - कारवरील ऑल-व्हील ड्राइव्ह म्हणजे काय, चला ते शोधूया
गाड्या वेगळ्या आहेत. काही केवळ पक्क्या रस्त्यावर वाहन चालविण्यासाठी तयार केले गेले होते. इतर अधिक कठीण भूभागावर मात करण्यासाठी आहेत. पारंपारिक ऑपरेटिंग निर्देशांमध्ये हे योगायोग नाही प्रवासी गाड्यात्यांचा वर्ग दर्शविला आहे - रस्ता. ऑल-व्हील ड्राइव्ह असलेल्या कारसह, सर्व काही अधिक क्लिष्ट आहे.
ड्राइव्ह नियुक्त करण्यासाठी, व्हील सूत्राचे पदनाम खालीलप्रमाणे स्वीकारले गेले. उदाहरणार्थ, चाक सूत्र 4X4ड्रायव्हिंग चाकांची संख्या त्यांच्या एकूण संख्येवर दर्शवते. ड्राइव्ह व्हील ही चाके आहेत ज्यांना इंजिनमधून टॉर्क पुरवठा केला जातो. ऑल-व्हील ड्राइव्ह वाहने देखील नियुक्त केली आहेत 4WD, ज्याचा शाब्दिक अर्थ चार-चाकी ड्राइव्ह असा होतो.
अर्थात, 4WD कारचे प्रसारण हे पुढील किंवा मागील चाक ड्राइव्ह असलेल्या कारपेक्षा संरचनात्मकदृष्ट्या अधिक जटिल आहे. करावे असे वाटते ऑफ-रोड वाहन 4WD अगदी सोपे आहे. पण ते खरे नाही.
गिअरबॉक्समधून ड्राईव्ह ॲक्सल्सवर टॉर्क वितरीत करण्यासाठी, दुसर्या युनिटची आवश्यकता आहे - एक हस्तांतरण केस. त्याच्या मदतीने, टॉर्क सर्व ड्राईव्ह एक्सलमध्ये वितरीत केला जातो. टॉर्क वितरण हे मुख्य कार्य आहे ऑल-व्हील ड्राइव्ह ट्रान्समिशन. त्याच वेळी, 4WD ऑल-व्हील ड्राइव्ह असलेल्या सर्व कार एकमेकांपासून संरचनात्मकदृष्ट्या भिन्न आहेत. सर्वात सामान्य कार कायमस्वरूपी ऑल-व्हील ड्राइव्ह असलेल्या आहेत ( पूर्ण वेळ), आणि कनेक्ट केलेले ( अर्ध - वेळ). चला त्यांच्याबद्दल अधिक तपशीलवार बोलूया.
हार्ड प्लग-इन ऑल-व्हील ड्राइव्ह (अर्धवेळ) 4WD.
4WD वाहनासाठी सर्वात सोपा उपाय म्हणजे सर्व ड्राईव्ह एक्सलचे थेट कनेक्शन. या प्रकारचे प्रसारण तुलनेने सोपे आणि विश्वासार्ह आहे. टॉर्क गिअरबॉक्सद्वारे ट्रान्सफर केसला आणि त्यातून एक्सल डिफरन्सियलला आर्टिक्युलेटेड ड्राईव्हद्वारे पुरवला जातो. इंजिनमधील शक्ती थेट पुढच्या आणि मागील एक्सलमध्ये जवळजवळ समान प्रमाणात वितरीत केली जाते.
परिणामी, मागील आणि पुढील दोन्ही चाकांवर टॉर्कचे प्रमाण जवळजवळ समान होते. या टॉर्क वितरणामुळे क्रॉस-कंट्री क्षमता लक्षणीय वाढते. कार महत्त्वपूर्ण ऑफ-रोड परिस्थितीवर मात करू शकते.
टॉर्क वाढवण्यासाठी, आणखी एक रिडक्शन गियर, ज्याला रेंज मल्टीप्लायर म्हणतात, 4WD ट्रान्समिशनमध्ये अतिरिक्तपणे सादर केले जाते. डाउनशिफ्टिंगमध्ये व्यस्त असताना, कारचा वेग लक्षणीयरीत्या कमी होतो, परंतु चाकांवर कर्षण वाढते, ज्यामुळे क्रॉस-कंट्री क्षमता आणखी वाढते. सैल बर्फावर तसेच चिकट मातीवर वाहन चालविण्यासाठी, खाली शिफ्ट करण्याची शिफारस केली जाते.
या डिझाइनमध्ये सर्व क्लासिक 4WD SUV आहेत - अवजड वाहने, एक कठोर फ्रेम बेस आणि अवलंबून, अनेकदा, पुलांच्या सतत बीमसह स्प्रिंग सस्पेंशन. क्लासिक 4WD SUV ची रचना प्रत्यक्षात अमेरिकन मार्किंग असलेल्या कारच्या डिझाइनची पुनरावृत्ती आहे " सामान्य हेतू", ज्याचा शब्दशः अर्थ: "कार सामान्य हेतू" नंतर, या वाक्यांशाचे रूपांतर “जीप” मध्ये झाले जे आपल्यासाठी परिचित झाले आहे.
वाढीव क्रॉस-कंट्री क्षमता केवळ 4WD ऑल-व्हील ड्राईव्हद्वारे अतिरिक्त रिडक्शन गियरद्वारे सुलभ केली जाते. ऑफ-रोड परिस्थितीवर यशस्वी मात करणे मुख्यत्वे वाहनाच्या वजनाचे एक्सेलसह यशस्वी वितरण, तसेच एक कठोर फ्रेम आणि अर्थातच, उच्च आणि शक्तिशाली निलंबन, ज्यामध्ये उभ्या हालचालीदोन्ही चाके एकमेकांशी कठोरपणे जोडलेली आहेत.
हे सर्व चांगल्या ऑफ-रोड कामगिरीमध्ये योगदान देते. जर कार क्रॉस-व्हील सेल्फ-लॉकिंग भिन्नता वापरत असेल, तर तिची क्रॉस-कंट्री क्षमता आणखी वाढते. बहुतेक "क्लासिक" एसयूव्ही या कार आहेत शक्तिशाली इंजिन, उच्च-स्लंग आणि प्रभावी एकूण परिमाणे. अशा कार गंभीर ऑफ-रोड परिस्थितीवर मात करण्यास सक्षम आहेत, बर्फ वाहतोआणि अगदी तीव्र प्रवाहाशिवाय उथळ पाण्याचे शरीर ओलांडते.
सुप्रसिद्ध फायद्यांसह, क्लासिक 4WD SUV चे अनेक महत्त्वपूर्ण तोटे देखील आहेत. मुख्य म्हणजे, विचित्रपणे पुरेसे, हार्ड ऑल-व्हील ड्राइव्ह आहे. गोष्ट अशी आहे की टॉर्क कारच्या एक्सलमध्ये समान प्रमाणात वितरीत केला जातो. काही परिस्थितींमध्ये, पुढच्या आणि मागील चाकांचा कोनीय वेग नेहमीच सारखा नसतो
आणि जर, सैल मातीवर वाहन चालवताना, चाक घसरून याची भरपाई केली जाते, तर कठोर आणि सपाट रस्त्याच्या पृष्ठभागावर वाहन चालवताना, ट्रान्समिशनमध्ये धोकादायक ओव्हरलोड्स होतील. उदाहरणार्थ, कॉर्नरिंग करताना, टायरच्या दाबांमधील फरकांमुळे किंवा असमान कोनीय वेगामुळे कार्डन सांधे, SUV च्या प्रसारणात उद्भवते टॉर्शनल कंपने, परिणामी यंत्रणा सहज अपयशी ठरतात.
हे होण्यापासून रोखण्यासाठी, ड्राईव्ह एक्सलपैकी एक, सामान्यत: समोरचा, 4WD ट्रांसमिशनमधून डिस्कनेक्ट होण्याची क्षमता आहे. जर तुम्ही ऑफ-रोड गाडी चालवत असाल आणि डांबरी रस्त्यावर जाण्याचा निर्णय घेतला असेल, तर तुम्ही रस्त्यावर गाडी चालवण्याआधी ड्राईव्हचा एक एक्सल काढून टाकला पाहिजे. यांत्रिक नुकसान कमी करण्यासाठी, 4WD SUV चे अनेक देशी आणि विदेशी मॉडेल्स विशेष कपलिंगसह सुसज्ज आहेत ज्याद्वारे पुढील चाके ट्रान्समिशनला जोडलेली आहेत.
काही मॉडेल्समध्ये व्हील क्लचची व्हॅक्यूम किंवा इलेक्ट्रोमॅग्नेटिक ड्राइव्ह असते. यावर आधारित, या प्रकारच्या कारला "पार्ट टाइम 4WD" म्हणतात. वाढलेला इंधनाचा वापर ही दुसरी गोष्ट आहे लक्षणीय कमतरताएसयूव्ही जड फ्रेम संरचना, कास्ट-लोह ब्रिज बीम आणि मोठे यांत्रिक नुकसान अशा वाहनांची वाढलेली इंधन भूक निर्धारित करतात.
4WD चे फायदे:
- क्रॉस-कंट्री क्षमता वाढली,
- डिझाइनची साधेपणा आणि विश्वासार्हता,
- कठोर डिझाइन.
4WD चे तोटे:
- उच्च इंधन वापर,
- वाढलेली वीज हानी,
- ड्राइव्ह अक्षांपैकी एक अक्षम करण्याची आवश्यकता,
- गुरुत्वाकर्षणाचे उच्च केंद्र (टीप करण्याची प्रवृत्ती).
कायमस्वरूपी चारचाकी ड्राइव्ह (पूर्ण वेळ) 4WD.
कालांतराने, एसयूव्हीच्या प्रगतीशील डिझाइनने 4WD कारच्या हलक्या मॉडेल्सना मार्ग देण्यास सुरुवात केली, ज्यात कमी थकबाकी नव्हती. ऑफ-रोड गुण. कालांतराने, कठोर फ्रेमची आवश्यकता नाहीशी झाली. आणि चाक निलंबन पूर्णपणे स्वतंत्र झाले. ट्रान्समिशनच्या डिझाइनमध्येही बदल झाले आहेत. 4WD ऑल-व्हील ड्राइव्ह कनेक्ट करण्यासाठी, कार पूर्णपणे थांबवणे, नंतर व्हील कपलिंग्ज कनेक्ट करणे आणि त्यानंतरच एक्सल लीव्हर हलविणे आवश्यक होते.
कायमस्वरूपी 4WD ऑल-व्हील ड्राइव्हची रचना या सर्व ऑपरेशन्स पूर्णपणे काढून टाकते, कारण टॉर्क दोन्ही एक्सलमध्ये प्रसारित केला जातो. ट्रान्समिशनमध्ये दुसर्या घटकाचा परिचय झाल्यामुळे हे शक्य झाले - केंद्र भिन्नता. केंद्र भिन्नता प्लॅनेटरी व्हील डिफरेंशियलच्या डिझाइनसारखे दिसते.
कमीत कमी प्रतिकारशक्तीच्या तत्त्वानुसार हे उपकरण एक्सलमध्ये टॉर्क वितरीत करण्यास सक्षम आहे. कारच्या पुढच्या एक्सलला हालचालींना जास्त प्रतिकार झाल्यास, टॉर्क आपोआप हस्तांतरित केला जातो मागील कणा. या ट्रान्समिशन लेआउटमुळे ड्राइव्ह एक्सलपैकी एक अक्षम करण्याची आवश्यकता पूर्णपणे काढून टाकणे शक्य झाले.
कायमस्वरूपी ऑल-व्हील ड्राईव्ह असलेली कार अधिक चाली बनली आहे आणि उच्च वेगाने कॉर्नरिंग करताना स्किडिंगला प्रतिरोधक बनली आहे. त्याच वेळी, ऑफ-रोड, पूर्णवेळ 4 डब्ल्यूडी ड्राइव्ह पूर्णपणे निरुपयोगी होईल, कारण जर एका एक्सलवरील चाके घसरली तर इतर गतिहीन राहतात, कारण सर्व टॉर्क स्लिपिंग व्हीलकडे जातो. या आव्हानाचा सामना करण्यासाठी, सेंटर डिफरेंशियल लॉक कंट्रोल देखील म्हणतात "डिफ-लॉक".
कारच्या मेक आणि मॉडेलवर अवलंबून, विभेदक लॉक यंत्रणा (डिफ-लॉक) मध्ये लीव्हर, व्हॅक्यूम किंवा इलेक्ट्रोमॅग्नेटिक ड्राइव्ह असू शकते. ऑल-व्हील ड्राइव्ह 4WD ट्रान्समिशनच्या या व्यवस्थेबद्दल धन्यवाद, मोनोकोक बॉडी असलेल्या हलक्या वाहनांवर आणि पॉवर युनिटची अनुदैर्ध्य आणि ट्रान्सव्हर्स व्यवस्था दोन्हीवर स्थापित करणे शक्य झाले. अनुदैर्ध्य इंजिन असलेल्या कारमध्ये ट्रान्समिशन लेआउट असतो जो "क्लासिक" एसयूव्ही सारखाच असतो.
ट्रान्सव्हर्स मोटर लेआउटसह डिझाइन अधिक मनोरंजक आहे. सामान्यतः, गिअरबॉक्स, ट्रान्सफर केस आणि फ्रंट एक्सलचे क्रॉस-एक्सल डिफरेंशियल एका युनिटमध्ये एकत्र केले जातात. मागील एक्सलसाठी ड्राइव्ह याप्रमाणे डिझाइन केले आहे कोनीय गिअरबॉक्स, ज्याच्या आत मध्य अंतराचे घटक स्थित आहेत. हे 4WD डिझाइन, जरी ते वाहन जड बनवते, परंतु समान प्रकारच्या ट्रान्समिशनच्या तुलनेत अधिक कॉम्पॅक्ट आहे.
परिणामी, 4WD वाहन जवळजवळ कोणत्याही पृष्ठभागावर तितकेच चांगले फिरू शकते. पूर्णवेळ 4WD डिझाइनने अनेक मॉडेल्सचा आधार बनवला हायब्रिड एसयूव्ही, क्रॉसओवर म्हणतात. "क्लासिक" च्या विपरीत, अनेक क्रॉसओवर मॉडेल्समध्ये लोड-बेअरिंग बॉडी स्ट्रक्चर आणि पूर्णपणे स्वतंत्र स्प्रिंग सस्पेंशन असते. त्याच वेळी, ते दाट शहरातील रहदारीमध्ये आणि पुढे जाण्यास सक्षम आहेत प्रकाश ऑफ-रोड. लॉक केलेल्या डिफरेंशियलसह (डिफ-लॉक ऑन) वाहन चालवण्याची मुख्य अट अशी आहे की 60 किमी/तास पेक्षा जास्त वेग वाढवण्याची आणि 2 तासांपेक्षा जास्त वेळ चालविण्याची शिफारस केलेली नाही.
त्याच वेळी, हार्ड डिफरेंशियल लॉकिंग आज तितकेच पुरातन बनले आहे अवलंबून निलंबन. सोबत केंद्र भिन्नताकिंवा त्याऐवजी, चिपचिपा कपलिंग (व्हिस्कस कपलिंग) वापरले जाते. त्याच्या ऑपरेशनचे सिद्धांत स्वयंचलित ट्रांसमिशनमध्ये टॉर्क कन्व्हर्टरसारखेच आहे. डिस्क्सच्या दरम्यान, ट्रान्समिशनशी कठोरपणे जोडलेले, एक विशेष द्रव आहे.
पुढच्या आणि मागील अक्षांच्या कोनीय गतीमध्ये थोडासा फरक असल्यास, द्रव डिस्कला एकमेकांच्या सापेक्ष घसरण्याची परवानगी देतो. जेव्हा एक धुरा घसरतो तेव्हा द्रव गरम होतो, परिणामी त्याची घनता झपाट्याने वाढते. परिणामी, टॉर्क द्रवपदार्थाद्वारे स्थिर अक्षावर प्रसारित केला जातो. व्हिस्कस कपलिंग तुम्हाला योग्य वेळी सेंटर डिफरेंशियल आपोआप लॉक करू देते. त्याचा गैरसोय म्हणजे जास्त गरम होण्याची प्रवृत्ती. म्हणून, 4WD वाहनांमध्ये चिकट कपलिंगसह दीर्घ काळासाठी गंभीर ऑफ-रोड परिस्थितीवर मात करण्याची शिफारस केलेली नाही.
आधुनिक 4WD वाहने अधिक प्रगत लॉकिंग उपकरणांसह सुसज्ज आहेत. त्यांच्यामध्ये, व्हिस्कस क्लचची जागा मल्टी-डिस्क क्लचने घेतली आहे घर्षण क्लच, क्लचच्या तत्त्वावर कार्य करणे. क्लच इलेक्ट्रॉनिक पद्धतीने नियंत्रित केला जातो. इलेक्ट्रॉनिक उपकरणचाकांच्या कोनीय गतीचे निरीक्षण करते आणि स्थिर असलेल्यांना टॉर्क वितरीत करते. हार्ड लॉकिंगच्या विपरीत, ही यंत्रणा आपल्याला अधिक मोजलेल्या पद्धतीने टॉर्क वितरीत करण्यास अनुमती देते. इलेक्ट्रॉनिक नियंत्रणामुळे, 4WD कार निसरड्या रस्त्यांच्या पृष्ठभागावरही अधिक चालण्यायोग्य आणि स्थिर झाल्या आहेत.
4WD चे फायदे
- अष्टपैलुत्व,
- हालचाल होण्याची शक्यता,
- एखाद्या कठीण पृष्ठभागाप्रमाणे,
- आणि ऑफ रोड,
- चांगले हाताळणी.
4WD चे तोटे
- डिझाइनची जटिलता,
- ट्रान्समिशन भागांचे वजन वाढणे,
- वाढलेला इंधन वापर (हार्ड डिफरेंशियल लॉकसह पूर्णवेळ 4 WD साठी).
Peugeot वर CVT बद्दल सर्व टॉर्क आणि इंजिन पॉवर - काय फरक आहे? Peugeot साठी ड्राइव्ह - काढणे आणि स्थापना मोटर्स, इंजिनचे रेटिंग इंजिन nfu TU5JP4 1.6 l. प्यूजिओट
अलीकडेपर्यंत, जगभरातील खरेदीदारांच्या मोठ्या प्रमाणाने केवळ एका एक्सलवर चालणाऱ्या कारला प्राधान्य दिले होते, "4x4" श्रेणीचे वर्गीकरण केवळ ऑफ-रोड वाहन म्हणून केले जाते. आता हे दृश्य स्पष्टपणे जुने झाले आहे: ऑल-व्हील ड्राइव्ह सिस्टम आज गंभीरपणे विकसित झाल्या आहेत आणि इतर अनेक, कमी महत्त्वाची कार्ये करतात. तर, सर्व यंत्रणामोड 4x4-i बहुतेक निसान मॉडेल्ससाठी “कंपनी-व्यापी” बनला आहे. रशियन बाजारात ऑफर केलेल्या 14 ब्रँड वाहनांपैकी, दोन पिकअपसह, 10 ऑल-व्हील ड्राइव्हसह ऑफर केली जातात! X-Trail, Juke, Qashqai, Pathfinder, Murano यांचे सारखेच प्रसारण आहे... याचा अर्थ असा नाही की कार सिस्टीमचे सर्व घटक समान आहेत - त्यांच्याकडे फक्त एक समान विचारधारा आहे. सर्व काही सोपे आहे असे दिसते: मागील-चाक ड्राइव्ह (उदाहरणार्थ, कश्काई किंवा एक्स-ट्रेलच्या बाबतीत) किंवा फ्रंट-व्हील ड्राइव्ह (गस्त) फक्त इलेक्ट्रोमॅग्नेटिक क्लचद्वारे आवश्यक असेल तेव्हाच कनेक्ट केले जावे. परंतु हे हिमनगाचे फक्त टोक आहे, ज्यामध्ये मोठ्या प्रमाणात विविध असतात इलेक्ट्रॉनिक प्रणालीचालक सहाय्य. चला या वस्तुस्थितीपासून सुरुवात करूया की ऑल मोड 4x4-i ट्रान्समिशन स्वतःच मागील पिढीचे समान नाव असलेली एक वैचारिक निरंतरता आहे, कदाचित "i" उपसर्ग शिवाय, जे खरं तर, आम्हाला सर्वकाही डॉट करायचे होते. पण प्रथम, एक संक्षिप्त ऐतिहासिक सहल.
ड्रिफ्टिंग करताना, आवश्यक टर्निंग त्रिज्या प्राप्त करण्यासाठी मागील एक्सलवरील टॉर्क वाढतो. स्किडिंग करताना, इच्छित वळण त्रिज्या प्राप्त करण्यासाठी मागील एक्सलवरील टॉर्क कमी केला जातो
पार्श्वभूमी
सर्वसाधारणपणे, दुसरा एक्सल स्वयंचलितपणे जोडण्याची कल्पना नवीन नाही: तिसऱ्या सहस्राब्दीच्या पहाटे, जवळजवळ सर्व ऑटोमेकर्स विविध प्रकारांच्या बाजूने क्लासिक आणि पूर्णपणे "यांत्रिक" ट्रान्समिशनपासून मुक्त होण्यासाठी सरसावले. स्वयंचलित प्रणाली. कशासाठी? मुख्य दोषांपैकी एक म्हणजे ऑल-व्हील ड्राइव्हच्या सतत ऑपरेशनमुळे इंधनाचा वापर वाढला (आम्ही कायमस्वरूपी पूर्ण-वेळ ऑल-व्हील ड्राइव्हबद्दल बोलत आहोत). येथे वाचकाला इरनक्लड प्रतिवाद असावा: पार्ट-टाइम सिस्टमसह स्विच करण्यायोग्य फ्रंट एक्सल असलेल्या एसयूव्हीचे काय? मी असा युक्तिवाद करत नाही की अशा समाधानामुळे खरोखरच इंधनाची बचत होते, परंतु कार आणखी एका फायद्यापासून वंचित होती - निसरड्या पृष्ठभागावर विश्वसनीय हाताळणी. अर्थात, तिसरा प्रकार खरोखरच ऑफ-रोड ट्रान्समिशन आहे - एक संकरित, जो अर्धवेळ आणि पूर्ण-वेळ (मित्सुबिशी पजेरो किंवा जीपच्या काही आवृत्त्यांप्रमाणे) फायदे एकत्र करतो. तडजोड यशस्वी आहे, परंतु येथे तोटे देखील आहेत, मुख्य म्हणजे ते महाग आणि अवजड आहे. कारवर जड आणि महाग ट्रान्समिशन स्थापित करणे, ज्यासाठी विशिष्ट ड्रायव्हर प्रशिक्षण आवश्यक आहे, आमच्या काळात अत्यंत मूर्खपणाचे आहे - कारची किंमत आणि त्याचे वजन आता कमीतकमी महत्त्वाच्या भूमिकांपासून दूर आहे. बरं, शेवटचा युक्तिवाद, जो, कदाचित, क्लासिक एसयूव्हीच्या युगाच्या लुप्त होण्यामध्ये निर्णायक ठरला: विक्रीच्या निकालांद्वारे स्पष्टपणे दर्शविल्याप्रमाणे, त्यांची मागणी थांबली. खरेदीदाराने स्वतःची निवड केली: ऑफ-रोड पायलटिंगची गुंतागुंत कोणालाही समजून घ्यायची नाही, कोणते लॉक सक्रिय करणे आवश्यक आहे आणि ते अजिबात बंद करणे आवश्यक आहे का याचा विचार करा. अर्थात, आजपर्यंत खऱ्या जीपर्स अस्तित्वात आहेत, परंतु त्यांचा वाटा इतका कमी आहे की निर्मात्यांना मूलत: एक-पीस, पॉवर-हँगरी आणि कालबाह्य उत्पादनांच्या उत्पादनास त्रास देण्यात काहीच अर्थ नाही.

मागील एक्सलवर 0 ते 50% पर्यंत स्वयंचलित टॉर्क वितरण

मोड सक्तीने अवरोधित करणे 4WD लॉक
सिद्धांत
विचारसरणी क्रमवारी लावली गेली आहे असे दिसते: आधुनिक क्रॉसओवरमध्ये इंधनाचा वापर कमी असावा, कोणत्याही रस्त्याच्या परिस्थितीत आरामदायी आणि वाहन चालविणे सोपे असावे. उच्चस्तरीयसुरक्षितता आणि, शिवाय, त्याच्या उद्देशाचे औचित्य सिद्ध करा, म्हणजे, खडबडीत भूभागावर जाण्यास सक्षम व्हा. निसानचा सर्व मोड या सर्व पॅरामीटर्सची पूर्तता करतो याचा अंदाज लावणे कठीण नाही. त्याला काय आवडते? नवीन एक्स-ट्रेलचे उदाहरण पाहू. आधीच नमूद केल्याप्रमाणे, सर्व मोड 4x4-i हा विकासाचा पुढील टप्पा आहे मागील पिढीऑल-व्हील ड्राइव्ह ट्रान्समिशन. पारंपारिकपणे, सिस्टमला अनेक घटकांमध्ये विभागले जाऊ शकते: एक ट्रान्सफर केस (मूलत: एक गिअरबॉक्स जो फ्रंट एक्सल डिफरेंशियल आणि मागील चाकांसाठी पॉवर टेक-ऑफ गिअरबॉक्स एकत्र करतो), एक मागील गिअरबॉक्स, त्याच्या शरीरावर बसवलेला इलेक्ट्रोमॅग्नेटिक क्लच आणि एक नियंत्रण इलेक्ट्रॉनिक्सचा समूह. अशी प्रणाली आज कॉम्पॅक्टनेस आणि कार्यक्षमतेच्या दृष्टीने इष्टतम आहे. ऑटोमॅटिक मोडमध्ये, गिअरबॉक्समधील टॉर्क डीफॉल्टनुसार फक्त पुढच्या चाकांवर प्रसारित केला जातो, तर ड्राईव्हशाफ्ट निष्क्रियपणे फिरते, योग्य वेळी टॉर्क परत हस्तांतरित करण्यासाठी क्लच बंद होण्याची “प्रतीक्षा करत”. कपलिंग स्थान थेट चालू मागील कणायोगायोगाने नाही. प्रथम, हे एक्सल दरम्यान वाहनाच्या वजनाचे चांगले वितरण प्राप्त करते; दुसरे म्हणजे, आधीच व्यस्त पुढचा भाग गोंधळलेला नाही; तिसरे म्हणजे, मागील गीअरबॉक्सचे सर्वात गुळगुळीत आणि वेगवान ऑपरेशन होते - हे प्रवासाच्या "सुरुवातीला" पुढच्या बाजूने करण्याचा प्रयत्न करण्यापेक्षा उच्च जडत्व शक्तीसह आधीच फिरणाऱ्या ड्राइव्हशाफ्टसह गिअरबॉक्सचे गीअर्स चालू करणे सोपे आहे. धुरा अशा प्रकारे अंमलात आणलेली ऑल-व्हील ड्राइव्ह "वास्तविक" ऑफ-रोड डिझाइनपेक्षा खूपच सोपी, हलकी आणि अधिक बहुमुखी आहे. इलेक्ट्रोमॅग्नेटिक क्लच कोणत्या प्रकरणांमध्ये बंद झाला पाहिजे हे शोधणे बाकी आहे आणि सर्व काही त्यावर अवलंबून आहे का? इथेच इलेक्ट्रॉनिक्सच्या रहस्यमय शक्तींचा उपयोग होतो.

वरील मुद्दे i
जरी, आपण ते पाहिल्यास, येथे काहीही रहस्यमय नाही: संपूर्ण प्रणाली तर्कशास्त्र आणि सामान्य ज्ञानाच्या कठोर नियमांची पूर्तता करते. ट्रान्समिशन मोडसह प्रारंभ करणे योग्य आहे: सिस्टमच्या मागील पिढीप्रमाणे, 2WD, ऑटो आणि लॉक मोड जतन केले गेले आहेत (फ्रंट-व्हील ड्राइव्ह, स्वयंचलित मोड, लॉक केलेले क्लच). सर्वसाधारणपणे, टॉर्क वितरणाचे तर्क समान राहते. स्वयंचलित मोडमध्ये, मागील चाके मुख्यतः जेव्हा पुढची चाके सरकतात तेव्हा कार्य करण्यास सुरवात करतात आणि 50% पर्यंत टॉर्क मागील बाजूस प्रसारित केला जाऊ शकतो. क्लच बंद होणे हे अनेक सेन्सर्सच्या ऑपरेशनवर अवलंबून असते - स्टीयरिंग व्हील रोटेशन, कोनीय वेग, प्रवेग, चाकाचा वेग... जरी मागील एक्सल ड्राइव्हमधील क्लच लॉक मोड चालू करून कडकपणे लॉक केला जाऊ शकतो. परंतु येथे हे लक्षात ठेवण्यासारखे आहे की लॉक केलेले "केंद्र" (मूलत: एक केंद्र भिन्नता) सह हालचाल केवळ निसरड्या पृष्ठभागावरच शक्य आहे - मागील आणि पुढच्या एक्सलची चाके एकाच वेगाने फिरतात, ज्यामुळे प्रसारण घटकांवर नकारात्मक परिणाम होऊ शकतो. म्हणूनच, ब्रेकडाउन टाळण्यासाठी, जेव्हा वाहन तीव्रतेने वेग वाढवते किंवा ड्रायव्हिंगचा वेग 40 किमी/ताशी पेक्षा जास्त असेल तेव्हा क्लच स्वयंचलितपणे ऑटो मोडवर स्विच होतो. पूर्वीप्रमाणे, ऑल-व्हील ड्राइव्ह सिस्टम सक्रियपणे सिस्टमसह सहकार्य करते डायनॅमिक स्थिरीकरणवाहन (ESP): नियंत्रण गमावल्यास (कार ड्रिफ्ट किंवा स्किड) सहाय्याव्यतिरिक्त, सिस्टम ऑफ-रोडला मदत करू शकते. हे सर्वात वैशिष्ट्यपूर्णपणे कर्ण निलंबनादरम्यान प्रकट होते, जेव्हा ESP स्लिपिंग चाकांना ब्रेक करते, स्थिर चाकांमध्ये टॉर्क हस्तांतरित करते. परंतु या इलेक्ट्रॉनिक सहाय्यकाची नेहमीच आवश्यकता नसते: निसरड्या भागांवर मात करण्यासाठी, जेव्हा जास्तीत जास्त इंजिन आउटपुट आवश्यक असेल तेव्हा सिस्टम बंद करण्याची शिफारस केली जाते.
पासून मुख्य फरक मागील पिढ्यासिस्टम्स - सह ट्रान्समिशनचा सक्रिय संवाद एकात्मिक प्रणालीव्यवस्थापन निसान चेसिसचेसिस नियंत्रण. या व्यतिरिक्त, रस्त्याच्या परिस्थितीवर अवलंबून, सिस्टम ऍक्सल दरम्यान आपोआप टॉर्क हस्तांतरित करू शकते, इलेक्ट्रॉनिक्स आपल्याला एका वळणावर किंवा सरळ रेषेत गॅस सोडताना इंजिन ब्रेकिंगसह ट्रॅकवर राहण्यास मदत करू शकते. तसेच, कॉर्नरिंग करताना दिलेला मार्ग राखण्यासाठी, सिस्टम प्रत्येक चाकाला लागू केलेल्या ब्रेकिंग फोर्सचे स्वतंत्रपणे नियमन करते, अंडरस्टीअर किंवा ओव्हरस्टीअरची भरपाई करते. शरीराच्या कंपनांना ओलसर करण्यासाठी एका प्रणालीद्वारे चित्राचा मुकुट बनविला गेला आहे: जर इलेक्ट्रॉनिक्सने कर्ण रॉकिंगचा विकास लक्षात घेतला, तर स्टर्नची कंपने लहान ब्रेकिंग आवेगाने काढून टाकली जाऊ शकतात.

सराव
प्रीमियर चाचणीच्या वेळी हिवाळ्यात मी आधुनिक ऑल-व्हील ड्राइव्ह प्रणालीशी परिचित झालो. नवीन निसानएक्स-ट्रेल. आम्ही आयोजकांना श्रद्धांजली वाहिली पाहिजे - हिवाळी चाचणी ड्राइव्हसाठी स्थान उत्तम प्रकारे निवडले गेले. आम्ही आमच्या विशालतेच्या एका आश्चर्यकारक कोपऱ्याबद्दल बोलत आहोत, कारेलिया, त्याचे अत्यंत वैविध्यपूर्ण रस्ते आणि त्यांची कमी वैविध्यपूर्ण अनुपस्थिती. रस्त्यांचे मुख्य आकर्षण, त्यांच्या गर्दीच्या अभावाव्यतिरिक्त, एक मनोरंजक कोटिंग आहे: अभिकर्मक फक्त येथे वापरले जातात प्रमुख शहरे, ज्याचा परिणाम म्हणून रस्ते बऱ्याचदा संकुचित बर्फाने किंवा बर्फाच्या समान थराने झाकलेले असतात. येथेच हे स्पष्ट होते की चांगले हिवाळ्यातील टायरआणि सक्षम ऑल-व्हील ड्राइव्ह उपयुक्त गोष्टी आहेत. कारबद्दल मला आश्चर्य वाटणारी पहिली गोष्ट म्हणजे तिची स्थिर आणि सुरक्षित वागणूक. जर मला कंपन डॅम्पिंग सिस्टमच्या उपस्थितीबद्दल आगाऊ सांगितले नसते, तर मी क्वचितच त्याकडे लक्ष दिले असते - ते इतके शांतपणे आणि बिनधास्तपणे कारच्या कर्ण रॉकिंगला ओलसर करते. ऑल मोड 4x4-i च्या कृती, चेसिस कंट्रोलसह जोडलेल्या, विशेषत: उघड्या बर्फावर स्पष्ट होत्या: तुम्ही योग्य वेगाने एका वळणावर जाता आणि तुम्हाला नक्की काय बाहेरून घेऊन जाईल हे माहित आहे... आणि जणू कोणीतरी खेचत आहे. अदृश्य धाग्यांसह निसान वळणाच्या आतील भागात परत. आश्चर्यकारक! एक्स-ट्रेलला वेगवान वाहून नेण्यासाठी, तुम्हाला प्रथम बंद करून खूप प्रयत्न करावे लागतील ईएसपी प्रणाली. फक्त दहा वर्षांपूर्वी, एक सामान्य वाहनचालक हे स्वप्नातही पाहू शकत नाही - अत्यंत अंदाज लावणारे वर्तन! सारांश, आम्ही सुरक्षितपणे म्हणू शकतो की विकसकांचे प्रयत्न व्यर्थ ठरले नाहीत - कार चालवणे खरोखर सोपे झाले आहे.