प्रशासक
18702
CAN बसच्या ऑपरेशनची तत्त्वे समजून घेण्यासाठी, आम्ही नेहमीप्रमाणे, परदेशी स्त्रोतांच्या सामग्रीवर आधारित या विषयावर अनेक लेख लिहिण्याचे/अनुवाद करण्याचा निर्णय घेतला.
यापैकी एक स्त्रोत, जो आम्हाला वाटला तसा, CAN बसची तत्त्वे अगदी योग्यरित्या स्पष्ट करतो, Igendi Engineering (http://canbasic.com) मधील शैक्षणिक उत्पादन कॅनबेसिकचे व्हिडिओ सादरीकरण होते.
नवीन CANBASIC उत्पादनाच्या सादरीकरणात आपले स्वागत आहे, CAN बसच्या कार्यासाठी समर्पित प्रशिक्षण प्रणाली (बोर्ड).
आम्ही CAN बस नेटवर्क तयार करण्याच्या मूलभूत गोष्टींपासून सुरुवात करू. आकृतीत प्रकाश व्यवस्था असलेली कार दाखवली आहे.

प्रत्येक बल्ब थेट काही स्विच किंवा ब्रेक पेडल संपर्काशी जोडलेले ठराविक वायरिंग दाखवले आहे.

आता CAN बस तंत्रज्ञान वापरून तत्सम कार्यक्षमता दर्शविली आहे. समोर आणि मागील लाइटिंग डिव्हाइसेस कंट्रोल मॉड्यूलशी जोडलेले आहेत. कंट्रोल मॉड्यूल समान बस वायरसह समांतर जोडलेले आहेत.

हे छोटे उदाहरण दाखवते की इलेक्ट्रिकल वायरिंगचे प्रमाण कमी होते. याव्यतिरिक्त, कंट्रोल मॉड्यूल जळलेले दिवे शोधू शकतात आणि ड्रायव्हरला त्याबद्दल माहिती देऊ शकतात.
दर्शविलेल्या दृश्यातील कारमध्ये चार नियंत्रण मॉड्यूल आहेत आणि कॅनबॅसिक प्रशिक्षण प्रणाली (बोर्ड) चे बांधकाम स्पष्टपणे प्रतिबिंबित करते

वरील चार बस नोड (CAN नोड्स) आहेत.
फ्रंट मॉड्यूल समोरील दिवे नियंत्रित करते.
अलार्म युनिट वाहनाच्या आतील भागावर नियंत्रण प्रदान करते.
मुख्य नियंत्रण मॉड्यूल डायग्नोस्टिक्ससाठी सर्व वाहन प्रणालींना जोडते.
मागील असेंब्ली मागील दिवे नियंत्रित करते.
कॅनबॅसिक ट्रेनिंग बोर्डवर तुम्ही तीन सिग्नल्सचे रूटिंग (स्थान) पाहू शकता: “पॉवर”, “कॅन-हाय” आणि “ग्राउंड”, कंट्रोल मॉड्यूलमध्ये कनेक्ट होत आहे.

बहुतेक वाहनांमध्ये, निदान सॉफ्टवेअर वापरून मुख्य नियंत्रण मॉड्यूल पीसीशी कनेक्ट करण्यासाठी तुम्हाला OBD-USB कनवर्टर आवश्यक आहे.

CANBASIC बोर्डमध्ये आधीपासूनच OBD-USB कनवर्टर आहे आणि ते थेट PC शी कनेक्ट केले जाऊ शकते.
बोर्ड USB इंटरफेसद्वारे समर्थित आहे, त्यामुळे कोणत्याही अतिरिक्त केबल्सची आवश्यकता नाही.

विविध डेटा प्रसारित करण्यासाठी बस वायरचा वापर केला जातो. हे कसे कार्य करते?
CAN बस कशी काम करते?
हा डेटा अनुक्रमे प्रसारित केला जातो. येथे एक उदाहरण आहे.
दिवा, ट्रान्समीटर असलेल्या माणसाला दुर्बीण, रिसीव्हर (रिसीव्हर) असलेल्या माणसाला काही माहिती पाठवायची असते. त्याला डेटा ट्रान्सफर करायचा आहे.

हे करण्यासाठी, त्यांनी मान्य केले की प्राप्तकर्ता प्रत्येक 10 सेकंदांनी दिव्याची स्थिती तपासेल.

हे असे दिसते:



80 सेकंदांनंतर:

आता 0.1 बिट प्रति सेकंद (म्हणजे प्रत्येक 10 सेकंदाला 1 बिट) या वेगाने 8 बिट डेटा हस्तांतरित केला गेला आहे. याला सीरियल डेटा ट्रान्समिशन म्हणतात.

ऑटोमोटिव्ह ऍप्लिकेशनमध्ये हा दृष्टिकोन वापरण्यासाठी, वेळ मध्यांतर 10 सेकंदांवरून 0.000006 सेकंदांपर्यंत कमी केला जातो. डेटा बसवरील व्होल्टेज पातळी बदलून माहिती प्रसारित करण्यासाठी.

CAN बसचे इलेक्ट्रिकल सिग्नल मोजण्यासाठी ऑसिलोस्कोपचा वापर केला जातो. CANBASIC बोर्डवरील दोन मोजण्याचे पॅड तुम्हाला हा सिग्नल मोजण्याची परवानगी देतात.

संपूर्ण CAN संदेश दर्शविण्यासाठी, ऑसिलोस्कोप रिझोल्यूशन कमी केले आहे.

परिणामी, एकल CAN बिट्स यापुढे ओळखले जाऊ शकत नाहीत. या समस्येचे निराकरण करण्यासाठी, CANBASIC मॉड्यूल डिजिटल स्टोरेज ऑसिलोस्कोपसह सुसज्ज आहे.
आम्ही CANBASIC मॉड्यूल विनामूल्य USB कनेक्टरमध्ये समाविष्ट करतो, त्यानंतर ते स्वयंचलितपणे आढळले जाईल. CANBASIC सॉफ्टवेअर लगेच सुरू केले जाऊ शकते.
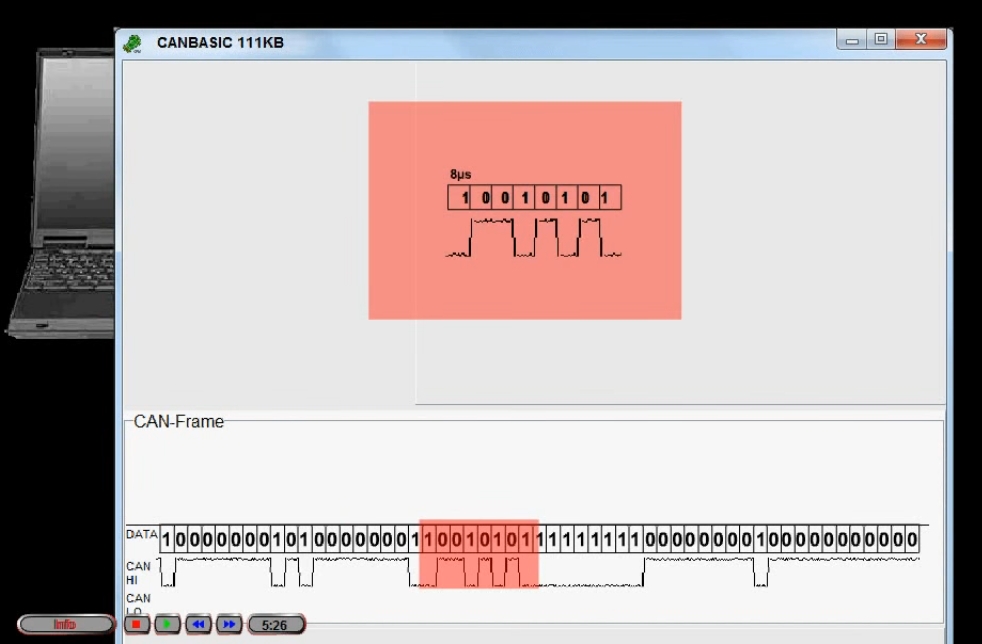
आपण संलग्न केलेल्या बिट मूल्यांसह सॉफ्टवेअर ऑसिलोस्कोप दृश्य पाहू शकता. लाल मागील उदाहरणामध्ये हस्तांतरित केलेला डेटा दर्शवितो.
CAN संदेशाचे इतर भाग स्पष्ट करण्यासाठी, आम्ही CAN फ्रेमला रंग देतो आणि त्यात वर्णन जोडतो.

CAN संदेशाचा प्रत्येक रंगीत भाग समान रंगाच्या इनपुट फील्डशी संबंधित असतो. लाल रंगात चिन्हांकित केलेल्या क्षेत्रामध्ये वापरकर्ता डेटा माहिती असते, जी बिट्स, निबल्स किंवा हेक्साडेसिमल फॉरमॅटमध्ये निर्दिष्ट केली जाऊ शकते.
पिवळा क्षेत्र वापरकर्ता डेटाचे प्रमाण निर्धारित करते. ग्रीन झोनमध्ये एक युनिक आयडेंटिफायर सेट केला जाऊ शकतो.
निळा क्षेत्र तुम्हाला रिमोट विनंतीसाठी CAN संदेश सेट करण्याची परवानगी देतो. याचा अर्थ दुसऱ्या CAN नोडकडून प्रतिसाद अपेक्षित असेल. (सिस्टम डेव्हलपर्स स्वतः रिमोट विनंत्या न वापरण्याची शिफारस करतात ज्यामुळे सिस्टीममध्ये त्रुटी येतात, परंतु त्याबद्दल दुसऱ्या लेखात चर्चा केली जाईल.)
अनेक CAN बस प्रणाली डेटा ट्रान्समिशनसाठी दुसऱ्या CAN-LO चॅनेलच्या हस्तक्षेपापासून संरक्षित आहेत, जे CAN-HI सिग्नलच्या सापेक्ष उलटे आहे (म्हणजेच, फक्त विरुद्ध चिन्हासह समान सिग्नल पाठविला जातो).

समान पातळीसह सलग सहा बिट्स CAN फ्रेमचा शेवट परिभाषित करतात.

योगायोगाने, CAN फ्रेमच्या इतर भागांमध्ये समान पातळीसह सलग पाचपेक्षा जास्त बिट असू शकतात.

हे बिट चिन्ह टाळण्यासाठी, समान पातळीचे सलग पाच बिट्स दिसल्यास, CAN फ्रेमच्या शेवटी विरुद्ध बिट घातला जातो. या बिट्सला स्टाफ बिट्स (कचरा बिट) म्हणतात. कॅन रिसीव्हर्स (सिग्नल रिसीव्हर्स) या बिट्सकडे दुर्लक्ष करतात.

इनपुट फील्ड वापरून, CAN फ्रेमचा सर्व डेटा निर्दिष्ट केला जाऊ शकतो आणि म्हणून प्रत्येक CAN संदेश पाठविला जाऊ शकतो.
समाविष्ट केलेला डेटा CAN फ्रेममध्ये त्वरित अद्यतनित केला जातो, या उदाहरणात डेटाची लांबी एका बाइटवरून 8 बाइट्समध्ये बदलली जाईल आणि एका बाइटने परत हलवली जाईल.

वर्णन मजकूर सूचित करतो की टर्न सिग्नल आयडी "2C1" आणि डेटा बिट 0 आणि 1 वापरून नियंत्रित केला जाईल. सर्व डेटा बिट 0 वर रीसेट केले आहेत.

आयडेंटिफायर ""2С1" मूल्यावर सेट केले आहे. टर्न सिग्नल सक्रिय करण्यासाठी, डेटा बिट 0 ते 1 पर्यंत सेट करणे आवश्यक आहे.

इंटीरियर मोडमध्ये, आपण साध्या माउस क्लिकसह संपूर्ण मॉड्यूल नियंत्रित करू शकता. इच्छित कृतीनुसार CAN डेटा स्वयंचलितपणे सेट केला जातो.
DRL म्हणून कार्य करण्यासाठी टर्न सिग्नल दिवे कमी बीमवर सेट केले जाऊ शकतात. आधुनिक डायोड तंत्रज्ञानाच्या क्षमतेनुसार पल्स विड्थ मॉड्युलेशन (PWM) द्वारे ब्राइटनेस नियंत्रित केला जाईल.
आता आपण लो बीम हेडलाइट्स, फॉग लाइट्स, ब्रेक लाईट्स आणि हाय बीम लाईट्स सक्रिय करू शकतो.

लो बीम बंद केल्यावर, फॉग लाइट देखील बंद केले जातात. कॅनबॅसिक लाइटिंग सिस्टमचे नियंत्रण तर्क फॉक्सवॅगन वाहनांशी संबंधित आहे. इग्निशन आणि "घर परत" वैशिष्ट्ये देखील समाविष्ट आहेत.
सिग्नल नोडसह, रिमोट विनंती सुरू केल्यानंतर तुम्ही सेन्सर सिग्नल वाचू शकता.
रिमोट रिक्वेस्ट मोडमध्ये, दुसरी CAN फ्रेम प्राप्त होईल आणि पाठवलेल्या CAN फ्रेमच्या खाली दर्शविली जाईल.

CAN डेटा बाइटमध्ये आता सेन्सर मापन परिणाम समाविष्ट आहे. तुम्ही तुमचे बोट सेन्सरच्या जवळ जाताच, तुम्ही मोजलेले मूल्य बदलू शकता.

पॉज की वर्तमान CAN फ्रेम गोठवते आणि अचूक विश्लेषणास अनुमती देते.
आधीच दर्शविल्याप्रमाणे, CAN फ्रेमचे विविध भाग लपवले जाऊ शकतात.

याव्यतिरिक्त, CAN फ्रेममध्ये प्रत्येक बिट लपविणे समर्थित आहे.
जर तुम्हाला तुमच्या स्वतःच्या कागदपत्रांमध्ये CAN फ्रेमचे प्रतिनिधित्व वापरायचे असेल, जसे की व्यायाम पत्रक.
निदान आणि दुरुस्ती: CAN बस
21.02.2006
हे "टायर" सारखे दिसते (बहुतेक)कॅन ", ज्याचा आम्हाला अलीकडे अधिकाधिक सामना करावा लागतो:
फोटो 1
ही एक सामान्य दोन-वायर केबल आहे ज्याला ट्विस्टेड पेअर म्हणतात .
फोटो 1 पॉवर युनिटच्या कॅन हाय आणि कॅन लो वायर दाखवतो.
या वायर्सचा उपयोग कंट्रोल युनिट्समधील डेटाची देवाणघेवाण करण्यासाठी केला जातो; ते वाहनाचा वेग, क्रँकशाफ्ट रोटेशन वेग, इग्निशन टाइमिंग इत्यादींबद्दल माहिती घेऊन जाऊ शकतात.
कृपया लक्षात घ्या की तारांपैकी एक अतिरिक्त काळ्या पट्ट्यासह चिन्हांकित आहे. अशा प्रकारे वायर चिन्हांकित आणि दृश्यमानपणे ओळखली जातेकॅन उच्च (केशरी-काळा).
वायर रंगकॅन-कमी - नारिंगी-तपकिरी.
टायरच्या मुख्य रंगासाठीकॅन केशरी रंग स्वीकारला जातो.
चित्रे आणि रेखाचित्रांमध्ये बसच्या तारांचे रंग चित्रित करण्याची प्रथा आहेकॅन इतर रंग, म्हणजे:

फोटो २
कॅन-उच्च - पिवळा
कॅन-कमी - हिरवा
टायरचे अनेक प्रकार आहेतकॅन , ते करत असलेल्या कार्यांद्वारे निर्धारित केले जाते:
पॉवरट्रेन कॅन बस(जलद चॅनेल) .
ती परवानगी देते 500 kbit/s च्या वेगाने माहिती प्रसारित करते आणि नियंत्रण युनिट्समधील संवादासाठी वापरली जाते (इंजिन - ट्रान्समिशन)
आरामदायी कॅन बस(मंद चॅनेल) .
ती परवानगी देते 100 kbit/s च्या वेगाने माहिती प्रसारित करा आणि कम्फर्ट सिस्टममध्ये समाविष्ट असलेल्या कंट्रोल युनिट्समधील संवादासाठी वापरली जाते.
माहिती आणि आदेश प्रणाली CAN डेटा बस(स्लो चॅनेल), 100 kBit/s वेगाने डेटा ट्रान्समिशनला अनुमती देते. संवाद प्रदान करतेविविध सेवा प्रणालींमध्ये (उदाहरणार्थ, टेलिफोन आणि नेव्हिगेशन सिस्टम).
सुरक्षा, आराम आणि पर्यावरण मित्रत्वासाठी घोषित कार्यांच्या संख्येच्या बाबतीत - नवीन कार मॉडेल्स अधिकाधिक विमानांसारखे होत आहेत. तेथे अधिकाधिक नियंत्रण युनिट्स आहेत आणि तारांच्या प्रत्येक गुच्छातून "खेचणे" अवास्तव आहे.
म्हणून, टायर व्यतिरिक्तकॅन आधीच नावाचे इतर टायर आहेत:
- लिन बस (सिंगल-वायर बस)
- सर्वाधिक बस (फायबर ऑप्टिक बस)
- ब्लूटूथ वायरलेस बस
परंतु आपण "आपले विचार झाडाखाली पसरवू नका," आता आपले लक्ष एका विशिष्ट टायरवर केंद्रित करूया:कॅन (महामंडळाच्या मतानुसारबॉश).
उदाहरण म्हणून CAN बस वापरणे पॉवर युनिट, आपण सिग्नल आकार पाहू शकता:

फोटो 3
हाय CAN बसवर असताना प्रबळ स्थिती, वायरवरील व्होल्टेज 3.5 व्होल्टपर्यंत वाढते.
रेक्सेटिव्ह अवस्थेत, दोन्ही तारांवरील व्होल्टेज 2.5 व्होल्ट आहे.
लाईनवर असतानाकमी प्रबळ स्थिती, व्होल्टेज 1.5 व्होल्टपर्यंत खाली येते.
(“प्रबळ” ही एक घटना आहे जी कोणत्याही क्षेत्रात वर्चस्व गाजवते, वर्चस्व गाजवते किंवा वर्चस्व गाजवते, शब्दकोषांमधून).
डेटा ट्रान्समिशनची विश्वासार्हता वाढवण्यासाठी, बसकॅन दोन तारांवर सिग्नल प्रसारित करण्याची एक विभेदक पद्धत म्हणतातट्विस्टेड जोडी . आणि ही जोडी तयार करणाऱ्या तारांना म्हणतात CAN उच्च आणि CAN कमी .
बसच्या सुरुवातीच्या स्थितीत, एका विशिष्ट (बेस) स्तरावर दोन्ही तारांवर स्थिर व्होल्टेज राखले जाते. बससाठीकॅन पॉवर युनिट ते अंदाजे 2.5 व्होल्ट आहे.
या प्रारंभिक अवस्थेला "विश्रांती अवस्था" किंवा "विश्रांती अवस्था" असे म्हणतात.
सिग्नल कसे प्रसारित आणि रूपांतरित केले जातात?बस जाऊ शकते का?
प्रत्येक कंट्रोल युनिटला जोडलेले आहेकॅन ट्रान्सीव्हर नावाच्या वेगळ्या उपकरणाद्वारे बस, ज्यामध्ये सिग्नल रिसीव्हर आहे, जो सिग्नल इनपुटवर स्थापित केलेला एक विभेदक ॲम्प्लीफायर आहे:

फोटो ४
वायरने येत आहेउच्च आणि निम्न सिग्नल डिफरेंशियल एम्पलीफायरमध्ये प्रवेश करतात, त्यावर प्रक्रिया केली जाते आणि नियंत्रण युनिटच्या इनपुटवर पाठविली जाते.
हे सिग्नल डिफरेंशियल ॲम्प्लिफायरच्या आउटपुटवर व्होल्टेजचे प्रतिनिधित्व करतात.
डिफरेंशियल ॲम्प्लिफायर हा आउटपुट व्होल्टेज CAN बसच्या उच्च आणि निम्न तारांवरील व्होल्टेजमधील फरक म्हणून निर्माण करतो.
हे बेस व्होल्टेजचा प्रभाव दूर करते (पॉवर युनिटच्या CAN बससाठी ते 2.5 V आहे) किंवा कोणत्याही व्होल्टेजमुळे, उदाहरणार्थ, बाह्य आवाजामुळे.
तसे, हस्तक्षेप बद्दल. जसे ते म्हणतात, "टायरकॅन हे हस्तक्षेपास जोरदार प्रतिरोधक आहे, म्हणूनच ते मोठ्या प्रमाणावर वापरले जाते."
चला हे शोधण्याचा प्रयत्न करूया.
CAN बस वायर पॉवर युनिट इंजिनच्या डब्यात स्थित आहे आणि विविध प्रकारच्या हस्तक्षेपामुळे प्रभावित होऊ शकते, उदाहरणार्थ, इग्निशन सिस्टममधील हस्तक्षेप.
CAN बस असल्याने दोन वायर्स असतात ज्या एकत्र वळवल्या जातात, नंतर हस्तक्षेप एकाच वेळी दोन तारांवर परिणाम करतो:

वरील आकृतीवरून तुम्ही पुढे काय होते ते पाहू शकता: विभेदक ॲम्प्लिफायरमध्ये, लो वायरवरील व्होल्टेज (1.5 V - "पृ ") व्होल्टेजमधून वजा केले जाते
उच्च वायरवर (3.5 V - "पृ ") आणि प्रक्रिया केलेल्या सिग्नलमध्ये कोणताही हस्तक्षेप नाही ("पीपी" - हस्तक्षेप).

टीप: वेळेच्या उपलब्धतेनुसार, लेख चालू ठेवला जाऊ शकतो - बरेच काही "पडद्यामागे" राहते.
कुचेर व्ही.पी.
© Legion-Avtodata
तुम्हाला यामध्ये देखील स्वारस्य असू शकते:
CAN बस म्हणजे काय?
CAN चा इतिहास गेल्या शतकाच्या 80 च्या दशकाच्या मध्यात सुरू झाला. बॉश, इंटेलसह, डेटा ट्रान्सफरसाठी एक नवीन डिजिटल इंटरफेस विकसित केला आहे - कंट्रोलर एरिया नेटवर्क (CAN).

ॲनालॉग अलार्म कनेक्शन (CAN बसशिवाय)
तुम्हाला कारमध्ये कॅन बसची गरज का आहे?
CAN बस तुम्हाला कारमध्ये असलेले कितीही सेन्सर, कंट्रोलर्स, ॲक्ट्युएटर आणि इतर युनिट्स (उदाहरणार्थ: ABS, SRS AIRBAG, ESP सिस्टीम, इमोबिलायझर, इंजिन कंट्रोल युनिट, हवामान, गिअरबॉक्स, सेंट्रल लॉकिंग, लाईट, सस्पेंशन) कनेक्ट करण्याची परवानगी देते. , इन्स्ट्रुमेंट पॅनेल, इ...) डुप्लेक्स मोडमध्ये (डेटा रिसेप्शन आणि ट्रान्समिशन) 1 Mbit/s पर्यंत वेगाने. त्याच वेळी, कॅन बसमध्ये फक्त दोन वायर असतात (ट्विस्टेड जोडी). पूर्वी, ब्लॉक्स जोडण्यासाठी शेकडो वायर वापरावे लागायचे कारण... माहितीच्या युनिटचे ब्लॉक ते ब्लॉकमध्ये प्रसारण एका वेगळ्या वायरद्वारे केले गेले.

CAN बसद्वारे अलार्मची स्थापना
CAN मॉड्यूलसह कार अलार्म.

कॅन मॉड्यूल
आधुनिक कार अलार्म एकात्मिक CAN मॉड्यूलसह तयार केले जातात, जे तुम्हाला कार अलार्मला थेट कारच्या डिजिटल CAN बसशी जोडण्याची परवानगी देतात. कार अलार्मला मर्यादा स्विच, लॉक, इग्निशन, हँडब्रेक, टॅकोमीटर इ.च्या स्थितीबद्दल डिजिटल माहिती प्राप्त होते. आणि दरवाजाचे कुलूप, पॉवर खिडक्या, सनरूफ, मानक अलार्म आणि काही इतर वाहन प्रणाली देखील नियंत्रित करू शकतात. आपल्याला मानक इलेक्ट्रिकल वायरिंगमधील हस्तक्षेप लक्षणीयरीत्या कमी करण्यास अनुमती देते (कन बस न वापरता आवृत्तीमध्ये 15-20 ऐवजी फक्त 6-8 तारांवर कनेक्शन केले जाते) आणि कारच्या इलेक्ट्रिकल उपकरणावरील वॉरंटीसह समस्या टाळते.
आधुनिक कार हे केवळ वाहतुकीचे साधनच नाही तर मल्टीमीडिया फंक्शन्ससह एक प्रगत गॅझेट आणि युनिट्ससाठी इलेक्ट्रॉनिक नियंत्रण प्रणाली आणि सेन्सर्सचा समूह देखील आहे. अनेक ऑटोमेकर्स ट्रॅफिक सहाय्यक, पार्किंग सहाय्यक, फोनवरून कारचे निरीक्षण आणि नियंत्रण करण्याची कार्ये देतात. सर्व सिस्टीम कनेक्ट केलेल्या कारमध्ये कॅन बस वापरल्याबद्दल हे शक्य आहे: इंजिन, ब्रेक सिस्टम, स्टीयरिंग व्हील, मल्टीमीडिया, हवामान इ.
माझी कार Skoda Octavia 2011 आहे. फोनवरून नियंत्रण क्षमता प्रदान करत नाही, म्हणून मी ही कमतरता दूर करण्याचा निर्णय घेतला आणि त्याच वेळी व्हॉइस कंट्रोल फंक्शन जोडले. CAN बस आणि फोन मधील प्रवेशद्वार म्हणून, मी CAN BUS शील्ड आणि TP-Link WiFi राउटरसह Raspberry Pi वापरतो. कार युनिट्समधील संप्रेषण प्रोटोकॉल बंद आहे आणि फोक्सवॅगनने माझ्या सर्व पत्रांना प्रोटोकॉल दस्तऐवजीकरण प्रदान करण्यास नकार दिला. म्हणून, कारमधील उपकरणे कशी संवाद साधतात आणि त्यांचे नियंत्रण कसे करावे हे जाणून घेण्याचा एकमेव मार्ग म्हणजे VW CAN बस प्रोटोकॉलला रिव्हर्स इंजिनियर करणे.
मी टप्प्याटप्प्याने कार्य केले:
- कारच्या CAN बसला जोडत आहे
- होमकिट आणि सिरी सह व्हॉइस कंट्रोल
रास्पबेरी पाईसाठी CAN शील्डचा विकास
मी येथे lnxpps.de/rpie शील्ड सर्किट घेतले, तेथे पिनचे वर्णन देखील आहे, CAN शी संवाद साधण्यासाठी 2 microcircuits MCP2515 आणि MCP2551 वापरले जातात. 2 वायर CAN-High आणि CAN-Low शील्डला जोडलेले आहेत. मी SprintLayout 6 मध्ये बोर्ड घातला, कदाचित कोणाला CANBoardRPi.lay उपयुक्त वाटेल (शीर्षक फोटोमध्ये ब्रेडबोर्डवरील ढालचा नमुना आहे).

CAN बस सह कार्य करण्यासाठी सॉफ्टवेअर स्थापित करणे
Raspbian वर 2 वर्षांपूर्वी मला CAN समर्थन जोडण्यासाठी bcm2708.c पॅच करणे आवश्यक होते (कदाचित हे आता आवश्यक नाही). CAN बससोबत काम करण्यासाठी, तुम्हाला github.com/linux-can/can-utils वरून can-utils युटिलिटी पॅकेज स्थापित करावे लागेल, नंतर मॉड्यूल लोड करा आणि कॅन इंटरफेस वाढवा:# आरंभ करा insmod spi-bcm2708 insmod can insmod can-dev insmod can-raw insmod can-bcm insmod mcp251x # Maerklin Gleisbox (60112 आणि 60113) चाचणीसाठी 250000 # लूपबॅक मोड वापरते ip दुवा संच can00201 वर लूपबॅक मोड कॅन 020201 टाइप करू शकता.
आम्ही तपासतो की CAN इंटरफेस कमांडसह आहे ifconfig:

कमांड पाठवून आणि ती प्राप्त करून तुम्ही सर्वकाही कार्य करत असल्याचे तपासू शकता.
एका टर्मिनलमध्ये आम्ही ऐकतो:
रूट@raspberrypi ~ # candump any,0:0,#FFFFFFFF
दुसऱ्या टर्मिनलमध्ये आम्ही पाठवतो:
रूट@raspberrypi ~ # cansend can0 123 # deadbeef
lnxpps.de/rpie येथे अधिक तपशीलवार स्थापना प्रक्रियेचे वर्णन केले आहे.
कारच्या CAN बसला जोडत आहे
VW CAN बसवरील खुल्या कागदपत्रांचा थोडासा अभ्यास केल्यावर, मला कळले की मी 2 बस वापरतो.पॉवरट्रेन कॅन बस, 500 kbit/s च्या वेगाने डेटा प्रसारित करून, या युनिटला सेवा देणाऱ्या सर्व कंट्रोल युनिटला जोडते.
उदाहरणार्थ, खालील उपकरणे पॉवर युनिटच्या CAN बसशी जोडली जाऊ शकतात:
- इंजिन कंट्रोल युनिट,
- ABS कंट्रोल युनिट,
- विनिमय दर स्थिरीकरण प्रणालीसाठी नियंत्रण युनिट,
- गियरबॉक्स कंट्रोल युनिट,
- एअरबॅग कंट्रोल युनिट,
- इन्स्ट्रुमेंट क्लस्टर.
उदाहरणार्थ, कम्फर्ट सिस्टम आणि माहितीच्या कॅन बससाठी<командной системы могут быть
खालील उपकरणे जोडलेली आहेत:
- क्लायमॅट्रॉनिक सिस्टम किंवा एअर कंडिशनिंग सिस्टमसाठी कंट्रोल युनिट,
- कारच्या दारातील कंट्रोल युनिट्स,
- कम्फर्ट सिस्टम कंट्रोल युनिट,
- रेडिओ आणि नेव्हिगेशन सिस्टमसाठी प्रदर्शनासह नियंत्रण युनिट.
दोन्ही बसेस एका गेटवेद्वारे जोडलेल्या आहेत, जे स्टिअरिंग व्हीलच्या खाली असलेल्या भागात आहे, आणि डायग्नोस्टिक OBD2 कनेक्टर देखील गेटवेशी जोडलेला आहे. दुर्दैवाने, तुम्ही OBD2 कनेक्टरद्वारे दोन्ही बसेसमधील रहदारी ऐकू शकत नाही, तुम्ही फक्त पाठवू शकता आदेश द्या आणि स्थितीची विनंती करा. मी ठरवले की मी फक्त “कम्फर्ट” बससोबतच काम करेन आणि बसला जोडण्यासाठी सर्वात सोयीचे ठिकाण म्हणजे ड्रायव्हरच्या दारातील कनेक्टर.

आता मी Comfort CAN बसमध्ये घडणाऱ्या सर्व गोष्टी ऐकू शकतो आणि कमांड पाठवू शकतो.
स्निफरचा विकास आणि CAN बस प्रोटोकॉलचा अभ्यास

CAN बस ऐकण्यासाठी मला प्रवेश मिळाल्यानंतर, कोण कोणाला काय प्रसारित करत आहे हे मला उलगडणे आवश्यक आहे. CAN पॅकेट फॉरमॅट आकृतीमध्ये दर्शविले आहे.

कॅन-युटिल्स सेटमधील सर्व युटिलिटिज CAN पॅकेट्स स्वतः पार्स करू शकतात आणि फक्त उपयुक्त माहिती देऊ शकतात, म्हणजे:
- ओळखकर्ता
- डेटा लांबी
- डेटा
macOS साठी मी एक साधा अनुप्रयोग लिहिला आहे जो प्रत्येक डिव्हाइस पत्त्यासाठी टेबलमध्ये सेल जोडतो आणि या सेलमध्ये मी आधीच पाहू शकतो की कोणता डेटा बदलत आहे.

मी पॉवर विंडो बटण दाबले, मला एक सेल सापडला ज्यामध्ये डेटा बदलतो, त्यानंतर मी निर्धारित केले की कोणत्या कमांड्स खाली दाबणे, दाबणे, धरून ठेवणे, धरून ठेवणे याशी संबंधित आहे.
टर्मिनलवरून पाठवून कमांड कार्य करते हे तुम्ही तपासू शकता, उदाहरणार्थ, डावा काच वर करण्याची आज्ञा:
cansend can0 181#0200
रिव्हर्स इंजिनीअरिंग वापरून मिळविलेल्या VAG कार (स्कोडा ऑक्टाव्हिया 2011) मध्ये CAN बस द्वारे उपकरणे प्रसारित करणारे आदेश:
// समोर डावी काच वर 181#0200 // समोर डावीकडे काच खाली 181#0800 // समोर उजवीकडे काच वर 181#2000 // समोर उजवीकडे काच खाली 181#8000 // मागे डावीकडे काच वर 181#0800 // Back खाली 181#0008 // मागे उजवीकडे काच वर 181#0020 // मागे उजवीकडे काच खाली 181#0080 // सेंट्रल लॉक उघडा 291#09AA020000 // सेंट्रल लॉक बंद करा 291#0955040000 // आपण सेंट्रल स्थिती पाठवा कमांड लॉक उघडा/बंद करा, नंतर लॉक कंट्रोल बटणावरील एलईडी स्थिती बदलत नाही, जेणेकरून ते सेंट्रल लॉकची वास्तविक स्थिती दर्शवेल, तुम्हाला अपडेट कमांड पाठवावी लागेल) 291#0900000000
मी इतर सर्व उपकरणांचा अभ्यास करण्यास खूप आळशी होतो, म्हणून या सूचीमध्ये, फक्त माझ्यासाठी मनोरंजक होते.
फोन अनुप्रयोग विकास
मिळालेल्या आदेशांचा वापर करून, मी iPhone साठी एक ऍप्लिकेशन लिहिले जे विंडो उघडते/बंद करते आणि सेंट्रल लॉकिंग नियंत्रित करते.Raspberry Pi वर मी 2 छोटे सर्व्हर लाँच केले, पहिला कँडम्प वरून TCP/IP ला डेटा पाठवतो, दुसरा iPhone कडून कमांड प्राप्त करतो आणि कॅन्संडला पाठवतो.

iOS साठी कार नियंत्रण अनुप्रयोगाचे स्रोत
// // FirstViewController.m // कार नियंत्रण // // विटाली युर्किन यांनी 05/17/15 रोजी तयार केले. // कॉपीराइट (c) 2015 Vitaliy Yurkin. सर्व हक्क राखीव. // #import "FirstViewController.h" #import "DataConnection.h" #import "CommandConnection.h" @interface FirstViewController ()
फोनसाठी तुमचा स्वतःचा अर्ज न लिहिण्याचा एक मार्ग आहे, परंतु स्मार्ट घरांच्या जगातून तयार केलेला वापरण्यासाठी, तुम्हाला फक्त रास्पबेरी पाईवर ऑटोमेशन सिस्टम स्थापित करण्याची आवश्यकता आहे.
आधुनिक कार विविध प्रणालींसाठी इलेक्ट्रॉनिक नियंत्रण युनिट्ससह सुसज्ज आहे: इंजिन, अँटी-लॉक ब्रेक सिस्टम, शरीर आणि इतर. मूलत: ही युनिट्स मायक्रो कॉम्प्युटर आहेत.
कारमध्ये CAN बस काय आहे हे समजून घेण्यासाठी, कल्पना करा की कारमध्ये स्थानिक नेटवर्क आयोजित केले आहे, ज्याला हे मायक्रोकॉम्प्युटर जोडलेले आहेत - जेणेकरून ते एकत्र कार्य करतील.
हे कार्यालयीन संगणक नेटवर्कमध्ये कसे जोडलेले आहे यासारखेच आहे जेणेकरून कर्मचारी सहजपणे एकमेकांकडून माहिती घेऊ शकतात आणि बॉसला कार्यालयीन कर्मचाऱ्यांच्या कामावर त्वरित लक्ष ठेवण्याची संधी असते.
ऑन-बोर्ड कॉम्प्युटर आणि डायग्नोस्टिक सिस्टम कारमध्ये बॉस म्हणून काम करतात.
कंट्रोलर एरिया नेटवर्कच्या विकासाचा आणि एकीकरणाचा इतिहास
बॉश कंपनीने, गेल्या शतकाच्या 80 च्या दशकात ऑटोमेशन क्षेत्रात संशोधन करत असताना, ऑटोमोटिव्ह उद्योगात वापरले जाऊ शकणारे मायक्रोकंट्रोलर कम्युनिकेशन मानक प्रस्तावित केले.
CAN मानक कारपुरते मर्यादित नाही. सध्या, हे "स्मार्ट होम" संकल्पना, औद्योगिक ऑटोमेशन इत्यादींमध्ये वापरले जाते.
ऑटोमोटिव्ह तंत्रज्ञानावर लागू केल्याप्रमाणे, CAN (कंट्रोलर एरिया नेटवर्क) मानक भौतिक स्तर असलेल्या बसमध्ये स्वीकारले जाते. हे कंडक्टरच्या वळणाच्या जोडीचा वापर करून आयोजित केले जाते, ज्यासह वेगवेगळ्या ध्रुवीयतेच्या सिग्नलचे पॅकेट प्रवास करतात.
या मानकाला आंतरराष्ट्रीय वर्गीकरण ISO 11898 प्राप्त झाले आहे. फ्रेम (पॅकेट) मध्ये 11-बिट माहिती सिग्नल (किंवा विस्तारित मोडमध्ये 29-बिट) समाविष्ट आहे.
सर्वसाधारणपणे, CAN बस वळणा-या जोड्यांच्या तारांचा वापर करून कार्यान्वित केली जाऊ शकत नाही. हे एकतर ऑप्टिकल फायबर किंवा रेडिओ चॅनेल असू शकते.
असे गृहित धरले जाऊ शकते की मानवरहित वाहनांच्या परिचयाने, CAN बस एकासाठी माहिती प्रसारित करण्यासाठी मोबाइल इंटरफेसमध्ये रूपांतरित होईल आणि शक्यतो कारच्या संकुलात.
कार कॅन बस: ती काय आहे आणि त्याचे ऑपरेटिंग तत्त्व
बस हे एक स्थानिक नेटवर्क आहे ज्याद्वारे विविध वाहन प्रणालींच्या नियंत्रण युनिट्समध्ये माहितीची देवाणघेवाण केली जाते. अशाप्रकारे, नियंत्रण युनिट, उदाहरणार्थ, कार इंजिनचे, मुख्य मायक्रोकंट्रोलर व्यतिरिक्त, इंजिनची सेवा करणाऱ्या, CAN कंट्रोलरची उपस्थिती गृहीत धरते, जे दोन बसेसमध्ये डाळी निर्माण करते: CAN-उच्च आणि CAN-लो (H आणि L) ).
हे सिग्नल ट्रान्सीव्हरद्वारे कंडक्टर (ट्विस्टेड जोडी) वर प्रसारित केले जातात. ट्रान्ससीव्हर्स, किंवा ट्रान्सीव्हर्स, यासाठी डिझाइन केले आहेत:
- सिग्नल प्रवर्धन,
- प्रसारित डाळींची आवाज प्रतिकारशक्ती सुनिश्चित करणे;
- डिजिटल प्रवाह प्रसारण गती समायोजित करणे;
- CAN बसचे नुकसान झाल्यास लाइन संरक्षण.
खालील प्रकारचे ट्रान्सीव्हर्स आता ऑटोमोटिव्ह तंत्रज्ञानामध्ये वापरले जातात - हाय स्पीड आणि फॉल्ट टोलरन. हाय स्पीड ट्रान्समीटर माहिती हस्तांतरणाची तुलनेने उच्च गती प्रदान करतो - 1 मेगाबिट प्रति सेकंद पर्यंत. दुसऱ्या प्रकारच्या ट्रान्समीटरमध्ये कमी माहिती हस्तांतरण गती असते - प्रति सेकंद 120 किलोबिट्स पर्यंत. परंतु ती CAN बसच्या गुणवत्तेसाठी कमी संवेदनशील (त्रुटी सहन करणारी) आहे आणि तिच्या पॅरामीटर्समध्ये विचलनांना अनुमती देते.
डेटा एक्सचेंज संस्था आकृती
CAN बसला विविध वाहन युनिट्स जोडण्याचे स्ट्रक्चरल आकृती खालीलप्रमाणे चित्रित केले जाऊ शकते:

सर्व उपकरणांचे समन्वय साधण्यासाठी, म्हणजे, इष्टतम परिस्थिती आणि रिसेप्शन आणि ट्रान्समिशनची गती आयोजित करण्यासाठी, ट्रान्समीटरचे आउटपुट प्रतिरोध अंदाजे समान असणे आवश्यक आहे.
वाहन प्रणालीचे कोणतेही नियंत्रण युनिट डिस्कनेक्ट किंवा खराब झाल्यास, बसचा प्रतिकार बदलतो, प्रतिकार जुळणी विस्कळीत होते, ज्यामुळे बससह माहिती हस्तांतरणाच्या गतीमध्ये लक्षणीय घट होते. अशा उल्लंघनांमुळे CAN बस द्वारे संप्रेषण पूर्णपणे नष्ट होऊ शकते.
काही वाहनांवर, CAN माहिती सिंक्रोनायझेशनमधील समस्या दूर करण्यासाठी वेगळे गेटवे मॉड्यूल वापरले जाते.

CAN बसवर प्रसारित केलेल्या प्रत्येक संदेशाचा स्वतःचा अभिज्ञापक असतो, उदाहरणार्थ "कूलंट तापमान" आणि त्याच्या मूल्याशी संबंधित कोड, जसे की "98.7 अंश सेल्सिअस". ही निरपेक्ष मूल्ये असतीलच असे नाही; बहुतेक प्रकरणांमध्ये ही सापेक्ष बायनरी युनिट्स असतील, जी पुढे नियंत्रण आणि निरीक्षण सिग्नलमध्ये रूपांतरित केली जातात.

हाच डेटा डायग्नोस्टिक साधनांद्वारे मुख्य वाहन प्रणालींबद्दल माहितीचे परीक्षण आणि प्रक्रिया करण्यासाठी वापरला जातो.
CAN बसचे मुख्य ऑपरेटिंग मोड:
- सक्रिय (इग्निशन चालू);
- झोपणे (इग्निशन बंद असताना);
- जागे होणे आणि झोपणे (इग्निशन चालू आणि बंद करताना).
स्लीप मोड दरम्यान, बसचा वर्तमान वापर कमीतकमी असतो. तथापि, त्याच वेळी, दरवाजे आणि खिडक्या उघडण्याच्या स्थितीबद्दल सिग्नल आणि कारच्या सुरक्षा कार्यांशी संबंधित इतर सिस्टम बसद्वारे (कमी वारंवारतेवर) प्रसारित केले जातात.
बहुतेक आधुनिक निदान उपकरणे CAN बसद्वारे त्रुटींचे निदान करण्यासाठी एक मोड प्रदान करतात. तांत्रिकदृष्ट्या, कंडक्टरला डायग्नोस्टिक कनेक्टरशी थेट जोडून हे आयोजित केले जाते.

कारमध्ये CAN बस वापरण्याचे फायदे आणि तोटे
सुरुवातीला, जर गेल्या शतकाच्या 80 च्या दशकात CAN मानक प्रस्तावित केले गेले नसते, तर वाहन प्रणालींमधील परस्परसंवादाचा दुसरा प्रकार झाला असता.
अर्थातच, सर्व वाहन प्रणाली नियंत्रण युनिट्स एकाच सुपरब्लॉकमध्ये ठेवणे शक्य आहे, ज्यामध्ये सॉफ्टवेअरद्वारे विविध प्रणालींचा परस्परसंवाद सुनिश्चित केला जाऊ शकतो. फ्रेंच उत्पादकांनी असेच प्रयत्न केले आहेत. तथापि, कार्यक्षमता आणि कार्यप्रदर्शन वाढल्यामुळे, अपयशाची शक्यता लक्षणीय वाढते. बिघाड, उदाहरणार्थ, वाइपर, इंजिन सुरू करण्यात अयशस्वी होऊ शकते.
कॅन बस वापरण्याचे मुख्य फायदे:
- ऑपरेशनल नियंत्रण आयोजित करण्याची शक्यता आणि;
- एकाच आवाज-प्रूफ चॅनेलमध्ये माहिती प्रवाह एकत्र करणे;
- सार्वत्रिकता, निदान प्रक्रियेच्या एकीकरणास प्रोत्साहन देणे;
- CAN बस द्वारे सुरक्षा प्रणाली कनेक्ट करण्याची क्षमता (प्रत्येक नियंत्रण घटकावर वायरिंग चालविण्याची आवश्यकता नाही).
कॅन बसचे तोटे:
- कमी विश्वसनीयता;
- कंट्रोल युनिट्सपैकी एकाचे नुकसान झाल्यामुळे CAN कनेक्शनची पूर्ण अक्षमता होऊ शकते.
ट्रबल-शूटिंग
वाहनाच्या डॅशबोर्डवर CAN फॉल्ट इंडिकेटर लाइट नाही. CAN बसची कामगिरी अप्रत्यक्ष निर्देशकांद्वारे बिघडलेली आहे हे तुम्ही ठरवू शकता:
- डॅशबोर्डवर एकाच वेळी अनेक फॉल्ट इंडिकेटर दिवे पेटले;
- शीतलक तापमान आणि इंधन पातळी गायब झाली;
सर्व प्रथम, आपण निदान केले पाहिजे. जर ते CAN बसमध्ये खराबी दर्शवत असेल, तर तुम्ही समस्येचे निराकरण करणे सुरू केले पाहिजे.
कामाचा क्रम:
- पिळलेल्या जोडी बसचे कंडक्टर शोधा. ते बहुतेक वेळा काळे (उच्च) आणि नारिंगी-तपकिरी (कमी) असतात.
- मल्टीमीटर वापरून इग्निशनसह कंडक्टरवरील व्होल्टेज तपासा. पातळी 0 किंवा 11 व्होल्टपेक्षा जास्त नसावी (सामान्यतः सुमारे 4.5 व्होल्ट).
- इग्निशन बंद करा आणि बॅटरी टर्मिनल डिस्कनेक्ट करा. कंडक्टरमधील प्रतिकार मोजा. जर ते शून्याकडे झुकत असेल, तर याचा अर्थ बसमध्ये शॉर्ट सर्किट आहे, जर ती अनंताकडे गेली तर ब्रेक आहे.
- ओपन सर्किट किंवा शॉर्ट सर्किट शोधणे सुरू करा.
- कोणत्याही कंट्रोल युनिटच्या बिघाडामुळे बस बंद असल्याची शंका असल्यास, तुम्ही क्रमाक्रमाने कंट्रोल युनिट्स बंद करू शकता आणि बसच्या प्रतिकार आणि कामगिरीचे निरीक्षण करू शकता.
CAN बस खराब होणे ही वाहनाच्या इलेक्ट्रिकल उपकरणांची एक जटिल खराबी आहे. कार मालकाकडे आवश्यक विद्युत दुरुस्ती कौशल्ये नसल्यास, तज्ञांच्या सेवा वापरणे चांगले.