कझाकस्तान प्रजासत्ताकचे विज्ञान आणि शिक्षण मंत्रालय
कारागांडा स्टेट टेक्निकल युनिव्हर्सिटी
विभाग____________
निबंध
विषय: “ड्रायव्हर-वाहन-रस्ता व्यवस्था”
अपघात विश्लेषण.
पूर्ण: कला. gr TT-09-2
स्वीकारले: पीएच.डी. प्रा.
करागंडा 2012
सिस्टम "ड्रायव्हर - कार - रोड"
रस्त्याच्या ऑपरेशनचे विश्लेषण करताना, "ड्रायव्हर - कार - रस्ता" या जटिल प्रणालीचा विचार करणे आवश्यक आहे. या संकल्पनांच्या यांत्रिक मालिकेत थेट कनेक्शन आहे: ड्रायव्हर नियंत्रित करतो, कार रस्त्याच्या बाजूने फिरते. अभियांत्रिकी-मानसिक संबंधांमध्ये, अभिप्राय देखील कार्य करतो: रस्ता माहिती प्रसारित करतो, ड्रायव्हर ही माहिती समजतो आणि कार नियंत्रित करण्यासाठी त्याचा वापर करतो. या प्रणालीची प्रमुख भूमिका ड्रायव्हरची आहे.
अभिप्राय (रस्ता - कार) ड्रायव्हरमधून, त्याच्या संवेदना, मानस आणि स्नायूंद्वारे जातो. ड्रायव्हरच्या साहाय्याने रस्ता गाडी पुढे नेतो. वाहतुकीचा वेग जसजसा वाढत जातो तसतसे लोक, वाहने आणि रस्त्यांवरील मागणी वाढते.
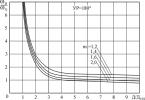
डिझाइनचा वेग हा जास्तीत जास्त वेग आहे जो अनुभवी ड्रायव्हरच्या हातात एकाच वाहनाची सुरक्षित हालचाल सुनिश्चित करू शकतो. हे रस्त्यांचे भौमितिक मापदंड, मार्गाची शैली, रस्त्याची रचना आणि रस्त्यांची परिस्थिती यावर निश्चित केले जाते. गर्दीच्या वेळी, कार प्रवाहात प्रवेश करते. मोकळ्या परिस्थितीत कारचा वेग जितका जास्त तितका लक्षणीय कमी होतो आणि प्रवाहात फिरणाऱ्या कारची विषमताही जास्त.
आजकाल "ड्रायव्हर - कार - रोड" प्रणालीमध्ये ड्रायव्हरचा विचार करण्याची प्रथा आहे.
प्रणालीचा प्रारंभिक दुवा माहितीचा स्त्रोत आहे: रस्ता, त्याची व्यवस्था आणि परिसर; त्याची "लोकसंख्या" (वाहने आणि पादचारी); चिन्हे आणि सिग्नल, तसेच डॅशबोर्डवरील इन्स्ट्रुमेंट रीडिंग; बाह्य आणि शरीरात आवाज; इंजिन आणि इतर यंत्रणेच्या ऑपरेशनमधून ड्रायव्हरपर्यंत पोहोचणारी कंपने. माहितीच्या स्त्रोतांमध्ये प्रवासी, त्यांचे आवाज आणि त्यांच्या हालचालींचा समावेश होतो.
पुढील दुवा ही माहिती ड्रायव्हरला, त्याच्या शरीराकडे, कानांकडे आणि विशेषत: डोळ्यांपर्यंत पोहोचते.
त्यानंतर माहितीवर प्रक्रिया करण्यासाठी आणि ड्रायव्हरच्या हात आणि पायांना आदेश जारी करण्यासाठी एक लिंक आहे.
चौथा दुवा म्हणजे लीव्हर आणि पेडल्स आणि त्यांच्याकडून कारच्या यंत्रणेकडे कमांडचे प्रसारण.
पाचवा - चाके, इंजिन, प्रकाश आणि सिग्नलिंग उपकरणांद्वारे आदेशांची अंमलबजावणी.
शेवटी (सहावा दुवा), ड्रायव्हरने नियोजित केलेले वाहन युक्ती आणि रस्त्यावरील परिस्थितीशी संबंधित बदल.
युक्ती एक विशिष्ट चक्र पूर्ण करते आणि त्याच वेळी नवीन प्रारंभ करते. अखेरीस, ब्रेक लावताना कारचा झुकता आणि ब्रेक दाबणे, वळताना केंद्रापसारक शक्तीची क्रिया आणि खिडक्यांच्या बाहेरील वस्तूंची हालचाल - ही सर्व ड्रायव्हरसाठी नवीन माहिती आहे.
फक्त पहिली लिंक ड्रायव्हरचे पालन करत नाही. तो निसर्गाने आणि इतर लोकांनी निर्माण केला आहे, त्याला विरोध होताना दिसतो. आणि तरीही, काहीतरी त्याच्यावर अवलंबून असते, त्याच्या ड्रायव्हिंग शैलीवर, उदाहरणार्थ, त्याच्या स्वत: च्या कारचा आवाज आणि कंपन. परंतु दुसरा दुवा म्हणजे सिग्नल्सची परिणामकारकता आणि बॉडी विंडोचा आकार ज्याद्वारे सिग्नल येतात, परंतु ड्रायव्हरची ते समजण्याची क्षमता देखील आहे. तिसरे आणि अर्धवट चौथे दुवे ड्रायव्हरच्या स्वतःच्या मनोवैज्ञानिक गुणांमध्ये एम्बेड केलेले आहेत. बाकीचे पूर्णपणे त्याच्या आज्ञेनुसार कार्य करतात, जरी, अर्थातच, त्यांची अंमलबजावणी कारच्या डिझाइनच्या परिपूर्णतेशी संबंधित आहे.
अधिक महत्त्वाचे काय आहे, वेळेवर माहिती मिळणे किंवा ड्रायव्हर कमांडचे जलद, अचूक प्रसारण? मूल्यांचे कठोर प्रमाण स्थापित करणे शक्य होईल हे संभव नाही, परंतु एक महत्त्वपूर्ण सामान्य निष्कर्ष काढला जाऊ शकतो: सिस्टमचा मुख्य सदस्य - ड्रायव्हर - इतर सर्वांपेक्षा भिन्न दृष्टीकोन आवश्यक आहे, ज्याची परिपूर्णता घेतली जाते. डिझाइनर, रस्ते बांधकाम व्यावसायिक आणि इतर तज्ञांची काळजी. ड्रायव्हर देखील सुधारला जाऊ शकतो, परंतु तांत्रिक मार्गाने नाही तर प्रशिक्षण, शिक्षण आणि प्रशिक्षणाद्वारे.
तांत्रिक माध्यमे सिस्टमच्या वैयक्तिक भागांच्या ऑपरेशनची विशिष्ट हमी देतात. कारच्या डिझाइनमध्ये ड्रायव्हरला मदत करणारे, त्याच्या चुका सुधारण्यासाठी आणि अपुरी कार्यक्षमता असलेले घटक देखील आहेत. उदाहरणार्थ, जर ड्रायव्हरने स्टीयरिंग व्हीलला शक्ती लागू करणे थांबवले, तर ते आपोआप "सरळ पुढे" स्थितीत परत येते.
आणि ड्रायव्हरचे शिक्षण केवळ त्याच्या चुकांची शक्यता कमी करते आणि त्याची कार्यक्षमता वाढवते. तो कितीही पात्र असला तरीही, हे शक्य आहे की एखाद्या निर्णायक क्षणी तो एखाद्या गोष्टीने वाहन चालवण्यापासून विचलित होईल किंवा चुकीची हालचाल करेल. बहुसंख्य असलेल्या कमी पात्रतेबद्दल काय म्हणायचे!
त्यामुळे ड्रायव्हरची तयारी आणि प्रशिक्षणाचे प्रचंड महत्त्व आहे. परंतु ते, जसे ओळखले जाते, डिझाइनरवर अवलंबून नसतात, ज्याने ड्रायव्हरच्या चुका कमी करण्यासाठी सिस्टमचे घटक अशा प्रकारे पार पाडले पाहिजेत. तंत्रज्ञानामध्ये, मशीनच्या या डिझाइनला कधीकधी "फुल-प्रूफ" (फूल-प्रूफ) म्हटले जाते.
कारवर अजूनही अनेक अपूर्ण उपकरणे आहेत, परंतु त्यांची संख्या कमी होत आहे. ही परिस्थिती कोणत्याही ड्रायव्हरला परिचित आहे - गलिच्छ रस्त्यावर ओव्हरटेक करणे. तुम्हाला स्टीयरिंग व्हील, टर्न सिग्नल स्विच, गियर लीव्हर आणि क्लच पेडल, विंडशील्ड वॉशर आणि वायपर बटणे ऑपरेट करावी लागतील; जर वॉशर बटण पायाने चालवलेले असेल, तर डाव्या पायाची हालचाल थेट ॲक्रोबॅटिक बनते; रात्री, हेडलाइट स्विच जोडला जातो. येथे प्रशिक्षित पाय चुकीची हालचाल करेल! आणि नवीनतम (परंतु अद्याप नाही, सर्व) कारमध्ये, वॉशर आणि वायपर बटणावर एका बोटाने दाबून चालू केले जातात, स्टीयरिंग व्हीलच्या खाली लाइट स्विच स्थापित केला जातो - आपण एकाच वेळी हेडलाइट्स आणि फ्लॅशिंग लाइट्स शिवाय नियंत्रित करू शकता चाकातून हात काढणे. ड्रायव्हर त्रुटीची शक्यता जवळजवळ पूर्णपणे काढून टाकली आहे.
कारमध्ये ऑटोमॅटिक ट्रान्समिशन असेल आणि तुम्हाला क्लच पेडल दाबावे लागत नसेल तर ते आणखी चांगले आहे. अर्थात, स्वयंचलित ड्रायव्हर क्रिया साध्य करण्यासाठी, सिस्टमचे इतर भाग स्वयंचलित करणे आवश्यक आहे, प्रामुख्याने नियंत्रणे. आणि हळूहळू हे ऑटोमेशन लागू केले जात आहे. तथापि, महत्त्वाचे घटक कार्यात येतात.
प्रथम, स्वयंचलित डिव्हाइसेस पूर्णपणे "पूर्ण पुरावा" असणे आवश्यक आहे आणि पूर्णपणे निर्दोषपणे कार्य करते, अन्यथा ते ड्रायव्हरला गंभीरपणे खाली सोडू शकतात. म्हणून, ऑटोमेशन काळजीपूर्वक विकसित केले जाते, उपकरणे उच्च-गुणवत्तेच्या सामग्रीपासून बनविली जातात आणि ती महाग होतात.
दुसरे म्हणजे, कारचे "नॉन-ट्रान्सपोर्ट फंक्शन्स" प्रभावित होऊ लागतात. आधीच नमूद केल्याप्रमाणे, कार चालवणे हे केवळ एक काम नाही, वाहतूक ऑपरेशन करणे देखील आहे, परंतु प्रत्येक वाहन चालकाला माहित आहे की, हे काम रोमांचक किंवा अगदी आनंददायक आहे, एक प्रकारचा क्रीडा खेळ आहे. काही वाहनचालकांना गीअर्स बदलायला आवडतात आणि स्वतःच, कारची गुळगुळीत आणि शांत राइड किंवा त्याउलट, "रेसिंग शैलीमध्ये" चक्रीवादळ सुरू होते. आणि ते ऑटोमेशनसाठी फारसे उत्सुक नाहीत.
परंतु प्रत्येक खेळाचे नियम असतात, जे आवडो किंवा न आवडो, ते पाळावेच लागतात. ते बदलतात आणि सुधारतात. एकेकाळी, “कार गेम” च्या नियमांमध्ये सहलीसाठी अर्धा तास तयारी करणे, अनेक परिस्थितींमध्ये अनिवार्य सिग्नलिंग, तीन ब्रेक लीव्हर (तथापि केवळ 10-30 किलोमीटर प्रति तासाच्या वेगाने!), आणि लाजाळू घोड्यांचा सामना करताना देखील थांबणे. वाहतुकीची तीव्रता आणि वेग वाढणे, सर्व वयोगटातील लाखो "हौशी खेळाडू" रस्त्यावर प्रवेश करणे, परिस्थितीतील कोणत्याही बदलांसाठी कार आणि ड्रायव्हरची त्वरित तयारी, ध्वनी सिग्नलवर बंदी आणि हळूहळू ऑटोमेशन आवश्यक आहे. कार. आज "खेळाडू" तीन पेडल आणि दोन लीव्हर हाताळतो उद्या त्यांची संख्या कमी होईल.
याचा अर्थ असा आहे की सर्व वाहन यंत्रणेच्या ऑपरेशनने ड्रायव्हरच्या आदेशांची सर्वात अचूक अंमलबजावणी सुनिश्चित करणे आवश्यक आहे, तसेच शक्य असल्यास, ते चुकीचे किंवा चुकीचे असल्यास त्यांची दुरुस्ती करणे आवश्यक आहे. शेवटची शिफारस पुन्हा अवास्तव वाटू शकते.
परंतु येथे एक उदाहरण आहे, शिवाय, शरीराच्या आकाराशी संबंधित.
उच्च वेगाने, वाहनाची वायुगतिकीय स्थिरता अधिक महत्त्वाची बनते. हे सर्व बहुतेक शरीराच्या आकारावर अवलंबून असते. एक काळ असा होता जेव्हा, फॅशनच्या प्रभावाखाली आणि अश्रू आकाराच्या इच्छेने, शरीर त्याच्या मागील भागाच्या लहान बाजूच्या पृष्ठभागासह बनवले गेले. परंतु स्टेप केलेल्या किंवा तिरक्या मागील बाजूच्या गाड्या बाजूच्या वाऱ्याच्या झुळूकांना खूप संवेदनशील होत्या आणि काहीवेळा ड्रायव्हर्सना योग्यरित्या प्रतिक्रिया देण्यासाठी वेळ मिळत नाही. दुःखद परिणामांसह अनेक ज्ञात प्रकरणे आहेत. किल्ड कार आणि स्टेशन वॅगन (जसे की काचेच्या व्हॅन) च्या वायुगतिकीय अभ्यासाने मागील बाजूच्या पृष्ठभागाच्या क्षेत्रफळाचे फायदे दर्शविले आहेत.
स्टेशन वॅगन, “कॉम्बी” आणि स्पोर्ट्स कार “कट-ऑफ रियरसह”, असे दिसून आले की, ड्रायव्हरच्या सहभागाशिवाय पार्श्व वायुगतिकीय शक्तींच्या प्रभावाचा प्रतिकार करू शकतात, ज्यामुळे ड्रायव्हरची आणखी एक चिंता दूर होते.
अपघात विश्लेषण
सर्व प्रकारच्या रस्ते अपघातांचे तपशीलवार विश्लेषण त्यांना कारणीभूत घटक आणि कारणे ओळखल्याशिवाय अशक्य आहे. ट्रॅफिक व्यवस्थापनातील अनुभव आणि ट्रॅफिक सेफ्टी क्षेत्रातील संशोधन जसजसे जमा होत जाते तसतसे रस्ते अपघातांचे घटक आणि कारणांवरील दृश्ये बदलतात.
रस्ता अपघात विश्लेषणाच्या उद्दिष्टे आणि उद्दिष्टांनुसार, विश्लेषणाच्या तीन मुख्य पद्धती ओळखल्या जातात: परिमाणवाचक, गुणात्मक, स्थलाकृतिक.
रस्ते अपघातांचे परिमाणवाचक विश्लेषण - स्थानानुसार अपघातांच्या पातळीचे मूल्यांकन करते (इंटरसेक्शन, मुख्य रस्ता, शहर, प्रदेश, देश, संपूर्ण जग) आणि त्यांच्या घटनेची वेळ (तास, दिवस, महिना, वर्ष, इ.) परिपूर्ण निर्देशक देतात. अपघातांच्या पातळीची सामान्य कल्पना, विशिष्ट प्रदेशासाठी कालांतराने तुलनात्मक विश्लेषण करण्यास अनुमती द्या आणि या पातळीतील बदलांमधील ट्रेंड दर्शवा.
अधिकृत आकडेवारीनुसार, रस्ते अपघातांची तीव्रता वेगवेगळ्या देशांमध्ये 1/5 ते 1/40 पर्यंत बदलते हे लक्षात घेतले पाहिजे की किरकोळ शारीरिक दुखापतींसह रस्ते अपघातांच्या कव्हरेजच्या पूर्णतेवर मोठा प्रभाव पडतो, ज्यामुळे, मुख्यत्वे विम्यावरील कायदेशीर तरतुदींवर अवलंबून असते.
अपघाताच्या परिणामांची तीव्रता, त्याव्यतिरिक्त, एकूण अपघातांच्या संख्येच्या मृत किंवा जखमींच्या संख्येच्या गुणोत्तराद्वारे दर्शविली जाऊ शकते.
विशिष्ट प्रकारच्या रस्ता अपघाताच्या (टक्कर, रोलओव्हर इ.) तीव्रतेचे मूल्यांकन करण्यासाठी, एक निर्देशक वापरला जाऊ शकतो जो या प्रकारच्या रस्ते अपघातांच्या संख्येच्या मृत्यूच्या (जखमी) संख्येचे गुणोत्तर आहे.
रस्ते अपघातांमुळे होणारे नुकसान निश्चित करण्यासाठी, रस्ते अपघातातील भौतिक नुकसान मोजण्यासाठी विविध पद्धती विकसित केल्या गेल्या आहेत. सामान्य तत्त्व खालीलप्रमाणे आहे: नुकसान पारंपारिकपणे प्रत्यक्ष आणि अप्रत्यक्ष विभागले जातात.
प्रत्यक्ष नुकसानीमध्ये भौतिक नुकसानींचा समावेश होतो जे याच्या परिणामी झाले: भौतिक मालमत्तेचे नुकसान किंवा नाश (वाहने, वाहतूक केलेल्या वस्तू, वाहतूक व्यवस्थापनाची तांत्रिक साधने आणि रस्ते बांधकाम); वाहतूक आणि वाहनांची जीर्णोद्धार; रस्त्यांच्या संरचनेची दुरुस्ती आणि रस्ते सुधारणा घटक; लोकांना मदत आणि उपचार प्रदान करणे; पीडित आणि त्यांच्या कुटुंबियांना रोख लाभ आणि पेन्शन देय; वाहतूक विलंब (वाहनांचा वेळ कमी होणे, इंधनाचा जास्त वापर, प्रवाशांचा वेळ वाया जाणे).
अप्रत्यक्ष नुकसानामध्ये समाजातील सदस्यांच्या श्रम क्रियाकलाप तात्पुरत्या किंवा पूर्ण बंद होण्याशी संबंधित नुकसान समाविष्ट आहे, म्हणजे, देशाच्या राष्ट्रीय उत्पन्नाच्या काही भागाचे सशर्त नुकसान.
रस्ता नेटवर्कच्या वैयक्तिक घटकांच्या धोक्याचे अविभाज्य मूल्यांकन, अपघाताच्या परिणामांची तीव्रता लक्षात घेऊन, रस्ता अपघातांच्या धोक्याच्या किंवा तीव्रतेच्या सूचकाद्वारे निर्धारित केले जाऊ शकते.
रस्ते अपघातांचे गुणात्मक विश्लेषण रस्ते अपघातांचे कारण आणि परिणाम घटक आणि रस्ते अपघातांवर त्यांचा प्रभाव किती प्रमाणात आहे हे स्थापित करते. हे विश्लेषण आम्हाला "रस्ते वाहतूक" प्रणालीच्या प्रत्येक घटकासाठी अपघातांची कारणे आणि घटक ओळखण्यास अनुमती देते. बहुमतात
देशांमध्ये, ट्रॅफिक अधिकाऱ्यांकडून सार्वजनिक मत आणि अधिकृत आकडेवारी बहुतेकदा रस्ते अपघातांचे मुख्य कारण निष्काळजीपणा, रहदारी सहभागींच्या चुका (ड्रायव्हर, पादचारी) किंवा वाहनातील खराबी म्हणून पाहते. अशा प्रकारे, जागतिक आरोग्य संघटनेचे असे मत आहे की 10 पैकी 9 रस्ते अपघात हे मानवी चुकांमुळे होतात.
रस्ते अपघातांच्या कारणांचे विश्लेषण आम्हाला त्यांना खालील गटांमध्ये कमी करण्यास अनुमती देते:
तक्ता 3.1 - अपघातांची कारणे
| 1 गट |
दुसरा गट |
| या चळवळीतील सहभागी, म्हणजे चालक, पादचारी आणि प्रवासी वाहतूक नियमांचे पालन करण्यात अयशस्वी. |
अशा ड्रायव्हिंग मोडच्या ड्रायव्हर्सची निवड ज्यामध्ये ते वाहने नियंत्रित करण्याच्या क्षमतेपासून वंचित आहेत, परिणामी स्किडिंग, रोलओव्हर्स, टक्कर इ. |
| 3 गट |
4 गट |
| थकवा किंवा आजारपणाचा परिणाम म्हणून रहदारी सहभागींच्या सायकोफिजियोलॉजिकल फंक्शन्समध्ये घट. |
त्याच्या सामान्य स्थितीत बदल होण्यास कारणीभूत असलेल्या घटकांच्या प्रभावाखाली अल्कोहोलयुक्त पेये, औषधे, औषधे यांचे सेवन (कामावर किंवा कुटुंबातील अस्वास्थ्यकर वातावरण, प्रियजनांचे आजार इ.). |
| 5 गट |
6 गट |
| वाहनांची असमाधानकारक तांत्रिक स्थिती; |
चुकीचे प्लेसमेंट आणि कार्गो सुरक्षित करणे |
| 7 गट |
8 गट |
| रस्त्याच्या घटकांची असमाधानकारक रचना आणि देखभाल आणि रहदारीची परिस्थिती. |
खराब वाहतूक व्यवस्थापन. |
ट्रॅफिक अपघाताचे विश्लेषण करताना, त्याचे कारण ड्रायव्हरला देणे सर्वात सोपे आहे, जो असे मानले जाते की, रहदारीच्या परिस्थितीतील बदलांना त्वरित प्रतिसाद देणे आणि व्हीएडी सिस्टमच्या घटकांच्या अपूर्णतेची भरपाई करणे "मनुष्य -" आहे. कार - रस्ता" आवश्यक नियंत्रण तंत्रांसह जे सुरक्षित ड्रायव्हिंग सुनिश्चित करतात. तथापि, असा आत्मविश्वास योग्यरित्या स्थापित केलेला नाही. अननुभवी, अप्रामाणिकपणा किंवा ठराविक अधिकाऱ्यांच्या निष्काळजीपणामुळे अनेक अपघात होतात. उदाहरणार्थ, वाहनांमधील दोष, रस्त्यावरील खराब प्रकाशयोजना, रस्त्याची असमाधानकारक स्थिती, रस्त्यावरील चुकीच्या खुणा, चुकीची स्थापना आणि रस्त्याच्या चिन्हांची खराब स्थिती इत्यादींमुळे होणारे रस्ते वाहतूक अपघात.
स्वयंचलित नियंत्रण प्रणालीच्या विपरीत, ड्रायव्हरकडे सर्व असंख्य प्रकारच्या रहदारी परिस्थितींना प्रतिसाद देणारी प्रोग्राम केलेली प्रणाली नाही. मर्यादित कालावधीत समस्या सोडवण्याच्या संभाव्य पर्यायांचा विचार करून, तो चुका करू शकतो, ज्याची संख्या कामाच्या प्रक्रियेत त्याच्या सायकोफिजियोलॉजिकल क्षमता कमी झाल्यामुळे वाढते. वेगाने चालणे, अयोग्य ओव्हरटेकिंग किंवा वळणे, पादचाऱ्याला धडकणे इ. यासारख्या रस्ते अपघातांच्या अधिकृत कारणांमागील ही परिस्थिती लक्षात घेतल्यास, अनेक प्रकरणांमध्ये असे आढळून येईल की रस्ते अपघातांचे खरे कारण ड्रायव्हरच्या चुकीच्या कृती नव्हते, परंतु रस्त्याशी, किंवा कारशी, किंवा एकाच वेळी दोन्हीशी संबंधित इतर घटक. परिणामी, सध्याच्या रहदारीच्या परिस्थितीबद्दल ड्रायव्हरचा थोडासा गैरसमज वाहतूक अपघाताचा धोका निर्माण करण्यासाठी पुरेसा होता.
रस्त्यावरील वाहतूक अपघाताच्या तत्काळ आधीच्या कालावधीत आणि त्याच्या विकासादरम्यान, प्रत्येक कारणाचा प्रभाव सारखा नसतो. अपघाताच्या विकासाच्या प्रत्येक टप्प्यात, एक मुख्य, प्रमुख कारण ओळखले जाऊ शकते. घटनेच्या पुढील टप्प्यांमध्ये, हे कारण दुय्यम, सोबत असू शकते
इ.................
पर्यावरणीय परिस्थितीत कार-ड्रायव्हर-रस्ता परस्परसंवाद यांसारख्या सिस्टम घटकांच्या संपूर्णतेद्वारे रस्ता सुरक्षा समस्येची विशिष्ट वैशिष्ट्ये निर्धारित केली जातात.
त्याच वेळी, आम्ही आणखी एका घटकाबद्दल बोलू शकतो - पादचारी, कारण आकडेवारीनुसार, सर्व अपघातांपैकी 25% अपघात त्यांच्या चुकांमुळे होतात. तरीही, या घटकांची उच्च पातळी सुनिश्चित करण्यासाठी वाहतूक सुरक्षा प्रणाली तयार केली पाहिजे. सिस्टमचा प्रत्येक घटक संबंधित कागदपत्रांद्वारे नियमन केलेल्या, योग्य सुरक्षा आवश्यकतांच्या अधीन आहे.
जरी घटकांचे विशिष्ट वजन बदलत असले तरी ते सर्व समान लक्षणीय आहेत.
अधिकृत आकडेवारी सांगते की वाहनांच्या तांत्रिक बिघाडामुळे 2 ते 5% रस्ते अपघात होतात. तथापि, हा आकडा अगदी अनियंत्रित आहे, कारण रस्ते अपघातांची विशिष्ट कारणे नेहमीच स्पष्टपणे ओळखली जात नाहीत. आधुनिक वाहनांच्या मुख्य तोट्यांपैकी, ब्रेकिंग सिस्टमची खराब उपकरणे, निलंबन आणि स्टीयरिंग लिंकेज घटकांची अपुरी विश्वासार्हता, सबऑप्टिमल ट्रेड पॅटर्न, स्टडचा अभाव, कारच्या हेडलाइट्सद्वारे प्रदान केलेल्या प्रकाशाची खराब गुणवत्ता लक्षात घेतली पाहिजे.
A-B-D प्रणालीतील दुसरा घटक सर्वात जास्त महत्त्वाचा आहे, आकडेवारीनुसार, 75% पेक्षा जास्त अपघात त्याच्या दोषामुळे होतात. मुख्य कारण म्हणजे चालकाचा शिस्तीचा अभाव, म्हणजे. प्रस्थापित प्रक्रियेचे पालन करण्याची इच्छा आणि परिणामी, मद्यधुंद अवस्थेत वाहन चालवणे, वेगवान, ओव्हरटेकिंगच्या नियमांचे उल्लंघन करणे, चौकातून वाहन चालवणे, क्रॉसिंग इ. इतर घटक, उदाहरणार्थ, अपुरे व्यावसायिक प्रशिक्षण, थकव्याच्या परिणामी सायकोफिजियोलॉजिकल क्षमता कमी झाल्यामुळे अपघात होण्याची शक्यता खूपच कमी आहे. ड्रायव्हर फॅक्टरची जटिलता, विशिष्टता आणि ड्रायव्हरची विश्वासार्हता सुनिश्चित करण्याच्या महत्त्वामुळे सिस्टमच्या इतर घटकांशी अतुलनीय आहे.
तिसऱ्या घटकाचे मूल्य, सराव दर्शविल्याप्रमाणे, अधिकृत आकडेवारी (8%) द्वारे निर्धारित केलेल्यापेक्षा बरेच मोठे आहे. रस्त्याच्या संरचनात्मक घटकांचा प्रभाव, त्याचे तांत्रिक मापदंड आणि रस्ता सुरक्षा सुनिश्चित करण्याच्या स्थितीचा अतिरेक करणे कठीण आहे. वाहतुकीची तीव्रता, रस्त्याची रुंदी, वक्रता त्रिज्या, उंची, दृश्यमानता इत्यादीसारख्या रस्त्यांच्या तांत्रिक बाबींमुळे वाहतूक सुरक्षितता प्रभावित होते. आणि मुख्य घटकांपैकी, हे लक्षात घेतले पाहिजे जसे की पृष्ठभागाचा निसरडापणा (रस्त्याला चाकांचा चिकटपणा), रस्त्याच्या पृष्ठभागाची समानता, रस्त्याच्या कडेची स्थिती आणि रस्त्यांची रचना.
वाहतूक सुरक्षेवर परिणाम करणाऱ्या प्रणालीच्या प्रत्येक घटकाची विशिष्ट वैशिष्ट्ये, या घटकांचे व्यवस्थापन आणि त्यांची सुधारणा हा रस्ता सुरक्षा प्रणालीचा आधार आहे.
मोटरायझेशन आणि आंतरराष्ट्रीय संबंधांच्या सध्याच्या स्तरासाठी सुरक्षिततेच्या समस्येसाठी आंतरराष्ट्रीय दृष्टीकोन आवश्यक आहे. हे विविध संयुक्त राष्ट्रांच्या प्रादेशिक आर्थिक आयोगांद्वारे आंतरराष्ट्रीय स्तरावर सोडवले जाते. विशेषतः, Economic Commission for Europe (UNECE) मध्ये एक अंतर्देशीय वाहतूक समिती आहे, ज्यांच्या कार्यक्षमतेमध्ये रस्ते वाहतूक, रस्ते वाहतूक, वाहतूक सुरक्षा इत्यादी समस्यांचा समावेश आहे.
1968 मध्ये, यूएसएसआरने इतर देशांसह, एकसमान परिस्थिती आणि उपकरणे आणि मोटार वाहनांच्या भागांच्या अधिकृत मंजुरीची परस्पर मान्यता यावर एक करार केला.
विशेषतः, करारानुसार:
1. सहभागींनी वाहनाच्या विशिष्ट घटक आणि पॅरामीटर आणि चाचणी पद्धतींसाठी एकसमान शिफारसी आणि आवश्यकता स्वीकारण्याचे आणि विकसित करण्याचे वचन दिले.
2. शिफारशी त्यांच्या देशांमधील नियम म्हणून सादर करा. योग्य उपकरणे उपलब्ध असल्यास, शिफारस केलेल्या प्रक्रियेनुसार चाचणी करा आणि परिणाम समाधानकारक असल्यास, निर्दिष्ट आवश्यकतांच्या संदर्भात वाहनाला मान्यता चिन्ह जारी करा. हे चिन्ह सर्व युरोपियन देशांसाठी आहे ई (उदाहरणार्थ: - जर्मनी;  - फ्रान्स;
- फ्रान्स;  - इटली).
- इटली).
3. करारामध्ये सहभागी झालेल्या सर्व देशांच्या प्रदेशात चाचण्या घेणाऱ्या देशाने नियुक्त केलेले आंतरराष्ट्रीय मान्यता चिन्ह ओळखा.
हे समजले पाहिजे की UNECE आवश्यकता किमान मानल्या जातात काही देश आणखी कठोर आवश्यकता वापरतात;
शिवाय, या गरजा सतत सुधारल्या जात आहेत, यात इंटरनॅशनल स्टँडर्ड्स ऑर्गनायझेशन (ISO) एक प्रमुख भूमिका बजावते, ज्यामध्ये ऑटोमोटिव्ह उद्योगातील आंतरराष्ट्रीय मानकीकरणाशी संबंधित तांत्रिक समिती 22 समाविष्ट आहे. सध्या, ISO द्वारे 3,000 हून अधिक मानके आणि शिफारसी तयार केल्या आहेत.
रस्त्यावर एक जटिल डायनॅमिक सिस्टम आहे, ज्यामध्ये घटकांचा संच समाविष्ट आहे “व्यक्ती”, “कार”, “रस्ता”, विशिष्ट “पर्यावरण” मध्ये कार्यरत. युनिफाइड रोड ट्रान्सपोर्ट सिस्टमचे हे घटक एकमेकांशी संबंध आणि कनेक्शनमध्ये असतात आणि एक विशिष्ट अखंडता तयार करतात.
रस्ता सुरक्षेच्या दृष्टिकोनातून, दोन्ही जोखीम घटक स्वतः आणि त्यांचे संयोजन पद्धतशीर अभ्यासासाठी स्वारस्यपूर्ण आहेत:
माणूस-कार;
कार-रस्ता;
रस्ता माणूस आहे.
अपघात घटकांचा प्रभाव कमी करण्यासाठी उपाय योजण्यासाठी, सर्व प्रथम, त्यांचे तपशीलवार विश्लेषण करणे आवश्यक आहे.
रस्ते सुरक्षा वाढविण्याचे मुख्य साधन म्हणून लागू होणाऱ्या संपूर्ण विविध उपायांना रस्ते अपघातांच्या मुख्य जोखीम घटकांनुसार तीन गटांमध्ये विभागले जाऊ शकते:
रस्ता वापरकर्त्यांच्या सुरक्षिततेचे वर्तन वाढवणे ("व्यक्ती" घटक) - शैक्षणिक, वैधानिक, राजकीय, सामाजिक क्रियाकलापांच्या चौकटीत क्रियाकलाप पार पाडण्याचा हेतू आहे ज्याचा उद्देश रस्ता वापरकर्त्यांसाठी वर्तनाचे एक सुरक्षित मॉडेल तयार करणे, इष्ट शिक्षणाद्वारे. आणि अनिष्ट वर्तन सुधारणे, तसेच सुरक्षा ऑडिटच्या चौकटीत रस्ते संघटनांच्या क्रियाकलापांसाठी;
वाहनांची सुरक्षितता सुधारणे (फॅक्टर "कार") - क्रियाकलापांचा एक भाग म्हणून क्रियाकलाप पार पाडण्याचा हेतू आहे ज्याचा उद्देश वाहनांची आणि त्यांच्या ऑपरेशनची विश्वसनीयता आणि सुरक्षितता वाढवणे आहे;
रस्त्यांच्या पायाभूत सुविधांची सुरक्षितता सुधारणे (“रस्ते” घटक) - वैयक्तिक रस्ते पायाभूत सुविधा आणि संपूर्ण नेटवर्क या दोन्हींचे नियोजन, डिझाइन, बांधकाम, देखभाल आणि ऑपरेशनशी संबंधित क्रियाकलापांच्या चौकटीत क्रियाकलाप पार पाडण्याचा हेतू आहे.
ड्रायव्हरची सायकोफिजियोलॉजिकल वैशिष्ट्ये अशा गुणांच्या संयोजनाद्वारे दर्शविली जातात जी त्याला कार चालवताना माहिती प्राप्त करण्यास आणि त्यावर प्रक्रिया करण्यास अनुमती देतात, जसे की धारणा आणि लक्ष, विचार आणि स्मृती, सेन्सरीमोटर प्रतिक्रिया.
रस्त्याची परिस्थिती त्वरीत बदलते, आणि ड्रायव्हरने मोठ्या प्रमाणात माहिती घेणे आवश्यक आहे, त्यामुळे समज पूर्ण, जलद आणि अचूक असणे आवश्यक आहे. आकलनाची गुणवत्ता (पूर्णता, वेग आणि अचूकता) ड्रायव्हरच्या ज्ञानावर आणि अनुभवावर अवलंबून असते आणि लक्ष देण्याच्या वैयक्तिक गुणधर्मांद्वारे दर्शविले जाऊ शकते.
लक्ष द्या -कोणत्याही वस्तूवर (घटना) किंवा इतर वस्तूंपासून (घटना) एकाचवेळी विचलित होणारी कृती ही चेतनाची एकाग्रता आहे. ड्रायव्हरचे लक्ष पुरेसे विपुल, हेतुपुरस्सर आणि निष्क्रीय, वितरण आणि स्विचिंग करण्यास सक्षम, तीव्र आणि टिकाऊ असले पाहिजे. वाहनचालकांचे लक्ष नसणे हे रस्ते अपघातांचे एक कारण आहे. लक्ष देण्याची व्याप्ती ड्रायव्हरची एकाच वेळी अनेक वस्तू, घटना आणि क्रिया पाहण्याची क्षमता दर्शवते. लक्ष देण्याचे प्रमाण ड्रायव्हरच्या अनुभवावर, मानसिक स्थितीवर आणि रहदारीच्या परिस्थितीवर अवलंबून असते.
निर्णय घेण्यासह ड्रायव्हरला समजलेल्या माहितीची प्रक्रिया विचाराच्या आधारे केली जाते.
विचार करत आहे -ही सर्वोच्च संज्ञानात्मक प्रक्रिया आहे, ज्यामुळे मानवी मनामध्ये समजलेल्या वस्तू किंवा घटनेचे सार समजले जाते. एखाद्याच्या कृती आणि इतर लोकांच्या वर्तनाचा परिणाम म्हणून काय प्रत्यक्षपणे पाहिले जात नाही हे जाणून घेणे शक्य करते. ड्रायव्हरला ऑपरेशनल विचारसरणीचे वैशिष्ट्य आहे, ज्याचे वैशिष्ठ्य म्हणजे रस्त्याची परिस्थिती समजून घेण्यासाठी आणि उपाय विकसित करण्यासाठी वेळ अत्यंत मर्यादित आहे आणि घेतलेल्या निर्णयाची त्वरित अंमलबजावणी केली जाते. ड्रायव्हरचे ऑपरेशनल विचार पुढील क्रमाने चालते: परिस्थितीचे मूल्यांकन करणे, त्याच्या विकासाचा अंदाज लावणे, उपाय विकसित करणे. योग्यरित्या विचार करण्याची क्षमता ड्रायव्हरच्या विशेष ज्ञानावर आणि अनुभवावर अवलंबून असते, जे त्याला परिस्थितीचे मूल्यांकन करण्यासाठी, त्याच्या विकासाचा अंदाज लावण्यासाठी आणि विशिष्ट परिस्थितीत आवश्यक क्रिया करण्यासाठी आवश्यक असलेली माहिती वेळेवर आठवण्यास अनुमती देते.
माहिती कॅप्चर करणे, संग्रहित करणे आणि पुनरुत्पादित करणे ही प्रक्रिया वैशिष्ट्यीकृत आहे स्मृतीड्रायव्हरने मार्ग आणि त्याची वैशिष्ट्ये नीट लक्षात ठेवली पाहिजेत, रस्त्याचे नियम ठामपणे जाणले पाहिजेत आणि सुरक्षित ड्रायव्हिंग कौशल्याची मजबूत पकड असावी. स्मरणशक्ती पुरेशा प्रमाणात, गती आणि स्मरणशक्तीची अचूकता आणि शिकलेली सामग्री टिकवून ठेवण्याच्या कालावधीद्वारे ओळखली जाणे आवश्यक आहे.
ड्रायव्हरला वेगाने बदलणाऱ्या परिस्थितीत आवश्यक असलेली माहिती मेमरीमधून सहज मिळवता आली पाहिजे, त्यामुळे त्याची स्मृती तयार असणे आवश्यक आहे. स्मृतीला ड्रायव्हर या क्षणी ज्या परिस्थितीमध्ये आहे तशाच परिस्थिती तसेच त्यासारख्या परिस्थितींमध्ये सर्वात योग्य निर्णय आणि कृती समजल्या पाहिजेत.
ड्रायव्हरची विश्वासार्हता विविध उत्तेजनांना प्रतिसाद म्हणून करत असलेल्या क्रियांची अचूकता, अचूकता, समयसूचकता आणि गती यावर अवलंबून असते. असे प्रतिसाद म्हणतात सेन्सरिमोटर प्रतिक्रिया.प्रतिसाद क्रियांची परिणामकारकता त्यांच्या निर्मितीच्या गतीवर अवलंबून असते, प्रतिक्रियेच्या वेळेनुसार अंदाजित. प्रत्येक ड्रायव्हरला विविध ऑपरेटिंग परिस्थितीत त्याच्या प्रतिक्रिया वेळेचे मूल्यांकन करणे आणि ते कमी करण्याचे मार्ग जाणून घेणे उचित आहे. प्रतिक्रिया साध्या किंवा जटिल असू शकतात. एक साधी प्रतिक्रिया ड्रायव्हरला ज्ञात असलेल्या एकाच सिग्नलच्या अपेक्षेशी संबंधित आहे, ज्याच्या प्रतिसादात ड्रायव्हरने विशिष्ट क्रिया करणे आवश्यक आहे. एक जटिल प्रतिक्रिया अनेक उत्तेजनांच्या आकलनाशी संबंधित आहे, ज्यामध्ये अनपेक्षित गोष्टींचा समावेश आहे आणि अनेक संभाव्य व्यक्तींमधून एक प्रतिसाद क्रिया निवडणे.
ड्रायव्हरने अनपेक्षितपणे बदलत्या रस्त्याच्या परिस्थितीत कार्य करण्यास सतत तयार असले पाहिजे, ज्यामुळे त्याची स्थिरता आणि लक्ष वेधण्याची तीव्रता सुनिश्चित होते. ड्रायव्हरच्या महत्त्वाच्या व्यावसायिक गुणांमध्ये रस्त्याच्या परिस्थितीचा अंदाज घेण्याची क्षमता आणि त्याच वेळी रस्त्याच्या चिन्हे, ट्रॅफिक लाइट्स, रस्त्याच्या खुणा, रस्त्याच्या लेआउट आणि प्रोफाइलमधील बदल इत्यादींचे निरीक्षण करणे समाविष्ट आहे.
बहुतेक प्रकरणांमध्ये, रस्ते अपघात हे परिस्थितीचे मूल्यांकन करण्यात आणि त्याच्या विकासाचा अंदाज लावण्यामध्ये चालकांच्या व्यावसायिक चुकांचा परिणाम आहेत, आणि वाहतूक नियमांचे उल्लंघन नाही (हेतुपूर्वक उल्लंघन वगळता). ड्रायव्हरने रस्त्यावर काय करावे किंवा काय करू नये हे नियम स्थापित करतात, परंतु ड्रायव्हरला विश्वासार्हपणे काम करण्यासाठी हे पुरेसे नाही. कोणत्याही परिस्थितीत, नियमांचे उल्लंघन न करण्यासाठी आणि आपत्कालीन परिस्थिती टाळण्यासाठी कसे कार्य करावे या प्रश्नाचे उत्तर ड्रायव्हरने शोधले पाहिजे.
वाहतूक प्रक्रियेच्या संबंधात, वाहन संचालन प्रणालीचे संरचनात्मक आकृती, काही नियमांसह, चार मुख्य ब्लॉक्सचा समावेश म्हणून प्रस्तुत केले जाऊ शकते: "ड्रायव्हर - कार - रस्ता - पर्यावरण" (VADS) (चित्र 2.1). ही योजना तुम्हाला संपूर्ण प्रणाली आणि उपप्रणालींचे स्वतंत्रपणे विश्लेषण करण्याची परवानगी देते.
तांदूळ. २.१.
दिलेल्या स्ट्रक्चरल आकृतीमध्ये, खालील मुख्य उपप्रणाली ओळखल्या जाऊ शकतात: 1 - बाह्य वातावरण - चालक; 2 - ड्रायव्हर - कार; 3 - कार - रस्ता; 4 - बाह्य वातावरण - रस्ता; 5 - रस्ता - कार; 6 - कार-ड्रायव्हर; 7 - बाह्य वातावरण - कार.
वाहतूक ऑपरेशनची कार्यक्षमता निश्चित करण्यासाठी उपप्रणालींच्या परस्परसंवादाचे विश्लेषण खूप महत्वाचे आहे. मुख्य उपप्रणालींचे सार थोडक्यात विचारात घेऊ.
"बाह्य वातावरण - ड्रायव्हर" उपप्रणाली हे वाहतूक प्रक्रियेचे एक माहिती मॉडेल आहे. हे रहदारीच्या परिस्थितीशी ड्रायव्हरच्या परस्परसंवादाच्या मनोवैज्ञानिक वैशिष्ट्यांवर आधारित आहे. बाह्य वातावरण हे एक माहिती क्षेत्र आहे जे ड्रायव्हरमध्ये भावनिक ताण निर्माण करते. ड्रायव्हर, बाह्य वातावरणाचे विश्लेषण करून, एक अभिमुखता निवडतो ज्यामुळे रहदारी सुरक्षितता आणि किमान भावनिक ताण सुनिश्चित होतो. हे या उपप्रणालीच्या घटकांच्या परस्परसंवादाचे सार आहे.
"ड्रायव्हर-कार" उपप्रणाली हे ड्रायव्हर आणि कारच्या ॲक्ट्युएटर्सच्या शारीरिक क्षमतांवर आधारित अर्गोनॉमिक मॉडेल आहे. बाह्य वातावरणातून माहिती प्राप्त करून आणि त्याचे विश्लेषण केल्यावर, ड्रायव्हर ॲक्ट्युएटर्सशी संवाद साधतो, कारच्या हालचालीवर नियंत्रण ठेवतो आणि त्यासाठी तर्कसंगत ड्रायव्हिंग मोड सेट करतो. रस्त्यावरील वाहनांच्या हालचालींचे संयोजन वाहतूक प्रवाह तयार करते. रहदारी सुरक्षा सुनिश्चित करण्याच्या समस्येसह कारच्या ऑपरेशनमध्ये काही समस्या सोडवण्यासाठी "ड्रायव्हर - कार" उपप्रणालीचा अभ्यास खूप महत्वाचा आहे.
"वाहन - रस्ता" उपप्रणाली हे वाहतूक प्रक्रियेचे यांत्रिक मॉडेल आहे. या उपप्रणालीचा मुख्य फोकस रस्त्याच्या पृष्ठभागासह निलंबन आणि चाकांच्या माध्यमातून वाहनाचा परस्परसंवाद आहे. गाडी चालवताना, कार रस्त्याच्या मार्गावर परिणाम करते, परिणामी रस्त्याच्या पृष्ठभागावर ताण येतो ज्यामुळे तिची मजबुती आणि टिकाऊपणा प्रभावित होतो. विचाराधीन उपप्रणालीच्या अभ्यासामुळे आम्हाला रस्ते चांगल्या तांत्रिक स्थितीत राखण्यासाठी विविध उपाय (देखभाल आणि दुरुस्ती) विकसित करण्याची परवानगी मिळते.
"बाह्य वातावरण - रस्ता" उपप्रणाली एक जटिल उष्णता आणि वस्तुमान हस्तांतरण मॉडेल आहे. हे रस्त्यावरील भौगोलिक संकुले (हवामान, भूप्रदेश, माती, जलविज्ञान, जलविज्ञान इ.) च्या जल-औष्णिक प्रभावाच्या विश्लेषणावर आधारित आहे. उदाहरणार्थ, पर्जन्यवृष्टीमुळे कोटिंग्जची कार्यक्षमता खराब होते. या उपप्रणालीच्या अभ्यासामुळे रस्त्यांची स्थिरता आणि रहदारी सुरक्षा सुधारण्यासाठी उपाययोजना विकसित करणे शक्य होते.
"रोड-कार" उपप्रणाली हे एक डायनॅमिक मॉडेल आहे ("कार-रोड" उपप्रणालीचा अभिप्राय) जेव्हा कार रस्त्याच्या बाजूने फिरते तेव्हा विविध असमान पृष्ठभागाच्या उपस्थितीमुळे, कार यादृच्छिक प्रभावांना कारणीभूत ठरते, संपूर्णपणे कारच्या ऑपरेशनल गुणधर्मांच्या सिद्धांतामध्ये, हे आपल्याला विविध समस्यांचे निराकरण करण्यास अनुमती देते - इंधनाच्या वापराची गणना करा, कारचा संभाव्य वेग निश्चित करा इ.
"कार-ड्रायव्हर" उपप्रणाली ही "ड्रायव्हर-कार" उपप्रणालीचा अभिप्राय आहे. या उपप्रणालीचे विश्लेषण आम्हाला ड्रायव्हर्सच्या कामगिरीवर रहदारीच्या परिस्थितीच्या प्रभावाचा अभ्यास करण्यास अनुमती देते. विशेषतः, ड्रायव्हर्ससाठी कंपन आणि आवाज मर्यादा स्थापित केल्या जाऊ शकतात. नियंत्रणे ठेवण्याची कार्यक्षमता, कारच्या आतील भागाचा आकार इ.
"बाह्य वातावरण - कार" उपप्रणाली कारच्या विश्वासार्हतेचा आणि विविध हवामानातील त्यांच्या ऑपरेशनचा अभ्यास करताना स्वारस्यपूर्ण आहे.
सर्व उपप्रणाली एका अंशाने किंवा दुसर्याशी एकमेकांशी जोडलेले आहेत. त्याच वेळी, प्रत्येक उपप्रणाली स्वतंत्र घटकांद्वारे दर्शविली जाऊ शकते. या दृष्टिकोनातून, ड्रायव्हर VADS प्रणालीमध्ये एक विशेष स्थान व्यापतो. हा प्रणालीचा एक घटक आहे जो कार नियंत्रित करतो आणि त्याचे कार्यप्रदर्शन राखण्यात भाग घेतो, म्हणजे. ऑपरेशनल विश्वसनीयता सुनिश्चित करणे.
कार नियंत्रित करणे आणि त्याच्या कामावर नियंत्रण ठेवणे हे ड्रायव्हरचे मुख्य कार्य आहे की कार चालविण्याचे शारीरिक कार्य कमी होत चालले आहे आणि समज, विचार, नियंत्रण कृती आणि कृतींची मागणी वाढली आहे. उच्च न्यूरो-भावनिक तणावाच्या परिस्थितीत ड्रायव्हरच्या व्यावसायिक क्रियाकलापांची विश्वासार्हता.
लेख psrkai “मनुष्य-यंत्र”, “मनुष्य-मशीन-पर्यावरण” प्रणालीची मुख्य लिंक... ही वाक्प्रचार आता लोकप्रिय झाली आहेत. परंतु, सर्वसाधारणपणे, प्रणाली नेहमीच अस्तित्वात आहे, कारण मशीन तयार करताना, लोकांचे हित नेहमी विचारात घेतले जाते. कोणाचे हित विचारात घेतले आणि कसे, हा एकच प्रश्न आहे. "व्यक्ती-वाहन-टी-रोड" प्रणालीमध्ये कोणाचा समावेश करावा? चालक की प्रवासी? किंवा कदाचित एक पादचारी? की मोटार वाहतूक कंपनीचे प्रमुख? कार कारखाना कामगार? कार सर्व्हिस स्टेशनवर मेकॅनिक? आज अशी व्यक्ती शोधणे कठीण आहे जी एक प्रकारे किंवा दुसऱ्या प्रकारे विचाराधीन प्रणालीच्या कक्षेत येत नाही. चला कार्य मर्यादित करू आणि ज्या अभिनेत्याला आपण मुख्य मानतो त्यावर लक्ष केंद्रित करूया. तो अजूनही ड्रायव्हर आहे. हे प्रत्येक चालत्या वाहनावर असते, मग ते मालवाहू असो किंवा प्रवासी असो, आणि प्रवासी नसले तरी नेहमीच एक चालक असतो. वैयक्तिक वापरासाठी असलेल्या कारमध्ये, ड्रायव्हर स्वतः प्रवासी असतो आणि बहुतेकदा तो एकटाच असतो; आम्हाला आकडेवारीवरून माहित आहे की, कारची सरासरी व्याप्ती 1.7 लोकांपेक्षा जास्त नाही. तो अनेकदा गाडीचा मालकही असतो. यात काही शंका नाही की कारमध्ये सामील असलेल्या सर्व व्यक्तींपैकी ड्रायव्हर हा सर्वात सक्रिय व्यक्ती आहे ज्यावर हालचालीचा वेग, कारची कार्यक्षमता, प्रवाशांची सुरक्षितता आणि सुविधा आणि मालवाहू सुरक्षा अवलंबून असते. बरेच ड्रायव्हर्स आहेत: आपल्या देशात, उदाहरणार्थ, हा सर्वात सामान्य व्यवसाय आहे. व्हीएडी सिस्टमचा मुख्य घटक - "ड्रायव्हर-वाहन रस्ता" निवडण्याच्या बाजूने हे युक्तिवाद आहेत. या प्रणालीमध्ये सात मुख्य दुवे असतात. प्रारंभिक, प्रथम - माहितीचे स्त्रोत: रस्ता, त्याची व्यवस्था आणि वातावरण, त्याची "लोकसंख्या" (वाहने आणि पादचारी), चिन्हे आणि सिग्नल, तसेच इन्स्ट्रुमेंट रीडिंग, आवाज, कंपन - बाह्य आणि शरीरात. माहितीच्या स्त्रोतांमध्ये प्रवासी, त्यांचे आवाज आणि हालचाली यांचा समावेश होतो. माहिती आवश्यक आणि उपयुक्त, अनावश्यक आणि दुर्मिळ असू शकते, दुसरा दुवा म्हणजे ड्रायव्हरला, त्याच्या शरीरात, कानांना आणि विशेषत: डोळ्यांकडे माहितीचा प्रवाह त्याचे पाय म्हणजे या आदेशांचे वाहन नियंत्रण, आणि सहाव्या दुव्या म्हणजे चाके, इंजिन, लाइटिंग आणि सिग्नलिंग उपकरणे संपूर्णपणे कारची युक्ती आणि रस्त्यावरील परिस्थितीशी संबंधित बदल हे केवळ ड्रायव्हरच्या अधीन नाही, ते निसर्ग आणि इतर लोकांद्वारे तयार केले गेले आहे. परंतु दुसरा दुवा त्याच्या क्षमतेवर अवलंबून आहे माहिती जाणून घेण्यासाठी. तिसरे आणि चौथे दुवे सायकोफिजिकल गुणांद्वारे आणि उर्वरित - ड्रायव्हरच्या आदेशांद्वारे निर्धारित केले जातात, जरी, अर्थातच, त्यांची अंमलबजावणी कारच्या डिझाइनच्या परिपूर्णतेशी संबंधित आहे. या वर्णनावरून, VAD अगदी साधे वाटू शकते. जसे की, अर्थातच, माहिती, त्याची प्रक्रिया, आदेश, त्यांची अंमलबजावणी. तथापि, कार डिझाइन आणि ऑपरेट करताना ही साधी योजना देखील विचारात घेणे सोपे नाही. सुरक्षित कारच्या मोहिमेत, अगदी अलीकडेपर्यंत, तथाकथित निष्क्रिय सुरक्षेला निर्णायक महत्त्व जोडले गेले होते (उदाहरणार्थ, मर्सिडीज-बेंझ सूचीमध्ये ते दोन तृतीयांश स्थानांपेक्षा जास्त आहे), जे लागू होते तेव्हा कार यापुढे ड्रायव्हरच्या नियंत्रणात नाही; दुसऱ्या शब्दांत, जेव्हा व्हीएडी सिस्टममधील मुख्य दुवा बाहेर पडतो. हे स्पष्ट आहे की मशीनच्या आत (तसेच बाहेरील) लोकांचे संरक्षण करण्यासाठी उपाय करणे अत्यंत आवश्यक आहे. पण अपघातात कार अजूनच नष्ट झाली आहे. याव्यतिरिक्त, कारच्या बाहेर बरेच नुकसान होऊ शकते. आता व्हीएडीच्या प्रत्येक घटकाची कार्यक्षमता केवळ 5 टक्क्यांनी वाढल्यास किती सुरक्षितता वाढेल याची गणना करण्याचा प्रयत्न करूया - म्हणजे दृश्यमानता सुधारणे, ड्रायव्हरला माहितीवर प्रक्रिया करण्यासाठी अनुकूल परिस्थिती निर्माण करणे, लीव्हर आणि पेडल्स अधिक सोयीस्करपणे स्थित करणे, आणि असेच. गणना दर्शवेल की या अगदी वास्तविक, अगदी माफक समस्येचे निराकरण केल्याने सिस्टमच्या ऑपरेशनमध्ये सुमारे 30 टक्के सुधारणा होईल. त्यानुसार वाहतूक सुरक्षितता वाढून अपघाताचे प्रमाण कमी होईल. प्रत्येक लिंकचे स्वतंत्रपणे काय महत्त्व आहे? अधिक महत्त्वाचे काय आहे - माहितीची वेळेवर पावती किंवा ड्रायव्हर कमांडचे जलद, अचूक प्रसारण? आम्ही मूल्यांचे कठोर प्रमाण स्थापित करू शकू अशी शक्यता नाही. एक गोष्ट स्पष्ट आहे: व्हीएडीचा मुख्य दुवा - ड्रायव्हर - एक विशेष दृष्टीकोन आवश्यक आहे. कारच्या डिझाइनमध्ये असे घटक आहेत जे त्यास मदत करतात, त्याच्या चुका सुधारतात आणि अपुरी कार्यक्षमता. ड्रायव्हर देखील सुधारला जाऊ शकतो - शिक्षण, प्रशिक्षणाद्वारे, तथापि, कारच्या तांत्रिक सुधारणेच्या विपरीत, हे हमी देत नाही. शिक्षणामुळे चुका होण्याची शक्यता कमी होते आणि चालक अधिक कार्यक्षम बनतो. आणि तरीही, व्हीएडी युनिट्सबद्दलचा पहिला व्यावहारिक निष्कर्ष म्हणजे ड्रायव्हरची तयारी आणि प्रशिक्षण यांचे प्रचंड महत्त्व. परंतु तो कितीही पात्र असला तरीही, हे शक्य आहे की एखाद्या निर्णायक क्षणी काहीतरी त्याचे वाहन चालवण्यापासून विचलित करेल किंवा त्याला चुकीची हालचाल करण्यास भाग पाडेल. दुसरा निष्कर्ष: सिस्टमचे घटक अशा प्रकारे पार पाडणे आवश्यक आहे की ड्रायव्हर चूक करू शकत नाही किंवा त्याची शक्यता कमी केली जाईल. माहितीचे कृत्रिम स्रोत तितकेच विश्वासार्ह असले पाहिजेत. अनाकलनीय किंवा तत्सम चिन्हे स्वीकार्य नाहीत आणि पादचाऱ्यांना रस्त्यावर दिसू नये. या क्षेत्रात अद्याप सर्व काही पूर्ण झालेले नाही. या दृष्टिकोनातून अपूर्ण असलेली अनेक उपकरणे कारमध्येच आढळू शकतात. प्रत्येक ड्रायव्हरला परिचित असलेली परिस्थिती - गलिच्छ रस्त्यावर ओव्हरटेक करणे. तुम्हाला स्टीयरिंग व्हील, टर्न सिग्नल स्विच, गियर लीव्हर आणि क्लच पेडल, विंडशील्ड वॉशर आणि वायपर बटणे ऑपरेट करावी लागतील; शिवाय, जर वॉशर बटण पायाने चालवलेले असेल, तर डाव्या पायाची हालचाल थेट ॲक्रोबॅटिक बनते. रात्री आणखी वाईट: एक हेडलाइट स्विच जोडला जातो. येथे प्रशिक्षित पाय चुकीची हालचाल करेल! नवीनतम कारमध्ये, वॉशर आणि वायपर एका बटणावर एका बोटाने दाबून सक्रिय केले जातात आणि स्टीयरिंग व्हीलच्या खाली लाईट स्विच स्थापित केला जातो. स्टीयरिंग व्हीलमधून हात न काढता तुम्ही एकाच वेळी हेडलाइट्स आणि फ्लॅशिंग लाइट्स नियंत्रित करू शकता. वाचक तुम्हाला सांगतील: कार स्वयंचलित ट्रांसमिशनसह सुसज्ज असल्यास आणि क्लच पेडल नसल्यास ते अधिक चांगले आहे. दुसऱ्या शब्दांत: ज्याप्रमाणे त्यांना ड्रायव्हरकडून स्वयंचलित हालचालींची आवश्यकता असते, त्याचप्रमाणे व्हीएडीच्या इतर घटकांचे ऑटोमेशन आणि सर्व प्रथम नियंत्रणे आवश्यक आहेत. या भागात काम चालू आहे पृष्ठ 37f वर आधुनिक प्रवासी कारमध्ये चालकाचे आसन. त्याला सर्वात अनुकूल कार्य वातावरण प्रदान करण्यासाठी येथे जवळजवळ सर्व उपाय केले गेले आहेत 40-टन डंप ट्रकवर, ड्रायव्हरसाठी हाय-स्पीड लोकोमोटिव्हच्या ड्रायव्हरपेक्षा वाईट परिस्थिती निर्माण केली गेली आहे. समायोजित करता येण्याजोगे आसन (पेडलपासून अंतर आणि बॅकरेस्टच्या टिल्टनुसार), एक अत्यंत कार्यक्षम हीटर आणि केबिनला फ्रेमपासून वेगळे करणारे रबर शॉक शोषक ड्रायव्हरसाठी चांगली कार्य परिस्थिती निर्माण करतात.