जगभरातील हजारो लोक दररोज दुरुस्ती करतात. ते करत असताना, प्रत्येकजण नूतनीकरणासोबत असलेल्या बारीकसारीक गोष्टींबद्दल विचार करू लागतो: कोणत्या रंगसंगतीमध्ये वॉलपेपर निवडायचे, वॉलपेपरच्या रंगाशी जुळणारे पडदे कसे निवडायचे, खोलीची एकसंध शैली प्राप्त करण्यासाठी फर्निचरची योग्य व्यवस्था कशी करावी. परंतु क्वचितच कोणीही सर्वात महत्वाच्या गोष्टीबद्दल विचार करत नाही आणि ही मुख्य गोष्ट म्हणजे अपार्टमेंटमधील इलेक्ट्रिकल वायरिंग बदलणे. अखेरीस, जुन्या वायरिंगमध्ये काहीतरी घडल्यास, अपार्टमेंट त्याचे सर्व आकर्षण गमावेल आणि राहण्यासाठी पूर्णपणे अयोग्य होईल.
अपार्टमेंटमधील वायरिंग कसे बदलायचे हे कोणत्याही इलेक्ट्रिशियनला माहित आहे, परंतु कोणताही सामान्य नागरिक हे करू शकतो, तथापि, या प्रकारचे काम करताना, खोलीत सुरक्षित विद्युत नेटवर्क मिळविण्यासाठी त्याने उच्च-गुणवत्तेची सामग्री निवडली पाहिजे.
केली जाणारी पहिली क्रिया आहे भविष्यातील वायरिंगची योजना करा. या टप्प्यावर, आपल्याला तारा कोठे घातल्या जातील हे निश्चित करणे आवश्यक आहे. तसेच या टप्प्यावर, आपण विद्यमान नेटवर्कमध्ये कोणतेही समायोजन करू शकता, जे आपल्याला मालकांच्या गरजेनुसार शक्य तितक्या आरामात दिवे आणि दिवे लावण्याची परवानगी देईल.
12.12.2019
विणकाम उप-उद्योगाची अरुंद-उद्योग साधने आणि त्यांची देखभाल
होजियरीची स्ट्रेचबिलिटी निर्धारित करण्यासाठी, एक उपकरण वापरले जाते, ज्याचा आकृती अंजीर मध्ये दर्शविला आहे. १.
डिव्हाइसची रचना स्थिर गतीने कार्य करत, चाचणी केलेल्या उत्पादनाच्या लवचिक शक्तींद्वारे रॉकर आर्मच्या स्वयंचलित संतुलनाच्या तत्त्वावर आधारित आहे.
वजनाचा बीम एक समान-सशस्त्र गोल स्टील रॉड 6 आहे, ज्याचा अक्ष रोटेशन 7 आहे. त्याच्या उजव्या टोकाला, पाय किंवा ट्रेस 9 चे स्लाइडिंग फॉर्म संगीन लॉक वापरून जोडलेले आहेत, ज्यावर उत्पादन ठेवले आहे. लोड 4 साठी एक निलंबन डाव्या खांद्यावर हिंग केलेले आहे आणि त्याचा शेवट बाण 5 ने संपतो, जो रॉकर आर्मची समतोल स्थिती दर्शवितो. उत्पादनाची चाचणी करण्यापूर्वी, रॉकर आर्म जंगम वजन 8 वापरून संतुलनात आणले जाते.

तांदूळ. 1. होजियरीची तन्य शक्ती मोजण्यासाठी डिव्हाइसचे आकृती: 1 - मार्गदर्शक, 2 - डावा शासक, 3 - स्लाइडर, 4 - लोडसाठी हॅन्गर; 5, 10 - बाण, 6 - रॉड, 7 - रोटेशनचा अक्ष, 8 - वजन, 9 - ट्रेस आकार, 11 - स्ट्रेच लीव्हर,
12- कॅरेज, 13-लीड स्क्रू, 14-उजवा शासक; 15, 16 - हेलिकल गियर, 17 - वर्म गियर, 18 - कपलिंग, 19 - इलेक्ट्रिक मोटर
स्ट्रेचिंग लीव्हर 11 सह कॅरेज 12 हलविण्यासाठी, लीड स्क्रू 13 वापरला जातो, ज्याच्या खालच्या टोकाला हेलिकल गियर 15 निश्चित केले जाते; त्याद्वारे रोटेशनल मोशन लीड स्क्रूवर प्रसारित केले जाते. स्क्रूच्या रोटेशनची दिशा बदलणे हे 19 च्या रोटेशनमधील बदलावर अवलंबून असते, जो वर्म गियर 17 ला कपलिंग 18 च्या सहाय्याने जोडलेला असतो. गियर शाफ्टवर एक हेलिकल गियर 16 बसविला जातो, जो थेट गियर 15 ला हालचाल प्रदान करतो. .
11.12.2019
वायवीय ॲक्ट्युएटर्समध्ये, समायोजन शक्ती झिल्ली किंवा पिस्टनवरील संकुचित हवेच्या क्रियेद्वारे तयार केली जाते. त्यानुसार, मेम्ब्रेन, पिस्टन आणि बेलोज यंत्रणा आहेत. ते वायवीय कमांड सिग्नलनुसार कंट्रोल वाल्व स्थापित आणि हलविण्यासाठी डिझाइन केलेले आहेत. जेव्हा कमांड सिग्नल 0.02 MPa (0.2 kg/cm 2) वरून 0.1 MPa (1 kg/cm 2) मध्ये बदलतो तेव्हा यंत्रणेच्या आउटपुट घटकाचा पूर्ण कार्यरत स्ट्रोक चालविला जातो. कार्यरत पोकळीतील संकुचित हवेचा जास्तीत जास्त दाब 0.25 MPa (2.5 kg/cm2) आहे.
रेखीय डायाफ्राम यंत्रणेमध्ये, रॉड परस्पर हालचाली करते. आउटपुट घटकाच्या हालचालीच्या दिशेवर अवलंबून, ते थेट क्रिया (झिल्लीच्या वाढत्या दाबासह) आणि उलट क्रियांच्या यंत्रणेमध्ये विभागले गेले आहेत.

तांदूळ. 1. डायरेक्ट-ॲक्टिंग मेम्ब्रेन ॲक्ट्युएटरची रचना: 1, 3 - कव्हर्स, 2 - झिल्ली, 4 - सपोर्ट डिस्क, 5 - ब्रॅकेट, 6 - स्प्रिंग, 7 - रॉड, 8 - सपोर्ट रिंग, 9 - समायोजित नट, 10 - कनेक्टिंग नट
झिल्ली ॲक्ट्युएटरचे मुख्य संरचनात्मक घटक एक कंस आणि हलणारा भाग असलेला झिल्ली न्यूमॅटिक चेंबर आहेत.
डायरेक्ट ॲक्शन मेकॅनिझमच्या मेम्ब्रेन न्यूमॅटिक चेंबरमध्ये (चित्र 1) कव्हर्स 3 आणि 1 आणि झिल्ली 2 असतात. कव्हर 3 आणि झिल्ली 2 एक सीलबंद कार्यरत पोकळी बनवते, कव्हर 1 ब्रॅकेट 5 ला जोडलेले आहे. फिरत्या भागामध्ये सपोर्ट डिस्क 4 समाविष्ट आहे. , ज्याला झिल्ली 2 जोडलेली असते, एक रॉड 7 कनेक्टिंग नट 10 आणि स्प्रिंग 6. स्प्रिंगचा एक टोक सपोर्ट डिस्क 4 च्या विरूद्ध असतो आणि दुसरा सपोर्ट रिंग 8 द्वारे समायोजित नट 9 मध्ये असतो, जो सेवा देतो. स्प्रिंगचा प्रारंभिक ताण आणि रॉडच्या हालचालीची दिशा बदलण्यासाठी.
08.12.2019
आज अनेक प्रकारचे दिवे आहेत. त्यांच्यापैकी प्रत्येकाचे स्वतःचे फायदे आणि तोटे आहेत. निवासी इमारत किंवा अपार्टमेंटमध्ये प्रकाशासाठी वापरल्या जाणाऱ्या दिव्यांच्या प्रकारांचा विचार करूया.

पहिला प्रकार म्हणजे दिवे तापलेल्या दिवा. हा सर्वात स्वस्त प्रकारचा दिवा आहे. अशा दिव्यांच्या फायद्यांमध्ये त्यांची किंमत आणि डिव्हाइसची साधेपणा समाविष्ट आहे. अशा दिव्यांचा प्रकाश डोळ्यांसाठी सर्वोत्तम आहे. अशा दिव्यांच्या तोट्यांमध्ये लहान सेवा जीवन आणि मोठ्या प्रमाणात वीज वापरली जाते.
पुढील प्रकारचे दिवे आहेत ऊर्जा वाचवणारे दिवे. अशा दिवे पूर्णपणे कोणत्याही प्रकारच्या बेससाठी आढळू शकतात. ते एक लांबलचक नळी आहेत ज्यामध्ये एक विशेष वायू आहे. हा वायू आहे जो दृश्यमान चमक निर्माण करतो. आधुनिक ऊर्जा-बचत दिव्यांसाठी, ट्यूबमध्ये विविध प्रकारचे आकार असू शकतात. अशा दिव्यांचे फायदे: इनॅन्डेन्सेंट दिव्यांच्या तुलनेत कमी ऊर्जेचा वापर, दिवसाची चमक, बेसची मोठी निवड. अशा दिव्यांच्या तोट्यांमध्ये डिझाइनची जटिलता आणि फ्लिकरिंग समाविष्ट आहे. फ्लिकर सहसा लक्षात येत नाही, परंतु प्रकाशामुळे डोळे थकतील.
28.11.2019
केबल असेंब्ली- माउंटिंग युनिटचा एक प्रकार. केबल असेंब्लीमध्ये अनेक स्थानिक असतात, जे इलेक्ट्रिकल इन्स्टॉलेशनच्या दुकानात दोन्ही बाजूंनी बंद केले जातात आणि बंडलमध्ये बांधलेले असतात. केबल मार्गाची स्थापना केबल मार्ग फास्टनिंग डिव्हाइसेसमध्ये केबल असेंब्ली ठेवून चालते (चित्र 1).
जहाज केबल मार्ग- केबल्स (केबल बंडल), केबल रूट फास्टनिंग डिव्हाइसेस, सीलिंग डिव्हाइसेस इ. (चित्र 2) पासून जहाजावर बसवलेली विद्युत लाइन.
जहाजावर, केबल मार्ग हार्ड-टू-पोच ठिकाणी (बाजू, कमाल मर्यादा आणि बल्कहेड्सच्या बाजूने) स्थित आहे; त्यांना तीन विमानांमध्ये सहा वळणे आहेत (चित्र 3). मोठ्या जहाजांवर, केबलची सर्वात लांब लांबी 300 मीटरपर्यंत पोहोचते आणि केबल मार्गाचे जास्तीत जास्त क्रॉस-सेक्शनल क्षेत्र 780 सेमी 2 आहे. एकूण 400 किमी पेक्षा जास्त केबल लांबी असलेल्या वैयक्तिक जहाजांवर, केबल मार्ग सामावून घेण्यासाठी केबल कॉरिडॉर प्रदान केले जातात.
केबल मार्ग आणि त्यांच्यामधून जाणारे केबल्स कॉम्पॅक्शन डिव्हाइसेसच्या अनुपस्थितीवर (उपस्थिती) अवलंबून स्थानिक आणि मुख्य मध्ये विभागले जातात.
ट्रंक केबल मार्ग केबल बॉक्सच्या वापराच्या प्रकारानुसार, एंड आणि फीड-थ्रू बॉक्ससह मार्गांमध्ये विभागले जातात. तांत्रिक उपकरणे आणि केबल मार्ग स्थापना तंत्रज्ञानाच्या निवडीसाठी हे अर्थपूर्ण आहे.
21.11.2019
इन्स्ट्रुमेंटेशन आणि कंट्रोल डिव्हाइसेसच्या विकास आणि उत्पादनाच्या क्षेत्रात, अमेरिकन कंपनी फ्ल्यूक कॉर्पोरेशन जगातील अग्रगण्य स्थानांवर आहे. याची स्थापना 1948 मध्ये झाली होती आणि तेव्हापासून ते निदान, चाचणी आणि विश्लेषणाच्या क्षेत्रात सतत तंत्रज्ञान विकसित आणि सुधारत आहे.
अमेरिकन विकसकाकडून नवकल्पना
बहुराष्ट्रीय कॉर्पोरेशनच्या व्यावसायिक मापन उपकरणांचा वापर हीटिंग, एअर कंडिशनिंग आणि वेंटिलेशन सिस्टम, रेफ्रिजरेशन युनिट्स, हवेची गुणवत्ता तपासण्यासाठी आणि इलेक्ट्रिकल पॅरामीटर्स कॅलिब्रेट करण्यासाठी केला जातो. Fluke ब्रँड स्टोअर अमेरिकन विकसकाकडून प्रमाणित उपकरणे खरेदी करण्याची ऑफर देते. संपूर्ण श्रेणीमध्ये हे समाविष्ट आहे:- थर्मल इमेजर, इन्सुलेशन रेझिस्टन्स टेस्टर्स;
- डिजिटल मल्टीमीटर;
- विद्युत ऊर्जा गुणवत्ता विश्लेषक;
- रेंजफाइंडर, कंपन मीटर, ऑसिलोस्कोप;
- तापमान, दाब कॅलिब्रेटर आणि मल्टीफंक्शनल उपकरणे;
- व्हिज्युअल पायरोमीटर आणि थर्मामीटर.
07.11.2019
ओपन आणि बंद स्टोरेज सुविधा आणि जहाजांमधील विविध प्रकारच्या द्रवांची पातळी निर्धारित करण्यासाठी लेव्हल गेजचा वापर केला जातो. एखाद्या पदार्थाची पातळी किंवा त्यापासूनचे अंतर मोजण्यासाठी याचा वापर केला जातो.
द्रव पातळी मोजण्यासाठी, सेन्सर वापरले जातात जे प्रकारात भिन्न असतात: रडार लेव्हल गेज, मायक्रोवेव्ह (किंवा वेव्हगाइड), रेडिएशन, इलेक्ट्रिकल (किंवा कॅपेसिटिव्ह), यांत्रिक, हायड्रोस्टॅटिक, ध्वनिक.
रडार लेव्हल मीटरच्या ऑपरेशनची तत्त्वे आणि वैशिष्ट्ये
मानक उपकरणे रासायनिक आक्रमक द्रव्यांची पातळी निर्धारित करू शकत नाहीत. केवळ रडार लेव्हल गेज हे मोजण्यास सक्षम आहे, कारण ऑपरेशन दरम्यान ते द्रवाच्या संपर्कात येत नाही. याव्यतिरिक्त, रडार पातळी गेज अधिक अचूक आहेत, उदाहरणार्थ, अल्ट्रासोनिक किंवा कॅपेसिटिव्हच्या तुलनेत.जेव्हा मोटरने विकसित केलेला टॉर्क ॲक्ट्युएटरच्या प्रतिकार क्षणाप्रमाणे असतो, तेव्हा ड्राइव्हचा वेग स्थिर असतो.
तथापि, बर्याच प्रकरणांमध्ये ड्राइव्हचा वेग वाढतो किंवा कमी होतो, म्हणजे. क्षणिक मोडमध्ये कार्य करते.
संक्रमणकालीनएका स्थिर स्थितीतून दुस-या संक्रमणादरम्यान, वेग, टॉर्क आणि वर्तमान बदलताना इलेक्ट्रिक ड्राइव्ह मोड हा ऑपरेटिंग मोड आहे.
इलेक्ट्रिक ड्राईव्हमध्ये क्षणिक मोड उद्भवण्याची कारणे म्हणजे उत्पादन प्रक्रियेशी संबंधित लोडमधील बदल किंवा ते नियंत्रित करताना इलेक्ट्रिक ड्राइव्हवर होणारा प्रभाव, म्हणजे. सुरू करणे, ब्रेक लावणे, रोटेशनची दिशा बदलणे इ. तसेच वीज पुरवठा प्रणालीमध्ये व्यत्यय.
इलेक्ट्रिक ड्राइव्हच्या गतीचे समीकरण क्षणिक मोडमध्ये कार्य करणारे सर्व क्षण विचारात घेणे आवश्यक आहे.
सर्वसाधारणपणे, इलेक्ट्रिक ड्राइव्हच्या गतीचे समीकरण खालीलप्रमाणे लिहिले जाऊ शकते:
सकारात्मक वेगाने, इलेक्ट्रिक ड्राइव्हच्या गतीचे समीकरण फॉर्म आहे
. (2.10)
समीकरण (2.10) दर्शविते की इंजिनद्वारे विकसित टॉर्क प्रतिरोधक टॉर्क आणि डायनॅमिक टॉर्कद्वारे संतुलित आहे. समीकरण (2.9) आणि (2.10) मध्ये, असे गृहीत धरले जाते की ड्राइव्हच्या जडत्वाचा क्षण स्थिर असतो, जो लक्षणीय संख्येच्या ॲक्ट्युएटरसाठी सत्य आहे.
समीकरणाच्या (2.10) विश्लेषणावरून हे स्पष्ट होते:
1) येथे > , , म्हणजे ड्राइव्ह प्रवेग होतो;
2) केव्हा < , , म्हणजे ड्राइव्ह मंदावते (स्पष्टपणे, मोटर टॉर्क नकारात्मक असला तरीही ड्राइव्हचा वेग कमी होतो);
3) केव्हा = , ; या प्रकरणात ड्राइव्ह स्थिर स्थितीत कार्य करते.
डायनॅमिक क्षण(टॉर्क समीकरणाची उजवी बाजू) जेव्हा ड्राइव्हचा वेग बदलतो तेव्हाच क्षणिक मोडमध्ये दिसून येतो. जेव्हा ड्राइव्हचा वेग वाढतो, तेव्हा हा टॉर्क चळवळीच्या विरूद्ध निर्देशित केला जातो आणि ब्रेकिंग करताना ते चळवळीला समर्थन देते.
२.५. स्थिर हालचाल आणि स्थिरता
इलेक्ट्रिक ड्राइव्हची स्थिर हालचाल
इंजिन आणि एक्झिक्युटिव्ह बॉडीची यांत्रिक वैशिष्ट्ये असल्याने, स्थिर-स्थिती गती स्थितीची व्यवहार्यता निश्चित करणे कठीण नाही. हे करण्यासाठी, आम्ही ही वैशिष्ट्ये समान चतुर्थांश मध्ये एकत्र करतो. या वैशिष्ट्यांच्या छेदनबिंदूची वस्तुस्थिती इंजिन आणि एक्झिक्युटिव्ह बॉडीच्या संयुक्त ऑपरेशनची शक्यता दर्शवते आणि त्यांच्या छेदनबिंदूचा बिंदू स्थिर गतीचा बिंदू आहे, कारण या टप्प्यावर आणि .
आकृती 2.4 पंखा (वक्र 1) आणि स्वतंत्र उत्तेजना मोटर (सरळ रेषा 2) ची यांत्रिक वैशिष्ट्ये दर्शविते. पॉइंट A हा स्थिर गतीचा बिंदू आहे आणि त्याचे निर्देशांक पंखाच्या स्थिर गतीचे निर्देशांक आहेत.
तांदूळ. २.४. स्थिर गती पॅरामीटर्सचे निर्धारण
स्थिर-स्थिती गतीचे पूर्णपणे विश्लेषण करण्यासाठी, गती स्थिर आहे की नाही हे निर्धारित करणे आवश्यक आहे. शाश्वतअशी स्थिर गती असेल की, काही बाह्य गडबडीने स्थिर स्थितीतून काढून टाकल्यावर, अशांतता गायब झाल्यानंतर या मोडमध्ये परत येईल.
गती स्थिरता निश्चित करण्यासाठी, यांत्रिक वैशिष्ट्ये वापरणे सोयीचे आहे.
आवश्यक आणि पुरेशी स्थिरता स्थितीस्थिर गती हे गती वाढीचे आणि परिणामी डायनॅमिक टॉर्कचे उलट चिन्ह आहे, म्हणजे.
चला, उदाहरण म्हणून (चित्र 2.5) इलेक्ट्रिक ड्राइव्हच्या हालचालीची स्थिरता तपासूया. स्थिर-स्थिती गती दोन वेगाने शक्य आहे: बिंदू 1 आणि बिंदू 2 वर, ज्यावर . दोन्ही बिंदूंवर गती स्थिर आहे की नाही हे ठरवू.
तांदूळ. २.५. यांत्रिक गती स्थिरतेचे निर्धारण
डॉट 1. आपण असे गृहीत धरू की अल्प-मुदतीच्या व्यत्ययाच्या प्रभावाखाली गती मूल्यापर्यंत वाढली, ज्यानंतर व्यत्यय नाहीसा झाला. एडीच्या यांत्रिक वैशिष्ट्यांनुसार, वेग टॉर्कशी संबंधित असेल.
याचा परिणाम म्हणून, डायनॅमिक टॉर्क = नकारात्मक होईल, आणि ड्राइव्ह ज्या वेगाने ब्रेक करण्यास सुरवात करेल.
जर व्यत्ययामुळे मूल्याचा वेग कमी झाला, तर
रक्तदाब मूल्य, डायनॅमिक टॉर्क वाढेल
= सकारात्मक होईल आणि गती त्याच्या मागील मूल्यापर्यंत वाढेल. अशा प्रकारे, बिंदू 1 वर गतीसह हालचाल स्थिर आहे.
तत्सम विश्लेषण करताना, असा निष्कर्ष काढला जाऊ शकतो की इलेक्ट्रिक ड्राइव्हची हालचाल अस्थिर आहे बिंदू 2 वेगाने.
स्थिरता किंवा अस्थिरतामोटर आणि कार्यकारी मंडळाच्या यांत्रिक वैशिष्ट्यांच्या कडकपणाच्या संकल्पनेचा वापर करून हालचाली विश्लेषणात्मकपणे निर्धारित केल्या जाऊ शकतात: . स्थिरता स्थिती:
किंवा . (२.१२)
विचाराधीन उदाहरणासाठी, म्हणून, स्थिरता IM वैशिष्ट्याच्या कडकपणाच्या चिन्हाद्वारे निर्धारित केली जाते: साठी गुण 1 चळवळ स्थिर आहे, परंतु साठी गुण 2 आणि चळवळ अस्थिर आहे.
लक्षात घ्या की, समीकरण (2.10) नुसार, विशिष्ट कडकपणावर, इलेक्ट्रिक ड्राइव्हचे स्थिर ऑपरेशन IM च्या यांत्रिक वैशिष्ट्यांच्या सकारात्मक कडकपणासह देखील शक्य आहे, विशेषतः, तथाकथित नॉन-वर्किंग विभागात. IM वैशिष्ट्य.
२.६. इलेक्ट्रिक ड्राइव्हची अस्थिर हालचाल
सतत डायनॅमिक टॉर्कवर
अस्थिरइलेक्ट्रिक ड्राइव्हची यांत्रिक हालचाल सर्व प्रकरणांमध्ये उद्भवते जेव्हा मोटर टॉर्क लोड टॉर्कपेक्षा भिन्न असतो, म्हणजे. कधी .
इलेक्ट्रिक ड्राइव्हच्या अस्थिर गतीचा विचार करणे हे त्याचे मुख्य लक्ष्य आहे इलेक्ट्रिक ड्राइव्हच्या आउटपुट मेकॅनिकल कोऑर्डिनेट्स - टॉर्क, मोटर शाफ्टची गती आणि स्थितीची वेळ अवलंबित्व प्राप्त करणे. याव्यतिरिक्त, इलेक्ट्रिक मोटरच्या अस्थिर गतीची (क्षणिक प्रक्रिया) वेळ निश्चित करणे आवश्यक असते. लक्षात घ्या की मोटर टॉर्क आणि भार बदलण्याचे कायदे प्रीसेट असणे आवश्यक आहे.
इलेक्ट्रिक मोटर सुरू करताना स्थिर गतिमान टॉर्कवर अस्थिर गतीचा विचार करूया. असे गृहीत धरले जाते की इलेक्ट्रिक मोटरच्या प्रारंभादरम्यान आणि , परंतु .
इलेक्ट्रिक ड्राइव्हच्या यांत्रिक गतीचे समीकरण सोडवून, आम्हाला खालील अवलंबित्व प्राप्त होते:
; (2.13)
समीकरण (2.14) समानता आणि .
गृहीत धरून आणि समीकरण (2.13) मध्ये, आम्हाला ते पासून वेग बदलण्याची वेळ सापडते
. (2.15)
वैशिष्ट्ये, , आकृती 2.6 मध्ये सादर केली आहेत.
तांदूळ. २.६. वैशिष्ट्ये,
इलेक्ट्रिक मोटर सुरू करताना
समीकरण (2.13), (2.14) आणि (2.15) मध्ये, इंजिन सुरू करताना टॉर्क सरासरी टॉर्कच्या बरोबरीने गृहीत धरला जातो, म्हणून वर प्राप्त केलेले विश्लेषणात्मक संबंध केवळ इलेक्ट्रिक ड्राइव्हमध्ये विविध अंदाजे गणना करताना वापरले जातात. विशेषतः, इलेक्ट्रिक ड्राइव्हच्या ब्रेकिंग आणि रिव्हर्सिंग दरम्यान किंवा एका वैशिष्ट्यापासून दुस-यामध्ये संक्रमण दरम्यान अस्थिर गतीचा विचार केला जाऊ शकतो.
२.७. इलेक्ट्रिक ड्राइव्हची अस्थिर हालचाल
इंजिन टॉर्कच्या रेखीय अवलंबनासह
आणि कार्यकारी मंडळ वेगाने
प्रश्नातील हालचालीचा प्रकार अतिशय सामान्य आहे.
आकृती 2.7 इलेक्ट्रिक मोटर सुरू करताना EM आणि IO ची यांत्रिक वैशिष्ट्ये दर्शविते.
तांदूळ. २.७. इलेक्ट्रिक मोटर सुरू करताना EM आणि IO ची यांत्रिक वैशिष्ट्ये
ED आणि IO ची यांत्रिक वैशिष्ट्ये खालील समीकरणांद्वारे विश्लेषणात्मकपणे व्यक्त केली जाऊ शकतात:
समीकरणांमध्ये (2.16) आणि (2.17) आणि ED आणि IO च्या यांत्रिक वैशिष्ट्यांचे कडकपणा गुणांक आहेत.
वरील समीकरणांना इलेक्ट्रिक ड्राईव्हच्या यांत्रिक गतीच्या समीकरणामध्ये बदलून, आम्हाला अवलंबित्वांसाठी खालील समीकरणे मिळतात, , .
ड्राइव्हची यांत्रिक जडत्व लक्षात घेऊन आणि इलेक्ट्रिक ड्राइव्हच्या स्टार्ट-अप वेळेवर परिणाम करणारा इलेक्ट्रोमेकॅनिकल वेळ सेकंदात स्थिर असतो.
परिणामी अभिव्यक्ती (2.18)-(2.20) विविध प्रकारच्या क्षणिक प्रक्रियांचे विश्लेषण करण्यासाठी वापरली जाऊ शकतात, परंतु प्रत्येक विशिष्ट प्रकरणात इलेक्ट्रोमेकॅनिकल वेळ स्थिरांक तसेच निर्देशांकांची प्रारंभिक आणि अंतिम मूल्ये निर्धारित करणे आवश्यक आहे, , , . विशेष बाबतीत, केव्हा आणि , हे प्रमाण सूत्रांद्वारे निर्धारित केले जाऊ शकते:
; (2.21)
; , (2.22)
कोठे आहे ज्या दरम्यान इलेक्ट्रिक ड्राइव्ह वेगाने सुरू होते. मग . इंजिन टॉर्क सहसा स्टार्ट-अप दरम्यान बदलत असल्याने, व्यवहारात काही सेकंदात स्टार्ट-अप वेळ अभिव्यक्तीद्वारे किंवा खालील अभिव्यक्तीद्वारे निर्धारित केला जातो: .
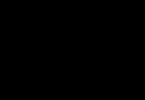
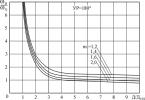
अवलंबित्व आकृती 2.8 मध्ये दर्शविले आहे.
तांदूळ. २.८. अवलंबित्व
इलेक्ट्रिक मोटर सुरू करताना
२.८. इलेक्ट्रिक ड्राइव्हची अस्थिर हालचाल
डायनॅमिक टॉर्कच्या अनियंत्रित अवलंबनासह
गती पासून
व्याख्या करताना; ; जटिल अवलंबनांसाठी
इंजिन टॉर्क आणि रेझिस्टन्स टॉर्क विरुद्ध वेग, संख्यात्मक वापरा युलरची पद्धत.त्याचे सार असे आहे की इलेक्ट्रिक ड्राइव्हच्या गतीच्या समीकरणामध्ये, व्हेरिएबल्सचे भिन्नता लहान वाढीद्वारे बदलले जातात.
आणि .
एसिंक्रोनस इलेक्ट्रिक मोटरसह सेंट्रीफ्यूगल पंप सुरू करण्याचे उदाहरण वापरून यूलरच्या पद्धतीचा वापर दाखवू या. ईडीची यांत्रिक वैशिष्ट्ये
आणि केंद्रापसारक पंप अंजीर मध्ये दर्शविला आहे. २.९.
तांदूळ. २.९. ED आणि IO ची यांत्रिक वैशिष्ट्ये
1. वेग अक्ष लहान आणि समान विभागांमध्ये विभागलेला आहे ∆ ω.
2. प्रत्येक विभागात, सरासरी क्षण निर्धारित केले जातात, इ. इ.
3. नंतर तक्ता 2.1 संकलित केला जातो आणि त्यावरून अवलंबित्व निश्चित केले जाते.
तक्ता 2.1
| ω 1 = ∆ω 1 | t 1 = ∆t 1 | ||
| ω 2 =ω 1 +∆ω 2 | t 2 = t 1 +∆t 2 | ||
| ω ३ =ω २ +∆ω ३ | t 3 =t 2 +∆t 3 | ||
| … | … | … | … |
| ωn | एम d n | tn |
; इ. - ED आणि IR चे कोनीय वेग; .
ट्रान्समिशन किंवा मॅन्युअल सीव्हीटी अवजड (जटिल) असू शकतात. त्यांच्या वापरामुळे इलेक्ट्रिक ड्राइव्हची विश्वसनीयता आणि कार्यक्षमता कमी होते. म्हणून, सराव मध्ये, इलेक्ट्रिकल कंट्रोल पद्धत प्रामुख्याने वापरली जाते, इलेक्ट्रिक मोटर किंवा पॉवर स्त्रोताच्या पॅरामीटर्सवर प्रभाव टाकते. या पद्धतीमध्ये सर्वोत्तम तांत्रिक आणि आर्थिक निर्देशक आहेत. तथापि, काही मेटलवर्किंग मशीनवर मिश्रित नियंत्रण पद्धत वापरली जाते.
सिद्धांतामध्येइलेक्ट्रिक ड्राइव्ह मेकॅनिकल, इलेक्ट्रिकल आणि मॅग्नेटिक व्हेरिएबल्स मोटरच्या ऑपरेशनचे वैशिष्ट्य - वेग, प्रवेग, शाफ्ट पोझिशन, टॉर्क, करंट, चुंबकीय प्रवाह इ. - अनेकदा कॉल करा समन्वय. म्हणून कार्यकारी मंडळाच्या हालचालींवर विद्युतीय नियंत्रणनियमन द्वारे केले जाते निर्देशांक (चल)विद्युत मोटर.
हे लक्षात घेणे महत्वाचे आहे की कार्यकारी मंडळाच्या स्थिर आणि अस्थिर हालचालींवर नियंत्रण ठेवण्यासाठी इलेक्ट्रिक ड्राइव्हच्या निर्देशांकांचे नियमन करणे आवश्यक आहे.
व्हेरिएबल्सचे नियमन करण्याचे एक सामान्य उदाहरण म्हणजे पॅसेंजर लिफ्टचे इलेक्ट्रिक ड्राइव्ह.केबिन सुरू करताना आणि थांबवताना, प्रवाशांच्या आरामाची खात्री करण्यासाठी, त्याच्या हालचालीचा प्रवेग आणि मंदता परवानगी असलेल्या पातळीपेक्षा जास्त नसावी. थांबण्यापूर्वी, केबिनची गती कमी करणे आवश्यक आहे, म्हणजे. त्याचे नियमन करणे आवश्यक आहे. आणि शेवटी, केबिनने दिलेल्या अचूकतेसह आवश्यक मजल्यावर थांबणे आवश्यक आहे, म्हणजे. लिफ्ट कारची निर्दिष्ट स्थिती (स्थिती) सुनिश्चित करणे आवश्यक आहे.
विचारात घेतलेल्या उदाहरणाचा वापर करून, आम्ही हे महत्त्वाचे तथ्य लक्षात घेतो की बऱ्याचदा इलेक्ट्रिक ड्राइव्हने एकाच वेळी अनेक निर्देशांकांचे नियंत्रण प्रदान केले पाहिजे: वेग, प्रवेग आणि कार्यकारी मंडळाची स्थिती.
कागद, फॅब्रिक्स, केबल उत्पादने, विविध चित्रपट आणि रोलिंग धातू तयार करताना, या सामग्रीचा एक विशिष्ट ताण सुनिश्चित करणे आवश्यक आहे, जे ईडी वापरून देखील केले जाते. इतर अनेक कार्यरत मशीन्स आणि यंत्रणांना देखील समन्वय समायोजन आवश्यक आहे: क्रेन, मेटलवर्किंग मशीन, कन्व्हेयर, पंपिंग युनिट्स, रोबोट्स आणि मॅनिपुलेटर इ.
इलेक्ट्रिक ड्राईव्हचा यांत्रिक भाग घन शरीरांची एक प्रणाली आहे, ज्याची हालचाल शरीरांमधील यांत्रिक कनेक्शनद्वारे निर्धारित केली जाते. जर वैयक्तिक घटकांच्या गतीमधील संबंध निर्दिष्ट केले असतील, तर इलेक्ट्रिक ड्राइव्हच्या गतीचे समीकरण भिन्न स्वरूपाचे आहे. गतीची समीकरणे लिहिण्याचा सर्वात सामान्य प्रकार म्हणजे सामान्यीकृत निर्देशांकातील गतीची समीकरणे (लॅग्रेंज समीकरण):
प- प्रणालीच्या गतीज उर्जेचा साठा, सामान्यीकृत निर्देशांकांच्या संदर्भात व्यक्त केला जातो q iआणि सामान्यीकृत गती;
Qi- कामाच्या बेरजेद्वारे निर्धारित सामान्यीकृत बल δ अ iसंभाव्य विस्थापनावर सर्व क्रियाशील शक्ती.
Lagrange समीकरण दुसर्या स्वरूपात प्रस्तुत केले जाऊ शकते:
![]() (2.20)
(2.20)
येथे एल- लॅग्रेंज फंक्शन, जे प्रणालीच्या गतिज आणि संभाव्य उर्जांमधील फरक आहे:
एल= प – प एन.
समीकरणांची संख्या सिस्टमच्या स्वातंत्र्याच्या अंशांच्या संख्येइतकी असते आणि व्हेरिएबल्सच्या संख्येद्वारे निर्धारित केली जाते - सामान्यीकृत समन्वय जे सिस्टमची स्थिती निर्धारित करतात.
लवचिक प्रणालीसाठी Lagrange समीकरणे लिहूया (चित्र 2.9).
तांदूळ. २.९. दोन-वस्तुमान यांत्रिक भागाचे डिझाइन आकृती.
या प्रकरणात Lagrange फंक्शन फॉर्म आहे
सामान्यीकृत शक्ती निश्चित करण्यासाठी, संभाव्य विस्थापनावर पहिल्या वस्तुमानापर्यंत कमी केलेल्या सर्व क्षणांच्या प्राथमिक कार्याची गणना करणे आवश्यक आहे:
![]()
म्हणून, पासून सामान्यीकृत बल प्राथमिक कार्यांच्या बेरीज δ द्वारे निर्धारित केले जाते ए 1 परिसरात δφ 1 , नंतर आम्हाला मिळणारे मूल्य निर्धारित करण्यासाठी:
त्याचप्रमाणे, व्याख्यासाठी आमच्याकडे आहे:
Lagrange फंक्शनसाठी (2.20) मध्ये अभिव्यक्ती बदलून, आम्हाला मिळते:

नियुक्त केल्यावर ![]() , आम्हाला मिळते:
, आम्हाला मिळते:
 (2.21)
(2.21)
आपण असे गृहीत धरू की प्रथम आणि द्वितीय वस्तुमानांमधील यांत्रिक कनेक्शन पूर्णपणे कठोर आहे, म्हणजे. (अंजीर 2.10).
तांदूळ. २.१०. दुहेरी वस्तुमान कठोर यांत्रिक प्रणाली.
मग सिस्टमचे दुसरे समीकरण फॉर्म घेईल:
![]()
प्रणालीच्या पहिल्या समीकरणात ते बदलून, आम्हाला मिळते:
![]()
![]() (2.22)
(2.22)
या समीकरणाला कधीकधी इलेक्ट्रिक ड्राइव्हसाठी गतीचे मूलभूत समीकरण म्हटले जाते. त्याचा वापर करून, आपण इंजिनचे ज्ञात इलेक्ट्रोमॅग्नेटिक टॉर्क वापरू शकता मी,प्रतिकाराचा क्षण आणि जडत्वाचा एकूण क्षण वापरून, इलेक्ट्रिक ड्राइव्हच्या सरासरी प्रवेग मूल्याचा अंदाज लावा, इंजिन दिलेल्या गतीपर्यंत पोहोचण्याच्या वेळेची गणना करा आणि यांत्रिक प्रणालीमध्ये लवचिक कनेक्शनचा प्रभाव असल्यास इतर समस्या सोडवा. लक्षणीय
क्रँक, रॉकर आणि इतर तत्सम यंत्रणा (चित्र 2.11) सारख्या नॉनलाइनर किनेमॅटिक कनेक्शनसह यांत्रिक प्रणालीचा विचार करूया. त्यातील घट त्रिज्या हे तंत्राच्या स्थितीवर अवलंबून एक चल मूल्य आहे: .

तांदूळ. २.११. नॉनलाइनर किनेमॅटिक कनेक्शनसह यांत्रिक प्रणाली
दोन-वस्तुमान प्रणाली म्हणून विचाराधीन प्रणालीची कल्पना करू या, पहिले वस्तुमान ω गतीने फिरते आणि त्यात जडत्वाचा क्षण असतो आणि दुसरा रेखीय गतीने फिरतो व्हीआणि एकूण वस्तुमान दर्शवते मीघटक कठोरपणे आणि रेखीयपणे यंत्रणेच्या कार्यरत शरीराशी जोडलेले आहेत.
रेषीय गती ω आणि दरम्यान संबंध व्हीअरेखीय आणि . लवचिक जोडणी विचारात न घेता अशा प्रणालीच्या गतीचे समीकरण प्राप्त करण्यासाठी, आम्ही लॅग्रेंज समीकरण (2.19) वापरतो, कोन φ सामान्यीकृत समन्वय म्हणून घेतो. चला सामान्यीकृत शक्ती परिभाषित करूया:
इंजिनला रेखीयपणे जोडलेल्या जनतेवर कार्य करणार्या शक्तींकडून प्रतिकाराचा एकूण क्षण; मोटर शाफ्टकडे नेले;
एफ सी- यंत्रणेच्या कार्यरत शरीरावर लागू केलेल्या सर्व शक्तींचा परिणाम आणि त्यास रेखीयपणे जोडलेले घटक;
- संभाव्य असीम वस्तुमान चळवळ मी.
हे पाहणे कठीण नाही
कास्टिंग त्रिज्या.
मेकॅनिझमच्या स्टॅटिक लोड मोमेंटमध्ये एक स्पंदन करणारा लोड घटक असतो जो रोटेशन कोन φ चे कार्य म्हणून बदलतो:
प्रणाली गतिज ऊर्जा राखीव:
मोटर शाफ्टमध्ये कमी झालेल्या सिस्टमच्या जडत्वाचा एकूण क्षण येथे आहे.
Lagrange समीकरणाची डावी बाजू (2.19) खालीलप्रमाणे लिहिली जाऊ शकते:
अशाप्रकारे, कठोर कमी केलेल्या दुव्याच्या गतीचे समीकरण खालीलप्रमाणे आहे:
![]() (2.23)
(2.23)
हे परिवर्तनीय गुणांकांसह नॉनलाइनर आहे.
कठोर रेखीय यांत्रिक दुव्यासाठी, इलेक्ट्रिक ड्राइव्हच्या स्थिर ऑपरेटिंग मोडचे समीकरण जुळते आणि त्याचे स्वरूप आहे:
हलवत असताना जर ![]() मग एकतर डायनॅमिक क्षणिक प्रक्रिया घडते किंवा वेळोवेळी बदलत्या गतीसह सिस्टमची सक्तीची हालचाल होते.
मग एकतर डायनॅमिक क्षणिक प्रक्रिया घडते किंवा वेळोवेळी बदलत्या गतीसह सिस्टमची सक्तीची हालचाल होते.
नॉनलाइनर किनेमॅटिक कनेक्शनसह यांत्रिक प्रणालींमध्ये, कोणतेही स्थिर ऑपरेटिंग मोड नाहीत. ω=const असल्यास, अशा प्रणालींमध्ये गतीची स्थिर-स्थिती गतिशील प्रक्रिया असते. हे वस्तुस्थितीमुळे आहे की रेखीय रीतीने हलणारे वस्तुमान परस्पर गती करतात आणि त्यांचे वेग आणि प्रवेग हे परिवर्तनशील परिमाण आहेत.
उर्जेच्या दृष्टिकोनातून, इलेक्ट्रिक ड्राइव्हच्या ऑपरेशनच्या मोटर आणि ब्रेकिंग मोडमध्ये फरक केला जातो. मोटर मोड यंत्रणेच्या कार्यरत शरीरात यांत्रिक ऊर्जा प्रसारित करण्याच्या थेट दिशेशी संबंधित आहे. सक्रिय लोड असलेल्या इलेक्ट्रिक ड्राइव्हमध्ये, तसेच इलेक्ट्रिक ड्राइव्हमधील क्षणिक प्रक्रियांमध्ये, जेव्हा यांत्रिक प्रणालीची हालचाल मंदावते, तेव्हा यांत्रिक ऊर्जा यंत्रणेच्या कार्यरत शरीरातून पुन्हा इंजिनमध्ये हस्तांतरित केली जाते.
इलेक्ट्रिक ड्राइव्हच्या यांत्रिक भागाचे डिझाइन आकृती
इलेक्ट्रिक ड्राइव्ह मेकॅनिक्स
इलेक्ट्रिक ड्राइव्ह ही एक इलेक्ट्रोमेकॅनिकल प्रणाली आहे ज्यामध्ये इलेक्ट्रिकल आणि मेकॅनिकल भाग असतात. या प्रकरणात आपण इलेक्ट्रिक ड्राइव्हचा यांत्रिक भाग पाहू.
सर्वसाधारणपणे, इलेक्ट्रिक ड्राइव्हच्या यांत्रिक भागामध्ये इलेक्ट्रोमेकॅनिकल कन्व्हर्टरचा यांत्रिक भाग (इलेक्ट्रिक मोटरचा रोटर किंवा आर्मेचर), यांत्रिक ऊर्जा कनवर्टर (रिड्यूसर किंवा मेकॅनिकल ट्रान्समिशन) आणि कार्यरत मशीनची कार्यकारी संस्था (आयओ) समाविष्ट असते. आरएम). आमचे कार्य IO RM ला गतीमध्ये सेट करणे असल्याने, कार्यरत मशीनची वैशिष्ट्ये आणि ED च्या यांत्रिक भागाची वैशिष्ट्ये इलेक्ट्रिक ड्राइव्हची निवड आणि गणना करण्यासाठी मूलभूत आहेत.
सामान्य स्थितीत, इलेक्ट्रिक ड्राइव्हचा यांत्रिक भाग ही एक जटिल यांत्रिक प्रणाली असते ज्यामध्ये वेगवेगळ्या वेगाने फिरणारे आणि अनुवादितपणे हलणारे दुवे असतात, ज्यामध्ये भिन्न वस्तुमान आणि जडत्वाचे क्षण असतात, लवचिक कनेक्शनद्वारे जोडलेले असतात (कमी किंवा मर्यादित कडकपणाचे). त्याच वेळी, किनेमॅटिक ट्रान्समिशनमध्ये अंतर अनेकदा आढळते.
ही जटिल यांत्रिक प्रणाली बाह्य क्षण आणि वेगवेगळ्या दिशानिर्देश आणि परिमाणांच्या शक्तींद्वारे प्रभावित होते, जी बहुतेक वेळा वेळेवर, यंत्रणेच्या रोटेशनचे कोन, हालचालीची गती आणि इतर घटकांवर अवलंबून असते. ही यांत्रिक प्रणाली इलेक्ट्रिक ड्राइव्हचा अविभाज्य भाग असल्याने, त्याची वैशिष्ट्ये जाणून घेणे आणि अभियांत्रिकी गणनांसाठी पुरेसे अचूक गणितीय वर्णन असणे आवश्यक आहे. इलेक्ट्रिक ड्राईव्हच्या यांत्रिक भागाचे वर्णन सामान्य प्रकरणात व्हेरिएबल गुणांकांसह नॉनलाइनर आंशिक विभेदक समीकरणांच्या प्रणालीद्वारे केले जाते. इलेक्ट्रिक ड्राईव्हच्या यांत्रिक भागाचे वर्णन करण्यासाठी, सर्वात सोयीस्कर मार्ग म्हणजे दुसऱ्या प्रकारची Lagrange समीकरणे वापरणे.
हे लक्षात घेता की यांत्रिक प्रणालीची हालचाल सर्वात मोठी वस्तुमान, सर्वात लहान कडकपणा आणि सर्वात मोठ्या अंतरांद्वारे निर्धारित केली जाते; बऱ्याचदा जटिल यांत्रिक प्रणाली दोन- किंवा तीन-वस्तुमान मॉडेलमध्ये कमी केली जाऊ शकते, जी EP प्रणालीची गणना करताना वापरली जाऊ शकते. (या लवचिक शाफ्ट्स, अचानक डायनॅमिक लोड्सच्या अधीन असलेल्या सिस्टम, अचूक ट्रॅकिंग सिस्टम आहेत).
बहुतेक प्रकरणांमध्ये, यांत्रिक भागामध्ये कठोर कनेक्शनसह अत्यंत कठोर दुवे असतात आणि आम्ही अंतर शून्यावर आणण्याचा प्रयत्न करतो आणि नंतर यांत्रिक भागाचे डिझाइन आकृती ED वर बसवलेल्या सिंगल-मास सिस्टमच्या रूपात सादर करणे शक्य होते. शाफ्ट, जेव्हा आपण यांत्रिक कनेक्शनची लवचिकता आणि हस्तांतरणातील अंतरांकडे दुर्लक्ष करतो. हे मॉडेल अभियांत्रिकी गणनेसाठी मोठ्या प्रमाणावर वापरले जाते.
इलेक्ट्रिक ड्राइव्हच्या यांत्रिक भागाच्या हालचालीचे विश्लेषण करण्यासाठी, वास्तविक किनेमॅटिक आकृतीपासून गणना केलेल्या आकृतीमध्ये एक संक्रमण केले जाते, ज्यामध्ये त्यांच्या कडकपणाच्या हलणार्या घटकांचे वस्तुमान आणि जडत्वाचे क्षण तसेच शक्ती आणि क्षण. या घटकांवर कार्य करणे, समान गतीने कमी केलेल्या समतुल्य मूल्यांद्वारे पुनर्स्थित केले जाते (सामान्यतः ED च्या हालचालीच्या गतीपर्यंत एकूण). इलेक्ट्रिक ड्राइव्हच्या वास्तविक यांत्रिक भागाशी संबंधित डिझाइन योजनेची अट ऊर्जा संवर्धनाच्या कायद्याची पूर्तता आहे.
तांदूळ. २.१. लिफ्टिंग डिव्हाइसचे किनेमॅटिक आकृती
वास्तविक योजना (Fig. 2.1) पासून गणना केलेल्या (Fig. 2.2) पर्यंत संक्रमणास घट म्हणतात. यांत्रिक भागाचे सर्व पॅरामीटर्स ईडी शाफ्टकडे (काही प्रकरणांमध्ये गियरबॉक्स शाफ्टकडे) नेतात.
तांदूळ. २.२. लिफ्टिंग डिव्हाइसचे डिझाइन आकृती
जडत्व आणि वस्तुमानाचे क्षण कमी करणेयांत्रिकी पासून ज्ञात खालील सूत्रे वापरून चालते:
रोटेशनल मोशनसाठी, (2.1)
अनुवादात्मक गतीसाठी, (2.2)
प्रणालीच्या जडत्वाचा एकूण क्षण, (2.3)
इंजिनच्या जडत्वाचा क्षण कोठे आहे, kg∙m2;
– k-th फिरणाऱ्या घटकाच्या जडत्वाचा क्षण, kg∙m 2 ;
- i-th उत्तरोत्तर हलणाऱ्या घटकाचे वस्तुमान, kg;
, – k आणि i घटकांच्या जडत्वाचे कमी झालेले क्षण, kg∙m 2.
गुरुत्वाकर्षणाच्या केंद्रातून जाणाऱ्या अक्षाच्या सापेक्ष शरीराच्या जडत्वाचा क्षण म्हणजे संबंधित कणापासून परिभ्रमणाच्या अक्षापर्यंतच्या अंतराच्या वर्गाने शरीराच्या प्रत्येक प्राथमिक कणाच्या वस्तुमानाच्या उत्पादनांची बेरीज.
कुठे आर जे- जडत्व त्रिज्या
मी के- इंजिन शाफ्ट आणि k-th घटकामधील किनेमॅटिक साखळीचे गियर प्रमाण,
- मोटर शाफ्ट आणि k-th घटकाचा कोनीय वेग, s -1.
मोटर शाफ्ट, m, मध्ये उत्तरोत्तर हलणारे i घटक आणण्याची त्रिज्या कोठे आहे
- उत्तरोत्तर हलणाऱ्या i घटकाच्या हालचालीचा वेग, m/s.
जडत्वाची त्रिज्या म्हणजे रोटेशनच्या अक्षापासूनचे अंतर (गुरुत्वाकर्षणाच्या केंद्रातून जाणारे) ज्यावर समानतेचे समाधान करण्यासाठी प्रश्नातील शरीराचे वस्तुमान एका बिंदूवर केंद्रित केले पाहिजे.
क्षण आणि शक्ती आणणे, मोटर शाफ्टच्या घटकांवर कार्य करणे, खालीलप्रमाणे केले जाते:
पहिला पर्याय: इंजिनमधून कार्यरत मशीनवर उर्जेचे हस्तांतरण
रोटेशनली हलणाऱ्या घटकांसाठी, (2.6)
उत्तरोत्तर हलणाऱ्या घटकांसाठी. (2.7)
दुसरा पर्यायः कार्यरत मशीनमधून इंजिनमध्ये ऊर्जा हस्तांतरित केली जाते
रोटेशनली हलणाऱ्या घटकांसाठी, (2.8)
उत्तरोत्तर हलणाऱ्या घटकांसाठी. (2.9)
या अभिव्यक्तींमध्ये:
- घटक k, N∙m वर कार्य करणारा क्षण;
- i घटक, N वर कार्य करणारी शक्ती;
- कमी झालेला क्षण (समतुल्य), N∙m;
- k आणि i घटक आणि मोटर शाफ्टमधील किनेमॅटिक साखळीची कार्यक्षमता.
वरील गणना योजनांचा वापर करून, यांत्रिक प्रणालीमध्ये पॅरामीटर्स, स्थिरता आणि क्षणिक प्रक्रियांचे स्वरूप निर्धारित केले जाते.
इलेक्ट्रिक ड्राइव्हची गतिशीलता, एक नियम म्हणून, ड्राइव्हच्या यांत्रिक भागाद्वारे निर्धारित केली जाते कारण ती अधिक जडत्व असते. क्षणिक मोडचे वर्णन करण्यासाठी, इलेक्ट्रिक ड्राइव्हसाठी गतीचे समीकरण तयार करणे आवश्यक आहे जे क्षणिक मोडमध्ये कार्य करणारी सर्व शक्ती आणि क्षण विचारात घेते.
यंत्रांच्या गतीची समीकरणे तयार करण्याची सर्वात सोयीची पद्धत म्हणजे दुसऱ्या प्रकारची Lagrange समीकरणांची पद्धत. गतीच्या समीकरणाची जटिलता आम्ही निवडलेल्या ड्राइव्हच्या यांत्रिक भागाच्या कोणत्या डिझाइन योजनेवर अवलंबून असेल. बहुतेक व्यावहारिक प्रकरणांमध्ये, एकल-वस्तुमान डिझाइन योजना निवडली जाते, ज्यामुळे संपूर्ण इलेक्ट्रिक मोटर-वर्किंग मशीन (ईएम-आरएम) सिस्टमला कठोर कमी यांत्रिक लिंकवर कमी केले जाते.
सिंगल-मास सिस्टम (कठोर कमी केलेला दुवा) एक एकीकृत दुवा आहे. अशा परिस्थितीत जेव्हा इलेक्ट्रिक ड्राईव्हच्या किनेमॅटिक साखळीमध्ये नॉनलाइनर कनेक्शन असतात, ज्याचे पॅरामीटर्स यंत्रणेच्या वैयक्तिक लिंक्सच्या स्थितीवर अवलंबून असतात (क्रँकच्या जोड्या - कनेक्टिंग रॉड, रॉकर मेकॅनिझम इ.), एकाच हालचाली -द्रव्यमान प्रणालीचे वर्णन वेरियेबल गुणांकांसह नॉनलाइनर डिफरेंशियल समीकरणाद्वारे केले जाते. सामान्य प्रकरणात या समीकरणामध्ये समाविष्ट केलेले क्षण अनेक चलांचे कार्य असू शकतात (वेळ, गती, रोटेशनचा कोन).
ब्लॉक आकृतीवरून खालीलप्रमाणे, मोटर टॉर्क ही एक नियंत्रण क्रिया आहे आणि प्रतिकार क्षण ही एक त्रासदायक क्रिया आहे.
मोटर टॉर्क आणि प्रतिरोधक टॉर्कची बेरीज. काही प्रकरणांमध्ये, मोटर टॉर्क, तसेच प्रतिरोधक टॉर्क, रोटरच्या हालचालीच्या दिशेने आणि या हालचालीच्या विरूद्ध दोन्ही दिशेने निर्देशित केले जाऊ शकते. तथापि, सर्व प्रकरणांमध्ये, मोटर टॉर्क आणि प्रतिरोधक टॉर्कच्या ड्रायव्हिंग किंवा ब्रेकिंग स्वरूपाकडे दुर्लक्ष करून, इलेक्ट्रिक ड्राइव्हच्या कार्यांमध्ये, परिणामी टॉर्कचे तंतोतंत सूचित घटक वेगळे केले जातात. नंतरचे हे निश्चित केले जाते की बहुतेकदा प्रतिकार टॉर्क आगाऊ निर्दिष्ट केला जातो आणि मोटर टॉर्क गणना प्रक्रियेदरम्यान प्रकट होतो आणि त्याच्या विंडिंग्समधील वर्तमान मूल्यांशी जवळून संबंधित असतो, ज्यामुळे हीटिंगचा अंदाज लावणे शक्य होते. मोटर च्या.
इलेक्ट्रिक ड्राइव्ह सिस्टममध्ये, इलेक्ट्रिक मशीनचा मुख्य ऑपरेटिंग मोड मोटर आहे. या प्रकरणात, रोटरच्या हालचालीशी संबंधित प्रतिकाराच्या क्षणात ब्रेकिंग वर्ण असतो आणि इंजिन टॉर्कच्या दिशेने कार्य करतो. म्हणून, प्रतिकाराच्या क्षणाची सकारात्मक दिशा इंजिनच्या क्षणाच्या सकारात्मक दिशेच्या विरुद्ध घेतली जाते, परिणामी समीकरण (2.8) जे = const असे दर्शविले जाऊ शकते:
समीकरण (2.9) याला इलेक्ट्रिक ड्राइव्हच्या गतीचे मूलभूत समीकरण म्हणतात. समीकरणात (2.9), क्षण बीजगणितीय असतात आणि वेक्टर प्रमाण नसतात, कारण दोन्ही क्षण एम आणि रोटेशनच्या समान अक्षाशी संबंधित क्रिया.
![]()
रोटेशनल मोशन दरम्यान कोनीय प्रवेग कोठे आहे.
समीकरणाच्या उजव्या बाजूस (2.9) डायनॅमिक मोमेंट (), म्हणजे.
(2.10) वरून असे दिसून येते की डायनॅमिक टॉर्कची दिशा नेहमी इलेक्ट्रिक ड्राइव्हच्या प्रवेगच्या दिशेशी जुळते.
डायनॅमिक टॉर्कच्या चिन्हावर अवलंबून, इलेक्ट्रिक ड्राइव्हचे खालील ऑपरेटिंग मोड वेगळे केले जातात:
इंजिनने विकसित केलेले टॉर्क हे स्थिर मूल्य नसते, परंतु कोणत्याही एका व्हेरिएबलचे कार्य असते आणि काही प्रकरणांमध्ये अनेक व्हेरिएबल असतात. हे कार्य त्याच्या बदलाच्या सर्व संभाव्य क्षेत्रांसाठी विश्लेषणात्मक किंवा ग्राफिकरित्या निर्दिष्ट केले आहे. प्रतिकाराचा क्षण कोणत्याही व्हेरिएबलचे कार्य देखील असू शकते: वेग, मार्ग, वेळ. ऐवजी गतीच्या समीकरणामध्ये बदल एम आणि त्यांच्या फंक्शन्सचे L/s सामान्य केसमध्ये नॉनलाइनर डिफरन्शियल समीकरणाकडे घेऊन जातात.
विभेदक स्वरूपातील गतीचे समीकरण (2.9) फिरणाऱ्या वस्तुमानाच्या स्थिर त्रिज्यासाठी वैध आहे. काही प्रकरणांमध्ये, उदाहरणार्थ, क्रँक यंत्रणेच्या उपस्थितीत (चित्र 2.2, d पहा), ड्राइव्हच्या किनेमॅटिक साखळीमध्ये, जडत्वाची त्रिज्या रोटेशनच्या कोनाचे नियतकालिक कार्य बनते. या प्रकरणात, आपण प्रणालीमधील गतिज उर्जेच्या संतुलनावर आधारित, गतीचे समीकरण लिहिण्याचा अविभाज्य प्रकार वापरू शकता:
![]() (2.11)
(2.11)
कुठे जे((o !/2) - वेळेत विचारात घेतलेल्या क्षणासाठी ड्राइव्हच्या गतीज उर्जेचा राखीव; 7,(0)^,/2) - ड्राइव्हच्या गतीज उर्जेचा प्रारंभिक राखीव.
7 हे रोटेशन अँगलचे कार्य आहे हे लक्षात घेऊन वेळेच्या संदर्भात भिन्नता समीकरण (2.11)<р, получаем:
![]() (2.12)
(2.12)
पासून , नंतर कोनीय वेगाने (2.12) भागणे<о, получим уравнение движения при 7 =जे[
![]() (2.13)
(2.13)
काही प्रकरणांमध्ये, प्रॉडक्शन मशीनच्या कार्यरत शरीरावरील हालचालींचा विचार करणे उचित आहे (अशा समस्या बऱ्याचदा उत्तरोत्तर हलणाऱ्या कार्यरत शरीरासह उचलणे आणि वाहतूक मशीनसाठी उद्भवतात). या प्रकरणात, भाषांतरित गतीसाठी समीकरणे वापरली पाहिजेत. ट्रान्सलेशनल मोशनसाठी इलेक्ट्रिक ड्राइव्हच्या गतीचे समीकरण रोटेशनल मोशन प्रमाणेच प्राप्त केले जाते. मग कधी ट = const गतीचे समीकरण असे फॉर्म घेते:
येथे t = f)