![]() कंपनीद्वारे उत्पादित अर्धसंवाहक घटकांची श्रेणी टेक्सास इन्स्ट्रुमेंट्सड्रायव्हर ICs सर्व प्रकारच्या नियंत्रित करण्यासाठी मोठ्या प्रमाणावर सादर केले जातात इलेक्ट्रिक मोटर्स, जे सुधारित केले जात आहे, विविध प्रकारच्या उपकरणांमध्ये वाढत्या प्रमाणात वापरले जात आहे. कंपनी विश्वासार्ह आणि सोयीस्कर ऑपरेशन प्रदान करून, प्रवाह आणि व्होल्टेजच्या विस्तृत श्रेणीमध्ये कार्यरत ड्राइव्ह तयार करण्यासाठी उपाय ऑफर करते. कलेक्टर,ब्रश रहितआणि स्टेपर मोटर्सकरंट, व्होल्टेज आणि तापमानासाठी संरक्षणाच्या संपूर्ण श्रेणीसह.
कंपनीद्वारे उत्पादित अर्धसंवाहक घटकांची श्रेणी टेक्सास इन्स्ट्रुमेंट्सड्रायव्हर ICs सर्व प्रकारच्या नियंत्रित करण्यासाठी मोठ्या प्रमाणावर सादर केले जातात इलेक्ट्रिक मोटर्स, जे सुधारित केले जात आहे, विविध प्रकारच्या उपकरणांमध्ये वाढत्या प्रमाणात वापरले जात आहे. कंपनी विश्वासार्ह आणि सोयीस्कर ऑपरेशन प्रदान करून, प्रवाह आणि व्होल्टेजच्या विस्तृत श्रेणीमध्ये कार्यरत ड्राइव्ह तयार करण्यासाठी उपाय ऑफर करते. कलेक्टर,ब्रश रहितआणि स्टेपर मोटर्सकरंट, व्होल्टेज आणि तापमानासाठी संरक्षणाच्या संपूर्ण श्रेणीसह.
आजच्या हाय-टेक जीवनशैलीमध्ये इलेक्ट्रिक मोटर्सला सर्वात विस्तृत अनुप्रयोग सापडतो. या प्रकारचे इलेक्ट्रोमेकॅनिकल ड्राइव्ह अजूनही सर्वात सामान्य आणि मागणीत आहे. विविध उद्देशांसाठी इलेक्ट्रिक मोटर्स कोणत्याही उत्पादनाच्या मुख्य घटकांपैकी एक आहेत, ते कार्यालय आणि घरगुती उपकरणे, इमारती आणि सुविधांसाठी देखरेख आणि नियंत्रण प्रणालींमध्ये मोठ्या प्रमाणावर वापरले जातात. आधुनिक वाहतुकीमध्ये इलेक्ट्रिक मोटरचा मोठ्या प्रमाणावर वापर केला जातो. इलेक्ट्रिक वाहने आणि रोबोट्समधील इलेक्ट्रिक मोटर्ससाठी आणखी रोमांचक भविष्य समोर आहे.
तंत्रज्ञानाच्या विकासासह, पारंपारिक इंजिन सुधारित केले जात आहेत आणि अधिकाधिक नवीन अनुप्रयोग शोधत आहेत. आधुनिक उच्च-परिशुद्धता मशीन टूल्स आणि रोबोटिक्स बुद्धिमान नियंत्रण प्रणालीसह इलेक्ट्रिक मोटर्सशिवाय अकल्पनीय आहेत. जमिनीवर, हवेत आणि पाण्याखाली, इलेक्ट्रिक मोटर्स विद्युत ऊर्जेचे यांत्रिक उर्जेमध्ये मोठ्या प्रमाणावर मागणी केलेले रूपांतरक राहतात.
इलेक्ट्रिक मोटर्सचे प्रकार, नियंत्रण पद्धती आणि आलेल्या अडचणी
रशियन शास्त्रज्ञ जेकोबी यांनी 1834 मध्ये प्रथम तयार केले, विद्युत ऊर्जेचे परिवर्तक रोटेशनल मोशनमध्ये इलेक्ट्रिक मोटर असे म्हणतात. तेव्हापासून, ते गंभीरपणे सुधारले गेले आहे - बरेच नवीन पर्याय दिसू लागले आहेत, परंतु त्याच्या निर्मितीमध्ये वापरल्या जाणार्या इलेक्ट्रोमॅग्नेटिझमची तत्त्वे अजूनही आधुनिक इलेक्ट्रिक मोटर्सच्या सर्व बदलांचा आधार आहेत.
विद्युत प्रवाह असलेला कंडक्टर (आकृती 1) स्वतःभोवती एक चुंबकीय क्षेत्र तयार करतो, ज्याची तीव्रता (चुंबकीय प्रेरण) वळणांच्या संख्येच्या प्रमाणात असते, कॉइल (N) वापरण्याच्या बाबतीत आणि त्याची परिमाण त्यातून जाणारा विद्युतप्रवाह (I), जिथे, B हे चुंबकीय क्षेत्र वेक्टर इंडक्शन आहे, K हे चुंबकीय स्थिरांक आहे, N ही वळणांची संख्या आहे, I वर्तमान ताकद आहे.

प्रवाहाची दिशा बदलल्याने कंडक्टरच्या चुंबकीय क्षेत्राच्या दिशेवरही परिणाम होतो.
या प्रकरणात, लॉरेन्ट्झ बल बाह्य चुंबकीय क्षेत्रात ठेवलेल्या विद्युत्-वाहक कंडक्टरवर कार्य करते, ज्यामुळे त्याची घूर्णन हालचाल होते. चुंबकीय क्षेत्रामध्ये विद्युत प्रवाह वाहून नेणाऱ्या कंडक्टरसाठी सुप्रसिद्ध उजव्या हाताच्या नियमाचा वापर करून रोटेशनची दिशा सहजपणे निर्धारित केली जाते (आकृती 2). चुंबकीय क्षेत्रामध्ये कंडक्टरवर कार्य करणारी शक्ती (F) कंडक्टरमधील वर्तमान ताकद (I) आणि फील्ड मॅग्नेटिक इंडक्शन वेक्टर (B) आणि कंडक्टर (L) च्या लांबीच्या गुणानुरूप असते. F=LIB.

कलेक्टर मोटर्स
डीसी ब्रश्ड डीसी मोटर्स (ब्रशड डीसी किंवा बीडीसी, टीआय परिभाषेत) आज सर्वात सामान्य इलेक्ट्रोमॅग्नेटिक रोटेशन यंत्रणा आहेत.
स्थायी चुंबकापासून एकत्र केलेल्या स्टेटरच्या चुंबकीय क्षेत्रामध्ये, कॉइल्ससह एक बहु-विभाग रोटर फिरतो, जो जोड्यांमध्ये आणि वैकल्पिकरित्या रोटरच्या अक्षावर कम्युटेड कलेक्टर लॅमेलाद्वारे जोडलेला असतो (आकृती 3). सक्रिय कॉइलच्या जोडीची निवड Gimlet नियमानुसार लॉरेंट्झ कायद्याच्या आधारे केली जाते. वर्तमान स्त्रोत नेहमी कॉइलशी जोडलेला असतो ज्यांच्या चुंबकीय क्षेत्र रेषा स्टेटर चुंबकीय क्षेत्राच्या सापेक्ष 90° च्या जवळच्या कोनाद्वारे हलविल्या जातात.

या प्रकारच्या इलेक्ट्रिक मोटर्स बहुतेकदा कायम चुंबक स्टेटर वापरतात. ते आपल्याला रोटेशनची गती सहजपणे समायोजित करण्याची परवानगी देतात आणि महाग नाहीत.
समान प्रकारच्या 2-विंडिंग इलेक्ट्रिक मोटरचा एक प्रकार देखील मोठ्या प्रमाणात वापरला जातो, परंतु स्थायी चुंबकाऐवजी स्टेटर विंडिंगसह. अशा मॉडेल्समध्ये एक मोठा प्रारंभिक टॉर्क असतो आणि ते केवळ थेटच नव्हे तर वैकल्पिक प्रवाहावर देखील कार्य करू शकतात. या प्रकारच्या इलेक्ट्रिक मोटर्स विविध घरगुती उपकरणांमध्ये जवळजवळ सर्वत्र वापरल्या जातात.
या BDC डिझाइनच्या तोट्यांमध्ये ऑपरेशन दरम्यान ब्रश-कलेक्टर असेंब्लीचा पोशाख समाविष्ट आहे. याव्यतिरिक्त, वैयक्तिक रोटर विंडिंग्सच्या स्विचिंग दरम्यान स्पार्किंगमुळे, इलेक्ट्रोमॅग्नेटिक हस्तक्षेपाची वाढलेली पातळी लक्षात घेतली जाते, जी स्फोटक वातावरणात अशा मोटर्सचा वापर करण्यास परवानगी देत नाही.
बीडीसी इंजिनचे वैशिष्ट्य म्हणजे रोटरचे वाढलेले गरम करणे, इंजिनच्या डिझाइन वैशिष्ट्यांमुळे थंड करणे कठीण आहे.
कलेक्टर मोटर्सचे फायदे:
- कमी किंमत;
- साधी नियंत्रण प्रणाली;
- उच्च टॉर्क 2-वाइंडिंग कम्युटेटर मोटर्स AC आणि DC दोन्ही ऑपरेशन करण्यास सक्षम आहेत.
कलेक्टर मोटर्सच्या ऑपरेशनची वैशिष्ट्ये:
- ब्रशेसची नियतकालिक देखभाल आवश्यक असते, इंजिनची विश्वासार्हता कमी करते;
- स्विचिंग प्रक्रियेदरम्यान, इलेक्ट्रिकल स्पार्क आणि इलेक्ट्रोमॅग्नेटिक हस्तक्षेप होतो;
- जास्त गरम झालेल्या रोटरमधून उष्णता काढून टाकणे कठीण आहे.
ब्रशलेस मोटर्स
DC मोटर्समध्ये काहीसे कमी सामान्य म्हणजे ब्रशलेस डिझाइन (ब्रशलेस डीसी किंवा बीएलडीसी) स्थायी चुंबकांसह रोटर वापरून जे स्टेटर इलेक्ट्रोमॅग्नेट्स (आकृती 4) दरम्यान फिरतात. येथे विद्युतप्रवाहाचे स्विचिंग इलेक्ट्रॉनिक पद्धतीने केले जाते. स्टेटर इलेक्ट्रोमॅग्नेट्सचे विंडिंग स्विच केल्याने रोटरचे चुंबकीय क्षेत्र त्याच्या फील्डचे अनुसरण करते.
रोटरची वर्तमान स्थिती सामान्यत: एन्कोडर्स किंवा हॉल इफेक्ट सेन्सरद्वारे नियंत्रित केली जाते किंवा या प्रकरणात वेगळा रोटर पोझिशन सेन्सर (सेन्सरलेस) न वापरता विंडिंग्सवरील बॅक-ईएमएफ व्होल्टेज मोजण्यासाठी तंत्रज्ञानाचा वापर केला जातो.
स्टेटर विंडिंग्सच्या प्रवाहाचे स्विचिंग इलेक्ट्रॉनिक की (वाल्व्ह) वापरून केले जाते. म्हणूनच BLDC ब्रशलेस मोटर्सना "स्विच्ड मोटर्स" असे संबोधले जाते. मोटर विंडिंगच्या जोडीला जोडण्याचा क्रम रोटरच्या वर्तमान स्थितीवर अवलंबून असतो.
BLDC च्या ऑपरेशनचे सिद्धांत या वस्तुस्थितीवर आधारित आहे की कंट्रोलर स्टेटर विंडिंग्स स्विच करतो जेणेकरून स्टेटर चुंबकीय क्षेत्र वेक्टर नेहमी रोटरच्या चुंबकीय क्षेत्राच्या वेक्टरच्या सापेक्ष 90° किंवा -90° जवळच्या कोनाद्वारे हलविला जातो. स्विचिंग दरम्यान फिरणाऱ्या चुंबकीय क्षेत्रामुळे कायम चुंबक असलेले रोटर त्याच्यामागे फिरते.
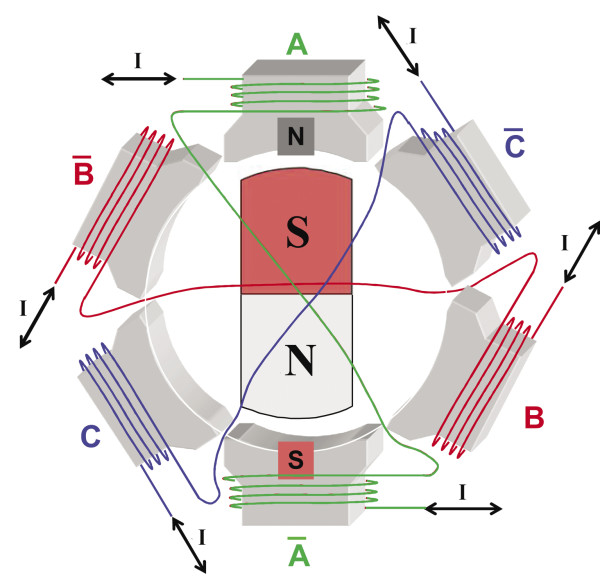
थ्री-फेज कंट्रोल सिग्नल वापरताना, विंडिंगच्या फक्त दोन जोड्या नेहमी वर्तमान स्त्रोताशी जोडल्या जातात आणि एक डिस्कनेक्ट केला जातो. परिणामी, सहा राज्यांचे संयोजन अनुक्रमे वापरले जाते (आकृती 5).

रोटर पोझिशन सेन्सरशिवाय इलेक्ट्रिक मोटर्स उत्पादन प्रक्रियेची वाढीव उत्पादनक्षमता आणि कमी खर्चाद्वारे वैशिष्ट्यीकृत आहेत. हे डिझाइन बाह्य कनेक्शन टर्मिनल्सचे सीलिंग सुलभ करते.
हॉल सेन्सर्सचा वापर बीएलडीसीमध्ये स्पीड आणि रोटर पोझिशन सेन्सर म्हणून केला जाऊ शकतो, जे कमी किमतीत, परंतु कमी रिझोल्यूशनद्वारे देखील वैशिष्ट्यीकृत आहेत. वाढीव रिझोल्यूशन रोटेटिंग ट्रान्सफॉर्मर्स (रिझोल्व्हर्स) द्वारे प्रदान केले जाते. ते महाग आहेत आणि डीएसी वापरणे आवश्यक आहे कारण आउटपुट साइनसॉइडल आहे. ऑप्टिकल सेन्सरमध्ये उच्च रिझोल्यूशन असते, परंतु विश्वसनीयता कमी होते. आकृती 6 मोटर रोटरच्या रोटेशन दरम्यान विविध प्रकारच्या सेन्सर्सचे आउटपुट सिग्नल दर्शविते.

BLDC मोटर्सचे फायदे:
- उच्च कार्यक्षमता;
- ब्रशेसचा अभाव, वाढीव विश्वासार्हता प्रदान करणे, देखभाल खर्च कमी करणे;
- वर्तमान/टॉर्क रेखीयता;
- सरलीकृत उष्णता नष्ट करणे.
BLDC मोटर्सची ऍप्लिकेशन वैशिष्ट्ये:
- रोटरच्या स्थितीवर अभिप्राय असलेली अधिक जटिल नियंत्रण प्रणाली;
- टॉर्क तरंग.
स्टेपर मोटर्स
स्टेपर मोटर्स (SM) ऑटोमेशन आणि कंट्रोल सिस्टममध्ये मोठ्या प्रमाणावर वापरले जातात. ते ब्रशलेस डीसी मोटरचे दुसरे प्रकार आहेत. संरचनात्मकदृष्ट्या, स्टेपर मोटर्समध्ये स्टेटर असतो, ज्यावर उत्तेजित विंडिंग स्थित असतात आणि चुंबकीय सामग्रीचा रोटर असतो. चुंबकीय रोटरसह स्टेपर मोटर्स अधिक टॉर्क आणि डी-एनर्जाइज्ड विंडिंगसह रोटरचे कठोर निर्धारण करण्यास अनुमती देतात.
रोटेशनच्या प्रक्रियेत, एसएम रोटर स्टेटर विंडिंग्सवर लागू केलेल्या पॉवर पल्सच्या नियंत्रणाखाली चरणांमध्ये फिरतो. स्टार्ट-स्टॉप मोडमध्ये कार्यरत असलेल्या मशीन्स आणि यंत्रणांच्या ड्राइव्हमध्ये वापरण्यासाठी स्टेपर मोटर्स सोयीस्कर आहेत. त्यांच्या हालचालींची श्रेणी विद्युत आवेगांच्या विशिष्ट क्रमाने सेट केली जाते. अशा मोटर्स अत्यंत अचूक असतात, त्यांना सेन्सर्स आणि फीडबॅक सर्किट्सची आवश्यकता नसते. रोटरच्या रोटेशनचा कोन लागू केलेल्या नियंत्रण डाळींच्या संख्येवर अवलंबून असतो. स्थिती अचूकता (चरण आकार) मोटरच्या डिझाइन वैशिष्ट्यांवर, विंडिंग कनेक्शन योजना आणि त्यावर लागू केलेल्या नियंत्रण डाळींचा क्रम यावर अवलंबून असते.
विंडिंग कनेक्शन योजनेच्या कॉन्फिगरेशनवर अवलंबून, स्टेपर मोटर्स द्विध्रुवीय आणि एकध्रुवीय मध्ये विभागली जातात. द्विध्रुवीय मोटरमध्ये प्रत्येक दोन टप्प्यांमध्ये दोन्ही स्टेटर पोलसाठी एकच वळण असते, जे चुंबकीय क्षेत्राची दिशा बदलण्यासाठी चालकाने उलट केले पाहिजे. द्विध्रुवीय मोटरमध्ये दोन विंडिंग असतात आणि त्यानुसार चार आउटपुट असतात. अशा स्टेपर मोटर नियंत्रित करण्यासाठी, 2-पोल पॉवर सप्लायसह ब्रिज ड्रायव्हर किंवा अर्धा-ब्रिज सर्किट आवश्यक आहे. द्विध्रुवीय नियंत्रणासह, दोन विंडिंग एकाच वेळी कार्य करतात आणि टॉर्क सुमारे 40% अधिक असतो. आकृती 7 द्विध्रुवीय स्टेपर मोटरच्या रोटेशन दरम्यान नियंत्रण सिग्नलचा क्रम दर्शविते.

युनिपोलर मोटर प्रत्येक फेजमध्ये एक मिड-टर्मिनेटेड वाइंडिंग वापरते आणि चार हाफ-विंडिंग्सपैकी प्रत्येकासाठी एक की सह सोप्या कंट्रोल स्कीमला अनुमती देते.
बायपोलर आणि युनिपोलर कॉन्फिगरेशनमध्ये फोर वाइंडिंग स्टेप मोटर्स वापरल्या जाऊ शकतात.
जेव्हा एका कॉइलमधून विद्युतप्रवाह वाहतो तेव्हा रोटरची स्थिती बदलण्याची प्रवृत्ती असते ज्यामुळे रोटर आणि स्टेटरचे विरुद्ध ध्रुव एकमेकांच्या विरूद्ध सेट केले जातात. रोटरच्या सतत फिरण्यासाठी, कॉइल वैकल्पिकरित्या स्विच केल्या जातात.
सराव मध्ये, चार स्टेटर विंडिंगला वीज पुरवठा करण्याचे वेगवेगळे मार्ग वापरले जातात. बर्याचदा, जोडलेले कनेक्शन पूर्ण-चरण किंवा अर्ध-चरण ऑपरेशनसह वापरले जातात. फुल स्टेप मोडमध्ये, कॉइलच्या दोन जोड्यांचे स्विच करण्यायोग्य चुंबकीय क्षेत्रामध्ये फिरणारा दोन-ध्रुव रोटर चार स्थान घेऊ शकतो (आकृती 8).

दुहेरी पोझिशनिंग अचूकता आणि आठ पोझिशन्स प्राप्त करण्यासाठी अर्ध-चरण ऑपरेशनला परवानगी देते (आकृती 9). त्याची अंमलबजावणी करण्यासाठी, सर्व चार कॉइलच्या एकाचवेळी पॉवरिंगसह एक मध्यवर्ती पायरी जोडली जाते.

मायक्रोस्टेप मोड इंटरमीडिएट पोझिशन्सची संख्या आणि पोझिशनिंग अचूकता लक्षणीय वाढविण्यास अनुमती देतो. मायक्रोस्टेपची कल्पना म्हणजे कंट्रोल पल्सऐवजी स्टेपर मोटरच्या विंडिंगवर सतत सिग्नल लागू करणे, आकारात स्टेप केलेल्या सायनसॉइडसारखे (आकृती 10). या प्रकरणात एक पूर्ण पायरी लहान मायक्रोस्टेप्समध्ये विभागली गेली आहे आणि रोटेशन अधिक नितळ होते. मायक्रोस्टेप मोड तुम्हाला सर्वात अचूक पोझिशनिंग मिळवू देतो. याव्यतिरिक्त, या मोडमध्ये, स्टेपर मोटर्समध्ये अंतर्निहित घरांचे कंपन लक्षणीयरीत्या कमी होते.

स्टेपर मोटर्सचे फायदे:
- रोटेशन आणि पोझिशनिंगचा वेग नियंत्रित करण्यासाठी सर्किट्सच्या अनुपस्थितीमुळे कमी किंमत;
- उच्च स्थान अचूकता;
- रोटेशन गतीची विस्तृत श्रेणी;
- डिजिटल कंट्रोलर्ससह साधे नियंत्रण इंटरफेस;
- खूप उच्च विश्वसनीयता;
- चांगला होल्डिंग क्षण.
स्टेपर मोटर्सच्या वापराची वैशिष्ट्ये:
- SD अनुनाद च्या घटनेत अंतर्निहित आहे;
- फीडबॅकच्या कमतरतेमुळे, स्थिती नियंत्रण गमावणे शक्य आहे;
- लोडशिवाय चालत असतानाही वीज वापर कमी होत नाही;
- खूप उच्च वेगाने काम करणे कठीण;
- कमी विशिष्ट शक्ती;
- ऐवजी जटिल नियंत्रण योजना.
पारंपारिक मोटर नियंत्रण उपाय
आधुनिक अचूक डीसी मोटर कंट्रोल सिस्टममध्ये डेटा प्रोसेसिंगसाठी मायक्रोकंट्रोलर आणि मोटर विंडिंगसाठी पॉवर कंट्रोल युनिट समाविष्ट आहे, ज्याला ड्रायव्हर म्हणतात. ड्रायव्हरमध्ये एन्कोड केलेले संदेश डिजिटल कंट्रोल सिग्नलमध्ये रूपांतरित करण्यासाठी लॉजिक सर्किट समाविष्ट आहे, ज्यामधून फील्ड इफेक्ट ट्रान्झिस्टर (FETs) वर आधारित पॉवर स्विच नियंत्रित करण्यासाठी गेट ड्रायव्हर ब्लॉकमध्ये अॅनालॉग सिग्नल तयार केले जातात. FETs ड्रायव्हरमध्ये समाविष्ट केले जाऊ शकतात किंवा वेगळ्या ब्लॉकमध्ये ठेवले जाऊ शकतात. याव्यतिरिक्त, ड्रायव्हरमध्ये पॉवर सर्किट्ससाठी संरक्षण सर्किट्स आणि मोटरच्या ऑपरेशनवर नियंत्रण ठेवण्यासाठी फीडबॅक सर्किट समाविष्ट आहेत.
आकृती 11 इंटिग्रेटेड आणि प्री-ड्रायव्हर्ससाठी ब्लॉक डायग्राम पर्याय दाखवते. प्रत्येक सोल्यूशनचे स्वतःचे फायदे आणि वैशिष्ट्ये आहेत. प्री-ड्रायव्हरमध्ये तापमानात लक्षणीय घट झाली आहे, आपल्याला कनेक्ट केलेल्या इंजिनच्या सामर्थ्यानुसार बाह्य पॉवर स्विचेस निवडण्याची परवानगी देते. पूर्ण-वैशिष्ट्यीकृत इंटिग्रेटेड ड्रायव्हर अधिक कॉम्पॅक्ट कंट्रोल सिस्टमला परवानगी देतो, बाह्य कनेक्शन कमी करतो, परंतु तापमान नियंत्रण अधिक कठीण बनवतो.

तर, एकात्मिक TI ड्रायव्हरसाठी, बोर्डवरील वैयक्तिक घटकांचे कमाल ऑपरेटिंग तापमान 193°C पर्यंत पोहोचू शकते आणि प्राथमिक ड्रायव्हरसाठी, हा आकडा 37°C पेक्षा जास्त नाही.

मोटर विंडिंग स्विच करण्यासाठी सर्वात सामान्य सर्किट्सपैकी एक म्हणजे “एच” प्रकारचा पूल. योजनेचे नाव कनेक्शन कॉन्फिगरेशनशी संबंधित आहे, जे "H" अक्षरासारखे आहे. हे इलेक्ट्रॉनिक सर्किट लोडमधील विद्युत् प्रवाहाची दिशा आणि त्यानुसार, रोटरच्या रोटेशनची दिशा बदलणे सोपे करते. ब्रिज ट्रान्झिस्टरद्वारे विंडिंग्सवर लागू केलेला व्होल्टेज PWM वापरून स्थिर आणि मोड्यूलेटेड दोन्ही असू शकतो. एच-ब्रिजची रचना प्रामुख्याने मोटर पॉवर सप्लाय - रिव्हर्स (आकृती 12) ची ध्रुवीयता बदलण्यासाठी केली गेली आहे, परंतु विंडिंग लीड्स (आकृती 13) शॉर्ट-सर्किट करून आपल्याला रोटेशन कमी करण्यास देखील अनुमती देते.

ब्रिजच्या पॉवर एलिमेंट्सचे सर्वात महत्वाचे वैशिष्ट्य, जे आज बर्याचदा इन्सुलेटेड गेटसह फील्ड-इफेक्ट ट्रान्झिस्टर म्हणून वापरले जाते, ट्रान्झिस्टरचा स्त्रोत आणि ड्रेन - आरडीएसओएन दरम्यानच्या खुल्या चॅनेलचे प्रतिरोध मूल्य आहे. RDSON मूल्य मुख्यत्वे ब्लॉकची थर्मल कार्यक्षमता आणि पॉवर लॉस ठरवते. वाढत्या तापमानासह, RDSON देखील वाढते आणि विंडिंग्सवरील विद्युत् प्रवाह आणि व्होल्टेज कमी होते.
PWM कंट्रोल सिग्नलचा वापर टॉर्क रिपल कमी करतो आणि मोटर रोटरचे नितळ रोटेशन सुनिश्चित करतो. आदर्शपणे, ध्वनिक आवाज टाळण्यासाठी PWM वारंवारता 20 kHz पेक्षा जास्त असावी. परंतु वारंवारता वाढते म्हणून, स्विचिंग प्रक्रियेदरम्यान ब्रिज ट्रान्झिस्टरवरील नुकसान वाढते.
विंडिंग्सच्या स्वरूपात लोडच्या आगमनात्मक गुणधर्मांमुळे, त्यातील विद्युत् प्रवाहाचा आकार लागू केलेल्या पीडब्ल्यूएम व्होल्टेजच्या आकाराशी जुळत नाही. व्होल्टेज पल्स लागू केल्यानंतर, विद्युत प्रवाह हळूहळू वाढतो आणि विरामांमध्ये विंडिंग्समध्ये बॅक-ईएमएफच्या घटनेमुळे विद्युत् प्रवाह हळूहळू कमी होतो. वर्तमान आलेखावरील वक्र उतार, तरंगाचे मोठेपणा आणि वारंवारता मोटरच्या कार्यक्षमतेवर (टॉर्क रिपल, आवाज, पॉवर इ.) प्रभावित करते.
बॅक-ईएमएफ प्रभावाने उत्तेजित करंटच्या इलेक्ट्रिक मोटर्सच्या विंडिंग्समध्ये प्रवेगक क्षीणतेसाठी, डायोडचा वापर उलट कनेक्शनमध्ये केला जातो, ट्रान्झिस्टरचे ड्रेन-स्रोत संक्रमण बंद केले जाते किंवा विंडिंग्सच्या ड्रेन-स्रोत संक्रमणाद्वारे शॉर्ट सर्किट केले जातात. दोन ट्रान्झिस्टर एकाच वेळी पुलाच्या वेगवेगळ्या हातांमध्ये जोडलेले आहेत. आकृती 13 पुलाच्या तीन अवस्था दर्शविते: कार्यरत, जलद क्षीणता (जलद क्षय) आणि मंद क्षीणता (स्लो क्षय).
आणि सर्वात प्रभावी म्हणजे एकत्रित मोड (मिश्र क्षय), ज्यामध्ये, कार्यरत डाळींच्या दरम्यानच्या विरामात, ट्रान्झिस्टरचा ड्रेन-स्रोत शंट करणारे डायोड प्रथम कार्य करतात आणि नंतर पुलाच्या खालच्या खांद्यांमधील ट्रान्झिस्टर चालू होतात. .
टीआय मोटर कंट्रोल सोल्युशन्स
टीआयच्या सेमीकंडक्टर घटकांमध्ये डीसी मोटर्स नियंत्रित करण्यासाठी विविध ड्रायव्हर्सची विस्तृत श्रेणी समाविष्ट आहे. या सर्वांसाठी किमान बाह्य घटक आवश्यक आहेत, 60 V पर्यंत मोटर नियंत्रणासाठी कॉम्पॅक्ट सोल्यूशन्स प्रदान करतात, वाढीव विश्वासार्हता प्रदान करतात आणि मोटर ड्राइव्ह सिस्टमची जलद आणि सुलभ रचना प्रदान करतात.
ड्रायव्हर्समध्ये तयार केलेल्या बुद्धिमान वैशिष्ट्यांसाठी किमान बाह्य नियंत्रण मायक्रोकंट्रोलर (MCU) समर्थन आवश्यक आहे, प्रगत वाइंडिंग स्विचिंग क्षमता प्रदान करते, बाह्य सेन्सर्स आणि डिजिटल नियंत्रण लूपला समर्थन देतात. संरक्षणात्मक कार्यांच्या कॉम्प्लेक्समध्ये पुरवठा व्होल्टेज मर्यादित करणे, ओव्हरकरंट आणि शॉर्ट सर्किटपासून संरक्षण, अंडरव्होल्टेज आणि ऑपरेटिंग तापमानात वाढ समाविष्ट आहे.
टीआय ड्रायव्हर्सची संपूर्ण श्रेणी तीन विभागांमध्ये विभागली गेली आहे: स्टेपर, ब्रश आणि ब्रशलेस डीसी मोटर्स. कंपनीच्या वेबसाइटवर त्यापैकी प्रत्येकामध्ये अनेक पॅरामीटर्ससाठी सोयीस्कर निवड प्रणाली आहे. वेगवेगळ्या प्रकारच्या मोटर्ससह वापरण्यासाठी डिझाइन केलेले स्वतंत्र ड्रायव्हर्स आहेत.
टीआय स्टेपर मोटर ड्रायव्हर्स
टीआय मोटर कंट्रोल सोल्यूशन्सच्या मोठ्या विभागात स्टेपर मोटर ड्रायव्हर्स (आकृती 14) समाविष्ट आहेत, जे अंगभूत FET-आधारित पॉवर स्विचसह आणि प्री-ड्रायव्हर्स म्हणून उपलब्ध आहेत जे वापरकर्त्याला आवश्यक पॉवर स्विचेसची निवड प्रदान करतात. एकूण, कंपनीच्या मॉडेल श्रेणीमध्ये स्टेपर मोटर्ससाठी 35 पेक्षा जास्त ड्रायव्हर्स समाविष्ट आहेत.

TI अत्याधुनिक मोशन कंट्रोलची विस्तृत श्रेणी आणि सूक्ष्म-स्टेपिंग कंट्रोल सर्किट्स वापरून अचूक पोझिशनिंग सोल्यूशन्स देते जे मोटर्सला व्होल्टेज आणि करंट्सच्या विस्तृत श्रेणीवर सहज गती प्रदान करते.
स्वतंत्र ड्रायव्हर्स, एक कंट्रोल कंट्रोलर वापरून, तुम्हाला एकाच वेळी दोन मोटर्स नियंत्रित करण्याची परवानगी देतात, यासाठी चार अंगभूत FET-आधारित पूल आहेत. अंगभूत FET असलेले ड्रायव्हर्स आहेत, जसे की DRV8834, जे एका स्टेपर मोटरच्या दोन विंडिंग चालविण्यासाठी कनेक्ट केले जाऊ शकतात किंवा दोन DC मोटर चालविण्यासाठी समान पिन वापरू शकतात (आकृती 15).

स्टेपर मोटर्ससाठी ड्रायव्हर्समध्ये रोटरच्या सुरळीत हालचालीसाठी, वर्तमान डाळी गुळगुळीत करण्यासाठी सानुकूल करण्यायोग्य यंत्रणा वापरली जाते (मंद, वेगवान, मिश्रित क्षय मोड). मायक्रोस्टेप गणना प्रणाली खालील प्रकारची असू शकते:
- ड्रायव्हरमध्ये अंगभूत;
- बाह्य संदर्भ सिग्नल वापरणे.
मायक्रोस्टेपिंग ड्रायव्हर्ससाठी बाह्य नियंत्रकाची आवश्यकता नाही , आणि . येथे, हालचालीची पायरी आणि विंडिंग स्विचिंग अल्गोरिदमची गणना ड्रायव्हरमध्ये तयार केलेल्या सर्किटद्वारे केली जाते.
BDC साठी TI ड्रायव्हर्स
नियंत्रित करण्यासाठी - कलेक्टर डीसी मोटर्स - ड्रायव्हर्सचे एक विशेष कुटुंब आहे, ज्याचे अनेक प्रतिनिधी आकृती 16 मध्ये दर्शविले आहेत. ते ओव्हरव्होल्टेज आणि करंट, शॉर्ट सर्किट आणि ओव्हरहाटिंगपासून संपूर्ण संरक्षण प्रदान करतात. त्यांच्या कंट्रोल इंटरफेस क्षमतेसह, हे ड्रायव्हर्स सोपे आणि कार्यक्षम मोटर ऑपरेशन प्रदान करतात. वापरकर्ते 1.8 ... 60 V च्या ऑपरेटिंग व्होल्टेजसह एक किंवा अधिक मोटर्स नियंत्रित करण्यासाठी एक चिप वापरू शकतात.

फॅमिली ड्रायव्हर्स इंटिग्रेटेड पॉवर की आणि प्री-रिलीझ ड्रायव्हर्स दोन्ही उपलब्ध आहेत. त्यांना किमान अतिरिक्त घटकांची आवश्यकता असते, कॉम्पॅक्ट सोल्यूशन्स प्रदान करतात, विकासाचा वेळ कमी करतात आणि नवीन उत्पादने वेगाने बाजारात आणण्याची परवानगी देतात.
स्लीप मोड निष्क्रिय असताना उर्जेचा वापर कमी करतो आणि इंजिन सुरू करताना जलद सक्रियता प्रदान करतो. वेग नियंत्रणासाठी, बाह्य PWM सिग्नल किंवा PHASE/ENABLE सिग्नलचा वापर रोटेशनची दिशा निवडण्यासाठी आणि आउटपुट ब्रिज स्विचेस चालू करण्यासाठी केला जाऊ शकतो.
चार आउटपुट ब्रिज असल्याने, ड्रायव्हर दोन स्टेपर किंवा एक स्टेपर आणि दोन बीडीसी, किंवा एसपीआय कंट्रोल इंटरफेस वापरून चार बीडीसी चालविण्यास सक्षम आहे.
आकृती 17 एक कलेक्टर मोटर नियंत्रित करण्यासाठी साध्या ड्रायव्हरचे कार्यात्मक आकृती दर्शविते.

BLDC साठी TI ड्रायव्हर्स
TI चे ब्रशलेस मोटर ड्रायव्हर्स, किंवा BLDC, एकात्मिक पॉवर ब्रिज समाविष्ट करू शकतात किंवा बाह्य पॉवर ट्रान्झिस्टर वापरू शकतात. 3-फेज कंट्रोल सिग्नल तयार करण्यासाठी सर्किट बाह्य किंवा अंगभूत देखील असू शकते.
ब्रशलेस इलेक्ट्रिक मोटर्स नियंत्रित करण्यासाठी चालकांच्या कुटुंबात भिन्न नियंत्रण तत्त्वे आणि भिन्न टॉर्क असलेले मॉडेल समाविष्ट आहेत. हे ड्रायव्हर्स औद्योगिक उपकरणे, ऑटोमोटिव्ह सिस्टीम आणि इतर ऍप्लिकेशन्समध्ये वापरण्यासाठी आदर्श आहेत, BDLC चालवताना आवाजाचे विविध स्तर प्रदान करतात. मोटर्सचे विश्वसनीय ऑपरेशन सुनिश्चित करण्यासाठी, ड्रायव्हर्स ओव्हर-करंट, ओव्हर-व्होल्टेज आणि जास्त-तापमान संरक्षणांचा एक व्यापक संच प्रदान करतात. आकृती 18 TI च्या विस्तृत आणि वाढत्या पोर्टफोलिओमधील 3-फेज BLDC ड्रायव्हर्सपैकी काही दर्शवते.

रोटेटिंग रोटरची वर्तमान स्थिती नियंत्रित करण्यासाठी, विविध प्रकारचे बाह्य सेन्सर किंवा बॅक-ईएमएफ (बॅक इलेक्ट्रोमोटिव्ह फोर्स, बीईएमएफ) च्या मूल्याद्वारे रोटरची स्थिती निर्धारित करणारे नियंत्रण सर्किट वापरले जाऊ शकते.
नियंत्रण PWM, अॅनालॉग सिग्नल किंवा मानक डिजिटल इंटरफेस वापरून केले जाऊ शकते. रोटेशन कंट्रोलसाठी सानुकूल करण्यायोग्य पॅरामीटर्सचे सेट अंतर्गत नॉन-व्होलॅटाइल मेमरीमध्ये संग्रहित केले जाऊ शकतात.
आकृती 19 BLDC साठी 40…125°C च्या विस्तृत तापमान श्रेणीमध्ये अंगभूत FET पॉवर स्विचेससह, फक्त 250 mΩ च्या खुल्या चॅनेलच्या प्रतिकारासह कार्यरत असलेला बुद्धिमान ड्रायव्हर दर्शवितो. 8…28 V च्या ऑपरेटिंग व्होल्टेज श्रेणीसह, ड्रायव्हर 2 A चा नाममात्र प्रवाह आणि 3 A चा पीक करंट प्रदान करू शकतो.

रोटरची स्थिती नियंत्रित करण्यासाठी ड्रायव्हरला बाह्य सेन्सरची आवश्यकता नसते, परंतु मोटरद्वारे काढलेली शक्ती नियंत्रित करण्यासाठी बाह्य प्रतिरोधक वापरू शकतो. स्टँडबाय मोडमध्ये फक्त 3 mA चा कमी वीज वापर आहे. आणि मॉडेलमध्ये, हा निर्देशक 180 μA च्या पातळीवर आणला जातो.
अंगभूत I2C इंटरफेस डायग्नोस्टिक्स आणि कॉन्फिगरेशन, लॉजिक सर्किट कंट्रोल रजिस्टर्समध्ये प्रवेश आणि EEPROM मेमरीमध्ये संग्रहित ड्रायव्हर ऑपरेटिंग प्रोफाइल प्रदान करतो.
संरक्षणात्मक कार्यांचा विस्तारित संच हे सुनिश्चित करतो की ओव्हरकरंट आणि अंडरव्होल्टेजच्या बाबतीत मोटर थांबविली जाते. इनपुट व्होल्टेज मर्यादित आहे. ओव्हरकरंट संरक्षण बाह्य रोधकाचा वापर न करता कार्य करते. संरक्षण वापरण्याच्या पद्धती विशेष रजिस्टर्सद्वारे कॉन्फिगर केल्या आहेत.
निष्कर्ष
आधुनिक इलेक्ट्रिक ड्राइव्ह सिस्टीममुळे इलेक्ट्रिक मोटर्सचा वापर मोठ्या प्रमाणावर विविध उपकरणांमध्ये केला जात आहे, सुधारल्या जात आहेत आणि नवीन संधी मिळवत आहेत.
टेक्सास इन्स्ट्रुमेंट्सच्या सेमीकंडक्टर पोर्टफोलिओमध्ये सर्व प्रकारच्या डीसी मोटर्स नियंत्रित करण्यासाठी ड्रायव्हर IC च्या विस्तृत श्रेणीचा समावेश आहे. त्यांच्या आधारावर, कंपनी विद्युत प्रवाह आणि व्होल्टेजच्या विस्तृत श्रेणीमध्ये कार्यरत ड्राइव्हस् तयार करण्यासाठी अचूकता, शक्ती आणि कार्यक्षमतेच्या आवश्यकतेनुसार स्केलेबल सोल्यूशन्स ऑफर करते, संपूर्ण करंटसह कलेक्टर, ब्रशलेस आणि स्टेपर मोटर्सचे विश्वसनीय आणि सोयीस्कर ऑपरेशन प्रदान करते. , व्होल्टेज आणि तापमान संरक्षण.
ट्रान्झिस्टर स्टेपर मोटर चालक
मी KT मालिकेच्या द्विध्रुवीय ट्रान्झिस्टरवर द्विध्रुवीय स्टेपर मोटरचा ड्रायव्हर तुमच्या लक्षात आणून देतो.
ड्रायव्हर एमिटर फॉलोअरच्या तत्त्वावर काम करतो. नियंत्रण सिग्नल kt315 ट्रान्झिस्टरवर एकत्रित केलेल्या प्रवर्धन स्टेजला दिले जाते. त्यानंतर, ते KT815 आणि KT 814 च्या पूरक जोडीतून H ब्रिजला जाईल.
प्रवर्धन स्टेज आवश्यक आहे, कारण मायक्रोकंट्रोलरच्या आउटपुटवरील वर्तमान शक्ती पुरेसे नाही  पॉवर ट्रान्झिस्टर उघडणे. पॉवर ट्रान्झिस्टरनंतर, मोटरचे सेल्फ-इंडक्शन ओलसर करण्यासाठी डायोड स्थापित केले जातात.
पॉवर ट्रान्झिस्टर उघडणे. पॉवर ट्रान्झिस्टरनंतर, मोटरचे सेल्फ-इंडक्शन ओलसर करण्यासाठी डायोड स्थापित केले जातात.
सर्किट 3 ते 0.1 मायक्रोफॅरॅड्स आणि 1 ते 100 मायक्रोफॅरॅड्सच्या कॅपेसिटरच्या स्वरूपात आवाज दाबण्याची तरतूद करते. ड्रायव्हर 150 वॅट सीडी ड्राइव्ह मोटरसह काम करण्यासाठी डिझाइन केलेले असल्याने, ट्रान्झिस्टर कूलिंग नाही

ट्रान्झिस्टर ड्रायव्हरला जोडलेल्या सीडी ड्राइव्हमधील स्टेपर मोटर
स्थापित केले होते, परंतु KT814 आणि KT815 ट्रान्झिस्टरचा कमाल उत्सर्जक प्रवाह 1.5 A आहे, ज्यामुळे हा ड्रायव्हर मोटर्स आणखी शक्तिशालीपणे चालू करू शकतो. हे करण्यासाठी, आपल्याला पॉवर ट्रान्झिस्टरवर कूलिंग प्लेट्स स्थापित करण्याची आवश्यकता आहे.
जरी द्विध्रुवीय स्टेपर मोटर्स तुलनेने महाग आहेत, ते त्यांच्या भौतिक आकारासाठी उच्च टॉर्क प्रदान करतात. तथापि, दोन मोटर विंडिंगसाठी चार एच-ब्रिजमध्ये जोडलेले आठ कंट्रोल ट्रान्झिस्टर आवश्यक आहेत. प्रत्येक ट्रान्झिस्टरने ओव्हरलोड्स आणि शॉर्ट सर्किट्सचा सामना केला पाहिजे आणि त्वरीत पुनर्प्राप्त केले पाहिजे. आणि ड्रायव्हरला, त्यानुसार, मोठ्या संख्येने निष्क्रिय घटकांसह जटिल संरक्षण सर्किट आवश्यक आहेत.

चित्र १
आकृती 1. पृष्ठभाग माउंट पॅकेजमधील एक चिप आणि अनेक निष्क्रिय घटक बायपोलर स्टेपर मोटर चालवू शकतात.
बायपोलर स्टेपर मोटर कंट्रोल
DIY स्टेपर मोटर ड्रायव्हर— आकृती 1 मॅक्सिमच्या क्लास डी ऑडिओ अॅम्प्लिफायरवर आधारित पर्यायी मोटर ड्रायव्हर सर्किट दाखवते. लघु पृष्ठभाग माउंट पॅकेजमधील MAX9715 ठराविक 4 किंवा 8 ohm लोडमध्ये 2.8W पर्यंत वितरीत करू शकते. मायक्रोसर्किटचे प्रत्येक दोन आउटपुट शक्तिशाली MOSFETs च्या H-पुलांद्वारे तयार केले जाते जे अनुक्रमे स्टीपर मोटरच्या विंडिंग्स A आणि B शी जोडलेल्या OUTR +, OUTR- आणि OUTL +, OUTL- च्या जोड्या नियंत्रित करतात. प्रत्येक जोडी 1.22 मेगाहर्ट्झच्या नाममात्र स्विचिंग वारंवारतासह भिन्न पल्स रुंदी मॉड्यूलेटेड सिग्नल तयार करते. सर्किटद्वारे निर्माण होणारा कमी आवाज आउटपुट फिल्टरची आवश्यकता काढून टाकतो.
डिकपलिंग कॅपेसिटर
कॅपेसिटर C1, C3, C4 आणि C6 पॉवर आणि बायस इनपुटसाठी डीकपलिंग म्हणून काम करतात, तर C5 आणि C7 उच्च-शक्ती वर्ग D आउटपुट अॅम्प्लिफायर्ससाठी स्टोरेज कार्ये करतात. कॅपेसिटर C8 आणि C9 अॅम्प्लिफायर बँडविड्थ 16 Hz पर्यंत मर्यादित करतात आणि फेराइट मणी L2 आणि L3 लांब केबल्सवर प्रेरित विद्युत आवाज कमी करते. U-shaped फिल्टर C1, C2, L1 IC1 चिपच्या पॉवर इनपुटवर हस्तक्षेप दाबतो. Step_A आणि Step_B microcircuits चे इनपुट सिग्नल, जे इंजिनच्या उजव्या आणि डाव्या चॅनेलवर नियंत्रण ठेवतात, ते कोणत्याही योग्य नियंत्रकाद्वारे व्युत्पन्न केले जाऊ शकतात. स्टेपर मोटर खराब झाल्यास किंवा त्याच्या आउटपुटचे चुकीचे कनेक्शन झाल्यास अंतर्गत सर्किट्स अॅम्प्लीफायरला शॉर्ट सर्किट्स आणि ओव्हरहाटिंगपासून संरक्षण करतात.

तक्ता 1
पल्स ट्रेनचे चित्रण
तक्ता 1 पल्स क्रम स्टेप_ए आणि स्टेप_बी दर्शविते जे 0 ते 4 पर्यंत सिग्नल कॉम्बिनेशन्स सतत लागू करून ठराविक स्टेपर मोटरच्या एका दिशेने रोटेशन नियंत्रित करतात. पायरी 4 मोटर शाफ्टला त्याच्या मूळ स्थितीत परत करते, 360° चे रोटेशन पूर्ण करते. मोटरच्या रोटेशनची दिशा बदलण्यासाठी, टेबलच्या तळापासून आवेगांचा एक वेळ आकृती तयार करणे सुरू करा आणि क्रमशः त्याच्या बाजूने वर जा. मायक्रोसर्किट (पिन 8) च्या SHDN इनपुटवर लॉजिक लो व्होल्टेज लागू करून, तुम्ही अॅम्प्लीफायरचे दोन्ही चॅनेल बंद करू शकता. सर्किटच्या इनपुट आणि आउटपुटमधील वेव्हफॉर्म्स आकृती 2 मध्ये दर्शविल्या आहेत.
सिद्धांत आणि ड्रायव्हर्सच्या प्रकारांचा थोडक्यात परिचय, स्टेपर मोटरसाठी इष्टतम ड्रायव्हर निवडण्यासाठी टिपा.
आपण इच्छित असल्यासस्टेपर मोटर ड्रायव्हर खरेदी करा , उजवीकडे इन्फॉर्मर वर क्लिक करा
काही माहिती जी तुम्हाला मदत करू शकते स्टेपर मोटर चालक निवडा.
स्टेपर मोटर ही एक जटिल नियंत्रण सर्किट असलेली मोटर आहे ज्यासाठी विशेष इलेक्ट्रॉनिक उपकरण आवश्यक आहे - स्टेपर मोटर ड्रायव्हर. स्टेपर मोटर ड्रायव्हरला इनपुटवर STEP / DIR लॉजिक सिग्नल प्राप्त होतात, जे, नियमानुसार, 5 V च्या संदर्भ व्होल्टेजच्या उच्च आणि निम्न स्तराद्वारे दर्शविले जातात आणि प्राप्त झालेल्या सिग्नलच्या अनुषंगाने, विद्युत् प्रवाह बदलतात. मोटर विंडिंग्स, शाफ्टला दिलेल्या कोनाद्वारे संबंधित दिशेने वळण्यास भाग पाडते. >STEP/DIR सिग्नल सीएनसी कंट्रोलरद्वारे किंवा मॅच3 किंवा लिनक्ससीएनसी सारख्या कंट्रोल प्रोग्राम चालवणाऱ्या वैयक्तिक संगणकाद्वारे व्युत्पन्न केले जातात.
ड्रायव्हरचे कार्य म्हणजे विंडिंग्समधील विद्युतप्रवाह शक्य तितक्या कार्यक्षमतेने बदलणे, आणि विंडिंग्जचा इंडक्टन्स आणि हायब्रिड स्टेपर मोटरचा रोटर या प्रक्रियेत सतत हस्तक्षेप करत असल्याने, ड्रायव्हर्स त्यांच्या वैशिष्ट्यांमध्ये एकमेकांपासून बरेच वेगळे असतात आणि परिणामी हालचालीची गुणवत्ता. विंडिंग्समध्ये वाहणारा प्रवाह रोटरची हालचाल निर्धारित करतो: विद्युत् प्रवाहाची तीव्रता टॉर्क सेट करते, त्याची गतिशीलता एकसमानतेवर परिणाम करते इ.
स्टेपर मोटर ड्रायव्हर्सचे प्रकार (प्रकार).
विंडिंग्समध्ये विद्युत प्रवाह पंप करण्याच्या पद्धतीनुसार ड्रायव्हर्सला अनेक प्रकारांमध्ये विभागले गेले आहे:
1) स्थिर व्होल्टेज ड्रायव्हर्स
हे ड्रायव्हर्स वळणावर स्थिर व्होल्टेज पातळी लागू करतात, परिणामी प्रवाह विंडिंगच्या प्रतिकारावर अवलंबून असतो आणि उच्च वेगाने देखील इंडक्टन्सवर. हे ड्रायव्हर्स अत्यंत अकार्यक्षम आहेत आणि ते अगदी कमी वेगाने वापरले जाऊ शकतात.
2) दोन-स्तरीय चालक
या प्रकारच्या ड्रायव्हरमध्ये, विंडिंगमधील विद्युतप्रवाह प्रथम उच्च व्होल्टेजच्या मदतीने इच्छित पातळीपर्यंत वाढविला जातो, नंतर उच्च व्होल्टेज स्त्रोत बंद केला जातो आणि इच्छित प्रवाह कमी व्होल्टेज स्त्रोताद्वारे राखला जातो. हे ड्रायव्हर्स बर्यापैकी कार्यक्षम आहेत, इतर गोष्टींबरोबरच मोटरची उष्णता कमी करतात आणि तरीही अधूनमधून उच्च-अंत उपकरणांमध्ये आढळतात. तथापि, असे ड्रायव्हर्स केवळ स्टेप आणि हाफ स्टेप मोडचे समर्थन करतात.
3) PWM सह चालक.
सध्या, पीडब्ल्यूएम स्टेपर मोटर ड्रायव्हर्स सर्वात लोकप्रिय आहेत, बाजारात जवळजवळ सर्व ड्रायव्हर्स या प्रकारचे आहेत. हे ड्रायव्हर्स स्टेपर मोटर वाइंडिंगला खूप उच्च व्होल्टेज PWM सिग्नल लागू करतात, जे विद्युत प्रवाह आवश्यक स्तरावर पोहोचल्यावर कापले जातात. कटऑफ होणारे विद्युतप्रवाह एकतर पोटेंशियोमीटर किंवा डीआयपी स्विचद्वारे सेट केले जाते, कधीकधी हे मूल्य विशेष सॉफ्टवेअर वापरून प्रोग्राम केले जाते. हे ड्रायव्हर्स खूप हुशार आहेत आणि अनेक अतिरिक्त फंक्शन्सने सुसज्ज आहेत, वेगवेगळ्या स्टेप डिव्हिजनना सपोर्ट करतात, ज्यामुळे पोझिशनिंग रिझोल्यूशन आणि गुळगुळीतपणा वाढू शकतो. तथापि, PWM ड्रायव्हर्स देखील एकमेकांपासून खूप वेगळे आहेत. पुरवठा व्होल्टेज आणि कमाल वळण प्रवाह या वैशिष्ट्यांव्यतिरिक्त, त्यांच्याकडे भिन्न PWM वारंवारता आहे. ड्रायव्हरची वारंवारता 20 kHz पेक्षा जास्त असल्यास ते चांगले आहे आणि सर्वसाधारणपणे, ते जितके जास्त असेल तितके चांगले. 20 kHz पेक्षा कमी वारंवारता मोटर्सची चालणारी वैशिष्ट्ये कमी करते आणि ऐकू येण्याजोग्या श्रेणीत येते, स्टेपर मोटर्स एक अप्रिय चीक सोडू लागतात. स्टेपर मोटर ड्रायव्हर्स, स्वतः मोटर्स नंतर, एकध्रुवीय आणि द्विध्रुवीय मध्ये विभागलेले आहेत. सुरुवातीच्या मशिन टूल बिल्डर्सना सक्तपणे सल्ला दिला जातो की आपण ड्राइव्हसह प्रयोग करू नये, परंतु ज्यासाठी आपल्याला जास्तीत जास्त तांत्रिक समर्थन, माहिती आणि कोणत्या उत्पादनांसाठी बाजारात सर्वात मोठ्या प्रमाणात प्रतिनिधित्व मिळू शकेल ते निवडा. हे बायपोलर हायब्रीड स्टेपर मोटर ड्रायव्हर्स आहेत.
स्टेपर मोटर ड्रायव्हर (एसएम) कसे निवडावे
प्रथम पॅरामीटरस्टेपर मोटर ड्रायव्हर निवडताना आपण ज्या गोष्टीकडे लक्ष दिले पाहिजे ते म्हणजे ड्रायव्हर प्रदान करू शकणारे विद्युत प्रवाह. नियमानुसार, ते बर्यापैकी विस्तृत श्रेणीमध्ये नियंत्रित केले जाते, परंतु जर ड्रायव्हरला निवडलेल्या स्टेपर मोटरच्या फेज करंटच्या बरोबरीचे वर्तमान वितरीत करू शकेल अशी एखादी निवड करायची असेल. अर्थातच, ड्रायव्हरची कमाल वर्तमान ताकद आणखी 15-40% जास्त असणे इष्ट आहे. एकीकडे, जर तुम्हाला मोटरमधून अधिक टॉर्क मिळवायचा असेल किंवा भविष्यात अधिक शक्तिशाली इंजिन स्थापित करायचे असेल तर हे मार्जिन देईल, दुसरीकडे, ते अनावश्यक होणार नाही: उत्पादक कधीकधी रेटिंग "समायोजित" करतात. एक किंवा दुसर्या प्रकारच्या / आकाराच्या इंजिनमध्ये इलेक्ट्रॉनिक घटक, त्यामुळे NEMA 17 (42mm) मोटर चालविणारा खूप शक्तिशाली 8A ड्रायव्हर, उदाहरणार्थ, जास्त कंपन होऊ शकतो.
दुसरा क्षणपुरवठा व्होल्टेज आहे. एक अतिशय महत्त्वाचा आणि वादग्रस्त पॅरामीटर. त्याचा प्रभाव बर्यापैकी बहुआयामी आहे - पुरवठा व्होल्टेज डायनॅमिक्स (उच्च गतीने टॉर्क), कंपने, इंजिन गरम करणे आणि ड्रायव्हरला प्रभावित करते. सामान्यतः, जास्तीत जास्त ड्रायव्हर पुरवठा व्होल्टेज अंदाजे कमाल करंट I वेळा 8-10 च्या समान असते. जर कमाल निर्दिष्ट ड्रायव्हर पुरवठा व्होल्टेज या मूल्यांपेक्षा झपाट्याने भिन्न असेल तर, आपण याव्यतिरिक्त विचारले पाहिजे की अशा फरकाचे कारण काय आहे. मोटरचा इंडक्टन्स जितका जास्त असेल तितका ड्रायव्हरला आवश्यक व्होल्टेज जास्त. एक अनुभवजन्य सूत्र U = 32 * sqrt(L) आहे, जेथे L हे स्टेपर मोटर विंडिंगचे इंडक्टन्स आहे. या सूत्राद्वारे प्राप्त केलेले U मूल्य अगदी अंदाजे आहे, परंतु ते आपल्याला ड्रायव्हर निवडताना नेव्हिगेट करण्यास अनुमती देते: U ने ड्रायव्हर पुरवठा व्होल्टेजच्या कमाल मूल्याच्या अंदाजे समान असावे. जर तुम्हाला U बरोबर 70 मिळाले, तर EM706, AM882, YKC2608M-H ड्रायव्हर्स हा निकष पास करतात.
तिसरा पैलू- ऑप्टोकपल्ड इनपुटची उपलब्धता. कारखान्यांमध्ये उत्पादित केलेल्या जवळजवळ सर्व ड्रायव्हर्स आणि कंट्रोलर्समध्ये, विशेषतः ब्रँडेडमध्ये, ऑप्टोकपलर आवश्यक आहे, कारण ड्रायव्हर हे पॉवर इलेक्ट्रॉनिक्स उपकरण आहे आणि की ब्रेकडाउनमुळे केबल्सवर एक शक्तिशाली पल्स होऊ शकते ज्याद्वारे नियंत्रण सिग्नल पुरवले जातात आणि बर्न होतात. एक महाग सीएनसी कंट्रोलर बाहेर. तथापि, आपण अपरिचित मॉडेलचा स्टेपर मोटर ड्रायव्हर निवडण्याचे ठरविल्यास, आपण अतिरिक्तपणे इनपुट आणि आउटपुटच्या ऑप्टोआयसोलेशनच्या उपस्थितीबद्दल विचारले पाहिजे.
चौथा पैलू- रेझोनान्स सप्रेशन मेकॅनिझमची उपलब्धता. स्टेपर मोटर रेझोनान्स ही एक घटना आहे जी नेहमीच घडते, फरक फक्त रेझोनंट फ्रिक्वेंसीमध्ये असतो, जो प्रामुख्याने लोडच्या जडत्वाच्या क्षणावर, ड्रायव्हरचा पुरवठा व्होल्टेज आणि मोटर टप्प्याच्या सेट करंटवर अवलंबून असतो. जेव्हा अनुनाद होतो, तेव्हा शाफ्ट पूर्णपणे थांबेपर्यंत स्टेपर मोटर कंपन करू लागते आणि टॉर्क गमावते. मायक्रोस्टेपिंग आणि अंगभूत अनुनाद भरपाई अल्गोरिदम अनुनाद दाबण्यासाठी वापरले जातात. रेझोनान्समध्ये दोलन करणाऱ्या स्टेपर मोटरचा रोटर विंडिंगमध्ये इंडक्शन EMF चे सूक्ष्म दोलन निर्माण करतो आणि त्यांच्या स्वभावामुळे आणि मोठेपणावरून ड्रायव्हर निर्धारित करतो की रेझोनान्स आहे की नाही आणि तो किती मजबूत आहे. प्राप्त झालेल्या डेटाच्या आधारावर, ड्रायव्हर एकमेकांच्या सापेक्ष वेळेत इंजिनची पायरी किंचित हलवतो - अशा कृत्रिम असमानतेमुळे अनुनाद पातळी कमी होते. रेझोनान्स सप्रेशन सर्व लीडशाइन डीएम, एएम आणि ईएम सीरीज > ड्रायव्हर्समध्ये तयार केले आहे. रेझोनान्स सप्रेशन ड्रायव्हर्स उच्च दर्जाचे ड्रायव्हर्स आहेत आणि जर तुमचे बजेट तुम्हाला त्यांच्यासाठी जाण्याची परवानगी देते. तथापि, या यंत्रणेशिवाय देखील, ड्रायव्हर पूर्णपणे कार्यरत साधन आहे - विकले गेलेले बहुतेक ड्रायव्हर्स अनुनाद नुकसान भरपाईशिवाय आहेत आणि तरीही जगभरातील हजारो मशीन्स समस्यांशिवाय कार्य करतात आणि त्यांची कार्ये यशस्वीरित्या पार पाडतात.
पाचवा पैलू- प्रोटोकॉल भाग. आपल्याला आवश्यक असलेल्या प्रोटोकॉलनुसार ड्रायव्हर कार्य करतो याची आपल्याला खात्री करणे आवश्यक आहे आणि इनपुट सिग्नल पातळी आपल्याला आवश्यक असलेल्या लॉजिक स्तरांशी सुसंगत आहेत. ही तपासणी पाचवा मुद्दा आहे, कारण दुर्मिळ अपवाद वगळता, बहुसंख्य ड्रायव्हर्स STEP/DIR/ENABLE प्रोटोकॉलनुसार कार्य करतात आणि 0..5 V च्या सिग्नल पातळीशी सुसंगत आहेत, तुम्हाला फक्त बाबतीत खात्री करणे आवश्यक आहे .
सहावा पैलू- संरक्षणात्मक कार्यांची उपस्थिती. त्यापैकी, पुरवठा व्होल्टेज ओलांडण्यापासून संरक्षण, विंडिंग करंट (शॉर्ट सर्किट विंडिंग्ससह), पुरवठा व्होल्टेजच्या ध्रुवीयतेच्या उलट होण्यापासून आणि स्टेपर मोटरच्या टप्प्यांच्या चुकीच्या कनेक्शनपासून संरक्षण. यासारखी अधिक वैशिष्ट्ये, चांगले.
सातवा पैलू- मायक्रोस्टेप मोडची उपस्थिती. आता जवळजवळ प्रत्येक ड्रायव्हरकडे बरेच मायक्रोस्टेपिंग मोड आहेत. तथापि, प्रत्येक नियमात अपवाद आहेत, आणि Geckodrive ड्रायव्हर्समध्ये फक्त एक मोड आहे - 1/10 चरण विभाग. हे या वस्तुस्थितीद्वारे प्रेरित आहे की मोठ्या विभाजनामुळे अधिक अचूकता येत नाही, याचा अर्थ असा की ते आवश्यक नाही. तथापि, सराव असे दर्शविते की मायक्रोस्टेप पोझिशनिंगची सुस्पष्टता किंवा अचूकता वाढवून अजिबात उपयुक्त नाही, परंतु स्टेप डिव्हिजन जितका जास्त असेल तितकी मोटर शाफ्टची हालचाल नितळ आणि कमी रेझोनन्स या वस्तुस्थितीमुळे उपयुक्त आहे. त्यानुसार, ceteris paribus, विभागणी वापरणे योग्य आहे, अधिक, चांगले. जास्तीत जास्त स्वीकार्य पायरी विभाजन केवळ ड्रायव्हरमध्ये तयार केलेल्या ब्रॅडिस टेबलद्वारेच नव्हे तर इनपुट सिग्नलच्या कमाल वारंवारतेद्वारे देखील निर्धारित केले जाईल - उदाहरणार्थ, 100 kHz इनपुट वारंवारता असलेल्या ड्रायव्हरसाठी, वापरण्यात काहीच अर्थ नाही. 1/256 चा विभाग, कारण रोटेशन गती 100,000 / (200 * 256) * 60 = 117 rpm पर्यंत मर्यादित असेल, जे स्टेपर मोटरसाठी खूप कमी आहे. याव्यतिरिक्त, वैयक्तिक संगणक 100 kHz पेक्षा जास्त वारंवारतेसह सिग्नल तयार करू शकत नाही. तुम्ही हार्डवेअर CNC कंट्रोलर वापरण्याची योजना करत नसल्यास, 100kHz ही तुमची कमाल मर्यादा असण्याची शक्यता आहे, जी 1/32 च्या विभाजनाशी संबंधित आहे.
आठवा पैलू- अतिरिक्त फंक्शन्सची उपलब्धता. त्यापैकी बरेच असू शकतात, उदाहरणार्थ, "स्टॉल" निश्चित करण्याचे कार्य - जाम झाल्यावर शाफ्टचा अचानक थांबणे किंवा स्टेपर मोटरमध्ये टॉर्कची कमतरता, बाह्य त्रुटी संकेतासाठी आउटपुट इ. ते सर्व आवश्यक नाहीत, परंतु मशीन तयार करताना जीवन खूप सोपे करू शकते.
नववा आणि सर्वात महत्वाचा पैलू- ड्रायव्हरची गुणवत्ता. त्याचा वैशिष्टय़े इत्यादींशी फारसा संबंध नाही. बाजारात बर्याच ऑफर आहेत आणि कधीकधी दोन उत्पादकांच्या ड्रायव्हर्सची वैशिष्ट्ये जवळजवळ स्वल्पविरामाने जुळतात आणि त्यांना मशीनवर स्थापित केल्याने, हे स्पष्ट होते की उत्पादकांपैकी एक स्पष्टपणे त्यांचे कार्य करत नाही, आणि स्वस्त इस्त्रीच्या उत्पादनात तो अधिक भाग्यवान असेल. नवशिक्यासाठी काही अप्रत्यक्ष डेटा वापरून ड्रायव्हरची पातळी आधीच निश्चित करणे खूप कठीण आहे. तुम्ही स्मार्ट वैशिष्ट्यांच्या संख्येवर लक्ष केंद्रित करण्याचा प्रयत्न करू शकता, जसे की “स्टॉल डिटेक्ट” किंवा रेझोनान्स सप्रेशन, तसेच सिद्ध पद्धती वापरा - लक्ष्यीकरण ब्रँड.
स्टेपर मोटर्स मनोरंजक आहेत कारण ते आपल्याला एका विशिष्ट कोनात शाफ्ट फिरवण्याची परवानगी देतात. त्यानुसार, त्यांच्या मदतीने, आपण शाफ्टला ठराविक क्रांत्यांद्वारे वळवू शकता, कारण एन क्रांती देखील 360 * N च्या बरोबरीचा एक विशिष्ट कोन आहे, ज्यामध्ये क्रांत्यांच्या पूर्णांक नसलेल्या संख्येचा समावेश आहे, उदाहरणार्थ, 0.75 वळणे, 2.5 वळणे, 3.7 उलाढाल इ. स्टेपर मोटर्सच्या या क्षमता त्यांच्या अनुप्रयोगाची व्याप्ती निर्धारित करतात. ते मुख्यतः विविध उपकरणांच्या स्थानासाठी वापरले जातात: डिस्क ड्राइव्हमधील हेड वाचणे, प्रिंटर आणि प्लॉटर्समध्ये प्रिंट हेड इ.
साहजिकच, रेडिओ हौशी अशा संधींकडे दुर्लक्ष करू शकत नाहीत. होममेड रोबोट्स, होममेड सीएनसी मशीन इत्यादींच्या निर्मितीमध्ये ते यशस्वीरित्या स्टेपर्स वापरतात. स्टेपर मोटरसह माझ्या प्रयोगांचे परिणाम खाली वर्णन केले आहेत, मला आशा आहे की ते एखाद्यासाठी उपयुक्त ठरेल.
मग आम्हाला प्रयोगांची काय गरज आहे. प्रथम, स्टेपर मोटर. मी 5-व्होल्ट चायनीज द्विध्रुवीय स्टेपर घेतला आहे ज्यामध्ये एक गूढ नाव आहे, जुन्या 3.5 "ड्राइव्हमधून फाटलेले आहे, M20SP-GW15 सारखे आहे. दुसरे म्हणजे, मोटार विंडिंग्स लक्षणीय प्रवाह वापरत असल्याने (या प्रकरणात 300 एमए पर्यंत), ते आहे. अगदी समजण्यासारखे आहे की स्टेपरला थेट कंट्रोलरशी कनेक्ट करणे शक्य होणार नाही, ड्रायव्हर आवश्यक आहे.
द्विध्रुवीय स्टेपर मोटर्ससाठी ड्रायव्हर म्हणून, तथाकथित एच-ब्रिज सर्किट किंवा विशेष मायक्रोसर्किट (ज्यामध्ये अजूनही एच-ब्रिज बिल्ट इन आहे) वापरला जातो. नक्कीच, आपण ते स्वतःच शिल्प करू शकता, परंतु मी त्याच जुन्या ड्राईव्हमधून तयार मिक्रुहा (LB1838) घेतला. वास्तविक, वरील सर्व व्यतिरिक्त, आमच्या प्रयोगांसाठी आम्हाला देखील आवश्यक असेल: एक PIC नियंत्रक (PIC12F629 सर्वात स्वस्त म्हणून घेतले गेले होते) आणि दोन बटणे.
आपण थेट सर्किटवर जाण्यापूर्वी, थिअरीचा थोडासा सामना करूया.
द्विध्रुवीय स्टेपर मोटरला दोन विंडिंग आहेत आणि त्यानुसार, चार तारांद्वारे जोडलेले आहेत. आपण एका साध्या कॉलसह विंडिंग्सचे टोक शोधू शकता - समान वळणांशी संबंधित तारांचे टोक एकमेकांमध्ये वाजतील, परंतु भिन्न विंडिंगशी संबंधित टोके वाजणार नाहीत. पहिल्या वळणाचे टोक "a", "b" अक्षरांनी आणि दुसऱ्या वळणाचे टोक "c", "d" अक्षरांनी दर्शविले जातील.
प्रश्नातील नमुन्यात मोटरजवळील संपर्कांचे डिजिटल चिन्हांकन आणि तारांचे रंग चिन्हांकन आहे (देवाला माहीत आहे, कदाचित हे देखील काही प्रकारचे मानक आहे): 1 - लाल, 2 - निळा - प्रथम वळण; 3 - पिवळा, 4 - पांढरा - दुसरा वळण.
द्विध्रुवीय स्टेपर मोटर फिरण्यासाठी, टेबलमध्ये दर्शविलेल्या क्रमाने विंडिंग्स ऊर्जावान असणे आवश्यक आहे. जर टेबल ट्रॅव्हर्सलची दिशा वर्तुळात वरपासून खालपर्यंत निवडली असेल, तर इंजिन पुढे फिरेल, जर वर्तुळात तळापासून वरपर्यंत असेल, तर इंजिन मागे फिरेल:
एका पूर्ण चक्रात, इंजिन चार पायऱ्या करते.
योग्य ऑपरेशनसाठी, टेबलमध्ये दर्शविलेल्या स्विचिंगचा क्रम काटेकोरपणे पाळणे आवश्यक आहे. म्हणजेच, उदाहरणार्थ, दुसऱ्या कॉम्बिनेशननंतर (जेव्हा आम्ही आउटपुट "c" ला + आणि आउटपुट "d" ला वजा केला), आम्ही तिसरे कॉम्बिनेशन लागू करू शकतो (दुसरा वळण बंद करा आणि पहिल्याला लागू करा. "a" आणि + ते "b"), नंतर मोटर एक पाऊल पुढे वळेल, किंवा पहिले संयोजन (मोटर एक पाऊल मागे वळेल).
आपल्याला रोटेशन सुरू करण्यासाठी आवश्यक असलेले संयोजन इंजिन बंद करण्यापूर्वी लागू केलेल्या शेवटच्या संयोजनाद्वारे निर्धारित केले जाते (जोपर्यंत, अर्थातच, नंतर ते हाताने वळवले जात नाही) आणि रोटेशनची इच्छित दिशा.
म्हणजेच, आपण इंजिन 5 पावले पुढे वळवले, त्यावर 2-3-4-1-2 असे कॉम्बिनेशन लावले, नंतर ते डी-एनर्जी केले, आणि नंतर आम्हाला आणखी एक पाऊल पुढे वळवायचे होते. हे करण्यासाठी, विंडिंग्सवर कॉम्बिनेशन 3 लागू करणे आवश्यक आहे. समजा त्यानंतर आपण ते पुन्हा डी-एनर्जी केले, आणि काही काळानंतर आपल्याला ते 2 पावले मागे परत करायचे आहे, तर आपल्याला इंजिनवर 2-1 संयोजन लागू करणे आवश्यक आहे. आणि त्याच भावनेने.
हे सारणी, इतर गोष्टींबरोबरच, जर आपण विंडिंग्ज किंवा विंडिंग्जमधील टोके जोडण्याचा क्रम मिसळला तर स्टेपर मोटरचे काय होईल याचा अंदाज लावू देते.
येथेच आम्ही मोटरसह समाप्त करू आणि LB1838 ड्रायव्हरकडे जाऊ.
या मिक्रूहामध्ये चार नियंत्रण पाय आहेत (IN1, IN2, EN1, EN2), ज्यांना आम्ही कंट्रोलरकडून सिग्नल पाठवू आणि चार आउटपुट पाय (आउट1, आउट2, आउट3, आउट4), ज्याला मोटर विंडिंग्ज जोडलेले आहेत. विंडिंग खालीलप्रमाणे जोडलेले आहेत: वायर "a" Out1 ला, वायर "b" Out2 ला, वायर "c" ला Out3, वायर "d" Out4 ला जोडलेले आहे.
खाली ड्रायव्हर चिपसाठी सत्य सारणी आहे (इनपुटच्या स्थितीवर अवलंबून आउटपुटची स्थिती):
| IN1 | EN1 | आउट1(अ) | आउट2(ब) | IN2 | EN2 | Out3(c) | Out4(d) |
| कमी | उच्च | + | — | कमी | उच्च | + | — |
| उच्च | उच्च | — | + | उच्च | उच्च | — | + |
| एक्स | कमी | बंद | बंद | एक्स | कमी | बंद | बंद |
आता एका संपूर्ण रोटेशन सायकलसाठी IN1, EN1, IN2, EN2 चे सिग्नल कशा स्वरूपाचे असावेत ते आकृतीवर काढूया, म्हणजे. जेणेकरून विंडिंग कनेक्शनचे सर्व 4 संयोजन आउटपुटवर मालिकेत दिसून येतील:

या आकृतीकडे (डावीकडे) बारकाईने पाहिल्यास, हे स्पष्ट होते की IN1 आणि IN2 सिग्नल अगदी सारखेच बनवले जाऊ शकतात, म्हणजेच या दोन्ही पायांवर समान सिग्नल लागू केले जाऊ शकतात. या प्रकरणात, आमचे आकृती असे दिसेल:

तर, शेवटचा आकृती दर्शवितो की मोटर विंडिंग्स जोडण्यासाठी संबंधित जोड्या मिळविण्यासाठी ड्रायव्हरच्या नियंत्रण इनपुटवर सिग्नल पातळीचे कोणते संयोजन असावे (EN1, EN2, IN1, IN2) आणि बाण कोणत्या क्रमाने सूचित करतात इच्छित बाजूने रोटेशन सुनिश्चित करण्यासाठी हे संयोजन बदलले पाहिजेत.
मुळात हा संपूर्ण सिद्धांत आहे. नियंत्रण इनपुटवर आवश्यक स्तरांचे संयोजन नियंत्रकाद्वारे तयार केले जाते (आम्ही PIC12F629 वापरू).
योजना:
तयार साधन:


कंट्रोल प्रोग्राम खालील अल्गोरिदम लागू करतो: जेव्हा KN1 बटण दाबले जाते, तेव्हा इंजिन एका दिशेने एक पाऊल वळते आणि जेव्हा KN2 बटण दाबले जाते तेव्हा ते एक पाऊल दुसऱ्या दिशेने वळते.
खरं तर, आपण ते येथे स्क्रू करू शकता आणि संगणकावरून नियंत्रण लागू करू शकता (हस्तांतरण गती, चरणांची संख्या आणि संगणकावरून फिरण्याची दिशा).



