तपशील Mitsubishi Outlander वापरल्या जाणाऱ्या पॉवर प्लांटसाठी तीन पर्यायांद्वारे निर्धारित केले जाते. 2.0 आणि 2.4 लिटरचे दोन पेट्रोल “फोर्स” 146 आणि 167 एचपी उत्पादन करतात. अनुक्रमे सगळ्यात वरती मोटर लाइनआवृत्तीसाठी प्रदान केलेले 3.0-लिटर V6 इंजिन आहे मित्सुबिशी आउटलँडरखेळ. हे 230 एचपीची कमाल शक्ती विकसित करते. आणि 292 Nm (3750 rpm वर) टॉर्क जनरेट करते.
आउटलँडरच्या शीर्ष बदलामध्ये जोड्यांमध्ये स्थापना समाविष्ट आहे पॉवर युनिट 6-गती स्वयंचलित प्रेषणसंसर्ग क्रॉसओवरच्या इतर आवृत्त्या टॉर्क कन्व्हर्टरसह आठव्या पिढीच्या जॅटको सीव्हीटीने सुसज्ज आहेत. V6 टँडम 230 एचपी आणि 6 स्वयंचलित ट्रांसमिशन स्पोर्ट्स आवृत्ती प्रदान करते आउटलँडर चांगलेडायनॅमिक्स - कार 8.9 सेकंदात 100 किमी/ताशी वेग वाढवते. क्रॉसओव्हर व्हेरिएंट, जो 4-सिलेंडर युनिटपैकी एक जोडी हुड अंतर्गत लपवतो, अशा चपळतेचा अभिमान बाळगू शकत नाही, डॅशवर "शेकडो" पेक्षा जास्त 10 सेकंद खर्च करतो.
मित्सुबिशी आउटलँडरचा सरासरी इंधन वापर 7.3 ते 8.9 लिटर पर्यंत बदलतो. पासपोर्ट डेटानुसार, सर्वात "अतृप्त" अर्थातच 3.0-लिटर "सिक्स" आहे, शहरी चक्रात सुमारे 12.2 लिटर इंधन वापरते.
कार बॉडीचे भौमितिक पॅरामीटर्स प्रामुख्याने दृष्टीकोन आणि निर्गमन कोनांच्या समानतेमुळे मनोरंजक आहेत, त्यापैकी प्रत्येक 21 अंशांपेक्षा जास्त नाही. रॅम्पच्या कोनाचा समान अर्थ आहे. ग्राउंड क्लिअरन्स(क्लिअरन्स) मित्सुबिशी आउटलँडर 215 मिमी आहे.
जपानी क्रॉसओवर फ्रंट- आणि ऑल-व्हील ड्राइव्ह व्हर्जनमध्ये उपलब्ध आहे. फ्रंट-व्हील ड्राइव्ह केवळ “तरुण” 2.0-लिटर इंजिन असलेल्या आवृत्त्यांसाठी प्रदान केली जाते. ऑल-व्हील ड्राइव्हमध्ये दोन संभाव्य कॉन्फिगरेशन आहेत: सर्व चाककंट्रोल (AWC) आणि सुपर ऑल व्हील कंट्रोल (S-AWC). दुसरा पर्याय, जो हाय-स्पीड कोपऱ्यांमध्ये आणि निसरड्या पृष्ठभागावर स्थिरता जोडतो, विशेषतः आउटलँडर स्पोर्ट 3.0 साठी विकसित केला गेला.
मित्सुबिशी आउटलँडरची तांत्रिक वैशिष्ट्ये - सारांश सारणी:
| पॅरामीटर | आउटलँडर 2.0 CVT 146 hp | आउटलँडर 2.4 CVT 167 hp | आउटलँडर स्पोर्ट 3.0 AT 230 hp | |
|---|---|---|---|---|
| इंजिन | ||||
| इंजिनचा प्रकार | पेट्रोल | |||
| इंजेक्शन प्रकार | वितरित केले | |||
| सुपरचार्जिंग | नाही | |||
| सिलिंडरची संख्या | 4 | 6 | ||
| सिलेंडर व्यवस्था | इन-लाइन | V-आकाराचे | ||
| प्रति सिलेंडर वाल्व्हची संख्या | 4 | |||
| खंड, घन सेमी. | 1998 | 2360 | 2998 | |
| पॉवर, एचपी (rpm वर) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| संसर्ग | ||||
| ड्राइव्ह युनिट | समोर | पूर्ण (AWC) | पूर्ण (AWC) | पूर्ण (S-AWC) |
| संसर्ग | व्हेरिएबल स्पीड ड्राइव्ह | 6 स्वयंचलित प्रेषण | ||
| निलंबन | ||||
| समोरील निलंबनाचा प्रकार | स्वतंत्र मॅकफर्सन प्रकार | |||
| मागील निलंबनाचा प्रकार | स्वतंत्र, बहु-लिंक | |||
| ब्रेक सिस्टम | ||||
| फ्रंट ब्रेक्स | हवेशीर डिस्क | |||
| मागील ब्रेक्स | हवेशीर डिस्क | |||
| सुकाणू | ||||
| ॲम्प्लीफायर प्रकार | विद्युत | |||
| टायर आणि चाके | ||||
| टायर आकार | 215/70 R16 | 225/55 R18 | ||
| डिस्क आकार | 6.5Jx16 | 7.0Jх18 | ||
| इंधन | ||||
| इंधन प्रकार | AI-92 | AI-95 | ||
| टाकीची मात्रा, एल | 63 | 60 | 60 | |
| इंधनाचा वापर | ||||
| शहरी सायकल, l/100 किमी | 9.5 | 9.6 | 9.8 | 12.2 |
| एक्स्ट्रा-अर्बन सायकल, l/100 किमी | 6.1 | 6.4 | 6.5 | 7.0 |
| एकत्रित सायकल, l/100 किमी | 7.3 | 7.6 | 7.7 | 8.9 |
| परिमाणे | ||||
| जागांची संख्या | 5 | |||
| लांबी, मिमी | 4695 | |||
| रुंदी, मिमी | 1800 | |||
| उंची (रेल्ससह), मिमी | 1680 | |||
| व्हीलबेस, मिमी | 2670 | |||
| फ्रंट व्हील ट्रॅक, मिमी | 1540 | |||
| मागील चाक ट्रॅक, मिमी | 1540 | |||
| ट्रंक व्हॉल्यूम (किमान/कमाल), l | 591/1754 | 477/1640 | ||
| ग्राउंड क्लीयरन्स (क्लिअरन्स), मिमी | 215 | |||
| वजन | ||||
| कर्ब, किग्रॅ | 1425 | 1490 | 1505 | 1580 |
| पूर्ण, किलो | 1985 | 2210 | 2270 | |
| ट्रेलरचे कमाल वजन (ब्रेकसह), किग्रॅ | 1600 | |||
| डायनॅमिक वैशिष्ट्ये | ||||
| कमाल वेग, किमी/ता | 193 | 188 | 198 | 205 |
| 100 किमी/ताशी प्रवेग वेळ, से | 11.1 | 11.7 | 10.2 | 8.7 |
मित्सुबिशी आउटलँडर इंजिन - तांत्रिक वैशिष्ट्ये
क्रॉसओवरसाठी उपलब्ध असलेली तिन्ही इंजिने MIVEC व्हॉल्व्ह लिफ्ट कंट्रोल सिस्टमने सुसज्ज आहेत. हे आपल्याला वेगानुसार वाल्वचे ऑपरेटिंग मोड (उघडण्याची वेळ, फेज ओव्हरलॅप) बदलण्याची परवानगी देते, जे इंजिनची शक्ती वाढविण्यास, इंधनाची बचत करण्यास आणि हानिकारक उत्सर्जन कमी करण्यास मदत करते.
मित्सुबिशी आउटलँडर इंजिन वैशिष्ट्ये:
| पॅरामीटर | आउटलँडर 2.0 146 एचपी | आउटलँडर 2.4 167 एचपी | आउटलँडर 3.0 230 एचपी |
|---|---|---|---|
| इंजिन कोड | 4B11 | 4B12 | 6B31 |
| इंजिनचा प्रकार | टर्बोचार्जिंगशिवाय पेट्रोल | ||
| पुरवठा यंत्रणा | वितरित इंजेक्शन, इलेक्ट्रॉनिक प्रणाली MIVEC वाल्व नियंत्रण, दोन कॅमशाफ्ट (DOHC), टाइमिंग चेन ड्राइव्ह | वितरित इंजेक्शन, MIVEC इलेक्ट्रॉनिक वाल्व नियंत्रण प्रणाली, एक कॅमशाफ्ट प्रति सिलेंडर बँक (SOHC), टायमिंग बेल्ट ड्राइव्ह | |
| सिलिंडरची संख्या | 4 | 6 | |
| सिलेंडर व्यवस्था | इन-लाइन | V-आकाराचे | |
| वाल्वची संख्या | 16 | 24 | |
| सिलेंडर व्यास, मिमी | 86 | 88 | 87.6 |
| पिस्टन स्ट्रोक, मिमी | 86 | 97 | 82.9 |
| संक्षेप प्रमाण | 10:1 | 10.5:1 | |
| कार्यरत व्हॉल्यूम, क्यूबिक मीटर सेमी. | 1998 | 2360 | 2998 |
| पॉवर, एचपी (rpm वर) | 146 (6000) | 167 (6000) | 230 (6250) |
| टॉर्क, N*m (rpm वर) | 196 (4200) | 222 (4100) | 292 (3750) |
मित्सुबिशी आउटलँडर ऑल-व्हील ड्राइव्ह सिस्टम
ऑल व्हील कंट्रोल (AWC) हे फ्रंट-व्हील ड्राइव्ह कॉन्फिगरेशन आहे जे इलेक्ट्रॉनिकरित्या नियंत्रित इलेक्ट्रोमॅग्नेटिक क्लच वापरून मागील एक्सलला जोडते. 50% पर्यंत थ्रस्ट मागील दिशेने निर्देशित केले जाऊ शकते. AWC ड्राइव्हचे तीन ऑपरेटिंग मोड आहेत - ECO, ऑटो आणि लॉक. इकॉनॉमी मोडमध्ये, सर्व टॉर्क डिफॉल्टनुसार समोरच्या एक्सलमध्ये हस्तांतरित केले जातात आणि मागील एक्सल फक्त स्लिप करताना वापरला जातो. प्राप्त केलेल्या आधारावर ऑटो मोड चांगल्या प्रकारे शक्ती वितरीत करतो इलेक्ट्रॉनिक युनिटडेटा (चाक गती, प्रवेगक पेडल स्थिती). ब्लॉकिंग मोड प्रति ट्रांसमिशनचे प्रमाण वाढवते मागील चाकेटॉर्कचे, जे अस्थिर पृष्ठभागांवर आत्मविश्वासपूर्ण प्रवेग आणि अधिक स्थिर वर्तनाची हमी देते. लॉक आणि ऑटोमधला मुख्य फरक असा आहे की स्लिप सापडली की नाही याची पर्वा न करता मागील चाकांना सुरुवातीला जास्त कर्षण मिळते. 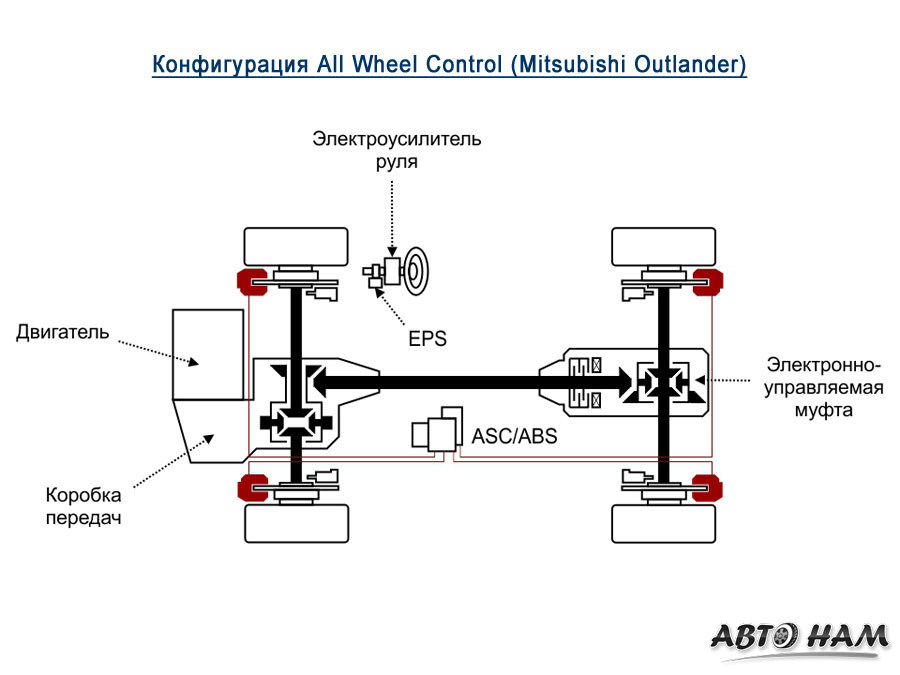
सुपर ऑल व्हील कंट्रोल (S-AWC) हे पारंपारिक AWC चे एक प्रगत रूपांतर आहे, ज्यामध्ये चाकांमधील बल वितरीत करून, पुढच्या एक्सलवर सक्रिय भिन्नता (AFD) स्थापित केली जाते. अशा प्रकारे, कारच्या वर्तनावर लक्ष ठेवण्यासाठी एक अतिरिक्त यंत्रणा दिसून येते. S-AWC मध्ये स्थिरीकरण प्रणाली, ABS, इलेक्ट्रिक पॉवर स्टीयरिंग आणि ब्रेकिंग प्रणाली समाविष्ट आहे. होय, नियंत्रण युनिट सुपर सिस्टमसर्व व्हील कंट्रोल, विशिष्ट परिस्थितीत, व्हील ब्रेकिंग सुरू करू शकते, उदाहरणार्थ, कॉर्नरिंग करताना वाहून गेल्यास.
S-AWC ऑल-व्हील ड्राइव्ह मोड सिलेक्टरमध्ये चार पोझिशन्स आहेत: इको, नॉर्मल, स्नो आणि लॉक. "स्नो" मोड निसरड्या पृष्ठभागांवर ड्रायव्हिंगसाठी सिस्टम सेटिंग्ज ऑप्टिमाइझ करतो. 
कदाचित, जेव्हा जेव्हा आपण “नवीन”, “क्रांतिकारक”, “अतुलनीय” हे शब्द पाहतो तेव्हा आपल्याला काहीतरी मजेदार उद्गार काढायचे असतात. सायकलबद्दल आणि शोधकर्त्यांबद्दल, कुत्र्यांबद्दल आणि अवयवांच्या संख्येबद्दल किंवा तितकेच व्यंग्यात्मक काहीतरी. तथापि, सामान्य ज्ञान आपल्याला सांगते की ते इतके सोपे नाही. कार नेहमी इलेक्ट्रॉनिक स्थिरीकरण प्रणालीसह सुसज्ज नसतात; एके काळी, आता परिचित ABS प्रथमच कारमध्ये सादर केले गेले. आजचे काय? ABS ची अनुपस्थिती अनेकदा गोंधळात टाकते आणि ESP आधीच सर्वांवर स्थापित करण्यासाठी अनिवार्य उपकरण बनले आहे. प्रवासी गाड्याकॅनडा, यूएसए आणि अलीकडे युरोपमध्ये. मग एमएमसी अभियंते आम्हाला काय नवीन ऑफर करतात? चला ते शोधण्याचा प्रयत्न करूया.
काटेकोरपणे सांगायचे तर, S-AWC हे संक्षेप आपल्यासाठी आधीच परिचित आहे. ही प्रणाली प्रथम पौराणिक वर वापरली गेली मित्सुबिशी लान्सरइव्हो एक्स. आणि तरीही, मित्सुबिशीचे प्रतिनिधी आग्रह करतात की जरी "अक्षरे समान आहेत" नवीन आउटलँडरसर्व काही थोडे वेगळे केले आहे. आणि सर्वसाधारणपणे, S-AWC हा एक विशिष्ट उपाय नाही, युनिट्सचा एक संच, एक वैचारिक संकल्पना म्हणून, ज्याचे सार, जर आपण छोट्या गोष्टींकडे दुर्लक्ष केले तर, अंडरस्टीयर असताना कारला तटस्थ स्टीयरिंग प्रदान करणे. किंवा ओव्हरस्टीअर विकसित होते, तसेच रस्त्यासह ड्राइव्हच्या चाकांची इष्टतम पकड सुनिश्चित करण्यासाठी.
हे कसे साध्य होते? उत्क्रांतीमध्ये सिस्टममध्ये खालील युनिट्सचा समावेश होता:
ॲक्टिव्ह सेंटर डिफरेंशियल (ACD), जे मूलत: इलेक्ट्रॉनिक नियंत्रित हायड्रॉलिक आहे मल्टी-प्लेट क्लच, ज्याचे मुख्य कार्य म्हणजे पुढील/मागील अक्षांवर टॉर्क ट्रान्सफर ऑप्टिमाइझ करण्यासाठी आणि नियंत्रणक्षमता राखून संतुलित कर्षण सुनिश्चित करण्यासाठी केंद्र भिन्नता अधिक "सॉफ्ट, स्मूथ लॉकिंग" दरम्यान टॉर्क वितरीत करणे.
ॲक्टिव्ह यॉ कंट्रोल (AYC) कॉर्नरिंग करताना स्थिरता प्रदान करण्यासाठी मागील चाकांमधील टॉर्क वितरण व्यवस्थापित करते आणि अधिक कर्षण असलेल्या चाकामध्ये पॉवर हस्तांतरित करण्यासाठी भिन्नता अंशतः लॉक करू शकते.
सक्रिय स्थिरता नियंत्रण (एएससी) आवश्यक असल्यास इंजिनला थ्रोटल करून आणि समायोजित करून वाहनाच्या चाकांना सर्वोत्तम संभाव्य कर्षण प्रदान करते ब्रेकिंग फोर्सप्रत्येक चाकावर. हे लक्षात घ्यावे की या प्रणालीची असामान्यता अशी होती की एमएमसीने प्रथम फोर्स सेन्सर सादर केले. ब्रेकिंग सिस्टम(अशा प्रणालींसाठी मानक सेन्सर व्यतिरिक्त - एक एक्सीलरोमीटर आणि स्टीयरिंग व्हील पोझिशन सेन्सर), ज्याने सिस्टमला अधिक अचूक डेटा प्रदान केला आणि परिणामी, अधिक पुरेसा प्रतिसाद.
आणि शेवटी, कर्षण नियंत्रण प्रणाली(ABS) स्पोर्ट सेटिंगसह. प्रणाली प्रत्येक चाकाच्या फिरण्याच्या गतीचा डेटा आणि पुढील चाकांच्या कोनावरील डेटा प्राप्त करते आणि ब्रेक सिस्टम सोडण्यासाठी किंवा त्याउलट, प्रत्येक वैयक्तिक चाक ब्रेक करण्यासाठी वापरते.
आउटलँडरबद्दल काय? होय, हा योगायोग नाही की आम्ही S-AWC प्रणालीच्या घटकांचे इतक्या तपशीलवार परीक्षण केले. लान्सर इव्होनवीन क्रॉसओवरवर जाण्यापूर्वी X. येथे कंपनीचे अभियंते खोटे बोलत नाहीत; लॅन्सर आणि आमच्या कारवरील सिस्टम खरोखर संरचनात्मकदृष्ट्या भिन्न आहेत, जसे आपण आता पाहू. तर, आउटलँडरच्या नवीन ऑल-व्हील ड्राइव्ह सिस्टममध्ये कोणते युनिट समाविष्ट केले आहेत?

सक्रिय फ्रंट डिफरेंशियल (AFD). समोरच्या एक्सलच्या चाकांमधील टॉर्कचे वितरण नियंत्रित करते.
इलेक्ट्रिक पॉवर स्टीयरिंग (EPS). हे S-AWC ऑल-व्हील ड्राइव्ह सिस्टीमला नियुक्त केले आहे हा योगायोग नाही. पुढील चाकांवर टॉर्कच्या पुनर्वितरण दरम्यान उद्भवलेल्या स्टीयरिंग व्हीलवरील प्रतिक्रियाशील शक्तींसाठी अनुकूलपणे भरपाई करणे हे त्याचे कार्य आहे, परिस्थितीमध्ये आरामदायक स्टीयरिंग प्रदान करणे. सक्रिय कार्यए.एफ.डी.
इलेक्ट्रोमॅग्नेटिक कपलिंग. मागील एक्सल कनेक्ट करते, मागील एक्सलवर प्रसारित टॉर्कचे नियमन करते.
S-AWC कंट्रोल युनिट. पारंपारिक प्रणालींच्या विपरीत, ते वाहनाच्या हालचालीची दिशा तसेच कोनीय वेग आणि बाजूकडील भार निर्धारित करण्यासाठी प्रवेग सेन्सरचा विस्तारित संच वापरते.
फरक काय आहे? व्यक्तिशः, दोघांनी माझे लक्ष वेधले आणि ते खूप गंभीर होते. फ्रंट एक्सलवर, मर्यादित स्लिप डिफरेंशियलऐवजी, आमच्याकडे आता आंशिक लॉकिंग क्षमता आणि चाकांमध्ये टॉर्क वितरीत करण्याची क्षमता असलेले नियंत्रित फ्रंट डिफरेंशियल आहे. अर्थात, गाडी चालवताना अशी यंत्रणा चालू केल्यास त्याचा ड्रायव्हिंगवर विपरीत परिणाम होऊ शकतो. सर्वोत्तम शक्य मार्गाने. स्टीयरिंग व्हीलवरील सर्व काम आम्हाला रिऍक्टिव्ह फोर्सच्या रूपात वाटेल - धक्के, आणि सर्वात सोयीस्कर वेळी नाही, कारण हे स्पष्ट आहे की ड्रायव्हिंगची परिस्थिती सौम्यपणे, प्रतिकूल असताना सिस्टम कार्य करेल. .
परंतु येथे आणखी एक उपप्रणाली कार्यरत आहे, ती म्हणजे इलेक्ट्रिक पॉवर स्टीयरिंग. हे फ्लायवरील बूस्टला अनुकूल करते, सक्रिय क्लच चालू असताना स्टीयरिंग व्हीलवरील प्रतिक्रिया शक्तीतील बदलांची भरपाई करते. समोर भिन्नता. आणि हे सर्व ड्रायव्हरला जवळजवळ अगम्य आहे आणि नियंत्रण न गमावता.
अशा प्रकारे, आमच्याकडे कारच्या वर्तनावर प्रभाव टाकण्यासाठी पुरेसा साधनांचा संच आहे आणि इतर सर्व काही अभियंत्यांच्या हातात आहे जे या सर्व साधनांसह आमच्यासाठी नियंत्रण प्रणाली प्रोग्राम आणि कॉन्फिगर करतात. ते आम्हाला काय देत आहेत?
आणि ते ड्रायव्हरला सिस्टम ऑपरेशनचे चार मोड देतात.
मित्सुबिशी आउटलँडर 2.4 AT त्याच्या कमाल बोर्टझर्नल येथे "कायम" ऑल-व्हील ड्राइव्हबद्दल संपूर्ण सत्य
काही काळापूर्वी मी माझ्या ATV वर कसे अडकलो याबद्दल येथे लिहिले होते.
या घटनेने मला थोडेसे चिडवले आणि मी स्नोड्रिफ्टमधून बाहेर पडू शकलो नाही या संपूर्ण ड्राइव्हबद्दल मला खूप उत्सुकता लागली.
आणि मी Google वर गेलो आणि मंच वाचले, आणि मी याची कल्पना करतो.
ऑल-व्हील ड्राइव्ह दोन मोठ्या गटांमध्ये विभागली गेली आहे, स्थिरपूर्ण आणि प्लग-इन.
स्थिर. हा क्षण प्रत्येकाला प्रसारित केला जातो तेव्हा 4
चाके, उदाहरणार्थ, माझा जीपरा 🙂 यापैकी एक
प्लग-इन मॉड्यूल. जेव्हा कार प्रामुख्याने एका एक्सलने चालविली जाते, जसे की फ्रंट एक्सल, आणि जेव्हा ड्राईव्ह एक्सल सरकते तेव्हा ते निष्क्रिय होण्याआधी ते आपोआप गुंतते (तुम्ही ते बटणांसह देखील चालू करू शकता, परंतु सामान्यतः फक्त कमी वेगाने किंवा crap, t for a while), आउट XL वर एक समान प्रणाली आणि आधुनिक SUV चे बहुसंख्य.
जसे तुम्ही समजता, मला पहिल्या प्रकारच्या ऑल-व्हील ड्राइव्हमध्ये स्वारस्य होते, कायमस्वरूपी.
तो वाण एक घड विभागली आहे की बाहेर वळते.
हेही वाचा
पण प्रथम, एक छोटा सिद्धांत :)
विभेदक. या यांत्रिक उपकरण, जे चाकांना फिरवण्यास अनुमती देते वेगवेगळ्या वेगाने.
आणि हे यादृच्छिकपणे केले जाणे आवश्यक आहे, कारण वळणांमध्ये चाके वेगवेगळ्या वेगाने फिरतात आणि वळण अधिक आरामदायक बनविण्यासाठी आणि टायरचा त्रास टाळण्यासाठी, भिन्नता आपल्याला या चाकांमधील टॉर्क वेगवेगळ्या प्रमाणात वितरित करण्यास अनुमती देते.
ऑल-व्हील ड्राइव्ह वाहनात, उदाहरणार्थ पहिल्या भिन्नतेमध्ये आउटलँडर प्रथमपिढ्या प्रत्येक अक्षासाठी एक. समोर आणि मागील कणा, जे संबंधित एक्सलवरील चाकांमध्ये टॉर्क वितरीत करण्यासाठी काम करतात, तसेच इंटरएक्सल एक्सल, जो एक्सल दरम्यान टॉर्क वितरीत करतो.
मित्सुबिशी आउटलँडर S-AWC ऑल-व्हील ड्राइव्ह कसे कार्य करते
काम पूर्ण ड्राइव्हमित्सुबिशी आउटलँडर (कारमध्ये ईएसपी नाही).
कास्टरवर मित्सुबिशी आउटलँडर AWD कसे कार्य करते?
[ईमेल संरक्षित] www.diffblock.com vk.com/diffblock मित्सुबिशी आउटलँडर 2013. (2.4l 200hp). चाचणी चार चाकी ड्राइव्ह .
अशाप्रकारे, माय आउटमध्ये, जेव्हा ते सपाट पृष्ठभागावर उभे असते, तेव्हा क्षण सर्व चाकांवर समान भागांमध्ये वितरित केला जातो, म्हणजेच 25% (तसे, हे सर्वत्र नाही, सुबारूमध्ये, उदाहरणार्थ, त्यानुसार एक्सलच्या वितरणासाठी, जे 90% प्रमाणे फ्रंट एक्सल 10% मागील बाजूस आहे).
हेही वाचा
पण पकड अशी आहे की डिफरेंशियल बहुतेक वेळा कमी लोड केलेल्या चाकाकडे हस्तांतरित करते आणि म्हणून, जेव्हा एक चाक घसरते किंवा सरकते तेव्हा सर्व टॉर्क त्याकडे जातो, तर इतर चाके स्थिर असतात!
हे होण्यापासून रोखण्यासाठी, विभेदक लॉक आहेत. जो नेहमी धुरा आणि चाकांना समान वेळ प्रसारित करू शकतो.
आणि किल्ले एक असू शकतात. इंटरॲक्सल, नंतर क्षण दोन्ही अक्षांच्या बरोबरीने प्रसारित केला जातो, परंतु कमीतकमी प्रतिकाराच्या आधारावर चाकांमध्ये धुरासह वितरित केला जातो, म्हणून एका लॉकसह दोन चाके, एक मागील आणि एक समोर स्टॉल असणे पुरेसे आहे, जेणेकरून कार उभी राहू शकते.
आणि अनेक. प्रत्येक चाकाच्या प्रत्येक एक्सलवर प्लस एक्सलवर, नंतर सर्व चाके अडकेपर्यंत कार फिरते :)
आणि इथे कठीणलॉकिंग, म्हणजे, बटण दाबून तुम्ही जबरदस्तीने डिफरेंशियल लॉक करता आणि सर्व चाके नेहमी समान वेळ देतात, यामुळे गोंधळात मदत होते आणि नंतर, किमान एक चाककठोर पृष्ठभागावर, दुसरीकडे, ते हिंसकपणे फिरेल, नियंत्रणात व्यत्यय आणेल.
तसेच आहेत ऑटोउदाहरणार्थ, ऑन माय आउट विथ विसकोमुफ्टी, जो एक प्रकारचा कचरा आहे ज्यामध्ये जेलीसारखे द्रव आहे, जेव्हा आपण चुकतो तेव्हा तेथे काहीतरी राग येऊ लागतो, आत द्रवजाड होते आणि विभेदक अक्षांच्या दरम्यान अवरोधित केले जाते,
पण व्हिस्कोमुफ्टा हे ऑफ-रोड स्ट्रेसाठी सर्वात सोयीस्कर नाही. हे बर्याच काळासाठी चालते आणि मला समजते की ते विनामूल्य एक्सलच्या प्रामाणिक 50% व्यक्त करत नाही.
आणि आता माझा केस, उजवा समोर, जो मी हवेत होतो आणि हिंसकपणे, त्यानुसार, डावीकडे वळलो पुढे क्षणअजिबात उलटले नाही, परंतु व्हिस्कस कपलिंगच्या मागील एक्सलवर ते टॉर्कच्या काही भागाने विस्थापित झाले होते, परंतु वरवर पाहता हे मागील एक्सलला स्नोड्रिफ्टमधून पुढचा भाग बाहेर काढण्यासाठी पुरेसे नव्हते, म्हणून मी ते उडवत नाही तोपर्यंत वर, मी हलवू शकत नाही.
इलेक्ट्रॉनिक पद्धतीने नियंत्रित ऑल-व्हील ड्राइव्ह सिस्टीममध्ये तीन ऑपरेटिंग मोड आहेत जे रस्त्याच्या परिस्थितीनुसार स्विच फिरवून निवडले जाऊ शकतात.
ड्रायव्हिंग मोड खालीलप्रमाणे आहेत.
फोर-व्हील ड्राईव्ह वाहन चालवण्यासाठी विशेष ड्रायव्हिंग कौशल्य आवश्यक आहे.
कृपया "ऑल-व्हील ड्राइव्ह सिस्टम वापरणे" विभाग काळजीपूर्वक वाचा आणि सुरक्षित ड्रायव्हिंगचा सराव करा.
प्रज्वलन चालू ठेवून स्विच फिरवून मोड निवडला जातो.
- 4WD ऑटो
- 4WD लॉक
जेव्हा ड्रायव्हिंग मोड स्विच केला जातो, तेव्हा नवीन मोड मल्टीफंक्शन डिस्प्लेच्या माहिती विंडोमध्ये प्रदर्शित होतो, तात्पुरते वर्तमान प्रदर्शनात व्यत्यय आणतो.
काही सेकंदांनंतर, मागील विंडो पुन्हा डिस्प्लेवर दिसेल.
चेतावणी
- समोरची चाके घसरत असताना (उदाहरणार्थ, बर्फात) ड्रायव्हिंग मोड स्विच करण्यास मनाई आहे. या प्रकरणात, कार अनपेक्षित दिशेने धक्का बसू शकते.
- कोरड्या पक्क्या रस्त्यावर 4WD लॉक मोडमध्ये वाहन चालवल्याने परिणाम होतो वाढीव वापरइंधन आणि वाढलेली आवाज पातळी.
- चाके घसरत असल्यास 2WD मोडमध्ये चालविण्याची शिफारस केलेली नाही.
यामुळे ट्रान्समिशन घटक आणि असेंब्ली जास्त गरम होऊ शकतात.
नोंद
ड्रायव्हिंग मोड पार्क केलेले असताना आणि गाडी चालवताना दोन्ही स्विच केले जाऊ शकते.
प्रज्वलन चालू असताना डिस्प्ले विंडो दिसते, त्यानंतर इंजिन सुरू झाल्यानंतर काही सेकंदांसाठी ते प्रदर्शित होते. 
डिस्प्ले खालील ड्रायव्हिंग मोड डिस्प्ले दाखवतो.
| ड्रायव्हिंग मोड | ||
|---|---|---|
| 4WD निर्देशक | लॉक सूचक | |
| 2WD | बंद केले | बंद केले |
| 4WD ऑटो | समाविष्ट | बंद केले |
| 4WD लॉक | समाविष्ट | समाविष्ट |
चेतावणी

सर्वात सामान्य "खरे" ऑल-व्हील ड्राइव्ह डिझाइन जवळजवळ सर्व मूळ फ्रंट-व्हील ड्राइव्ह मॉडेल्सवर वापरले गेले. तीन भिन्नता आहेत, केंद्र भिन्नता (स्थीत, विशिष्ट लेआउटवर अवलंबून, गिअरबॉक्स गृहनिर्माण किंवा हस्तांतरण केस गृहनिर्माण मध्ये) अवरोधित केले आहे आणि टॉर्क अक्षांमध्ये समान रीतीने वितरीत केला आहे. हे तत्त्व समान आहे.
- साधक - रस्त्यावर स्थिरता, वर्तनाची सापेक्ष अंदाज, चांगली क्रॉस-कंट्री क्षमता आणि विश्वासार्हता.
- तोटे - चिपचिपा कपलिंगचे अपुरे ब्लॉकिंग गुणांक आणि त्याच्या "ऑपरेशन" चा वेग.
| मॉडेल | फेरफार |
| लान्सर-मिरेज-लिबेरो | (CCxA*) हॅच. 1991-1996, (CDxA) sed. 1991-1996, (CDxW) वॅग. 1992-1999 |
| लान्सर-मृगजळ | (CLxA) 1996-2001 (हॅचबॅक), (CMxA) 1996-2000 (सेडान) |
| लान्सर | उत्क्रांती IV (CN9A) 1996.09-1998.02, AYC - GSR साठी पर्याय |
| लान्सर | Evolution V (CP9A) 1998.02-1999.01, AYC - GSR99 साठी पर्याय, विश्रांती. - LSD (RS/GSR99) |
| लान्सर | उत्क्रांती VI (CP9A) 1999.01-2000.03, GSR2000 साठी AYC |
| Galant-Emeraude-Eterna | (E7xA, E8xA) 1992-1996 |
| गॅलेंट-लेग्नम | (ECxA, ECxW) 1996-2003 |
| गॅलेंट-लेग्नम | (EC5A/EC5W) VR-4 (सर्वांसाठी AYC) 1996-2002 |
| RVR | (N1xW/N2xW) 1991 - 1997.08 |
| RVR | (N6xW/N7xW) 1997.09 - 2003.01 |
| रथ/ग्रँडिस | (N3xW/N4xW) 1992.06 - 1997.07 |
| रथ/ग्रँडिस | (N8xW/N9xW) 1997.08 - 2002 |
| डायमँटे-सिग्मा | (F2xA) (सेडान) 1990.05-1994.11 |
| डायमंटे | (F4xA) (सेडान) 1994.12-2002.10 |
| GTO/3000GT | (Z1xA) 1990.10-2000.09 |
| एअरट्रेक/आउटलँडर | (CUxW) 2001.03-… |
[संकुचित]
V.C.U.
उघड करण्यासाठी...
पूर्ण वाढ झालेल्या 4WD पासून हळूहळू दूर जाण्याला सर्व जपानी वाहन निर्मात्यांनी समर्थन दिले आणि MMC अपवाद नव्हता.
व्हीसीयू (व्हिस्कस कपलिंग युनिट) ची योजना टोयोटाच्या व्ही-फ्लेक्स II सारखीच आहे - त्यात कोणताही मध्यवर्ती फरक नाही, तो क्षण ड्राइव्हशाफ्टच्या मागील बाजूने निर्देशित केला जातो, जिथे तो गिअरबॉक्सच्या समोर स्थापित केला जातो, ट्रिगर केला जातो आणि ड्राइव्हशाफ्टला जोडतो. टांग आणि इनपुट शाफ्टसमोरच्या चाकांच्या लक्षणीय स्लिपिंगसह गिअरबॉक्स. उर्वरित वेळ कार फ्रंट-व्हील ड्राइव्ह राहते. एक पर्यायी मागील घर्षण एलएसडी भिन्नता स्थापित केली गेली.
- साधक: साधेपणा आणि कमी खर्च.
- तोटे - सक्रिय ड्रायव्हिंग दरम्यान अयोग्य वर्तन, अपुरा ब्लॉकिंग गुणांक, कमी प्रतिसाद गती.
| मॉडेल | फेरफार |
| लान्सर-सीडिया | (CSxA, CSxW) 2000.05-… |
| मृगजळ डिंगो | (CQxA) 1999.01-2002.12 |
| डायोन | (CRxW) 2000.01-… |
| eK स्पोर्ट-वॅगन-क्लासी | (H81W) 2001.09-… |
| eK सक्रिय | (xBA-H81W) 2004.05 -… |
| मिनिका | (H12V/H15A) 1984-1988 |
| मिनिका | (H26A/H27A/H27V) 1990.02-1993.08 |
| मिनिका | (H36A/H37A) 1993.08-1998 |
| मिनिका | (H46A/H47A) 1998.08-… |
| मिनिका टोपो | (H27A/H27V) 1990.02-1993.08 |
| मिनिका टोपो | (H36A/H37V) 1993.08-1997.10 |
| ToppoBJ | (H46A/H47A) 1998.08-2003.08 |
| ToppoBJ वाइड | (H48A) 1998.08-2001.06 |
| कोल्ट न्यू | (Z2xA) 2002.11-… |
| कोल्ट प्लस नवीन | (Z2xW) 2004.10-… |
[संकुचित]
एकाधिक निवडा
उघड करण्यासाठी...
अर्थात, इलेक्ट्रोमेकॅनिकल क्लचला जोडलेल्या मागील एक्सलसह आता फॅशनेबल स्कीम, जी संबंधित आहे, ती बाजूला उभी राहिली नाही.
 "2WD" मोडमध्ये, ड्राइव्ह फक्त पुढच्या चाकांवर चालते. “4WD” मोडमध्ये, सामान्य परिस्थितीत पुढील चाके गुंतलेली असतात, परंतु, ड्रायव्हिंगच्या परिस्थितीनुसार, कंट्रोल युनिट स्वयंचलितपणे मागील एक्सलवर टॉर्कचे पुनर्वितरण करू शकते. "लॉक" मोडमध्ये (नाही उच्च गती) क्लच पूर्णपणे अवरोधित आहे, आणि टॉर्क एक्सलमध्ये जवळजवळ समान प्रमाणात विभागलेला आहे.
"2WD" मोडमध्ये, ड्राइव्ह फक्त पुढच्या चाकांवर चालते. “4WD” मोडमध्ये, सामान्य परिस्थितीत पुढील चाके गुंतलेली असतात, परंतु, ड्रायव्हिंगच्या परिस्थितीनुसार, कंट्रोल युनिट स्वयंचलितपणे मागील एक्सलवर टॉर्कचे पुनर्वितरण करू शकते. "लॉक" मोडमध्ये (नाही उच्च गती) क्लच पूर्णपणे अवरोधित आहे, आणि टॉर्क एक्सलमध्ये जवळजवळ समान प्रमाणात विभागलेला आहे.
- साधक - मागील चाकांचे कनेक्शन व्हीसीयू योजनेपेक्षा "अधिक हुशारीने" केले जाते; हार्ड ऑल-व्हील ड्राइव्ह व्यस्त ठेवणे शक्य आहे.
- बाधक - फार उच्च जगण्याची क्षमता नाही; 4WD मोडमध्ये ऑपरेशनची अपुरीता.
[संकुचित]
ACD+AYC
उघड करण्यासाठी...
हे मान्य केलेच पाहिजे की जगातील सर्वात प्रगत पॅसेंजर ऑल-व्हील ड्राइव्ह प्रणाली MMC ने विकसित केली होती - लान्सर इव्होल्यूशनच्या वेगवेगळ्या पिढ्यांसाठी.
एक केंद्र भिन्नता आहे, इलेक्ट्रॉनिक नियंत्रित हायड्रोमेकॅनिकल क्लच (ACD) द्वारे स्वयंचलितपणे लॉक केली जाते आणि ड्रायव्हर त्याच्या लॉकिंगची "कठोरता" स्वतंत्रपणे निवडू शकतो.
दुसरा सर्वात महत्वाचा घटक सक्रिय आहे मागील भिन्नता(AYC). हे आपल्याला पृष्ठभाग, स्टीयरिंग व्हील आणि प्रवेगक पेडलची स्थिती, चाकाचा वेग आणि वाहनाचा वेग यावर अवलंबून, इंजिनमधून डाव्या आणि उजव्या मागील चाकांवर प्रसारित होणारा टॉर्क समायोजित करण्यास अनुमती देते. वळणादरम्यान, सर्वात मोठा टॉर्क बाह्य चाकाकडे जातो, ज्यामुळे अतिरिक्त टर्निंग टॉर्क तयार होतो. निसरड्या किंवा असमान पृष्ठभागांवर, AYC मर्यादित-स्लिप डिफरेंशियल बदलते (सर्वात मोठा टॉर्क सर्वोत्तम पकड असलेल्या चाकाकडे जातो). पासून सुरुवात केली उत्क्रांती आठवाएक सुधारित सुपर-AYC डिफरेंशियल वापरला जातो, जो शंकूच्या आकाराऐवजी वेगळा असतो आणि त्यात फीडबॅक कंट्रोल सर्किट असते.
- साधक: क्रॉस-कंट्री क्षमता, नियंत्रणक्षमता, जास्तीत जास्त "बुद्धिमत्ता".
- तोटे - डिझाइन अधिक क्लिष्ट आणि अधिक महाग होते.
[संकुचित]
अर्धवेळ (सहज निवड)
उघड करण्यासाठी...
 4WD च्या सर्वात सोप्या प्रकारांपैकी एक (काही मॉडेल्सवर याला EasySelect म्हटले जाते) - प्लग-इन फ्रंट एक्सलसह, केंद्र भिन्नताशिवाय - सुरुवातीला मागील-चाक ड्राइव्ह मॉडेल्सवर वापरले जाते.
4WD च्या सर्वात सोप्या प्रकारांपैकी एक (काही मॉडेल्सवर याला EasySelect म्हटले जाते) - प्लग-इन फ्रंट एक्सलसह, केंद्र भिन्नताशिवाय - सुरुवातीला मागील-चाक ड्राइव्ह मॉडेल्सवर वापरले जाते.
या योजनेत लीव्हर वापरून ट्रान्सफर केसचे थेट नियंत्रण करण्याची तरतूद आहे. सुरुवातीला, फ्रंट ड्राइव्ह शाफ्ट मॅन्युअल किंवा स्वयंचलित ड्राइव्हसह यांत्रिक फ्रीव्हील्स ("हब") द्वारे चाकांशी जोडलेले होते. अगदी अलीकडील मॉडेल्सवर, फ्रंट एक्सल कनेक्ट करण्याची प्रक्रिया सुलभ करण्यासाठी, ADD सिस्टम वापरली जाते, जी वायवीय ड्राइव्ह वापरून, फ्रंट एक्सल शाफ्टपैकी एक डिस्कनेक्ट करते.
- साधक - डिझाइनची सापेक्ष साधेपणा, कपात गियरची उपस्थिती.
- बाधक - “4WD” मोड फक्त वापरला जाऊ शकतो निसरडा पृष्ठभाग(बर्फ, बर्फ, ओला रस्ता) आणि मर्यादित काळासाठी - अन्यथा आवाज आणि इंधनाचा वापर वाढतो, हाताळणी बिघडते, टायर आणि ट्रान्समिशन घटक स्वतःच मोठ्या प्रमाणात झिजतात. "मॅन्युअल" हब विश्वासार्ह आहेत, परंतु वापरण्यास फार सोयीस्कर नाहीत आणि स्वयंचलित हब टिकून राहण्याच्या बाबतीत आदर्श नाहीत.
| मॉडेल | फेरफार |
| पजेरो तिसरा | (V64W/V74W) 1999.06-… (पर्यायी - मागील हायब्रीड LSD / DiffLock) |
| चॅलेंजर/पाजेरोस्पोर्ट/मॉन्टेरो स्पोर्ट | (K9xW) 1996.05-… (पर्यायी - मागील हायब्रिड LSD) |
| L200/Strada | (K7xT) 1996.12-… (पर्यायी - मागील घर्षण एलएसडी / डिफ्लॉक) |
| डेलिका स्पेस गियर | (PDxW/PExW/PFxW) 1994.03-… (पर्यायी - मागील घर्षण एलएसडी / हायब्रिड एलएसडी) |
| पजेरो II | (V2xW/V4xW) 1990.10-1999.11 (पर्यायी - मागील घर्षण एलएसडी / हायब्रिड एलएसडी / डिफ्लॉक) |
| L200/Strada | (K3xT) 1991.03-1997.05 (पर्यायी - मागील घर्षण LSD) |
| डेलिका स्टार वॅगन/L300 | 1987.09-1999.06 (P2xW/P3xW/P4xW) (पर्यायी - मागील घर्षण LSD) |
| पजेरो मिनी | (H56A/H58A) 1996.06-… |
| पजेरो ज्युनियर | (H57A) 1995.10-1998.04 |
| टाउन बॉक्स | (U62W/U62V/U62T/U64W) 1998.11-… (पर्यायी - मागील घर्षण LSD) |
| टाउन बॉक्स रुंद | (U66W) 1999.04-2001.06 (पर्यायी - मागील घर्षण LSD) |
पजेरो III चा भाग MATC (मित्सुबिशी ऍक्टिव्ह ट्रॅक्शन कंट्रोल) पर्याय म्हणून प्राप्त झाला, एक डायनॅमिक ट्रॅक्शन कंट्रोल सिस्टम जी याप्रमाणे कार्य करते कर्षण नियंत्रण प्रणाली, आणि ऑफ-रोड असताना ते लॉकिंग फ्रंट आणि रियर क्रॉस-एक्सल भिन्नतेचे अनुकरण करते, स्लिपिंग व्हीलला ब्रेक लावते. अशा प्रकारे, 4H मोडमध्ये, ऑफ-रोड कार्यप्रदर्शन मध्यवर्ती विभेदक लॉकच्या गरजेशिवाय लक्षणीयरित्या वर्धित केले जाते. ही प्रणाली गती, शरीर टॉर्क आणि पार्श्व प्रवेग तसेच स्टीयरिंग कोन आणि अनुदैर्ध्य प्रवेग मोजणाऱ्या सेन्सर्सद्वारे ड्रायव्हिंग परिस्थितीचे विश्लेषण करते. तोटे - डिफ्लॉकच्या तुलनेत कमी प्रभावी, पॅडचा असमान पोशाख शक्य आहे, जेव्हा एबीएस आपत्कालीन मोडमध्ये जातो तेव्हा लॉकिंग अदृश्य होते.
तसेच, सुपर सिलेक्ट ट्रांसमिशनसह, तथाकथित. मल्टी-मोड ABS. पुढील आणि मागील ब्रेक तीन स्वतंत्र वाहिन्यांद्वारे नियंत्रित केले जातात, ज्यामुळे प्रत्येक चाकाला अचूक ब्रेकिंग फोर्स लागू करता येतो. तथापि, जेव्हा सेंटर डिफरेंशियल लॉक गुंतलेले असते, तेव्हा वेगवेगळे कर्षण गुणांक आणि त्या अनुषंगाने भिन्न ब्रेकिंग फोर्स ट्रान्समिशनला "ट्विस्ट" आणि वाहन कंपन करण्यास कारणीभूत ठरू शकतात. मित्सुबिशीने जगात प्रथमच मल्टी-मोड एबीएस तयार करून ही समस्या सोडवली आहे, जे लॉक सेंटर डिफरेंशियल मोडमध्ये देखील कार्य करते.
AWC सिस्टीममध्ये तीन मोड आहेत, जे मध्य कन्सोलवरील नॉबमधून कमांड वापरून इलेक्ट्रॉनिक युनिटद्वारे नियंत्रित केले जातात:
- 2WD(काही मार्केटमध्ये 4WD ECO लेबल केलेले): औपचारिकपणे फ्रंट-व्हील ड्राइव्ह, हा मोड मागील चाकांवर थोडासा टॉर्क पाठवतो ज्यामुळे मागील एक्सलमधून आवाज कमी होतो. काही अहवालांनुसार, या मोडमध्ये, लक्षात येण्याजोग्या स्लिपिंगच्या बाबतीत टॉर्क देखील मागील एक्सलमध्ये हस्तांतरित केला जाऊ शकतो.
- 4WD ऑटो: प्रवेगक पेडलच्या स्थितीवर अवलंबून, मागील चाकांना टॉर्कच्या 40% पर्यंत डोस (जेवढे दाबले जाईल तितके जास्त क्लच बंद होईल), पुढच्या आणि मागील चाकांच्या वेगातील फरक (जेव्हा बंद होतो) स्लिपिंग आणि स्लिपिंग नसताना उघडते) आणि वाहनाचा वेग. जेव्हा गॅस पेडल पूर्णपणे दाबले जाते, तेव्हा 40% पर्यंत थ्रस्ट 64 किमी/ता पेक्षा जास्त वेगाने पाठविला जातो, टॉर्क हस्तांतरण 25% पर्यंत कमी केले जाते; क्रुझिंग वेगात समान रीतीने वाहन चालवताना, 15% पर्यंत टॉर्क मागील चाकांना पुरविला जातो आणि तीक्ष्ण वळणांमध्ये कमी वेगाने, गुळगुळीत कॉर्नरिंग सुनिश्चित करून, क्लच बंद करणे कमी केले जाते.
- 4WD लॉक: घसरण्याची वाट न पाहता क्लच बंद होतो आणि कमी वेगाने ते 60% टॉर्क मागील चाकांकडे निर्देशित करते (जेव्हा प्रवेगक पेडल कोरड्या रस्त्यावर पूर्णपणे दाबले जाते), आणि उच्च वेगाने टॉर्क समान प्रमाणात वितरीत केला जातो. धुरा IN तीक्ष्ण वळणेया मोडमध्ये मागील एक्सलवरील टॉर्क देखील 4WD ऑटो प्रमाणे कमी होत नाही.
सर्व मोड्समध्ये, इलेक्ट्रॉनिक्स क्लच बंद होण्याची डिग्री बदलत राहते, परंतु संरचनात्मकदृष्ट्या ते पूर्णपणे बंद करू शकत नाही, म्हणजे. क्लचमध्ये नेहमी स्लिपेज आणि उष्णता निर्माण होते. इंटर-व्हील लॉकची भूमिका स्टॅबिलायझेशन सिस्टमला दिली जाते, जी स्लिपिंग व्हील ब्रेक करते.
| ड्रायव्हिंग मोड | कोरडा रस्ता | बर्फाच्छादित रस्ता | ||
| चाके | समोर | मागील | समोर | मागील |
| प्रवेग | 69% | 31% | 50% | 50% |
| 30 किमी/ताशी वेगाने | 15 किमी/ताशी वेगाने | |||
| 85% | 15% | 64% | 36% | |
| 80 किमी/ताशी वेगाने | ४० किमी/ताशी वेगाने | |||
| स्थिर गती | 84% | 16% | 74% | 26% |
| 80 किमी/ताशी वेगाने | 40 किमी/ताशी वेगाने | |||
क्लचच्या सतत ओव्हरहाटिंगमुळे आणि बर्याच काळासाठी लक्षात येण्याजोगा भार सहन करण्यास असमर्थतेमुळे, या प्रकारची ड्राइव्ह केवळ खूप मोठ्या स्ट्रेचसह पूर्ण मानली जाऊ शकते आणि केवळ कठोर पृष्ठभागांवर नियंत्रणक्षमता सुधारण्यासाठी योग्य आहे. Outlander XL, ASX व्यतिरिक्त, ते नवीनतम Lancer वर देखील वापरले जाते.
उघड करण्यासाठी...

घटक आणि कार्ये:
| घटक | कार्य |
| इंजिन ECU | |
| ABS/ASC-ECU | CAN द्वारे 4WD-ECU ला आवश्यक सिग्नल प्रसारित करते:
|
| ड्राइव्ह मोड स्विच 2WD/4WD/LOCK | 4WD-ECU साठी ड्राइव्ह मोड स्विच (2WD/4WD/LOCK) च्या स्थितीचे भाषांतर करते. |
| ETACS-ECU |
|
| 4WD-ECU | सिस्टम रस्त्याच्या परिस्थितीचे मूल्यांकन करते आणि, सर्व ECU आणि ड्राइव्ह मोड स्विचच्या सिग्नलवर आधारित, मागील चाकांना आवश्यक प्रमाणात टॉर्क पाठवते. ड्रायव्हिंगच्या परिस्थितीवर आधारित इष्टतम क्लच कॉम्प्रेशन फोर्सची गणना आणि सर्व ECU आणि ड्राइव्ह मोड स्विचच्या सिग्नलवर आधारित वर्तमान ड्राइव्ह मोड. |
| इन्स्ट्रुमेंट क्लस्टरमध्ये 4WD ऑपरेशन इंडिकेटर आणि लॉक इंडिकेटरचे नियंत्रण. | |
| स्व-निदान आणि दोष सहिष्णुता कार्यांचे व्यवस्थापन. | |
| डायग्नोस्टिक फंक्शन कंट्रोल (MUT-III सह सुसंगत). | |
| इलेक्ट्रॉनिक क्लच नियंत्रण | 4WD-ECU सध्याच्या परिस्थितीनुसार योग्य टॉर्क क्लचद्वारे मागील चाकांवर प्रसारित करते. |
ड्राइव्ह मोड निर्देशक
| इन्स्ट्रुमेंट क्लस्टरमधील एकात्मिक सूचक निवडलेल्या ड्राइव्ह मोड स्विच मोडला सूचित करतो (2WD मोडमध्ये प्रदर्शित होत नाही).
|
| डायग्नोस्टिक कनेक्टर | डायग्नोस्टिक कोडचे आउटपुट आणि MUT-III सह संप्रेषण. |
सिस्टम कॉन्फिगरेशन:

नियंत्रण सर्किट:

विद्युत आकृती इलेक्ट्रॉनिक नियंत्रण AWC:

यांत्रिक डिझाइन:


इलेक्ट्रॉनिक क्लच कंट्रोलमध्ये फ्रंट हाउसिंग, मेन क्लच, मेन कॅम, बॉल, पायलट कॅम, आर्मेचर, पायलट क्लच ), रियर हाउसिंग, मॅग्नेटिक कॉइल आणि शाफ्ट यांचा समावेश होतो.
- समोरचे गृहनिर्माण ड्राइव्हशाफ्टशी जोडलेले आहे आणि शाफ्टसह फिरते.
- शरीराच्या पुढील भागात, मुख्य (मुख्य क्लच) आणि नियंत्रित क्लच (पायलट क्लच) एका शाफ्टवर (शाफ्ट) बसवले जातात, तर नियंत्रित क्लच (पायलट क्लच) कॅम स्टॉप (पायलट कॅम) द्वारे स्थापित केले जातात.
[संकुचित]
सिस्टम ऑपरेशन
उघड करण्यासाठी...
क्लच बंद (2WD). पासून क्षण हस्तांतरण प्रकरणमाध्यमातून कार्डन शाफ्ट(प्रोपेलर शाफ्ट) समोरच्या घरामध्ये प्रसारित केला जातो. कारण चुंबकीय कॉइल डी-एनर्जाइज्ड आहे, पायलट क्लच आणि मुख्य क्लच गुंतलेले नाहीत आणि ड्राइव्ह फोर्स मागील डिफरेंशियल शाफ्ट आणि ड्राइव्ह पिनियनमध्ये प्रसारित होत नाही.

क्लच व्यस्त (4WD). ट्रान्सफर केसमधील टॉर्क प्रोपेलर शाफ्टद्वारे समोरच्या घरापर्यंत प्रसारित केला जातो. कारण इलेक्ट्रोमॅग्नेटिक कॉइल ऊर्जावान आहे, मागील गृहनिर्माण, पायलट क्लच आणि आर्मेचर दरम्यान चुंबकीय क्षेत्र तयार करते. चुंबकीय क्षेत्र नियंत्रित क्लच आणि फिटिंग्जवर कार्य करते आणि क्लच चालू करते. जेव्हा नियंत्रित क्लच गुंतलेला असतो, तेव्हा टॉर्क नियंत्रित कॅम यंत्रणा (पायलट कॅम) मध्ये प्रसारित केला जातो. या शक्तीला प्रतिसाद म्हणून, मुख्य कॅममधील चेंडू (पायलट कॅम) मागे घेतो आणि पुढे गती निर्माण करतो. हा आवेग मुख्य क्लचवर कार्य करतो आणि टॉर्क मागील विभेदक शाफ्ट आणि गियर ड्राइव्हद्वारे मागील चाकांवर प्रसारित केला जातो.
![]()
मागील चाकांवर प्रसारित होणारा टॉर्क क्लच वाइंडिंगला पुरवलेला विद्युत् प्रवाह बदलून समायोजित केला जातो.
[संकुचित]
[संकुचित]
S-AWC आणि ट्विन मोटर 4WD
उघड करण्यासाठी...
आउटलँडर XL (आता आउटलँडर स्पोर्ट) च्या अद्यतनासह आणि अकिनोरी नकानिशीकडून त्याची आक्रमक रचना गमावल्यामुळे, मॉडेलच्या शीर्ष आवृत्तीमधील सदोष AWC ड्राइव्हला तथाकथित Super-AWC, किंवा S-AWC ने बदलले. . मूलत:, ही एक सुधारित ACD+AYC ड्राइव्ह आहे, ज्याची वर चर्चा केली आहे, जिथे ACD केंद्र भिन्नता इलेक्ट्रोमॅग्नेटिक सक्रिय LSD डिफरेंशियल AFD ने बदलली आहे आणि इलेक्ट्रॉनिक सहाय्यकांसह पूरक आहे (AFD ऑपरेशन, सक्रिय ABS आणि ESP प्रणालींमधून धक्का बसवण्यासाठी EPS स्टीयरिंग सिस्टम. ). S-AWC हे ट्रॅक्शन वेक्टर कंट्रोलच्या तत्त्वावर तयार केले गेले आहे, जेव्हा, फ्रंट डिफरेंशियल, मागील एक्सल क्लच, ब्रेक्स आणि पॉवर स्टीयरिंगच्या स्वयंचलित नियंत्रणामुळे, सर्व चाकांवर प्रसारित होणारे टॉर्क वितरित केले जातात. मुख्य घटक म्हणजे सिस्टम कोनीय वेग निर्देशक विचारात घेते.

S-AWC सिस्टीममध्ये तीन कॉन्फिगरेशन आहेत (त्यापैकी एक - मूळ ACD + AYC - संदर्भ म्हणून मानली जाते):

S-AWC ट्रान्समिशनमध्ये वापरलेले AFD सेंटर LSD डिफरेंशियल हे इलेक्ट्रोमॅग्नेटिक क्लचवर आधारित आहे आणि AYC प्रमाणे, समोरच्या चाकांना दिलेला टॉर्क नियंत्रित करण्यास सक्षम आहे. लॉकिंग यंत्रणा जीकेएन या इंग्रजी कंपनीने तयार केली आहे - ती केंद्र जोडणी देखील पुरवते. क्लचेस कॉम्प्रेस करण्यासाठी, ऑल-व्हील ड्राइव्ह कंट्रोल युनिट इलेक्ट्रोमॅग्नेट विंडिंगवर करंट लागू करते - आणि जर समोरच्या चाकांच्या फिरण्याच्या वेगात फरक असेल तर, बॉल प्रेशर मेकॅनिझमच्या दोन डिस्क्स एकमेकांच्या सापेक्ष फिरतात आणि तयार होतात. एक अक्षीय शक्ती जी तावडीत दाबते (जसे AWC ट्रान्समिशनमध्ये असते). विभेदक लॉकिंगची डिग्री सतत इलेक्ट्रॉनिक पद्धतीने बदलली जाते, परंतु एक्सल शाफ्ट दरम्यान कठोर कनेक्शन अशक्य आहे. त्या. कठीण परिस्थितीत, मागील एक्सलवरील AYC काही फरक करणार नाही, कारण योग्य क्षण त्यावर पडणार नाही आणि सर्वसाधारणपणे मागील एक्सल जास्त गरम झाल्यामुळे कधीही बंद होऊ शकते.

S-AWC ट्रान्समिशनमध्ये चार ऑपरेटिंग मोड आहेत:
- AWC ECOफक्त पुढच्या एक्सलला टॉर्क पुरवतो ("इंधन वाचवण्यासाठी") आणि फक्त घसरताना मागील एक्सल गुंतवते;
- सामान्यरस्त्याच्या परिस्थितीनुसार सर्व चाकांवर टॉर्क चांगल्या प्रकारे वितरित करते;
- बर्फबर्फ, बर्फ आणि इतर निसरड्या पृष्ठभागांसाठी डिझाइन केलेले;
- लॉकसर्व भिन्नता बंद करते, सर्वात मोठी ऑफ-रोड क्षमता प्रदान करते.
तसेच एक स्वतंत्र केस हा पर्याय आहे ज्यामध्ये पुढील आणि मागील एक्सल एकमेकांशी अजिबात जोडलेले नाहीत आणि प्रत्येक स्वतंत्रपणे स्वतःच्या इलेक्ट्रिक मोटरद्वारे चालविला जातो:

इथेही कारस्थान आहे, कारण... एकाच मित्सुबिशीच्या विविध स्त्रोतांनुसार, AYC भिन्नता आणि पारंपारिक मुक्त भिन्नता दोन्ही धुरींवर वापरल्या जाऊ शकतात. किंवा, उदाहरणार्थ, समोरच्या एक्सलवर - उघडा आणि मागील एक्सलवर - एवायसी.
ट्विन मोटर्स 4WD मध्ये फक्त दोन मोड आहेत - सामान्य परिस्थितीसाठी “सामान्य” आणि कठीण साठी “4WD लॉक”. त्याच वेळी, चला, ऑटोरिव्ह्यू चाचण्या दर्शवितात की ट्विन मोटर 4WD ट्रान्समिशन कोणत्याही कठीण परिस्थितीवर मात करण्यास अक्षम आहे. "पूर्णपणे" या शब्दावरून:
प्रथम, आम्ही हिवाळ्यात - बर्फात चार-चाकी ड्राइव्ह वापरण्याची प्रथा आहे तेथे गेलो. आम्ही एका हायब्रीडपासून सुरुवात केली आणि... तिथेच संपलो: PHEV झटपट अडकले! ... पॉवर प्लांटचे ऑपरेटिंग अल्गोरिदम एक रहस्य आहे. तुम्ही गॅस दाबा आणि फक्त समोरचा एक्सल फिरतो. आणि पुढच्या वेळी मागची चाके फिरू लागतात, पण पुढची चाके तशीच उभी राहतात. आपण योग्य पेडल सोडता - आणि रोटेशन काही काळ चालू राहते!

या प्रकारच्या वाहनासाठी कोणता तांत्रिक उपाय सर्वात योग्य असेल आणि या कॉम्पॅक्ट क्रॉसओव्हरच्या भविष्यातील मालकांसाठी सर्वात सोयीस्कर असेल हे ठरवण्यासाठी मित्सुबिशीने ऑल-व्हील ड्राइव्ह सिस्टमच्या वापराचा अभ्यास केला आहे.
अभियंते पारंपारिक समाधानाकडे वळले - "मागणीनुसार" ऑल-व्हील ड्राइव्हसह स्वयंचलित ट्रांसमिशन वापरुन. अशा प्रणाल्या या वस्तुस्थितीवर आधारित आहेत की जेव्हा पुढची चाके घसरतात तेव्हा टॉर्कचा काही भाग मागील चाकांवर पुन्हा वितरित केला जातो. मित्सुबिशी तज्ञांना समजले की ग्राहकांना अशा प्रणालींमध्ये अधिक रस आहे जे सक्रियपणे चाक घसरण्याची शक्यता कमी करतात.
मागील आउटलँडरकडे कायमस्वरूपी ऑल-व्हील ड्राइव्ह होती केंद्र भिन्नताचिपचिपा कपलिंगद्वारे लॉक केलेले, एक्सल दरम्यान 50:50 ड्राइव्ह वितरण कठीण हवामान परिस्थितीत उत्कृष्ट कार्यप्रदर्शन प्रदान करते, परंतु दररोजच्या वापरासाठी इंधनाचा वापर जास्त होता. मित्सुबिशीने नवीन आउटलँडरला इंधनाच्या वापराच्या आकड्यांमध्ये कमीत कमी बदलांसह कठीण परिस्थितीत समान किंवा चांगली कामगिरी देण्याचा प्रयत्न केला.
अशाप्रकारे मित्सुबिशी AWC (ऑल व्हील कंट्रोल) ऑल-व्हील ड्राइव्ह ट्रान्समिशन सिस्टम दिसू लागले. ऑल व्हील कंट्रोल हे इंग्रजीतून सर्व चाकांचे नियंत्रण असे भाषांतरित करते. ही प्रणाली ड्रायव्हरला ड्राइव्हचा प्रकार निवडण्याची क्षमता देते. प्रणाली मूलत: विशेष मल्टी-सिलेक्ट 4WD ऑल-व्हील ड्राइव्ह ट्रान्समिशनचे संयोजन आहे आणि इलेक्ट्रॉनिक वितरणटॉर्क, आणि त्याव्यतिरिक्त आधुनिक ट्रॅक्शन कंट्रोल सिस्टम आणि दिशात्मक स्थिरता. AWC प्रणालीमुळे, रस्त्यासह कारच्या चाकांचे उत्कृष्ट कर्षण आणि रस्त्याच्या निसरड्या भागांवर उत्कृष्ट हाताळणी साध्य केली जाते. ट्रान्समिशनचे इष्टतम ऑपरेशन सुनिश्चित करण्यासाठी, केंद्र कन्सोलवर सादर केलेल्या तीन मोडपैकी फक्त एक निवडा: “2WD”, “4WD” किंवा “लॉक”.
| ड्रायव्हिंग मोड | वर्णन | फायदे |
| 2WD | समोरच्या चाकांवर टॉर्क निर्देशित करते | उत्तम इंधन अर्थव्यवस्था, कमी वाहनाचा आवाज, उत्तम हाताळणी. हे देखील शक्यता सोडते की कंट्रोल युनिट त्याचा आवाज कमी करण्यासाठी टॉर्कला मागील एक्सलकडे निर्देशित करते. |
| 4WD ऑटो | प्रवेगक पेडलची स्थिती आणि पुढील आणि मागील चाकांमधील वेगातील फरकानुसार मागील चाकांना टॉर्कची दिशा मोजते | दिलेल्या ड्रायव्हिंग परिस्थितीसाठी इष्टतम टॉर्क वितरण. वाहनाच्या ड्रायव्हिंग पॅरामीटर्सवर (पुढील आणि मागील चाकाचा वेग, प्रवेगक पॅडलची स्थिती आणि वाहनाचा वेग) यावर अवलंबून पुढील आणि मागील एक्सल दरम्यान टॉर्कचे वितरण स्वयंचलितपणे इलेक्ट्रॉनिक युनिटद्वारे केले जाते. 2 व्हील ड्राइव्ह मोडला प्राधान्य दिले जाते. |
| 4WD लॉक | 4WD मोडच्या तुलनेत मागील चाकांवर 1.5 पट जास्त टॉर्क पाठविला जातो | पृष्ठभागावरील पकड वाढवते, उच्च गतीने स्थिरता आणि असमान किंवा निसरड्या पृष्ठभागावर उत्तम चालना प्रदान करते. LOCK मोड 4WD मोड प्रमाणेच आहे, परंतु एक्सल दरम्यान सुधारित टॉर्क वितरण कायद्यासह. कमी वेगाने, मागील एक्सलला 1.5 पट जास्त टॉर्क पुरवठा केला जातो आणि उच्च वेगाने टॉर्क एक्सलमध्ये समान प्रमाणात वितरीत केला जातो. |
दोन ऑल-व्हील ड्राइव्ह मोड
4WD ऑटो
जेव्हा 4WD ऑटो निवडले जाते, तेव्हा आउटलँडर 4WD सिस्टम मागील चाकांना टॉर्कचा एक भाग सतत वितरित करते, जेव्हा तुम्ही गॅस पेडल दाबता तेव्हा आपोआप गुणोत्तर वाढवते. जेव्हा थ्रॉटल पेडल पूर्णपणे उदास असते तेव्हा क्लच मागील चाकांना 40% पर्यंत शक्ती पाठवते आणि 40 mph पेक्षा जास्त वेगाने हे 25% पर्यंत कमी करते. क्रुझिंग वेगाने सहजतेने वाहन चालवताना, उपलब्ध टॉर्कपैकी 15% पर्यंत मागील चाकांना पाठवले जाते. घट्ट कोपऱ्यात कमी वेगाने, गुळगुळीत कोपऱ्यासाठी प्रयत्न कमी केले जातात.
4WD लॉक
स्पेशल मध्ये ड्रायव्हिंग साठी कठीण परिस्थिती, उदाहरणार्थ बर्फामध्ये, ड्रायव्हर "4WD लॉक" मोड निवडू शकतो. लॉक गुंतलेले असताना, सिस्टीम अजूनही आपोआप टॉर्कचे पुढील आणि मागील चाकांमध्ये पुनर्वितरण करते, परंतु बहुतेक टॉर्क मागील चाकांमध्ये हस्तांतरित केले जातात. उदाहरणार्थ, टेकडीवर वेग वाढवताना, सर्व चार चाकांवर कर्षण प्रदान करण्यासाठी क्लच ताबडतोब बहुतेक टॉर्क मागील चाकांकडे पाठवेल. याउलट, ऑटोमॅटिक ऑन-डिमांड ऑल-व्हील ड्राइव्ह प्रथम मागील चाकांना टॉर्क पाठवण्याआधी पुढील चाके घसरण्याची प्रतीक्षा करेल, ज्यामुळे प्रवेगमध्ये व्यत्यय येऊ शकतो.
कोरड्या रस्त्यांवर, 4WD लॉक मोड कार्यक्षम प्रवेग प्रदान करतो. मागील चाकांवर अधिक टॉर्क पाठविला जातो, परिणामी अधिक शक्ती मिळते, बर्फाळ किंवा सैल रस्त्यावर वेग वाढवताना चांगली हाताळणी होते आणि उच्च-गती स्थिरता सुधारते. 4WD मोडच्या तुलनेत रीअर-व्हील टॉर्क शेअर 50% ने वाढतो, म्हणजे जेव्हा कोरड्या रस्त्यावर प्रवेगक पेडल पूर्णपणे दाबले जाते तेव्हा उपलब्ध टॉर्कपैकी 60% पर्यंत मागील चाकांना पाठवले जाते. 4WD लॉक मोडमध्ये, तीक्ष्ण वळणांमध्ये टॉर्क असतो मागील चाके 4WD ऑटो मोडमध्ये ड्रायव्हिंग करताना सारख्या प्रमाणात कमी होत नाही.
4WD मोडमध्ये पुढील/मागील टॉर्क गुणोत्तर खालील मूल्ये आहेत:
| ड्रायव्हिंग मोड | कोरडा रस्ता | बर्फाच्छादित रस्ता | ||
| चाके | समोर | मागील | समोर | मागील |
| प्रवेग | 69% | 31% | 50% | 50% |
| 30 किमी/ताशी वेगाने | 30 किमी/ताशी वेगाने | 15 किमी/ताशी वेगाने | 15 किमी/ताशी वेगाने | |
| 85% | 15% | 64% | 36% | |
| 80 किमी/ताशी वेगाने | 80 किमी/ताशी वेगाने | 40 किमी/ताशी वेगाने | 40 किमी/ताशी वेगाने | |
| स्थिर गती | 84% | 16% | 74% | 26% |
| 80 किमी/ताशी वेगाने | 80 किमी/ताशी वेगाने | 40 किमी/ताशी वेगाने | 40 किमी/ताशी वेगाने | |
स्ट्रक्चरल आकृती

सिस्टम घटक आणि कार्ये
|
घटकाचे नाव |
ऑपरेशन |
|
|
|
CAN द्वारे 4WD-ECU ला आवश्यक खालील सिग्नल प्रसारित करते.
|
|
|
ड्राइव्ह मोड स्विच 2WD/4WD/LOCK |
4WD-ECU साठी ड्राइव्ह मोड स्विच पोझिशन सिग्नल प्रसारित करते. |
|
|
|
प्रणाली मूल्यांकन करते रस्त्याची परिस्थितीआणि प्रत्येक ECU च्या सिग्नलवर आधारित, ड्राइव्ह मोड स्विच, टॉर्कचे आवश्यक प्रमाण मागील चाकांकडे निर्देशित करते. वाहनाच्या स्थितीवर आधारित इष्टतम विभेदक मर्यादा शक्तीची गणना करा आणि प्रत्येक ECU मधील सिग्नलवर आधारित वर्तमान ड्राइव्ह मोड, ड्राइव्ह मोड स्विच इलेक्ट्रॉनिक नियंत्रण लिंकवर वितरित वर्तमान मूल्य नियंत्रित करते. |
|
|
इन्स्ट्रुमेंट क्लस्टरमध्ये निर्देशकांचे नियंत्रण (4WD ऑपरेशन इंडिकेटर आणि लॉकिंग इंडिकेटर). |
|
|
स्वयं-निदान कार्य आणि अयशस्वी-सुरक्षित कार्य व्यवस्थापित करते. |
|
|
डायग्नोस्टिक फंक्शन कंट्रोल (MUT-III सह सुसंगत). |
|
|
इलेक्ट्रॉनिक क्लच नियंत्रण |
4WD-ECU मागील चाकांना वर्तमान मूल्याशी संबंधित टॉर्क प्रसारित करते. |
|
ड्राइव्ह मोड निर्देशक
|
इंस्ट्रुमेंट क्लस्टरमध्ये बिल्ट केलेले निवडलेले ड्राइव्ह मोड स्विच मोड सूचित करते (2WD मोडमध्ये प्रदर्शित केले जात नाही).
|
|
डायग्नोस्टिक कनेक्टर |
डायग्नोस्टिक कोड आउटपुट करते आणि MUT-III सह संप्रेषण स्थापित करते. |
सिस्टम कॉन्फिगरेशन

नियंत्रण सर्किट

इलेक्ट्रॉनिक कंट्रोल सर्किट 4डब्ल्यू.डी.

रचना


इलेक्ट्रॉनिक क्लच कंट्रोलमध्ये फ्रंट हाउसिंग, मेन क्लच, मेन कॅम, बॉल, पायलट कॅम, आर्मेचर, पायलट क्लच ), रियर हाउसिंग, मॅग्नेटिक कॉइल आणि शाफ्ट यांचा समावेश होतो.
- समोरचे गृहनिर्माण ड्राइव्हशाफ्टशी जोडलेले आहे आणि शाफ्टसह फिरते.
- हाऊसिंगच्या पुढील भागात, मुख्य क्लच आणि पायलट क्लच शाफ्टवर माउंट केले जातात (पायलट क्लच कॅमद्वारे स्थापित केला जातो).
- मागील डिफरेंशियलच्या ड्राइव्ह पिनियनसह शाफ्ट दातांद्वारे मेश केला जातो.
ऑपरेशन
क्लच बंद (2WD: चुंबकीय कॉइल डी-एनर्जाइज्ड.)

ट्रान्सफर केसमधून प्रेरक शक्ती प्रोपेलर शाफ्टद्वारे समोरच्या गृहनिर्माणमध्ये प्रसारित केली जाते. चुंबकीय कॉइल डी-एनर्जाइज्ड असल्यामुळे, पायलट क्लच आणि मुख्य क्लच गुंतलेले नाहीत आणि ड्राइव्ह फोर्स मागील डिफरेंशियलच्या शाफ्ट आणि ड्राइव्ह पिनियनमध्ये प्रसारित होत नाही.
क्लच ऑपरेट करते (4WD: चुंबकीय कॉइल्स ऊर्जावान.)

ट्रान्सफर केसमधून प्रेरक शक्ती प्रोपेलर शाफ्टद्वारे समोरच्या गृहनिर्माणमध्ये प्रसारित केली जाते. जेव्हा चुंबकीय कॉइल ऊर्जावान होते, तेव्हा मागील घरांच्या दरम्यान एक चुंबकीय क्षेत्र तयार होते, जे पायलट क्लचद्वारे नियंत्रित होते आणि आर्मेचर. चुंबकीय क्षेत्र नियंत्रित क्लच (पायलट क्लच) प्रभावित करते आणि आर्मेचर (आर्मचर) मध्ये क्लच (पायलट क्लच) समाविष्ट आहे. जेव्हा पायलट क्लच गुंतलेला असतो, तेव्हा चालक शक्ती पायलट कॅममध्ये प्रसारित केली जाते. या शक्तीला प्रतिसाद म्हणून, मुख्य कॅममधील चेंडू (पायलट कॅम) मागे घेतो आणि पुढे गती निर्माण करतो. हा आवेग मुख्य क्लचवर कार्य करतो आणि टॉर्क मागील डिफरेंशियलच्या शाफ्ट आणि गियर ड्राइव्हद्वारे मागील चाकांवर प्रसारित केला जातो.
चुंबकीय कॉइलला पुरवठा केलेला विद्युत् प्रवाह समायोजित करून, रक्कम प्रेरक शक्तीमागील चाकांवर प्रसारित 0 ते 100% च्या श्रेणीमध्ये समायोजित केले जाऊ शकते.