रोलिंग करताना, टायर केंद्रापसारक शक्तींच्या अधीन असतो. केंद्रापसारक शक्तींचे परिमाण टायरच्या रोलिंग गती, वस्तुमान आणि आकार यावर अवलंबून असते. सेंट्रीफ्यूगल चाळणीच्या प्रभावाखाली, टायरचा व्यास किंचित वाढतो. चाचण्यांनी दर्शविले आहे की जेव्हा टायर 180-220 किमी/ताशी वेगाने फिरतो तेव्हा प्रोफाइलची उंची 10-13% वाढते (रोड-सर्किट मोटरसायकल रेसिंगमधील टायर चाचण्यांचे परिणाम).
त्याच वेळी, केंद्रापसारक शक्तींच्या कृतीमुळे (टायरच्या रेडियल कडकपणात वाढ झाल्यामुळे) चाक अक्षापासून सहाय्यक पृष्ठभागापर्यंतच्या अंतरात किंचित वाढ होते (रोड प्लेन) संपर्क क्षेत्रामध्ये एकाच वेळी घट होते. रस्त्यासह टायरचा. या अंतराला डायनॅमिक टायर त्रिज्या Ro म्हणतात, जी स्थिर त्रिज्या Rc पेक्षा जास्त आहे, म्हणजेच Ro>Rc.
तथापि, ऑपरेटिंग वेगाने Ro व्यावहारिकपणे Rс च्या समान आहे.
रोलिंग त्रिज्या म्हणजे चाकाच्या रेखीय गती आणि चाकाच्या फिरण्याच्या टोकदार गतीचे गुणोत्तर:
जेथे Rк - रोलिंग त्रिज्या, m;
V - रेखीय गती, m/s;
w - कोणीय वेग, rad/s.
रोलिंग प्रतिकार
तांदूळ. कठीण पृष्ठभागावर टायर रोलिंग
जेव्हा चाक कठोर पृष्ठभागावर फिरते तेव्हा टायर फ्रेम चक्रीय विकृतीच्या अधीन असते. संपर्कात प्रवेश करताना, टायर विकृत होतो आणि वाकतो आणि संपर्क सोडताना, त्याचा मूळ आकार पुनर्संचयित करतो. टायरची विकृत ऊर्जा, जेव्हा घटक पृष्ठभागाच्या संपर्कात येतात तेव्हा निर्माण होते, मृतदेहाच्या थरांमधील अंतर्गत घर्षण आणि संपर्क क्षेत्रामध्ये घसरणे यावर खर्च होते. यातील काही ऊर्जा उष्णतेमध्ये रूपांतरित होते आणि वातावरणात हस्तांतरित होते. यांत्रिक उर्जेच्या नुकसानीमुळे, टायर घटक संपर्कातून बाहेर पडतात तेव्हा टायरचा मूळ आकार पुनर्संचयित होण्याचा दर जेव्हा घटक संपर्कात प्रवेश करतात तेव्हा टायरच्या विकृतीच्या दरापेक्षा कमी असतो. यामुळे, संपर्क क्षेत्रामध्ये सामान्य प्रतिक्रिया काही प्रमाणात पुनर्वितरण केल्या जातात (स्थिर चाकाच्या तुलनेत) आणि सामान्य शक्तींचे वितरण आकृती आकृतीमध्ये दर्शविल्याप्रमाणे फॉर्म घेते. सामान्य अभिक्रियांचा परिणाम, टायरवरील रेडियल लोडच्या परिमाणात, चाक अक्षातून जाणाऱ्या उभ्या सापेक्ष ठराविक प्रमाणात a (रेडियल प्रतिक्रियेचा “ड्रिफ्ट”) पुढे सरकतो.
चाक अक्षाशी संबंधित रेडियल प्रतिक्रियेद्वारे तयार केलेल्या क्षणाला रोलिंग रेझिस्टन्सचा क्षण म्हणतात:
चालवलेल्या चाकाच्या स्थिर गतीच्या (स्थिर रोलिंग वेगाने) स्थितीत, एक क्षण असे कार्य करतो जे रोलिंग प्रतिकाराच्या क्षणाला संतुलित करते. हा क्षण दोन शक्तींनी तयार केला आहे - ढकलणे
फोर्स P आणि रोड X ची क्षैतिज प्रतिक्रिया:
M = XRd = PRd,
जेथे P हे पुशिंग फोर्स आहे;
एक्स - रस्त्याची क्षैतिज प्रतिक्रिया;
Rd - डायनॅमिक त्रिज्या.
PRd = Qa - स्थिर गतीची स्थिती.
पुशिंग फोर्स P आणि रेडियल प्रतिक्रिया Q च्या गुणोत्तराला रोलिंग रेझिस्टन्स गुणांक k म्हणतात.
टायर व्यतिरिक्त, रोलिंग रेझिस्टन्स गुणांक रस्त्याच्या पृष्ठभागाच्या गुणवत्तेवर लक्षणीयरित्या प्रभावित होतो.
चालविलेल्या चाकाला फिरवण्यासाठी खर्च केलेली शक्ती Nk रोलिंग रेझिस्टन्स फोर्स Pc आणि रेखीय रोलिंग स्पीड V च्या गुणानुरूप आहे:
या समीकरणाचा विस्तार करून, आपण लिहू शकतो:
Nк = N1 + N2 + N3 - N4,
जेथे N1 टायरच्या विकृतीवर खर्च होणारी शक्ती आहे;
एन 2 ही संपर्क क्षेत्रामध्ये टायर घसरण्यावर खर्च केलेली शक्ती आहे;
एन 3 - व्हील बेअरिंग्जमधील घर्षण आणि हवेच्या प्रतिकारांवर खर्च केलेली शक्ती;
घटकांचा संपर्क सुटण्याच्या क्षणी टायरचा आकार पुनर्संचयित करताना N4 ही टायरने विकसित केलेली शक्ती आहे.
व्हील रोलिंगमुळे होणारी वीज हानी रोलिंगच्या वाढत्या गतीसह लक्षणीय वाढते, कारण या प्रकरणात विकृत ऊर्जा वाढते आणि परिणामी, बहुतेक ऊर्जा उष्णतेमध्ये रूपांतरित होते.
जसजसे विक्षेपण वाढते तसतसे टायरचे शव आणि ट्रेडचे विकृत रूप झपाट्याने वाढते, म्हणजेच हिस्टेरेसिसमुळे ऊर्जा कमी होते.
त्याच वेळी, उष्णता निर्मिती वाढते. हे सर्व शेवटी टायर रोलिंगवर खर्च होणारी शक्ती वाढवते.
चाचण्यांमध्ये असे दिसून आले आहे की मोटरसायकलचा टायर चालविलेल्या चाकांच्या स्थितीत (गुळगुळीत ड्रमवर) फिरवण्यासाठी 1.2 ते 3 लीटर पॉवर लागते. सह. (टायर आकार आणि रोलिंग गती अवलंबून).
अशा प्रकारे, टायर्सचे एकूण नुकसान लक्षणीय आहे आणि मोटरसायकल इंजिनच्या सामर्थ्याशी तुलना करता येते.
हे स्पष्ट आहे की मोटरसायकल टायर्स रोलिंगवर खर्च होणारी वीज कमी करण्याच्या समस्येवर लक्ष देणे अत्यंत महत्त्वाचे आहे. हे नुकसान कमी केल्याने केवळ टायर्सचा टिकाऊपणा वाढणार नाही, तर इंजिन आणि मोटरसायकलच्या घटकांच्या सेवा जीवनात लक्षणीय वाढ होईल आणि इंजिनच्या इंधन कार्यक्षमतेवर देखील सकारात्मक परिणाम होईल.
पी-टाइप टायर्सच्या निर्मितीदरम्यान केलेल्या संशोधनात असे दिसून आले आहे की या प्रकारच्या टायर्सच्या रोलिंग दरम्यान वीज हानी मानक टायर्सच्या तुलनेत लक्षणीयरीत्या कमी (30-40%) आहे.
याव्यतिरिक्त, कॉर्ड 232 केटीपासून बनवलेल्या दोन-लेयर शवामध्ये टायर्सचे रूपांतर करताना नुकसान कमी होते.
रेसिंग मोटारसायकलसाठी टायर्स रोलिंग करताना विजेचे नुकसान कमी करणे विशेषतः महत्वाचे आहे, कारण जेव्हा ते जास्त वेगाने फिरतात, तेव्हा हालचालीसाठी एकूण वीज वापराच्या संबंधात टायर्सचे नुकसान 30% पर्यंत असते. हे नुकसान कमी करण्याच्या पद्धतींपैकी एक म्हणजे रेसिंग टायर्सच्या शवामध्ये 0.40 के नायलॉन कॉर्ड वापरणे, अशा कॉर्डचा वापर करून, शवाची जाडी कमी होते, टायरचे वजन कमी होते आणि ते अधिक लवचिक होते. आणि गरम होण्यास कमी संवेदनाक्षम.
ट्रेड पॅटर्नच्या स्वरूपाचा टायरच्या रोलिंग रेझिस्टन्स गुणांकावर मोठा प्रभाव पडतो.
जेव्हा घटक रस्त्याच्या संपर्कात येतात तेव्हा निर्माण होणारी ऊर्जा कमी करण्यासाठी, रेसिंग टायर्सचे वजन शक्य तितके कमी केले जाते. रोड टायर्सची ट्रेड डेप्थ 7-9 मिमी असते, तर रेसिंग टायर्सची ट्रेड डेप्थ 5 मिमी असते.
याव्यतिरिक्त, रेसिंग टायर्सचा ट्रेड पॅटर्न अशा प्रकारे डिझाइन केला आहे की टायर रोल करताना त्याचे घटक कमीत कमी प्रतिकार देतात.
नियमानुसार, मोटरसायकलच्या पुढील (चालविलेल्या) आणि मागील (ड्राइव्ह) चाकांच्या टायर्सचा ट्रेड पॅटर्न वेगळा असतो. हे या वस्तुस्थितीद्वारे स्पष्ट केले आहे की समोरच्या चाकाच्या टायरचा उद्देश विश्वसनीय हाताळणी सुनिश्चित करणे आहे आणि मागील चाकाचा उद्देश टॉर्क प्रसारित करणे आहे.
पुढच्या टायर्सवर रिंग लग्सची उपस्थिती रोलिंग लॉस कमी करण्यात मदत करते आणि हाताळणी आणि स्थिरता सुधारते, विशेषत: कॉर्नरिंग करताना.

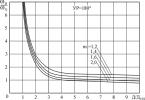
तांदूळ. पॉवर लॉस विरुद्ध रोलिंग स्पीडचे वक्र: 1 - टायर आकार 80-484 (3.25-19), मॉडेल L-130 (रस्ता); 2 - टायर आकार 85-484 (3.25-19) मॉडेल L-179 (रोड-रिंग मोटरसायकलच्या मागील चाकासाठी)
मागील चाकाचा झिगझॅग ट्रेड पॅटर्न टॉर्कचे विश्वसनीय प्रसारण सुनिश्चित करते आणि रोलिंग लॉस देखील कमी करते. वरील सर्व उपायांमुळे, टायर्स रोल करताना विजेचे नुकसान लक्षणीयरीत्या कमी करणे शक्य होते. आलेख रस्ता आणि रेसिंग टायर्ससाठी वेगवेगळ्या वेगाने पॉवर लॉस वक्र दाखवतो. आकृतीवरून पाहिल्याप्रमाणे, रेसिंग टायर्सचे रोड टायर्सच्या तुलनेत कमी नुकसान होते.

तांदूळ. जेव्हा टायर गंभीर वेगाने फिरतो तेव्हा "वेव्ह" दिसणे: 1 - टायर; 2 - चाचणी बेंच ड्रम
गंभीर टायर रोलिंग गती
जेव्हा टायरचा रोलिंग वेग एका विशिष्ट मर्यादेपर्यंत पोहोचतो, तेव्हा रोलिंग पॉवर लॉस झपाट्याने वाढतात. रोलिंग प्रतिरोधक गुणांक अंदाजे 10 पट वाढतो.
टायर ट्रेडच्या पृष्ठभागावर एक "लाट" दिसते. ही “लहर” अवकाशात गतिहीन राहून, टायरच्या चौकटीवर त्याच्या रोटेशनच्या वेगाने फिरते.
“लहर” तयार झाल्यामुळे टायरचा जलद नाश होतो. टायरमधील अंतर्गत घर्षण अधिक तीव्र झाल्यामुळे, ट्रेड-कॅस क्षेत्रामध्ये, तापमान झपाट्याने वाढते आणि ट्रेड आणि शव यांच्यातील बंधनाची ताकद कमी होते.
केंद्रापसारक शक्तींच्या प्रभावाखाली, जे उच्च रोलिंग वेगाने परिमाणात लक्षणीय असतात, ट्रीड किंवा पॅटर्न घटकांचे विभाग फाटले जातात.
रोलिंग स्पीड ज्यावर "वेव्ह" दिसतो तो टायरचा क्रिटिकल रोलिंग स्पीड मानला जातो.
नियमानुसार, गंभीर वेगाने रोलिंग करताना, 5-15 किमी धावल्यानंतर टायर नष्ट होतो.
टायरचा दाब वाढल्याने गंभीर गती वाढते.
तथापि, सराव दर्शवितो की SSC दरम्यान, काही भागात मोटारसायकलचा वेग स्टँडवर निर्धारित केलेल्या गंभीर टायरच्या वेगापेक्षा 20-25% जास्त असतो (जेव्हा टायर ड्रमवर फिरतो). या प्रकरणात, टायर नष्ट होत नाहीत. हे या वस्तुस्थितीद्वारे स्पष्ट केले आहे की विमानात रोलिंग करताना, ड्रमवर रोल करताना टायरची विकृती कमी (समान परिस्थितीत) असते आणि म्हणूनच गंभीर गती जास्त असते. याव्यतिरिक्त, टायर्सच्या गंभीर वेगापेक्षा जास्त वेगाने मोटरसायकल चालवण्यास लागणारा वेळ नगण्य आहे. त्याच वेळी, येणाऱ्या हवेच्या प्रवाहामुळे टायर चांगले थंड होते. या संदर्भात, जीसीएससाठी हेतू असलेल्या स्पोर्ट्स मोटरसायकल टायर्सची तांत्रिक वैशिष्ट्ये विशिष्ट मर्यादेत अल्पकालीन ओव्हरस्पीडिंगला परवानगी देतात.
ड्रायव्हिंग आणि ब्रेकिंग स्थितीत टायर रोलिंग. ड्रायव्हिंग व्हीलच्या परिस्थितीत टायर रोलिंग होते जेव्हा टॉर्क Mkr चाकावर लावला जातो.
ड्राईव्ह व्हीलवर कार्य करणाऱ्या शक्तींचा आकृती आकृतीमध्ये दर्शविला आहे.

तांदूळ. रोलिंग करताना ड्राईव्ह व्हील टायरवर कार्य करणाऱ्या शक्तींचा आकृती
उभ्या बल Q ने लोड केलेल्या चाकावर टॉर्क Mkr लावला जातो.
रोड रिॲक्शन Qp, लोड Q च्या परिमाणात, चाकाच्या अक्षाच्या सापेक्ष एका विशिष्ट अंतराने विस्थापित होते. फोर्स Qp रोलिंग रेझिस्टन्सचा एक क्षण तयार करते Ms:
टॉर्क Mkr ट्रॅक्शन चाळणी RT तयार करतो:
Рт = Мкр/Rк
जेथे Rк रोलिंग त्रिज्या आहे.
जेव्हा ड्रायव्हिंग व्हीलच्या परिस्थितीत टायर फिरतो तेव्हा टॉर्कच्या प्रभावाखाली, संपर्कात असलेल्या स्पर्शिक शक्तींचे पुनर्वितरण होते.
हालचालीच्या दिशेने संपर्काच्या पुढील भागात, स्पर्शिक शक्ती वाढते, मागील भागात ते कमी होतात. या प्रकरणात, स्पर्शिक बल X चे परिणाम कर्षण बल Рт च्या समान आहे.
ड्राईव्ह व्हीलच्या रोलिंगवर खर्च होणारी शक्ती टॉर्क Mkr आणि चाकाच्या रोटेशनच्या कोनीय गती Wk च्या गुणानुरूप आहे:
हे समीकरण तेव्हाच वैध आहे जेव्हा संपर्कात कोणतीही स्लिप नसते.
तथापि, स्पर्शिक शक्तींमुळे ट्रेड पॅटर्न घटक रस्त्याच्या तुलनेत घसरतात.
यामुळे, चाक Ud च्या अनुवादात्मक हालचालीच्या गतीचे वास्तविक मूल्य सैद्धांतिक Vt पेक्षा थोडे कमी आहे.
वास्तविक फॉरवर्ड स्पीड Vd आणि सैद्धांतिक Vt च्या गुणोत्तराला चाक कार्यक्षमता म्हणतात, जे रस्त्याच्या सापेक्ष टायर घसरल्यामुळे वेग कमी करते.
खालील सूत्र वापरून स्लिपेज a चे प्रमाण मोजले जाऊ शकते:
अर्थात, वास्तविक वेग Vd चे मूल्य Vt ते 0 पर्यंत बदलू शकते, म्हणजे:
घसरण्याची तीव्रता स्पर्शिक शक्तींच्या विशालतेवर अवलंबून असते, जे यामधून टॉर्कच्या विशालतेद्वारे निर्धारित केले जाते.
पूर्वी दर्शविले:
Mkr = XRk;
X = Рт = Qv,
जेथे v हा टायरच्या रस्त्याला चिकटवण्याचा गुणांक आहे.
जेव्हा टॉर्क गंभीर मूल्यापेक्षा एका विशिष्ट मूल्यापर्यंत वाढतो, तेव्हा परिणामी स्पर्शिक बल X चे परिमाण परवानगीपेक्षा जास्त होते आणि टायर रस्त्याच्या सापेक्ष पूर्णपणे घसरतो.
ऑपरेटिंग लोड रेंजमधील विद्यमान मोटरसायकल टायर्स पूर्ण घसरल्याशिवाय 55-75 kgf*m टॉर्क प्रसारित करू शकतात (टायरचा आकार, भार, दाब इ. यावर अवलंबून).
जेव्हा मोटारसायकल ब्रेक लावते तेव्हा टायरवर काम करणारी शक्ती ही ड्रायव्हिंग व्हीलच्या परिस्थितीत टायर चालवताना उद्भवणाऱ्या शक्तींसारखीच असते.
जेव्हा चाकावर ब्रेकिंग टॉर्क माउंट केला जातो तेव्हा संपर्क क्षेत्रामध्ये स्पर्शिक शक्तींचे पुनर्वितरण होते. संपर्काच्या मागील बाजूस सर्वात मोठी स्पर्शिक शक्ती उद्भवते. स्पर्शिक शक्तींचा परिणाम ब्रेकिंग फोर्स T सह परिमाण आणि दिशेने एकरूप होतो:
जेव्हा ब्रेकिंग टॉर्क Mt ठराविक गंभीर मूल्यापेक्षा जास्त वाढतो, तेव्हा ब्रेकिंग फोर्स T टायरच्या रस्त्यावरील आसंजन बल (T>Qv) पेक्षा जास्त होतो आणि संपर्कात पूर्ण घसरणे सुरू होते, स्किडिंगची घटना घडते.
कॉन्टॅक्ट झोनमध्ये स्किडिंग करताना, ट्रेडचे तापमान वाढते, आसंजन गुणांक कमी होतो आणि ट्रेड पॅटर्नचा पोशाख झपाट्याने वाढतो. ब्रेकिंगची कार्यक्षमता कमी होते (ब्रेकिंग अंतर वाढते).
सर्वात प्रभावी ब्रेकिंग तेव्हा होते जेव्हा ब्रेकिंग फोर्स T हे टायरच्या आसंजन शक्तीच्या परिमाणात रस्त्यावर असते.
परिणामी, जेव्हा ड्रायव्हर मोटरसायकलच्या डायनॅमिक गुणांचा टायर कमी करण्यासाठी वापरतो, तेव्हा ड्राईव्ह व्हीलला टॉर्क पुरवठा करणे आवश्यक आहे जे रस्त्याच्या सापेक्ष टायरची कमीत कमी घसरणे सुनिश्चित करते.
टायर्स निवडण्यासाठी आणि त्यांच्या आकाराच्या आधारावर व्हील रोलिंग त्रिज्या निर्धारित करण्यासाठी, अक्षांवर लोडचे वितरण जाणून घेणे आवश्यक आहे.
पॅसेंजर कारसाठी, एकूण वजनाच्या एकूण वजनावरून भार वितरण प्रामुख्याने मांडणीवर अवलंबून असते. क्लासिक लेआउटसह, मागील एक्सल एकूण वजनाच्या 52...55% लोड करते, फ्रंट-व्हील ड्राइव्ह वाहनांसाठी 48%.
व्हील rк ची रोलिंग त्रिज्या एका चाकावरील लोडवर अवलंबून निवडली जाते. चाकावरील सर्वात मोठा भार कारच्या वस्तुमानाच्या केंद्राच्या स्थितीद्वारे निर्धारित केला जातो, जो कारच्या प्राथमिक स्केच किंवा प्रोटोटाइपनुसार स्थापित केला जातो.
G2=Ga*48%=14000*48%=6720N
G1=Ga*52%=14000*52%=7280N
परिणामी, कारच्या पुढील आणि मागील एक्सलच्या प्रत्येक चाकावरील भार अनुक्रमे सूत्रांद्वारे निर्धारित केला जाऊ शकतो:
P1=7280/2=3360 N
P2=6720/2=3640 N
आम्ही सूत्र वापरून समोरच्या धुरापासून वस्तुमानाच्या केंद्रापर्यंतचे अंतर शोधतो:
कारचा एल-बेस, मिमी.
a= (6720*2.46) /14000=1.18m.
वस्तुमानाच्या केंद्रापासून मागील धुरापर्यंतचे अंतर:
h=2.46-1.18=1.27m
टायर प्रकार (GOST टेबलनुसार) - 165-13/6.45-13. या परिमाणांचा वापर करून, आपण मुक्त स्थितीत चाकाची त्रिज्या निर्धारित करू शकता:
जेथे b ही टायर विभागाची रुंदी आहे (165 मिमी)
d - टायर रिम व्यास (१३ इंच)
1 इंच = 25.4 मिमी
rc=13*25.4/2+165=330 मिमी
भार-आधारित विकृती लक्षात घेऊन व्हील आरकेची रोलिंग त्रिज्या निर्धारित केली जाते:
rk=0.5*d+ (1-k) *b (9)
जेथे k हा रेडियल विरूपण गुणांक आहे. मानक आणि रुंद-प्रोफाइल टायर्ससाठी k 0.3 मानले जाते
rk=0.5*330+ (1-0.3) *165=280mm=0.28m
इतर प्रकाशने:
तांत्रिक आणि कर्णधार उपकरणांच्या तरतुदीसाठी गॅस टर्बाइन इंजिनसह जहाजांच्या गरजांचे औचित्य
नियामक आणि तांत्रिक दस्तऐवजांच्या अनुषंगाने, ग्राहकाला VT च्या नमुन्याचे कोणतेही वितरण सुटे भाग, साधने आणि उपकरणे (SPTA) च्या संचासह केले जाते. व्हीटी नमुन्यासाठी स्पेअर पार्ट्सचे व्हॉल्यूम आणि श्रेणी उत्पादन विकसकाद्वारे, नियमानुसार, त्याच्या टिकाऊपणाच्या नियुक्त केलेल्या निर्देशकांच्या आधारावर निर्धारित केले जाते...
सुटे भाग आणि साहित्य आवश्यक प्रमाणात गणना
प्रति 1000 किमी धावण्याच्या स्पेअर पार्ट्सचा वापर दर जेथे प्रति 1000 किमी धावण्याच्या युनिट्सची विशिष्ट संख्या आहे. तक्ता 5 प्रति 1000 किमी धावण्याच्या एककांची मानक संख्या, मॉडेल, कार ब्रँड प्रति 1000 किमी धावण्याच्या परिचलन युनिटची मानक संख्या, एकके. ICE गियरबॉक्स PM ZM गियरबॉक्स KamAZ-55102 0 ...
ANSYS मध्ये ऑप्टिमायझेशन साधने
दोन ऑप्टिमायझेशन पद्धतींव्यतिरिक्त, पाच भिन्न ऑप्टिमायझेशन साधने ANSYS मध्ये उपलब्ध आहेत. ऑप्टिमायझेशन साधने डिझाइन पॅरामीटर्समधील फरकांच्या श्रेणीचे मूल्यांकन आणि समजून घेण्यासाठी वापरली जातात. ते वस्तुनिष्ठ कार्याचे ऑप्टिमायझेशन प्रदान करत नाहीत, परंतु पॅरामीटर्सच्या अनेक संचांचे स्वयंचलित प्राप्त करणे प्रदान करतात ...
कारच्या चाकांची (चित्र 3.4) खालील त्रिज्या असतात: स्थिर आर एस,गतिमान आर डीआणि रोलिंग त्रिज्या r गुणवत्ता.
स्थिर त्रिज्यास्थिर चाकाच्या अक्षापासून रस्त्याच्या पृष्ठभागापर्यंतचे अंतर आहे. हे चाकावरील भार आणि टायरमधील हवेच्या दाबावर अवलंबून असते. भार वाढल्याने स्थिर त्रिज्या कमी होते आणि टायरमधील हवेचा दाब कमी होतो आणि त्याउलट.
डायनॅमिक त्रिज्यारोलिंग व्हीलच्या अक्षापासून रस्त्याच्या पृष्ठभागापर्यंतचे अंतर आहे. हे भार, टायरमधील हवेचा दाब, चाकातून प्रसारित होणारा वेग आणि टॉर्क यावर अवलंबून असते. डायनॅमिक त्रिज्या वाढत्या गतीने वाढते आणि प्रसारित टॉर्क कमी होते आणि त्याउलट.
रोलिंग त्रिज्याचाकाच्या अक्षाच्या रेषीय गती आणि त्याच्या कोनीय गतीचे गुणोत्तर म्हणतात:
रोलिंग त्रिज्या, लोड, टायरमधील हवेचा दाब, प्रसारित टॉर्क, चाक घसरणे आणि घसरणे यावर अवलंबून प्रायोगिकरित्या निर्धारित केले जाते किंवा सूत्र वापरून गणना केली जाते.
(3.13.)
कुठे n ते -पूर्ण चाक क्रांतीची संख्या; S K - चक्राच्या पूर्ण संख्येसाठी चाकाने प्रवास केलेले अंतर.
अभिव्यक्ती (3.13) वरून असे दिसून येते की जेव्हा चाक पूर्णपणे घसरते (S k = 0), रोलिंग त्रिज्या r गुणवत्ता= 0, आणि पूर्ण स्लाइडिंगसह (n k = 0) g गुणवत्ता → oz.
अभ्यासाने दाखविल्याप्रमाणे, कठोर पृष्ठभाग आणि चांगली पकड असलेल्या रस्त्यांवर, रोलिंग त्रिज्या, स्थिर आणि गतिमान त्रिज्या एकमेकांपासून किंचित भिन्न असतात. त्यामुळे ते शक्य आहे
भविष्यात गणना करताना, आम्ही हे अंदाजे मूल्य वापरू. आपण संबंधित मूल्याला चाकाची त्रिज्या म्हणू आणि ती r k दर्शवू.
 विविध प्रकारच्या टायर्ससाठी, चाक त्रिज्या GOST नुसार निर्धारित केली जाऊ शकते, जी अनेक लोड मूल्यांसाठी स्थिर त्रिज्या नियंत्रित करते.
विविध प्रकारच्या टायर्ससाठी, चाक त्रिज्या GOST नुसार निर्धारित केली जाऊ शकते, जी अनेक लोड मूल्यांसाठी स्थिर त्रिज्या नियंत्रित करते.
ki आणि टायरमधील हवेचा दाब. या व्यतिरिक्त, व्हील त्रिज्या, m, अभिव्यक्तीचा वापर करून टायरच्या नाममात्र परिमाणांवरून गणना केली जाऊ शकते.
![]() (3.14)
(3.14)
तांदूळ. ३.४. चाकाची त्रिज्या
या नियमानुसार, कार टायर्सच्या मार्किंगमध्ये अतिरिक्त वेग आणि लोड-असर क्षमता निर्देशांक सादर केले जातात. कारच्या टायर्सचा वेग आणि लोड-असर क्षमतेचे काही निर्देशांक खालील तक्त्यामध्ये सादर केले आहेत.
कारच्या टायर्सचा वेग आणि भार सहन करण्याच्या क्षमतेचे काही निर्देशांक:
k हे कारचे प्रति चाकाचे एकूण वजन आहे.UNECE नियमन 30 नुसार टायर पदनामांची उदाहरणे:
175/80R16Q88 – निवासाठी टायर;
175/80R16СN106 - गझेलसाठी टायर.
मुक्त चाक त्रिज्या
मुक्त त्रिज्याआर 0 ही मुक्त (अनलोडेड) अवस्थेतील चाकाची त्रिज्या आहे. उदाहरणार्थ, लो-प्रोफाइल टायर प्रकारासाठी 205/70-14 78 एस(टायर पदनाम UNECE नियमन 30 नुसार दिलेले आहे) ही त्रिज्या खालीलप्रमाणे आढळेल:
आर 0 = 0,5d+एन= 0,5d+IN(N/A)10 -2 ; (100×N/V) - टायर मालिका; 1 इंच 25.4 च्या बरोबरीचे आहे मिमी, ते आहे:
आर 0 = (0.5×14×25.4 + 205×0.7)×10 –3 = (177.8 + 143.5)×10 –3 = 0.321 मी.
स्थिर चाक त्रिज्या
कारच्या ऑपरेशनल गुणधर्मांची गणना करताना निर्धारित घटकांपैकी एक म्हणजे चाकच्या मध्यभागी ते सामान्य भार (स्थिर कारचे वजन) लोड केलेल्या स्थिर चाकाच्या समर्थन पृष्ठभागापर्यंतचे मूल्य. काटेकोरपणे सांगायचे तर, टायर लवचिक आहे आणि लोड लागू केल्यावर ते विकृत होते, हे मूल्य चाकाच्या केंद्रापासून जीवापर्यंतचे अंतर दर्शवते, तथापि, कारच्या सिद्धांतामध्ये, या मूल्यास सामान्यतः स्थिर त्रिज्या म्हणतात ( आर st). तांत्रिक डेटामध्ये, स्थिर त्रिज्या मूल्य बहुतेकदा दिले जात नाही आणि त्याऐवजी टायर चिन्हांकित केले जाते. अर्थात, जर आपण रिमचा व्यास नियुक्त केला तर - d, टायर प्रोफाइल रुंदी - बी, टायर प्रोफाइलची उंची आणि रुंदी (टायर मालिका) याचे टक्केवारी प्रमाण - पी, टायरचा बाह्य व्यास - डी, नंतर स्थिर त्रिज्या अशी परिभाषित केली आहे:
टॉरॉइड टायर्ससाठी:
;

लो प्रोफाइल टायर्ससाठी:
 ;
;
रुंद प्रोफाइल टायर्ससाठी
 .
.
येथे:  - टायरच्या रेडियल विकृतीचे गुणांक. 0.15 - 0.25 च्या श्रेणीतील अंतर्गत दाब असलेल्या प्रवासी कारच्या टायर्ससाठी एमपीएप्रथम अंदाजे म्हणून आपण घेऊ शकतो
- टायरच्या रेडियल विकृतीचे गुणांक. 0.15 - 0.25 च्या श्रेणीतील अंतर्गत दाब असलेल्या प्रवासी कारच्या टायर्ससाठी एमपीएप्रथम अंदाजे म्हणून आपण घेऊ शकतो  = 0.15, 0.5 च्या अंतर्गत दाब असलेल्या ट्रक टायरसाठी एमपीए
= 0.15, 0.5 च्या अंतर्गत दाब असलेल्या ट्रक टायरसाठी एमपीए
 = 0,1.
= 0,1.
वायवीय टायरचे गुणधर्म
वायवीय टायर त्यांच्या शॉक-शोषक गुणधर्मांमुळे मोठ्या प्रमाणावर वापरले जातात. ते रस्त्याच्या असमानतेमुळे झटके लक्षणीयरीत्या मऊ करतात.
टायरचे भौतिक आणि यांत्रिक गुणधर्म भार क्षमता, कार्यक्षमता, हाताळणी, क्रॉस-कंट्री क्षमता इ. असे वाहन कार्यप्रदर्शन निर्देशक निर्धारित करतात. शेवटी, हे सर्व निर्देशक बाह्य घटकांच्या प्रभावाखाली टायरच्या मूल्य आणि विकृतीच्या प्रकारानुसार निर्धारित केले जातात. सैन्याने
वायवीय टायरच्या विकृतीचे चार प्रकार आहेत: रेडियल (सामान्य), परिघीय (स्पर्शीय), आडवा (पार्श्व) आणि कोणीय.
रेडियल टायर विकृत रूपत्याच्या सामान्य विक्षेपाने मोजले जाते h n, विनामूल्य फरकाच्या समान (आर 0 ) आणि स्थिर ( आर st) चाक त्रिज्या:
h n =आर 0 –आरकला.
स्थिर अनुलंब भार (स्थिर वाहनाचे वजन) च्या प्रभावाखाली, टायरच्या लवचिक संरचनेच्या विकृतीच्या परिणामी, चाक अक्षापासून समर्थन पृष्ठभागापर्यंतचे अंतर कमी होते.
सामान्य विक्षेपण- टायरच्या सर्वात महत्वाच्या वैशिष्ट्यांपैकी एक, त्याची लोड क्षमता आणि गुळगुळीत राइड निश्चित करणे. जसजसे विक्षेपण वाढते तसतसे टायरच्या संरचनात्मक घटकांमधील ताण वाढतो आणि थकवा वाढतो आणि सेवा आयुष्य कमी होते. सामान्य लोडचे सर्वोच्च अनुज्ञेय मूल्य, ज्यावर रेडियल विकृती असूनही, त्यात दिलेल्या हवेच्या दाबाने टायरचे निर्दिष्ट सेवा आयुष्य सुनिश्चित केले जाते, याला सामान्यतः टायरची लोड-वाहन क्षमता म्हणतात. सामान्य लोड मूल्य GOST किंवा UNECE नियम 30 (विदेशी-निर्मित वाहनांसाठी) द्वारे नियंत्रित केले जाते.
कारसाठी ड्रायव्हिंग व्हीलचे प्रकार आणि पॅरामीटर्स त्यांच्यावरील सामान्य भारानुसार निवडले जातात (टेबल 1). मानक टायरमधील हवेच्या दाबावर अवलंबून अनेक परवानगीयोग्य भार प्रदान करते. तुम्ही ज्या मशीनची गणना करत आहात त्यासाठी टायर निवडताना, तुम्हाला खालील नियमांचे मार्गदर्शन करणे आवश्यक आहे. गणनेद्वारे प्राप्त झालेल्या टायरवरील सामान्य भार मानकानुसार प्रदान केलेल्या मूल्यांपैकी सर्वात कमी हवेच्या दाबाने मानकानुसार परवानगी असलेल्या कमाल भारापेक्षा जास्त नसावा.
ड्राइव्ह व्हीलवरील भार निश्चित करताना, मशीनच्या ऑपरेशन दरम्यान, त्याचा तांत्रिक हेतू लक्षात घेऊन जास्तीत जास्त संभाव्य लोड प्रदान करणे आवश्यक आहे.
एक्सलसह वाहनाच्या वजनाच्या एकसमान स्थिर वितरणासह, ऑपरेशन दरम्यान त्याच्या संभाव्य पुनर्वितरणाच्या आधारावर एका चाकावरील जास्तीत जास्त भार निश्चित केला पाहिजे. या प्रकरणात, वाहनाच्या गुरुत्वाकर्षण आणि वाहतूक केल्या जाणाऱ्या मालवाहू तसेच ट्रेलर हिचवरील ट्रॅक्शन फोर्सच्या उभ्या घटकापासून ड्राइव्ह व्हीलवरील भार विचारात घेतला जातो.
निवडलेल्या टायरचे पॅरामीटर्स प्रोटोटाइप वाहनाच्या ड्राइव्ह व्हीलच्या प्रकार आणि पॅरामीटर्सच्या विरूद्ध तपासले जातात. निवडलेल्या व्हील आणि प्रोटोटाइप व्हीलच्या पॅरामीटर्सची तुलना करताना, हे लक्षात घेतले पाहिजे की ट्रक उत्पादक कधीकधी वाढीव टायरचा आकार वापरतात (वाहनाच्या आवश्यकतांना परवानगी असल्यास). "ओव्हरसाईज्ड" टायर अधिक टिकाऊ असतात, मातीवर कमी दाब देतात आणि वाहनाला उच्च कर्षण गुणधर्म देतात. अशा टायर्सचा वापर कच्च्या रस्त्यावर किंवा खराब पृष्ठभाग असलेल्या रस्त्यांवर चालणाऱ्या ट्रकसाठी सर्वात जास्त सल्ला दिला जातो.
तक्ता 1.
कार टायर्सचे पॅरामीटर्स (GOST 7463-89)
|
ऑटोमोबाईल |
चाक सूत्र |
टायर पदनाम |
टायरमधील हवेचा दाब, एमपीए: समोर/मागील |
|
टायरचे सामान्य विक्षेपण h nत्याच्या विकृतीमुळे केवळ रेडियलमध्येच नाही तर परिघीय आणि आडवा दिशानिर्देशांमध्ये देखील. या प्रकरणात, एकूण टायर कॉम्प्रेशन लोडपैकी 40% त्याच्या सामग्रीच्या विकृतीवर आणि 60% एअर कॉम्प्रेशनवर खर्च केला जातो.
भेद करा कमी, मध्यम आणि उच्च दाबाचे टायर. कमी दाबाच्या टायरमध्ये हवेचे प्रमाण वाढते आणि कॉर्डचे थर कमी असतात. ते रस्त्याच्या असमानतेचे धक्के अधिक हळूवारपणे शोषून घेतात आणि त्यांच्यात चांगले शॉक-शोषक गुणधर्म आहेत, परंतु कमी भार क्षमता. कमी आणि मध्यम दाबाच्या टायर्ससाठी, टायरची अनुज्ञेय सामान्य विकृती त्याच्या उंचीच्या 15...20% आहे आणि उच्च दाब टायर्ससाठी - 10...12% आहे.