हे मॅन्युअल सिग्नल योग्यरित्या ओळखले गेले आहे हे सत्यापित करण्यासाठी वापरले जाते. उच्चस्तरीय CAN आणि निम्न पातळी CAN ते बस कनेक्शन.
केबल वापरली
मल्टीफंक्शन केबलसूचना तपासत आहे
- व्होल्टेज तपासणी (ऑसिलोस्कोप): व्होल्टेज तपासण्यासाठी, बॅटरी कनेक्ट केलेली असणे आवश्यक आहे आणि इग्निशन चालू केले पाहिजे.
- रेझिस्टन्स मापन: रेझिस्टन्स मापन करताना, मोजली जाणारी वस्तू मापन करण्यापूर्वी डी-एनर्जाइज्ड असणे आवश्यक आहे. हे करण्यासाठी, डिस्कनेक्ट करा संचयक बॅटरी. सिस्टममधील सर्व कॅपेसिटर डिस्चार्ज होईपर्यंत 3 मिनिटे प्रतीक्षा करा.
CAN बसची माहिती
CAN बस (कंट्रोलर एरिया नेटवर्क) ही सीरियल कम्युनिकेशन बस प्रणाली आहे आणि त्यात खालील वैशिष्ट्ये आहेत:
- सिग्नल प्रसार दोन्ही दिशांमध्ये होतो.
- प्रत्येक संदेश सर्व बस सदस्यांना प्राप्त होतो. प्रत्येक बस ग्राहक हा संदेश वापरणार की नाही हे स्वतः ठरवतो,
- साध्या समांतर कनेक्शनद्वारे अतिरिक्त बस सदस्य जोडले जातात.
- बस प्रणाली मास्टरसह एक प्रणाली तयार करते. ट्रान्समीटर किंवा रिसीव्हर म्हणून कनेक्ट केलेले आहे की नाही यावर अवलंबून प्रत्येक बस ग्राहक मास्टर किंवा गुलाम असू शकतो.
- ट्रान्समिशन माध्यम म्हणून दोन-वायर कनेक्शन वापरले जाते. वायर पदनाम: CAN निम्न पातळी आणि CAN उच्च पातळी.
- सामान्यतः, प्रत्येक बस सदस्य इतर सर्व बस सदस्यांशी बसद्वारे संवाद साधू शकतो. बसवरील डेटा एक्सचेंज प्रवेश नियमांनुसार नियंत्रित केले जाते. के-कॅन डेटा बस (बॉडी कॅन बस), पीटी-कॅन बस (बॉडी कॅन बस) मधील मुख्य फरक इंजिन कॅनआणि ट्रान्समिशन) आणि F-CAN बस (चेसिस कॅन बस) आहे:
- K-CAN: डेटा ट्रान्सफर रेट अंदाजे. 100 Kbps सिंगल-वायर मोड शक्य आहे.
- PT-CAN: डेटा ट्रान्सफर रेट अंदाजे. 500 Kbps. सिंगल-वायर मोड शक्य नाही.
- F-CAN: डेटा ट्रान्सफर रेट अंदाजे. 500 Kbps. सिंगल-वायर मोड शक्य नाही.
मास्टर डिव्हाइस:मास्टर डिव्हाइस सक्रिय संप्रेषण भागीदार आहे ज्यातून संप्रेषण पुढाकार येतो. मास्टरला प्राधान्य आहे आणि संप्रेषण नियंत्रित करते. ते बस प्रणालीद्वारे निष्क्रिय बस ग्राहकांना (ॲक्ट्युएटर) संदेश पाठवू शकते आणि विनंती केल्यावर, त्याचे संदेश प्राप्त करू शकते.
ॲक्ट्युएटर:ॲक्ट्युएटर हा संप्रेषणात एक निष्क्रिय सहभागी आहे. ते डेटा प्राप्त आणि प्रसारित करण्यासाठी कमांड प्राप्त करते.
मास्टर डिव्हाइससह सिस्टम:मास्टर डिव्हाईस असलेल्या सिस्टीममध्ये, संप्रेषण सहभागी एखाद्या विशिष्ट टप्प्यावर मास्टर किंवा एक्झिक्युटिव्ह डिव्हाइसची भूमिका स्वीकारू शकतात.
ऑसिलोग्राफी K-CAN, PT-CAN, F-CAN
CAN बस निर्दोषपणे काम करत आहे की नाही हे अधिक स्पष्ट होण्यासाठी, बसमधील संवादाचे निरीक्षण करणे आवश्यक आहे. या प्रकरणात, वैयक्तिक बिट्सचे विश्लेषण करण्याची आवश्यकता नाही, परंतु फक्त CAN बस कार्यरत आहे याची खात्री करणे आवश्यक आहे. ऑसिलोग्राफी दाखवते: "CAN बस कोणत्याही अडचणीशिवाय काम करत आहे."
के-कॅन:
जमिनीच्या सापेक्ष कमी कॅन पातळी: U मि = 1 V आणि U कमाल = 5 V
जमिनीच्या सापेक्ष उच्च कॅन पातळी: U मि = 0 V आणि U कमाल = 4 V
के-कॅन बसवरील मोजमापांसाठी ऑसिलोस्कोप सेटिंग्ज:
तांदूळ. १: K-CAN मोजमाप: CH1 CAN कमी पातळी, CH2 CAN उच्च पातळी
CAN लो (किंवा CAN-उच्च) वायर आणि ग्राउंडमधील व्होल्टेज ऑसिलोस्कोपने मोजताना, व्होल्टेज रेंजमध्ये स्क्वेअर वेव्ह सिग्नल प्राप्त होतो:
PT-CAN आणि F-CAN
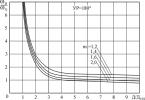
जमिनीच्या सापेक्ष कमी कॅन पातळी: U मि = 1.5 V आणि U कमाल = 2.5 V
जमिनीच्या सापेक्ष उच्च कॅन पातळी: U मि = 2.5 V आणि U कमाल = 3.5 V
ही मूल्ये अंदाजे आहेत आणि 100 mV पर्यंत, बस लोडवर अवलंबून बदलू शकतात.
PT-CAN (किंवा F-CAN) बसवरील मोजमापांसाठी ऑसिलोस्कोप सेटिंग्ज:
आकृती 2: PT-CAN मापन: CH1 CAN कमी, CH2 CAN उच्च
K-CAN, PT-CAN आणि F-CAN बरोबर जुळणारे प्रतिकार मोजण्यासाठी प्रक्रिया
प्रतिकार मापन सत्यापन प्रक्रिया:- CAN बस डी-एनर्जाइज्ड असणे आवश्यक आहे
- इतर कोणतेही मोजमाप यंत्र जोडलेले नसावे (समांतर कनेक्शन मोजमाप साधने)
- मोजमाप CAN कमी आणि CAN उच्च वायर दरम्यान केले जाते
- वास्तविक मूल्ये निर्दिष्ट मूल्यांपेक्षा अनेक ohms द्वारे भिन्न असू शकतात.
के-कॅन
के-कॅन बसवर वेगळे प्रतिकार मापन करणे शक्य नाही, कारण ईसीयू स्विचिंग लॉजिकवर अवलंबून प्रतिकार बदलतो!
PT-CAN, F-CAN
सिग्नल प्रतिबिंब टाळण्यासाठी, दोन सदस्य कॅन बस(PT-CAN नेटवर्कमधील कमाल अंतरासह) 120 Ohms च्या प्रतिकाराने लोड केले जातात. दोन्ही लोड प्रतिकारसमांतर जोडलेले आहेत आणि 60 Ohms च्या समतुल्य प्रतिकार तयार करतात. पुरवठा व्होल्टेज बंद केल्याने, हा समतुल्य प्रतिकार डेटा लाइन्स दरम्यान मोजला जाऊ शकतो. याव्यतिरिक्त, वैयक्तिक प्रतिकार स्वतंत्रपणे मोजले जाऊ शकतात.
60 ohms च्या प्रतिकारासह मोजण्यासाठी सूचना: बसमधून सहज उपलब्ध होणारा संगणक डिस्कनेक्ट करा. कमी आणि उच्च CAN तारांमधील कनेक्टरवरील प्रतिकार मोजा.
लक्षात ठेवा!
सर्व वाहनांना CAN बसवर टर्मिनेटिंग रेझिस्टर नसतात, जोडलेल्या वाहनावरील बिल्ट-इन टर्मिनेटिंग रेझिस्टरची उपस्थिती संबंधित इलेक्ट्रिकल डायग्राम वापरून तपासली जाऊ शकते.
कॅन बस चालत नाही
K-CAN किंवा PT-CAN डेटा बस काम करत नसल्यास, शॉर्ट सर्किट किंवा CAN मध्ये ब्रेक होऊ शकतो किंवा कमी पातळी. किंवा ECU सदोष आहे.
- CAN बस सबस्क्राइबर्सना एकावेळी डिस्कनेक्ट करा जोपर्यंत दोष निर्माण करणारे युनिट सापडत नाही (= कंट्रोल युनिट X).
- शॉर्ट सर्किट किंवा ओपन सर्किटसाठी ECU X च्या तारा तपासा.
- शक्य असल्यास, ECU X तपासा.
- ECU ते CAN बसपर्यंत चाचणी केलेल्या वायरमध्ये शॉर्ट सर्किट झाल्यासच क्रियांचा हा क्रम यशस्वी होतो. CAN बसमधील वायरमध्येच शॉर्ट सर्किट असल्यास, तुम्हाला वायरिंग हार्नेस तपासण्याची आवश्यकता आहे.
आम्ही टायपोग्राफिकल चुका, सिमेंटिक चुका आणि तांत्रिक बदल करण्याचा अधिकार राखून ठेवतो.
प्रणाली सुसंगत आणि सुसंवादीपणे व्यवस्थापित करण्यासाठी आणि डेटा ट्रान्समिशनची गुणवत्ता आणि कार्यक्षमता सुनिश्चित करण्यासाठी, अनेक ऑटोमोटिव्ह कंपन्या वापरतात आधुनिक प्रणाली, CAN बस म्हणून ओळखले जाते. त्याच्या संस्थेचे तत्त्व तपशीलवार विचारात घेण्यास पात्र आहे.
सामान्य वैशिष्ट्ये
दृष्यदृष्ट्या, CAN बस एका असिंक्रोनस अनुक्रमासारखी दिसते. त्याची माहिती दोन ट्विस्टेड कंडक्टर, रेडिओ चॅनेल किंवा ऑप्टिकल फायबरवर प्रसारित केली जाते.
अनेक उपकरणे एकाच वेळी बस नियंत्रित करू शकतात. त्यांची संख्या मर्यादित नाही आणि माहिती विनिमय गती 1 Mbit/s पर्यंत प्रोग्राम केलेली आहे.
आधुनिक कारमधील CAN बस "CAN सोल्यूशन आवृत्ती 2.0" तपशीलाद्वारे नियंत्रित केली जाते.
यात दोन विभाग आहेत. प्रोटोकॉल ए 11-बिट डेटा ट्रान्समिशन सिस्टम वापरून माहितीच्या हस्तांतरणाचे वर्णन करते. 29-बिट आवृत्ती वापरताना भाग B ही कार्ये करतो.
CAN मध्ये वैयक्तिक घड्याळ जनरेटर नोड आहेत. त्यापैकी प्रत्येक एकाच वेळी सर्व यंत्रणांना सिग्नल पाठवते. बसशी जोडलेली प्राप्त करणारी उपकरणे सिग्नल त्यांच्या अधिकारक्षेत्रात आहेत की नाही हे निर्धारित करतात. प्रत्येक सिस्टीमला संबोधित केलेल्या संदेशांचे हार्डवेअर फिल्टरिंग असते.
वाण आणि लेबलिंग
रॉबर्ट बॉशने विकसित केलेली कॅन बस ही आजची सर्वात प्रसिद्ध आहे. कॅन बस (सिस्टम या नावाने ओळखली जाते) अनुक्रमिक असू शकते, जेथे नाडीद्वारे नाडी दिली जाते. त्याला सिरीयल बस म्हणतात. जर अनेक तारांवर माहिती प्रसारित केली गेली असेल तर ही एक समांतर बस आहे.

मी - नियंत्रण युनिट्स;
II - सिस्टम कम्युनिकेशन्स.
CAN बस आयडेंटिफायरच्या प्रकारांवर आधारित, दोन प्रकारचे मार्किंग आहेत.
जर नोड 11-बिट माहिती एक्सचेंज फॉरमॅटला सपोर्ट करतो आणि 29-बिट आयडेंटिफायर सिग्नलवर त्रुटी दर्शवत नाही, तेव्हा त्याला "CAN2.0A सक्रिय, CAN2.0B पॅसिव्ह" असे चिन्हांकित केले जाते.
जेव्हा असे जनरेटर दोन्ही प्रकारचे अभिज्ञापक वापरतात तेव्हा बसला "CAN2.0B Active" असे लेबल दिले जाते.
असे नोड्स आहेत जे 11-बिट स्वरूपात संप्रेषणांना समर्थन देतात, परंतु जेव्हा ते सिस्टममध्ये 29-बिट अभिज्ञापक पाहतात तेव्हा ते एक त्रुटी संदेश प्रदर्शित करतात. आधुनिक कारमध्ये, अशा CAN बसेस वापरल्या जात नाहीत, कारण सिस्टम तार्किक आणि सुसंगत असणे आवश्यक आहे.
सिस्टीम दोन प्रकारच्या सिग्नल ट्रान्समिशन दरांवर चालते - 125, 250 kbit/s. पहिल्यासाठी हेतू आहेत सहाय्यक उपकरणे(विंडो लिफ्टर्स, लाइटिंग), आणि नंतरचे मुख्य नियंत्रण (स्वयंचलित ट्रांसमिशन, इंजिन, एबीएस) प्रदान करतात.
सिग्नल ट्रान्समिशन
CAN बसचा भौतिक कंडक्टर आधुनिक कारदोन घटकांनी बनलेले. पहिला एक काळा आहे आणि त्याला CAN-उच्च म्हणतात. दुसरा कंडक्टर, नारंगी-तपकिरी, CAN-लो म्हणतात. सादर केलेल्या संप्रेषण संरचनेबद्दल धन्यवाद, कार सर्किटमधून बरेच कंडक्टर काढले गेले आहेत. वाहनांच्या उत्पादनामध्ये, हे उत्पादनाचे वजन 50 किलोपर्यंत कमी करण्यास अनुमती देते.

एकूण नेटवर्क लोडमध्ये CAN बस नावाच्या प्रोटोकॉलचा भाग असलेल्या भिन्न ब्लॉक प्रतिरोधांचा समावेश असतो.
प्रत्येक सिस्टीमचे ट्रान्समिशन आणि रिसेप्शन वेग देखील भिन्न आहेत. त्यामुळे विविध प्रकारच्या संदेशांवर प्रक्रिया करणे सुनिश्चित केले जाते. त्यानुसार कॅन बसचे वर्णन, हे कार्य सिग्नल कन्व्हर्टरद्वारे केले जाते. त्याला इलेक्ट्रॉनिक गेटवे म्हणतात.
हे डिव्हाइस कंट्रोल युनिटच्या डिझाइनमध्ये स्थित आहे, परंतु स्वतंत्र डिव्हाइस म्हणून डिझाइन केले जाऊ शकते.
प्रस्तुत इंटरफेस आउटपुट आणि डायग्नोस्टिक सिग्नल इनपुट करण्यासाठी देखील वापरला जातो. या उद्देशासाठी, एक एकीकृत OBD ब्लॉक प्रदान केला आहे. हे सिस्टम डायग्नोस्टिक्ससाठी एक विशेष कनेक्टर आहे.
बस फंक्शन्सचे प्रकार
अस्तित्वात आहे वेगळे प्रकारसादर केलेले उपकरण.

- पॉवर युनिटची कॅन बस. हे एक जलद चॅनल आहे जे 500 kbit/s वेगाने संदेश पाठवते. त्याचे मुख्य कार्य नियंत्रण युनिट्स दरम्यान संवाद साधणे आहे, उदाहरणार्थ ट्रान्समिशन-इंजिन.
- कम्फर्ट सिस्टम 100 kbit/s च्या वेगाने डेटा प्रसारित करणारी एक धीमी चॅनेल आहे. हे सर्व कम्फर्ट सिस्टम उपकरणांना जोडते.
- बस कमांड प्रोग्रॅम देखील हळूहळू सिग्नल प्रसारित करतो (100 kbit/s). दरम्यान संवाद प्रदान करणे हा त्याचा मुख्य उद्देश आहे सेवा प्रणाली, जसे की टेलिफोन आणि नेव्हिगेशन.
कॅन बस म्हणजे काय या प्रश्नाचा अभ्यास करताना, असे दिसते की प्रोग्रामच्या संख्येच्या बाबतीत ती विमान प्रणालीसारखीच आहे. तथापि, वाहन चालवताना गुणवत्ता, सुरक्षितता आणि सोई सुनिश्चित करण्यासाठी, कोणतेही कार्यक्रम अनावश्यक नसतील.
बसमध्ये हस्तक्षेप
सर्व कंट्रोल युनिट्स ट्रान्सीव्हरद्वारे कॅन बसशी जोडलेले आहेत. त्यांच्याकडे संदेश प्राप्त करणारे आहेत, जे निवडक ॲम्प्लीफायर आहेत.
CAN बसचे वर्णन उच्च आणि निम्न कंडक्टरसह डिफरेंशियल ॲम्प्लिफायरकडे संदेशांचे आगमन निर्धारित करते, जिथे त्यावर प्रक्रिया केली जाते आणि नियंत्रण युनिटला पाठवले जाते.
उच्च आणि निम्न तारांमधील व्होल्टेजमधील फरक म्हणून ॲम्प्लिफायर हे आउटपुट सिग्नल निर्धारित करते. हा दृष्टिकोन बाह्य हस्तक्षेपाचा प्रभाव काढून टाकतो.
CAN बस काय आहे आणि त्याची रचना समजून घेण्यासाठी, आपण त्याचे स्वरूप लक्षात ठेवले पाहिजे. हे दोन कंडक्टर एकत्र वळलेले आहेत.

हस्तक्षेप सिग्नल एकाच वेळी दोन्ही तारांवर येत असल्याने, प्रक्रिया करताना कमी व्होल्टेज मूल्य उच्च व्होल्टेजमधून वजा केले जाते.
याबद्दल धन्यवाद, CAN बस एक विश्वासार्ह प्रणाली मानली जाते.
संदेशाचे प्रकार
CAN बसद्वारे माहितीची देवाणघेवाण करताना प्रोटोकॉल चार प्रकारच्या कमांड्स वापरण्याची तरतूद करतो.

मी - कॅन बस;
II - प्रतिकार प्रतिरोधक;
III - इंटरफेस.
माहिती प्राप्त करण्याच्या आणि प्रसारित करण्याच्या प्रक्रियेत, एका ऑपरेशनसाठी विशिष्ट वेळ दिला जातो. ते अयशस्वी झाल्यास, एक त्रुटी फ्रेम व्युत्पन्न होते. एरर फ्रेम देखील ठराविक काळ टिकते. जेव्हा मोठ्या प्रमाणात त्रुटी जमा होतात तेव्हा दोषपूर्ण युनिट आपोआप बसमधून डिस्कनेक्ट होते.
सिस्टम कार्यक्षमता
CAN बस म्हणजे काय हे समजून घेण्यासाठी, तुम्हाला तिचा कार्यात्मक उद्देश समजून घेणे आवश्यक आहे.
हे रिअल-टाइम फ्रेम्स प्रसारित करण्यासाठी डिझाइन केले आहे ज्यामध्ये मूल्य (उदाहरणार्थ, वेगात बदल) किंवा एका ट्रान्समीटर नोडमधून प्रोग्राम रिसीव्हर्सपर्यंत घटना घडण्याची माहिती असते.
कमांडमध्ये 3 विभाग असतात: नाव, इव्हेंट मूल्य, व्हेरिएबलचे निरीक्षण करण्याची वेळ.
इंडिकेटर व्हेरिएबलला मुख्य महत्त्व जोडलेले आहे. जर संदेशामध्ये वेळेची माहिती नसेल, तर हा संदेश प्राप्त झाल्यानंतर सिस्टमद्वारे स्वीकारला जातो.
जेव्हा संप्रेषण प्रणाली संगणक पॅरामीटर स्थिती निर्देशकाची विनंती करतो, तेव्हा ते प्राधान्य क्रमाने पाठवले जाते.
बस वादाचा ठराव
जेव्हा बसमधील सिग्नल एकाधिक कंट्रोलर्सवर येतात, तेव्हा सिस्टम प्रत्येकावर कोणत्या क्रमाने प्रक्रिया केली जाईल हे निवडते. दोन किंवा अधिक उपकरणे जवळजवळ एकाच वेळी कार्य करण्यास प्रारंभ करू शकतात. कोणताही संघर्ष उद्भवणार नाही याची खात्री करण्यासाठी, निरीक्षण केले जाते. आधुनिक कारची CAN बस संदेश पाठवताना हे ऑपरेशन करते.
अग्रक्रमानुसार संदेशांचे श्रेणीकरण आणि रिकेसिव श्रेणीकरण आहे. लवाद फील्डचे सर्वात कमी संख्यात्मक मूल्य असलेली माहिती बसमध्ये संघर्ष झाल्यावर जिंकेल. काहीही बदलले नाही तर उर्वरित ट्रान्समीटर नंतर त्यांच्या फ्रेम पाठवण्याचा प्रयत्न करतील.
माहिती प्रसारित करण्याच्या प्रक्रियेत, सिस्टममध्ये संघर्षाची परिस्थिती असली तरीही त्यात निर्दिष्ट केलेला वेळ गमावला जात नाही.
भौतिक घटक
बस उपकरणामध्ये केबल व्यतिरिक्त अनेक घटक असतात.
ट्रान्सीव्हर चिप्स बहुतेकदा फिलिप्स, तसेच सिलिकॉनिक्स, बॉश, इन्फिनोनमधून आढळतात.
CAN बस म्हणजे काय हे समजून घेण्यासाठी, तुम्ही त्यातील घटकांचा अभ्यास केला पाहिजे. कमाल लांबी 1 Mbit/s च्या गतीने कंडक्टर 40 m पर्यंत पोहोचतो.

हे करण्यासाठी, कंडक्टरच्या शेवटी 120 ओहम प्रतिरोधक स्थापित केले जातात. बसच्या शेवटी संदेशाचे प्रतिबिंब काढून टाकण्यासाठी आणि त्यास योग्य वर्तमान स्तर मिळत असल्याची खात्री करण्यासाठी हे आवश्यक आहे.
कंडक्टर स्वतःच, डिझाइनवर अवलंबून, ढाल किंवा असुरक्षित असू शकतो. शेवटचा प्रतिकार क्लासिकपासून विचलित होऊ शकतो आणि 108 ते 132 ओमपर्यंत असू शकतो.
iCAN तंत्रज्ञान
टायर्सकडे पाहत आहे वाहन, इंजिन ब्लॉकिंग प्रोग्रामकडे लक्ष दिले पाहिजे.
या उद्देशासाठी, CAN बस, iCAN मॉड्यूलद्वारे डेटा एक्सचेंज विकसित केले गेले आहे. हे डिजिटल बसला जोडते आणि संबंधित कमांडसाठी जबाबदार आहे.
हे आकाराने लहान आहे आणि कोणत्याही टायरच्या डब्याला जोडते. जेव्हा कार हलू लागते, तेव्हा iCAN संबंधित ब्लॉक्सना कमांड पाठवते आणि इंजिन थांबते. या प्रोग्रामचा फायदा म्हणजे सिग्नल व्यत्यय नसणे. इलेक्ट्रॉनिक युनिटला सूचना दिली जाते, त्यानंतर संदेश संबंधित ॲक्ट्युएटर्सचे कार्य अक्षम करतो.
या प्रकारची ब्लॉकिंग सर्वोच्च गुप्तता आणि म्हणूनच, विश्वसनीयता द्वारे दर्शविले जाते. या प्रकरणात, ECU मेमरीमध्ये त्रुटी रेकॉर्ड केल्या जात नाहीत. CAN बस या मॉड्युलला वाहनाचा वेग आणि हालचाल याबद्दल सर्व माहिती पुरवते.
चोरी विरोधी संरक्षण
iCAN मॉड्यूल कोणत्याही नोडमध्ये स्थापित केले जाते जेथे हार्नेस स्थित आहेत, जेथे बस स्थापित केली आहे. किमान परिमाणे आणि क्रियांच्या विशेष अल्गोरिदममुळे, चोरी करताना पारंपारिक पद्धती वापरून अवरोधित करणे शोधणे जवळजवळ अशक्य आहे.
बाहेरून, हे मॉड्यूल विविध मॉनिटरिंग सेन्सर म्हणून वेषात आहे, ज्यामुळे ते शोधणे देखील अशक्य होते. इच्छित असल्यास, कारच्या खिडक्या आणि मिरर स्वयंचलितपणे संरक्षित करण्यासाठी डिव्हाइसचे ऑपरेशन कॉन्फिगर करणे शक्य आहे.
वाहनाला स्वयंचलित इंजिन स्टार्ट असल्यास, iCAN त्याच्या ऑपरेशनमध्ये व्यत्यय आणणार नाही, कारण जेव्हा वाहन चालू होते तेव्हा ते ट्रिगर होते.
डेटा एक्सचेंजची रचना आणि तत्त्वे ज्यासह CAN बस संपन्न आहे त्याबद्दल परिचित झाल्यानंतर, हे स्पष्ट होते की सर्व आधुनिक कार वाहन नियंत्रण विकसित करताना या तंत्रज्ञानाचा वापर का करतात.
सादर केलेले तंत्रज्ञान त्याच्या डिझाइनमध्ये बरेच जटिल आहे. तथापि, त्यात समाविष्ट केलेली सर्व कार्ये सर्वात कार्यक्षम, सुरक्षित आणि आरामदायक ड्रायव्हिंग सुनिश्चित करतील.
सध्याच्या घडामोडी चोरीपासूनही वाहनांचे संरक्षण सुनिश्चित करण्यात मदत करतील. याबद्दल धन्यवाद, तसेच इतर फंक्शन्सचे कॉम्प्लेक्स, CAN बस लोकप्रिय आणि मागणीत आहे.
अनेकदा वाहनाच्या इलेक्ट्रॉनिक कंट्रोल सिस्टीममधील खराबी हे मुख्य कारण असते यांत्रिक नुकसान CAN बस किंवा CAN बसवर टांगलेल्या कंट्रोल युनिटचे अपयश.
खाली लेखात कॅन बसचे निदान करण्याचे मार्ग दिले आहेत विविध गैरप्रकार. उदाहरण म्हणून दाखवले ठराविक योजनाव्हॅल्ट्रा टी" मालिकेच्या ट्रॅक्टरवर कॅन बस.
आख्यायिका:
- आयसीएल- इंस्ट्रुमेंटल क्लस्टर (डॅशबोर्ड)
- TC1/TC2- ट्रान्समिशन कंट्रोलर (ट्रान्समिशन कंट्रोल युनिट 1/2)
- ई.सी.- इलेक्ट्रॉनिक कंट्रोलर (इंजिन कंट्रोल युनिट)
- PCU- पंप कंट्रोल युनिट
CAN बस मोजमाप
EC कंट्रोल युनिटमध्ये 120 ओहम टर्मिनेशन रेझिस्टर (कधीकधी या रेझिस्टर्सना टर्मिनेटर म्हणतात) आणि TC1 युनिटच्या शेजारी असलेला रेझिस्टर
डिस्प्ले (बाजूच्या खांबावर) CAN बसशी संबंधित फॉल्ट कोड दाखवत असल्यास, हे CAN बस वायरिंग किंवा कंट्रोल युनिटमधील दोष दर्शवते.
कोणते नियंत्रण युनिट माहिती प्राप्त करू शकत नाही हे सिस्टम स्वयंचलितपणे अहवाल देऊ शकते (कंट्रोल युनिट मॉनिटर्स एकमेकांना माहिती प्रसारित करतात).
डिस्प्ले फ्लॅश होत असल्यास किंवा CAN बस संदेश बसमधून प्रसारित केला जाऊ शकत नसल्यास, दोषपूर्ण CAN बस वायरिंग (किंवा दोषपूर्ण नियंत्रण युनिट) शोधण्यासाठी मल्टीमीटरचा वापर केला जाऊ शकतो.
CAN बसचे कोणतेही भौतिक नुकसान नाही
CAN बसच्या हाय आणि लो वायर्समधील रेझिस्टन्स (कोणत्याही वेळी) अंदाजे 60 ohms असल्यास, मग CAN बसला शारीरिक नुकसान झालेले नाही.
- EC आणि TC1 कंट्रोल युनिट योग्यरीत्या काम करत आहेत, कारण एंड-ऑफ-लाइन रेझिस्टर (120 Ohms) EC युनिटमध्ये आणि TC1 युनिटच्या पुढे स्थित आहेत.
TC2 कंट्रोल युनिट आणि ICL इन्स्ट्रुमेंट पॅनल देखील शाबूत आहे कारण CAN बस या युनिटमधून जाते.
कॅन बसचे नुकसान झाले आहे

CAN बसच्या हाय आणि लो वायर्समधील रेझिस्टन्स (कोणत्याही वेळी) अंदाजे 120 ohms असेल, तर CAN बस वायरिंग खराब होते (एक किंवा दोन्ही वायर).
CAN बसचे शारीरिक नुकसान झाले आहे

CAN बस खराब झाल्यास, नुकसानीचे स्थान निश्चित करणे आवश्यक आहे.
प्रथम, CAN-Lo लाइनचा प्रतिकार मोजला जातो, उदाहरणार्थ EC आणि TC2 कंट्रोल युनिट्स दरम्यान.
म्हणून, लो-लो किंवा हाय-हाय कनेक्टर्स दरम्यान मोजमाप केले जाणे आवश्यक आहे. जर प्रतिकार अंदाजे 0 ओहम असेल तर मोजलेल्या बिंदूंमधील वायर खराब होत नाही.
जर प्रतिकार अंदाजे 240 ohms असेल तर मोजलेल्या बिंदूंच्या दरम्यान बस खराब झाली आहे. चित्र TC1 कंट्रोल युनिट आणि ICL इन्स्ट्रुमेंट पॅनेलमधील CAN-Lo वायरचे नुकसान दाखवते.
CAN बसमध्ये शॉर्ट सर्किट

CAN-Hi आणि CAN-Lo तारांमधील प्रतिकार अंदाजे 0 ohms असल्यास, CAN बसमध्ये शॉर्ट सर्किट झाले आहे.
कंट्रोल युनिटपैकी एक डिस्कनेक्ट करा आणि कंट्रोल युनिटवरील CAN-Hi आणि CAN-Lo कनेक्टरच्या संपर्कांमधील प्रतिकार मोजा. डिव्हाइस योग्यरित्या कार्य करत असल्यास, ते पुन्हा स्थापित करा.
नंतर पुढील डिव्हाइस डिस्कनेक्ट करा, मोजमाप घ्या. सदोष उपकरण आढळून येईपर्यंत या पद्धतीने सुरू ठेवा. जर प्रतिकार अंदाजे 0 ohms असेल तर युनिट दोषपूर्ण आहे.
जर सर्व ब्लॉक तपासले गेले आणि मोजमाप अद्याप शॉर्ट सर्किट दर्शवत असेल, तर CAN बस वायरिंग सदोष आहे. तारा कुठे खराब झाल्या आहेत हे शोधण्यासाठी, ते दृष्यदृष्ट्या तपासले पाहिजेत.
CAN बस व्होल्टेज मापन

पॉवर चालू करा आणि CAN-Hi, CAN-Lo वायर आणि ग्राउंड वायरमधील व्होल्टेज मोजा.
व्होल्टेज 2.4 - 2.7 V च्या श्रेणीत असावे.
CAN बस हे असे उपकरण आहे जे इतर कार प्रणालींसोबत माहितीची देवाणघेवाण करून कार नियंत्रित करणे सोपे करते. एका वाहन युनिटमधून दुसऱ्या वाहन युनिटमध्ये डेटा ट्रान्सफर एन्क्रिप्शन वापरून विशेष चॅनेलद्वारे केला जातो.
[लपवा]
CAN बस म्हणजे काय
कारमधील इलेक्ट्रॉनिक CAN इंटरफेस हे कंट्रोलर्सचे नेटवर्क आहे जे सर्व कंट्रोल मॉड्यूल्स एका सिस्टीममध्ये एकत्र करण्यासाठी वापरले जाते.
हा इंटरफेस एक ब्लॉक आहे ज्यासह खालील ब्लॉक वायर्सद्वारे कनेक्ट केले जाऊ शकतात:
- ऑटो-स्टार्ट फंक्शनसह किंवा त्याशिवाय सुसज्ज अँटी-थेफ्ट सिस्टम;
- मशीन मोटर नियंत्रण प्रणाली;
- अँटी-लॉक युनिट;
- सुरक्षा प्रणाली, विशेषत: एअरबॅग्ज;
- व्यवस्थापन स्वयंचलित प्रेषणगीअर्स;
- नियंत्रण पॅनेल इ.
डिव्हाइस आणि बस कुठे आहे
संरचनात्मकदृष्ट्या, CAN बस प्लास्टिकच्या केसमध्ये बनवलेला ब्लॉक किंवा केबल्स जोडण्यासाठी कनेक्टर आहे. डिजिटल इंटरफेसमध्ये CAN नावाचे अनेक कंडक्टर असतात. ब्लॉक्स आणि डिव्हाइसेस कनेक्ट करण्यासाठी एक केबल वापरली जाते.
डिव्हाइसची स्थापना स्थान वाहन मॉडेलवर अवलंबून असते. सहसा ही सूक्ष्मता सेवा मॅन्युअलमध्ये दर्शविली जाते. CAN बस वाहनाच्या आतील भागात, नियंत्रण पॅनेलखाली स्थापित केली जाते आणि काहीवेळा ती इंजिनच्या डब्यातही असू शकते.
हे कस काम करत?
ऑपरेशनचे तत्त्व स्वयंचलित प्रणालीकोडेड संदेश प्रसारित करणे समाविष्ट आहे. त्यांच्यापैकी प्रत्येकाला एक विशेष ओळखकर्ता आहे जो अद्वितीय आहे. उदाहरणार्थ, "तापमान पॉवर युनिट 100 अंश आहे" किंवा "कारचा वेग 60 किमी/तास आहे". संदेश प्रसारित करताना, सर्व इलेक्ट्रॉनिक मॉड्यूल्सना संबंधित माहिती प्राप्त होईल, जी ओळखकर्त्यांद्वारे सत्यापित केली जाते. जेव्हा डिव्हाइसेस दरम्यान प्रसारित केलेला डेटा विशिष्ट ब्लॉकशी संबंधित असतो, तेव्हा त्यावर प्रक्रिया केली जाते, जर नसेल तर त्याकडे दुर्लक्ष केले जाते;
CAN बस आयडेंटिफायरची लांबी 11 किंवा 29 बिट असू शकते.
प्रत्येक माहिती ट्रान्समीटर इंटरफेसवर प्रसारित केलेला डेटा एकाच वेळी वाचतो. अधिक असलेले डिव्हाइस कमी प्राथमिकतासह प्रबळ पातळी पासून, टायर सोडा पाहिजे उच्च दरत्याचे प्रसारण विकृत करते. त्याच वेळी, वाढीव मूल्यासह पॅकेज अस्पर्शित राहते. कनेक्शन गमावलेले ट्रान्समीटर विशिष्ट वेळेनंतर ते पुनर्संचयित करते.
सिग्नलिंग डिव्हाइस किंवा मॉड्यूलशी कनेक्ट केलेला इंटरफेस स्वयंचलित प्रारंभ, वेगवेगळ्या मोडमध्ये ऑपरेट करू शकतात:
- पार्श्वभूमी, ज्याला स्लीपिंग किंवा स्टँडअलोन म्हणतात. ते चालू असताना, मशीनच्या सर्व प्रमुख प्रणाली अक्षम केल्या जातात. परंतु त्याच वेळी, डिजिटल इंटरफेसला मेनमधून उर्जा मिळते. व्होल्टेज किमान आहे, जे बॅटरी डिस्चार्ज प्रतिबंधित करते.
- स्टार्टअप किंवा वेक-अप मोड. जेव्हा ड्रायव्हर लॉकमध्ये की घालतो आणि इग्निशन सक्रिय करण्यासाठी वळतो तेव्हा ते कार्य करण्यास सुरवात करते. जर मशीन स्टार्ट/स्टॉप बटणाने सुसज्ज असेल, तर ते दाबल्यावर असे होते. व्होल्टेज स्थिरीकरण पर्याय सक्रिय केला जात आहे. कंट्रोलर आणि सेन्सर्सना वीज पुरवली जाते.
- सक्रिय. जेव्हा हा मोड सक्रिय केला जातो, तेव्हा डेटा एक्सचेंज प्रक्रिया नियंत्रक आणि दरम्यान केली जाते ॲक्ट्युएटर्स. सर्किट व्होल्टेज पॅरामीटर वाढते कारण इंटरफेस 85 एमए पर्यंत वर्तमान काढू शकतो.
- निष्क्रिय होणे किंवा झोप येणे. पॉवरट्रेन थांबते तेव्हा, CAN बस स्टॉपशी जोडलेली सर्व यंत्रणा आणि घटक कार्य करतात. पासून ते निष्क्रिय केले आहेत विद्युत नेटवर्कवाहन.
वैशिष्ट्ये
डिजिटल इंटरफेसचे तांत्रिक गुणधर्म:
- सामान्य माहिती हस्तांतरण गती सुमारे 1 Mb/s आहे;
- कंट्रोल युनिट्स दरम्यान डेटा पाठवताना विविध प्रणालीहा आकडा 500 kb/s पर्यंत कमी झाला आहे;
- "कम्फर्ट" प्रकारच्या इंटरफेसमध्ये माहिती हस्तांतरणाची गती नेहमी 100 kb/s असते.
"इलेक्ट्रिकल इंजिनीअरिंग आणि इलेक्ट्रॉनिक्स फॉर प्रोग्रामर" चॅनेलने पॅकेट डेटा पाठवण्याच्या तत्त्वाबद्दल तसेच डिजिटल अडॅप्टरच्या वैशिष्ट्यांबद्दल सांगितले.
CAN बसचे प्रकार
पारंपारिकपणे, वापरलेल्या अभिज्ञापकांनुसार CAN बस दोन प्रकारांमध्ये विभागल्या जाऊ शकतात:
- KAN2, 0A. अशा प्रकारे ते चिन्हांकित केले जातात डिजिटल उपकरणे, जे 11-बिट डेटा एक्सचेंज फॉरमॅटमध्ये ऑपरेट करू शकते. या प्रकारचा इंटरफेस, व्याख्येनुसार, 29 बिट्ससह कार्यरत मॉड्यूल्समधील सिग्नलवरील त्रुटी शोधू शकत नाही.
- CH2, 0V. अशा प्रकारे 11-बिट फॉरमॅटमध्ये कार्यरत डिजिटल इंटरफेस चिन्हांकित केले जातात. परंतु मुख्य वैशिष्ट्य 29-बिट अभिज्ञापक आढळल्यास त्रुटी डेटा मायक्रोप्रोसेसर उपकरणांवर प्रसारित केला जाईल.
CAN बस त्यांच्या प्रकारानुसार तीन श्रेणींमध्ये विभागल्या जाऊ शकतात:
- कारच्या पॉवर युनिटसाठी. तुम्ही या प्रकारच्या इंटरफेसशी कनेक्ट केल्यास, हे अतिरिक्त चॅनेलद्वारे नियंत्रण प्रणाली दरम्यान जलद संप्रेषण करण्यास अनुमती देईल. बसचा उद्देश इंजिन ECU चे ऑपरेशन इतर घटकांसह समक्रमित करणे आहे. उदाहरणार्थ, गिअरबॉक्स अँटी-लॉक ब्रेकिंग सिस्टमइ.
- आरामदायी प्रकारची उपकरणे. या प्रकारातील डिजिटल इंटरफेसचा वापर या श्रेणीतील सर्व प्रणालींना जोडण्यासाठी केला जातो. उदा. इलेक्ट्रॉनिक समायोजनआरसे, गरम जागा इ.
- माहिती आणि कमांड इंटरफेस. त्यांच्याकडे एक समान माहिती हस्तांतरण गती आहे. ते वाहन सेवा देण्यासाठी आवश्यक असलेल्या नोड्स दरम्यान उच्च-गुणवत्तेचे संप्रेषण सुनिश्चित करण्यासाठी वापरले जातात. उदाहरणार्थ, दरम्यान इलेक्ट्रॉनिक युनिटव्यवस्थापन आणि नेव्हिगेशन प्रणालीकिंवा स्मार्टफोन.
"इलेक्ट्रिकल इंजिनीअरिंग आणि इलेक्ट्रॉनिक्स फॉर प्रोग्रामर" चॅनेल ऑपरेशनच्या तत्त्वाबद्दल तसेच डिजिटल इंटरफेसच्या प्रकारांबद्दल बोलले.
CAN बस द्वारे अलार्म कनेक्ट करण्यासाठी सूचना
स्थापनेदरम्यान चोरी विरोधी प्रणालीत्याच्याशी कनेक्ट करण्याचा एक सोपा मार्ग ऑन-बोर्ड नेटवर्क- बांधणे सुरक्षा स्थापनाडिजिटल इंटरफेससह. परंतु कारमध्ये CAN बस असल्यास ही पद्धत शक्य आहे.
कार अलार्म स्थापित करण्यासाठी आणि त्यास CAN इंटरफेसशी कनेक्ट करण्यासाठी, आपल्याला सिस्टम कंट्रोल युनिटची स्थापना स्थान माहित असणे आवश्यक आहे.
जर अलार्म तज्ञांनी स्थापित केला असेल तर आपल्याला या समस्येसाठी सर्व्हिस स्टेशनवर मदत घेणे आवश्यक आहे. सामान्यत: डिव्हाइस वाहनाच्या डॅशबोर्डच्या मागे किंवा खाली स्थित असते. कधीकधी इंस्टॉलर मायक्रोप्रोसेसर मॉड्यूल स्थापित करतात मोकळी जागाग्लोव्ह कंपार्टमेंट किंवा कार रेडिओच्या मागे.
तुम्हाला काय लागेल?
कार्य पूर्ण करण्यासाठी आपल्याला आवश्यक असेलः
- मल्टीमीटर;
- स्टेशनरी चाकू;
- इन्सुलेट टेप;
- स्क्रू ड्रायव्हर
स्टेप बाय स्टेप कृती
कनेक्शन प्रक्रिया चोरी विरोधी स्थापनाकॅन बससाठी खालीलप्रमाणे केले जाते:
- प्रथम आपण सर्व घटक याची खात्री करणे आवश्यक आहे सुरक्षा संकुलस्थापित आणि कार्यरत. आम्ही मायक्रोप्रोसेसर युनिट, अँटेना मॉड्यूलबद्दल बोलत आहोत, सेवा बटण, सायरन, तसेच मर्यादा स्विचेस. जर अलार्म सिस्टममध्ये स्वयं-प्रारंभ पर्याय असेल, तर तुम्हाला हे डिव्हाइस योग्यरित्या स्थापित केले आहे याची खात्री करणे आवश्यक आहे. अँटी-थेफ्ट इंस्टॉलेशनचे सर्व घटक मायक्रोप्रोसेसर युनिटशी जोडलेले आहेत.
- CAN बसमध्ये जाणाऱ्या मुख्य कंडक्टरचा शोध घेतला जातो. ते जाड आहे आणि त्याचे इन्सुलेशन सहसा केशरी असते.
- मुख्य कार अलार्म युनिट या संपर्काशी जोडलेले आहे. कार्य करण्यासाठी, डिजिटल इंटरफेस कनेक्टर वापरला जातो.
- कंट्रोल युनिट स्थापित केले जात आहे सुरक्षा यंत्रणा, ते स्थापित केले नसल्यास. ते कोरड्या जागी ठेवावे जे डोळ्यांना प्रवेश करू शकत नाही. स्थापनेनंतर, डिव्हाइस योग्यरित्या निश्चित केले जाणे आवश्यक आहे, अन्यथा हालचाली दरम्यान ते कंपनांमुळे नकारात्मकरित्या प्रभावित होईल. परिणामी, हे मॉड्यूल जलद अपयशी ठरेल.
- कंडक्टरचे जंक्शन काळजीपूर्वक इन्सुलेट केले जाते उष्णता-संकुचित नळ्या वापरण्याची परवानगी आहे. विद्युत टेपसह तारा गुंडाळण्याची शिफारस केली जाते. हे त्यांचे सेवा आयुष्य वाढवेल आणि इन्सुलेटिंग लेयरचे घर्षण टाळेल. कनेक्शन पूर्ण झाल्यावर, तपासणी केली जाते. पॅकेट डेटा प्रसारित करण्यात समस्या उद्भवल्यास, आपण इलेक्ट्रिकल सर्किट्सच्या अखंडतेचे निदान करण्यासाठी मल्टीमीटर वापरला पाहिजे.
- अंतिम टप्प्यावर, उपलब्ध असल्यास, अतिरिक्त चॅनेलसह सर्व संप्रेषण चॅनेल कॉन्फिगर केले आहेत. हे सुनिश्चित करेल अखंड ऑपरेशनसुरक्षा यंत्रणा. सेटिंगसाठी वापरले जाते सेवा पुस्तक, अँटी-थेफ्ट इंस्टॉलेशनमध्ये समाविष्ट आहे.
Sigmax69 वापरकर्त्याने Hyundai Solaris 2017 कारचे उदाहरण वापरून डिजिटल इंटरफेससह सुरक्षा प्रणाली कनेक्ट करण्याविषयी सांगितले.
खराबी
CAN इंटरफेस अनेक वाहन प्रणालींशी जोडलेला असल्याने, बिघाड झाल्यास किंवा चुकीचे ऑपरेशननोड्सपैकी एकास समस्या येऊ शकतात. त्यांच्या उपस्थितीमुळे मुख्य युनिट्सच्या कामकाजावर परिणाम होईल.
चिन्हे आणि कारणे
खालील "लक्षणे" खराब होण्याचे संकेत देऊ शकतात:
- वर डॅशबोर्डविनाकारण एकाच वेळी अनेक आयकॉन आले - एअरबॅग, सुकाणू, स्नेहन प्रणाली मध्ये दबाव, इ.;
- प्रकाश दिसू लागला निर्देशक तपासाइंजिन;
- पॉवर युनिटचे तापमान, टाकीमधील इंधन पातळी, वेग इत्यादींबद्दल नियंत्रण पॅनेलवर कोणतीही माहिती नाही.
CAN इंटरफेसच्या ऑपरेशनमध्ये खराबी का उद्भवू शकते याची कारणे:
- सिस्टमपैकी एकामध्ये तुटलेली वायरिंग किंवा पॉवर लाईन्सचे नुकसान;
- युनिट्सच्या ऑपरेशनमध्ये बॅटरी किंवा जमिनीवर शॉर्ट सर्किट;
- कनेक्टरवरील रबर जंपर्सचे नुकसान;
- संपर्कांचे ऑक्सिडेशन, परिणामी सिस्टम दरम्यान सिग्नल ट्रान्समिशन विस्कळीत होते;
- कारच्या बॅटरीचा डिस्चार्ज किंवा इलेक्ट्रिकल नेटवर्कमधील व्होल्टेज कमी होणे, जे जनरेटर सेटच्या अयोग्य कार्याशी संबंधित आहे;
- CAN-उच्च किंवा CAN-लो सिस्टम बंद करणे;
- इग्निशन कॉइलच्या ऑपरेशनमध्ये खराबी दिसणे.
KV Avtoservis चॅनेलने डिजिटल इंटरफेस अयशस्वी होण्याबद्दल आणि संगणक वापरून चाचणीबद्दल अधिक तपशीलवार सांगितले.
निदान
समस्येचे कारण निश्चित करण्यासाठी, आपल्याला परीक्षकाची आवश्यकता असेल, मल्टीमीटर वापरण्याची शिफारस केली जाते.
पडताळणी प्रक्रिया:
- CAN बसच्या वळणदार जोडी कंडक्टरचा शोध घेऊन निदान सुरू होते. केबलमध्ये काळा किंवा नारंगी-राखाडी इन्सुलेशन आहे. पहिला प्रबळ स्तर आहे, आणि दुसरा दुय्यम स्तर आहे.
- मल्टीमीटर वापरुन, संपर्क घटकांवरील व्होल्टेज पातळी तपासली जाते. एखादे कार्य करत असताना, इग्निशन चालू करणे आवश्यक आहे. चाचणी प्रक्रिया 0 ते 11 व्होल्टच्या श्रेणीतील व्होल्टेज प्रकट करेल. सराव मध्ये हे सहसा 4.5 V असते.
- इग्निशन बंद आहे. नकारात्मक संपर्कासह कंडक्टर बॅटरीपासून डिस्कनेक्ट झाला आहे, क्लॅम्प सोडविण्यासाठी रेंच वापरा.
- कंडक्टरमधील प्रतिरोधक मापदंड मोजला जातो. जर हे मूल्य शून्य असेल तर संपर्क बंद आहेत हे तुम्हाला कळू शकते. जेव्हा निदानाने दर्शविले की प्रतिकार असीम आहे, तेव्हा पॉवर लाइनमध्ये ब्रेक आहे. समस्या थेट संपर्कात असू शकते. कनेक्टर आणि सर्व वायर अधिक तपशीलवार तपासणे आवश्यक आहे.
- सराव मध्ये, नियंत्रण उपकरणांच्या बिघाडामुळे सामान्यतः शॉर्ट सर्किट होते. अयशस्वी मॉड्यूल शोधण्यासाठी, प्रत्येक युनिट एक एक करून बंद करा आणि प्रतिरोध मूल्य तपासा.
वापरकर्ता फिलाट ओगोरोडनिकोव्ह ऑसिलोस्कोप वापरून कॅन बसचे निदान करण्याबद्दल बोलले.
आपल्या स्वत: च्या हातांनी विश्लेषक कसे बनवायचे?
विधानसभा स्वतः करा या उपकरणाचेइलेक्ट्रॉनिक्स आणि इलेक्ट्रिकल अभियांत्रिकी क्षेत्रातील व्यावसायिकच हे करू शकतात.
प्रक्रियेचे मुख्य बारकावे:
- गॅलरीमधील पहिल्या फोटोमधील आकृतीनुसार, तुम्हाला विश्लेषक विकसित करण्यासाठी सर्व घटक खरेदी करणे आवश्यक आहे. त्यावर घटक लेबल केलेले आहेत. तुम्हाला STM32F103С8Т6 कंट्रोलरसह बोर्डची आवश्यकता असेल. तुम्हाला स्थिर नियंत्रण उपकरणाचे इलेक्ट्रिकल सर्किट आणि CAN ट्रान्सीव्हर MCP2551 आवश्यक असेल.
- आवश्यक असल्यास, विश्लेषकामध्ये ब्लूटूथ मॉड्यूल जोडले जाते. हे तुम्हाला तुमच्या मोबाइल डिव्हाइसवर डिव्हाइस वापरताना मूलभूत माहिती रेकॉर्ड करण्यास अनुमती देईल.
- प्रोग्रामिंग प्रक्रिया कोणत्याही उपयुक्तता वापरून केली जाते. KANHacker किंवा Arduino प्रोग्राम वापरण्याची शिफारस केली जाते. पहिला पर्याय अधिक कार्यक्षम आहे आणि त्यात पॅकेट डेटा फिल्टर करण्याचा पर्याय आहे.
- फर्मवेअर पार पाडण्यासाठी, तुम्हाला यूएसबी-टीटीएल रूपांतरण डिव्हाइसची आवश्यकता असेल ते डीबगिंगसाठी आवश्यक असेल; ST-Link आवृत्ती 2 वापरणे हा एक सोपा पर्याय आहे.
- तुमच्या संगणकावर प्रोग्राम डाउनलोड केल्यानंतर, मुख्य EXE फाइल प्रोग्रामर वापरून कंट्रोलरमध्ये फ्लॅश करणे आवश्यक आहे. कार्य पूर्ण केल्यानंतर, बूटलोडर जम्पर स्थापित केला जातो आणि उत्पादित डिव्हाइस USB आउटपुटद्वारे पीसीशी कनेक्ट केले जाते.
- तुम्ही विश्लेषक वापरून फर्मवेअर अपलोड करू शकता सॉफ्टवेअर MPHIDFlash.
- सॉफ्टवेअर अपडेट पूर्ण झाल्यावर, तुम्हाला वायर डिस्कनेक्ट करणे आणि जम्पर काढणे आवश्यक आहे. चालक बसवले जात आहेत. जर डिव्हाइस योग्यरित्या एकत्र केले असेल, तर ते संगणकावर COM पोर्ट म्हणून आढळेल; हे कार्य व्यवस्थापकामध्ये पाहिले जाऊ शकते.
फोटो गॅलरी
CAN विश्लेषक विकसित करण्याची योजना डिव्हाइस असेंब्लीसाठी मुख्य बोर्ड
CAN बसचे फायदे आणि तोटे
डिजिटल इंटरफेसचे फायदे:
- कामगिरी. डिव्हाइस वेगवेगळ्या प्रणालींमध्ये पॅकेट डेटाची त्वरित देवाणघेवाण करू शकते.
- इलेक्ट्रोमॅग्नेटिक हस्तक्षेप उच्च प्रतिकार.
- सर्व डिजिटल इंटरफेसमध्ये बहु-स्तरीय नियंत्रण प्रणाली असते. याबद्दल धन्यवाद, आपण माहिती प्रसारित करताना आणि प्राप्त करताना त्रुटी टाळू शकता.
- ऑपरेशन दरम्यान, टायर स्वतः चॅनेलमध्ये वेग पसरवतो स्वयंचलित मोड. याबद्दल धन्यवाद हे सुनिश्चित केले आहे प्रभावी काम इलेक्ट्रॉनिक प्रणालीवाहन.
- डिजिटल इंटरफेस सुरक्षित आहे. जर एखाद्याने कारच्या इलेक्ट्रॉनिक घटक आणि सिस्टममध्ये बेकायदेशीर प्रवेश मिळवण्याचा प्रयत्न केला तर बस आपोआप हा प्रयत्न रोखेल.
- डिजिटल इंटरफेसच्या उपस्थितीमुळे मानक ऑन-बोर्ड नेटवर्कमध्ये कमीतकमी हस्तक्षेपासह कारवर सुरक्षा प्रणालीची स्थापना सुलभ करणे शक्य होते.
कॅन बसचे तोटे:
- काही इंटरफेसमध्ये किती माहिती हस्तांतरित केली जाऊ शकते यावर निर्बंध असतात. इलेक्ट्रॉनिक्ससह "स्टफड" आधुनिक कारसाठी ही कमतरता लक्षणीय असेल. जोडताना अतिरिक्त उपकरणेपेक्षा जास्त टायर सहन करतो उच्च भार. यामुळे, प्रतिसाद वेळ कमी होतो.
- बसमधून प्रसारित केलेल्या सर्व पॅकेट डेटाचा विशिष्ट उद्देश असतो. च्या साठी उपयुक्त माहितीरहदारीचा किमान भाग वाटप केला जातो.
- प्रोटोकॉल वापरल्यास उच्च पातळी, यामुळे मानकीकरणाचा अभाव होईल.
व्हिडिओ "स्वतः करा इंटरफेस दुरुस्ती"
वापरकर्ता रोमन ब्रॉकने फोर्ड फोकस 2 रीस्टाईल कारमध्ये डॅशबोर्ड टायर पुनर्संचयित करण्याच्या प्रक्रियेबद्दल सांगितले.
निदान आणि दुरुस्ती: CAN बस
21.02.2006
हे "टायर" सारखे दिसते (बहुतेक)कॅन ", ज्याचा आम्हाला अलीकडे वारंवार सामना करावा लागला आहे:
फोटो 1
ही एक सामान्य दोन-वायर केबल आहे ज्याला ट्विस्टेड पेअर म्हणतात .
फोटो 1 वायर दर्शवितो कॅन उच्चआणि पॉवर युनिटचा कॅन कमी.
या तारा नियंत्रण युनिट्स दरम्यान डेटा एक्सचेंज करतात; क्रँकशाफ्ट, इग्निशन टाइमिंग इ.
कृपया लक्षात घ्या की तारांपैकी एक अतिरिक्त काळ्या पट्ट्यासह चिन्हांकित आहे. अशा प्रकारे वायर चिन्हांकित आणि दृश्यमानपणे ओळखली जातेकॅन उच्च (केशरी-काळा).
वायर रंगकॅन-कमी - नारिंगी-तपकिरी.
टायरच्या मुख्य रंगासाठीकॅन केशरी रंग स्वीकारला जातो.
चित्रे आणि रेखाचित्रांमध्ये बसच्या तारांचे रंग चित्रित करण्याची प्रथा आहेकॅन इतर रंग, म्हणजे:

फोटो २
कॅन-उच्च - पिवळा
कॅन-कमी - हिरवा
टायरचे अनेक प्रकार आहेतकॅन , ते करत असलेल्या कार्यांद्वारे निर्धारित केले जाते:
पॉवरट्रेन कॅन बस(जलद चॅनेल) .
ती परवानगी देते 500 kbit/s च्या वेगाने माहिती प्रसारित करते आणि नियंत्रण युनिट्समधील संवादासाठी वापरली जाते (इंजिन - ट्रान्समिशन)
आरामदायी कॅन बस(मंद चॅनेल) .
ती परवानगी देते 100 kbit/s च्या वेगाने माहिती प्रसारित करा आणि कम्फर्ट सिस्टममध्ये समाविष्ट असलेल्या कंट्रोल युनिट्समधील संवादासाठी वापरली जाते.
माहिती आणि आदेश प्रणाली CAN डेटा बस(स्लो चॅनेल), 100 kBit/s वेगाने डेटा ट्रान्समिशनला अनुमती देते. संवाद प्रदान करतेविविध सेवा प्रणालींमध्ये (उदाहरणार्थ, टेलिफोन आणि नेव्हिगेशन सिस्टम).
सुरक्षा, आराम आणि पर्यावरण मित्रत्वासाठी घोषित कार्यांच्या संख्येच्या बाबतीत - नवीन कार मॉडेल्स अधिकाधिक विमानांसारखे होत आहेत. तेथे अधिकाधिक नियंत्रण युनिट्स आहेत आणि तारांच्या प्रत्येक गुच्छातून "खेचणे" अवास्तव आहे.
म्हणून, टायर व्यतिरिक्तकॅन आधीच नावाचे इतर टायर आहेत:
- लिन बस (सिंगल-वायर बस)
- सर्वाधिक बस (फायबर ऑप्टिक बस)
- ब्लूटूथ वायरलेस बस
परंतु आपण "आपले विचार झाडाखाली पसरवू नका," आता आपले लक्ष एका विशिष्ट टायरवर केंद्रित करूया:कॅन (महामंडळाच्या मतानुसारबॉश).
उदाहरण म्हणून CAN बस वापरणे पॉवर युनिट, आपण सिग्नल आकार पाहू शकता:

फोटो 3
हाय CAN बसवर असताना प्रबळ स्थिती, वायरवरील व्होल्टेज 3.5 व्होल्टपर्यंत वाढते.
रेक्सेटिव्ह अवस्थेत, दोन्ही तारांवरील व्होल्टेज 2.5 व्होल्ट आहे.
लाईनवर असतानाकमी प्रबळ स्थिती, व्होल्टेज 1.5 व्होल्टपर्यंत खाली येते.
(“प्रबळ” ही एक घटना आहे जी कोणत्याही क्षेत्रात वर्चस्व गाजवते, वर्चस्व गाजवते किंवा वर्चस्व गाजवते, शब्दकोषांमधून).
डेटा ट्रान्समिशनची विश्वासार्हता वाढवण्यासाठी, बसकॅन दोन तारांवर सिग्नल प्रसारित करण्याची एक विभेदक पद्धत म्हणतातट्विस्टेड जोडी . आणि ही जोडी तयार करणाऱ्या तारांना म्हणतात CAN उच्च आणि CAN कमी .
बसच्या सुरुवातीच्या स्थितीत, दोन्ही तारांना आधार दिला जातो सतत दबावएका विशिष्ट (मूलभूत) स्तरावर. बससाठीकॅन पॉवर युनिट ते अंदाजे 2.5 व्होल्ट आहे.
या प्रारंभिक अवस्थेला "विश्रांती अवस्था" किंवा "विश्रांती अवस्था" असे म्हणतात.
सिग्नल कसे प्रसारित आणि रूपांतरित केले जातात?बस जाऊ शकते का?
प्रत्येक कंट्रोल युनिटला जोडलेले आहेकॅन ट्रान्सीव्हर नावाच्या वेगळ्या उपकरणाद्वारे बस, ज्यामध्ये सिग्नल रिसीव्हर आहे, जो सिग्नल इनपुटवर स्थापित केलेला एक विभेदक ॲम्प्लीफायर आहे:

फोटो ४
वायरने येत आहेउच्च आणि निम्न सिग्नल विभेदक ॲम्प्लिफायरमध्ये प्रवेश करतात, त्यावर प्रक्रिया केली जाते आणि नियंत्रण युनिटच्या इनपुटवर पाठविली जाते.
हे सिग्नल डिफरेंशियल ॲम्प्लिफायरच्या आउटपुटवर व्होल्टेजचे प्रतिनिधित्व करतात.
डिफरेंशियल ॲम्प्लिफायर हे आउटपुट व्होल्टेज CAN बसच्या उच्च आणि निम्न तारांवरील व्होल्टेजमधील फरक म्हणून निर्माण करतो.
हे बेस व्होल्टेजचा प्रभाव दूर करते (पॉवर युनिटच्या CAN बससाठी ते 2.5 V आहे) किंवा कोणत्याही व्होल्टेजमुळे, उदाहरणार्थ, बाह्य आवाजामुळे.
तसे, हस्तक्षेप बद्दल. जसे ते म्हणतात, "टायरकॅन हे हस्तक्षेपास जोरदार प्रतिरोधक आहे, म्हणूनच ते मोठ्या प्रमाणावर वापरले जाते."
चला हे शोधण्याचा प्रयत्न करूया.
CAN बस वायर पॉवर युनिट मध्ये स्थित आहे इंजिन कंपार्टमेंटआणि ते विविध प्रकारच्या हस्तक्षेपामुळे प्रभावित होऊ शकतात, उदाहरणार्थ, इग्निशन सिस्टममधील हस्तक्षेप.
CAN बस असल्याने दोन वायर्स असतात ज्या एकत्र वळवल्या जातात, नंतर हस्तक्षेप एकाच वेळी दोन तारांवर परिणाम करतो:

वरील आकृतीवरून तुम्ही पुढे काय होते ते पाहू शकता: विभेदक ॲम्प्लिफायरमध्ये, लो वायरवरील व्होल्टेज (1.5 V - "पृ ") व्होल्टेजमधून वजा केले जाते
उच्च वायरवर (3.5 V - "पृ ") आणि प्रक्रिया केलेल्या सिग्नलमध्ये कोणताही हस्तक्षेप नाही ("पीपी" - हस्तक्षेप).

टीप: वेळेच्या उपलब्धतेवर अवलंबून, लेख चालू ठेवला जाऊ शकतो - बरेच काही "पडद्यामागे" राहते.
कुचेर व्ही.पी.
© Legion-Avtodata
तुम्हाला यामध्ये देखील स्वारस्य असू शकते: