क्षैतिज विमानात लक्ष्य हाताळणे हे बदलत्या मार्गावर आणि उड्डाण गतीपर्यंत खाली येते. “मॅन्युव्हर” पद्धतीचा वापर करून लढाऊ मार्गदर्शनाच्या पहिल्या आणि दुसऱ्या टप्प्यात हवाई लक्ष्य युक्तीचा प्रभाव वेगवेगळ्या प्रकारे प्रकट होतो.
आपण असे गृहीत धरू की मार्गदर्शन पहिल्या टप्प्यावर केले जाते, जेव्हा हवाई लक्ष्य आणि फायटर अनुक्रमे बिंदूंवर होते. IN आणि ए (Fig. 7.9.), आणि त्यांची बैठक बिंदूवर शक्य होती बद्दल एस .
तांदूळ. ७.९. क्षैतिज विमानात लक्ष्य युक्तीचा प्रभाव
लढाऊ विमानाच्या उड्डाण मार्गावर
जर हवाई लक्ष्य बिंदूवर असेल IN अभ्यासक्रम आणि वेळ हाताळले ट कोपऱ्याकडे वळले w t , तर सेनानीने मार्गदर्शनाच्या दुसऱ्या टप्प्याच्या टर्न आर्कच्या स्पर्शिकेचे अनुसरण करण्यासाठी, त्याचा मार्ग त्याच वेळी एका कोनाने बदलला पाहिजे w आणि t . हवाई लक्ष्याने युक्ती पूर्ण केल्यानंतर, त्या ठिकाणी भेटणे शक्य होईल सह , आणि बिंदूपर्यंतच्या हवाई लक्ष्याच्या मार्गाची लांबी यामध्ये बदलेल डीएससी.
जर आपण कल्पना केली की वळणाचा प्रारंभ बिंदू TC बरोबर फिरत आहे, वळण सुरू होताना फायटरच्या समान अंतराने आणि अंतरावर त्याच्या सापेक्ष स्थित आहे, तर फायटरला “समांतर दृष्टीकोन वापरून या बिंदूकडे मार्गदर्शन केले जाते. "पद्धत. जर सीसी लांब अंतरावर असेल आधी एका सैनिकाकडून, ज्याच्या तुलनेत मध्यांतर आय आणि अगोदर वळणाचे अंतर डुप्र दुर्लक्ष केले जाऊ शकते, तर सर्वसाधारणपणे "मॅन्युव्हर" पद्धतीचे गुणधर्म "समांतर दृष्टीकोन" पद्धतीच्या गुणधर्मांच्या जवळ आहेत.
लक्ष्यासह नंतरच्या लढाऊ चकमकीला (DSc > 0) तिला फायटरपासून दूर जाण्यास प्रवृत्त करते (DΘ आणि > 0) , आणि फायटरकडे वळल्याने पूर्वीची बैठक होते. म्हणूनच, "समांतर दृष्टीकोन" पद्धतीचा वापर करून मार्गदर्शनाप्रमाणे, लक्ष्याच्या कोर्सच्या युक्तीचा प्रतिकार करण्याचा एक उपाय, वेगवेगळ्या दिशांमधून लढाऊंच्या गटांना एकाच वेळी लक्ष्य करणे असू शकते.
जसजसे टीसीचे अंतर कमी होत जाते, तसतसे "मॅन्युव्हर" पद्धतीचे गुणधर्म आणि "समांतर दृष्टीकोन" पद्धतीच्या गुणधर्मांमधील फरक अधिकाधिक स्पष्ट होत जातो. CV फिरवण्याच्या वेळी, फायटरला कधीही मोठ्या कोनात वळणे आवश्यक आहे, म्हणजेच त्याचा कोनीय वेग w वाढतो.
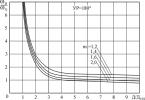
मूल्यात बदल कांडी जेव्हा एक लढाऊ विमान हवाई लक्ष्यासह टक्कर मार्गावर उड्डाण करत असतो (UR = 180°) कोनीय वेगांमधील संबंधाचा आलेख दर्शवितो w आणि / w c श्रेणीतून, लीड टर्न अंतराच्या अंशांमध्ये व्यक्त केले जाते D/Dupr.
लांब पल्ल्यांवर, आलेखावरून पाहिले जाऊ शकते (D/Dupr = 5÷ 10) वृत्ती w आणि / w c एकात्मतेपेक्षा किंचित भिन्न आहे, म्हणजे, लढाऊ विमानाचा कोनीय वेग मॅन्युव्हरिंग लक्ष्याच्या कोनीय वेगापेक्षा थोडा वेगळा आहे. श्रेणीतील घट सह, सुमारे तीन पर्यंत उत्कृष्ट , wi चे मूल्य तीव्रतेने वाढते आणि जेव्हा फायटर वळणाच्या सुरुवातीच्या बिंदूजवळ येतो (D/Dupr = 1)w आणि अनंतापर्यंत वाढते.
अशा प्रकारे, मॅन्युव्हरिंग सीसीवर "मॅन्युव्हर" पद्धत वापरताना, फायटरला गणना केलेल्या त्रिज्यासह वळण सुरू होते त्या ठिकाणी आणणे जवळजवळ अशक्य आहे.

तांदूळ. ७.१०. कोनीय वेगाच्या गुणोत्तराचे अवलंबन w आणि / w c लक्ष्य हाताळताना
च्या संबंधात मार्गदर्शनाच्या पहिल्या टप्प्यावर D/Dupr
पहिल्या टप्प्यावर मार्गदर्शन प्रक्रियेदरम्यान, हवाई लक्ष्य वारंवार युक्ती करू शकते. तर, उदाहरणार्थ, एका बिंदूवर हवाई लक्ष्य 1 मध्ये फायटर चालू करू शकतो, परिणामी बिंदू येतो A1 तो त्याच्या मागील मार्गापासून दूर गेला पाहिजे आणि पूर्वी नियोजित वळणाची दिशा बदलली पाहिजे. परिणामी, मार्गदर्शनाच्या पहिल्या टप्प्यावर लढवय्याचा मार्ग एका सरळ रेषेतून एका जटिल रेषेत वळतो ज्यामध्ये एक वेरियेबल त्रिज्या आणि त्यांच्या दरम्यानचे सरळ विभाग असतात. हे सर्व हवाई युद्धासाठी फ्लाइटच्या अंमलबजावणीला गुंतागुंत करते.
आम्ही आकृती 7.11 वापरून “मॅन्युव्हर” पद्धतीचा वापर करून लढाऊ मार्गदर्शनाच्या दुसऱ्या टप्प्यावर हवाई लक्ष्य युक्तीच्या प्रभावाचा विचार करू:

तांदूळ. ७.११. क्षैतिज विमानात हवाई लक्ष्याच्या युक्तीचा प्रभाव
लढाऊ विमानाच्या मार्गावर "मॅन्युव्हर" पद्धत वापरून मार्गदर्शनाच्या दुसऱ्या टप्प्यावर
आपण असे गृहीत धरू की मार्गदर्शनाच्या दुसऱ्या टप्प्याच्या काही क्षणी फायटर आणि हवाई लक्ष्य अनुक्रमे बिंदूंवर आहेत. ए आणि IN आणि बिंदूवर लक्ष्य पूर्ण करण्यासाठी कॉ फायटर त्रिज्या सह वळण घेतो रो आणि कोनीय वेग कांडी = Vi/ Ro .
जर काही काळासाठी दि हवाई लक्ष्य त्याच्या उड्डाणाची दिशा एका कोनाने बदलेल w c × दि , मग बिंदूवर तिच्याशी भेटणे शक्य होईल सह . एका बिंदूपासून या टप्प्यावर पोहोचण्यासाठी ए फायटरला वेगळ्या त्रिज्याने वळण लावावे लागेल आर . पण आगाऊ दि त्याला याव्यतिरिक्त कोपरा वळवावा लागेल w आणि D × Dt .
अशा प्रकारे, मार्गदर्शनाच्या दुसऱ्या टप्प्यावर हवाई लक्ष्याच्या युक्तीमुळे फायटरच्या वळणाच्या अतिरिक्त कोनीय गतीचा उदय होतो. w आणि D . उर्वरित वळण कोन जितका लहान असेल यू.आर लढाऊ, मोठे मूल्य w आणि D , आणि जसा फायटर वळणाच्या शेवटच्या बिंदूजवळ येतो w आणि D अनंतापर्यंत वाढते.
अशाप्रकारे, "मॅन्युव्हर" पद्धतीचा वापर करून मार्गदर्शनाच्या दुसऱ्या टप्प्यावर युद्धकांना हवेच्या लक्ष्याच्या तुलनेत दिलेल्या स्थितीत आणणे जवळजवळ अशक्य आहे.
या संदर्भात, हवाई लक्ष्य हाताळण्याच्या बाबतीत, दुसऱ्या टप्प्यावर, नियमानुसार, ते “परस्युट” पद्धतीचा वापर करून सैनिकांना मार्गदर्शन करण्यासाठी स्विच करतात.
ट्रॅक केलेल्या लक्ष्याची युक्ती, जी VDU च्या इनपुटवर माहिती अद्यतनित करण्याच्या कालावधीपेक्षा जास्त आहे, डायनॅमिक फिल्टरिंग त्रुटींमध्ये एक पद्धतशीर घटक दिसण्यासाठी स्वतःला प्रकट करते.
उदाहरण म्हणून, एका बिंदूपर्यंत पोहोचणारी लक्ष्य मार्ग तयार करण्याच्या प्रक्रियेचा विचार करूया बी(Fig. 12.15) समान रीतीने आणि सरळ रेषेत हलवले आणि नंतर मोठ्या (1), मध्यम (2) किंवा लहान (3) ओव्हरलोड (डॅश-डॉटेड रेषा) सह युक्ती सुरू केली. फिल्टरिंग n मोजमाप (आकृतीमध्ये वर्तुळासह चिन्हांकित), लक्ष्याचे वर्तमान निर्देशांक (डॅश रेषा) आणि एक्सट्रापोलेटेड कोऑर्डिनेट्स ( n+1)वे पुनरावलोकन (त्रिकोण).
| ए |
| बी |
आकृतीवरून पाहिले जाऊ शकते, युक्ती सुरू झाल्यानंतर, ग्राहकांना जारी केलेल्या लक्ष्याच्या वर्तमान निर्देशांकांमध्ये डायनॅमिक त्रुटी असेल, ज्याची परिमाण जास्त असेल, युक्ती दरम्यान लक्ष्याचा ओव्हरलोड जास्त असेल आणि जागा पाहण्याचा कालावधी.
या परिस्थितीत आपोआप लक्ष्याचा मागोवा घेण्यासाठी, प्रथम, युक्ती शोधणे (ओळखणे) आवश्यक आहे आणि दुसरे म्हणजे, रेक्टलाइनियर आणि एकसमान लक्ष्य हालचालीची गृहितक सोडून देऊन, युक्तीचे मापदंड निर्धारित करणे आणि, या आधारावर, वापरणे आवश्यक आहे. लक्ष्य हालचालीची एक नवीन गृहीतक.
लक्ष्य निर्देशांकांच्या स्वतंत्र मापनांच्या परिणामांवर आधारित युक्ती शोधण्यासाठी अनेक ज्ञात पद्धती आहेत:
1. रेक्टिलीनियर एकसमान गतीच्या गृहीतकेनुसार फिल्टरिंग थांबवण्याचे कारण विशिष्ट स्थिर मूल्याच्या अवशिष्ट मॉड्यूलसचे जास्त असू शकते. या प्रकरणात, प्राप्त केल्यानंतर फिल्टरिंग सुरू ठेवण्यासाठी आवश्यक अट nवा मार्क खालील फॉर्ममध्ये सादर केला जाऊ शकतो:
 ;
;  (1)
(1)
कुठे: Δ पी, Δ डी- स्थिरांक जे विसंगतीचे अनुज्ञेय मूल्य निर्धारित करतात आणि रडार पुनरावलोकन कालावधी आणि युक्ती दरम्यान लक्ष्य ओव्हरलोडचे स्वीकारलेले मूल्य यावर अवलंबून असतात;
P n, D n- nव्या सर्वेक्षणात मोजलेली बेअरिंग आणि श्रेणी मूल्ये;
, - nव्या मापनाच्या वेळी बेअरिंग आणि रेंज व्हॅल्यू एक्स्ट्रापोलेट केली जातात.
2. आयताकृती समन्वय प्रणालीमध्ये ट्रॅकिंग ट्रॅजेक्टोरीजच्या स्थितीत क्षैतिज विमानात युक्ती शोधण्याच्या गुणवत्तेसाठी उच्च आवश्यकतांसह, विसंगतीचे अनुज्ञेय मूल्य प्रत्येक पुनरावलोकनात निर्धारित केले जाते आणि खालीलप्रमाणे समस्या सोडविली जाते:
अ) प्रत्येक समन्वय मापनाच्या परिणामांवर आधारित, एक्स्ट्रापोलेट केलेल्या आणि मोजलेल्या समन्वय मूल्यांचे अवशिष्ट मॉड्यूल मोजले जातात
 ;
; 
 ;
;
b) स्वतंत्र मोजमाप त्रुटींची भिन्नता मोजली जाते
जेथे σ डी, σ पी- श्रेणी आणि बेअरिंगच्या स्वतंत्र मापनाच्या रूट मीन स्क्वेअर त्रुटी;
c) एक्स्ट्रापोलेशन त्रुटींच्या भिन्नतेची गणना केली जाते
 ,
,

d) समन्वय मोजमाप आणि एक्स्ट्रापोलेशनच्या एकूण त्रुटीचे अंतर मोजले जाते
| (5) |
e) मूल्यांची तुलना केली जाते dआणि  , युक्तीच्या खोट्या शोधाची स्वीकार्य संभाव्यता सुनिश्चित करण्याच्या कारणांसाठी गुणांक कोठे निवडला आहे.
, युक्तीच्या खोट्या शोधाची स्वीकार्य संभाव्यता सुनिश्चित करण्याच्या कारणांसाठी गुणांक कोठे निवडला आहे.
तुलना केल्यास असे दिसून येते d>  , नंतर "युक्ती साठी वाट पाहत" निर्णय घेतला जातो. जर असमानता दुसऱ्यांदा समाधानी झाली असेल, तर “मॅन्युव्हर” निर्णय घेतला जातो आणि वापरलेल्या गृहीतकानुसार प्रक्षेपण पॅरामीटर्सचे फिल्टरिंग थांबवले जाते.
, नंतर "युक्ती साठी वाट पाहत" निर्णय घेतला जातो. जर असमानता दुसऱ्यांदा समाधानी झाली असेल, तर “मॅन्युव्हर” निर्णय घेतला जातो आणि वापरलेल्या गृहीतकानुसार प्रक्षेपण पॅरामीटर्सचे फिल्टरिंग थांबवले जाते.
3. युक्ती शोधण्याचा निकष निवडण्यासाठी आणखी एक दृष्टीकोन देखील वापरला जातो. प्रत्येक सर्वेक्षणात, मागील आणि वर्तमान सर्वेक्षणांमधील ध्रुवीय समन्वय अवशेषांचे स्वयं-संबंध कार्य मोजले जाते.
 ,
,

जर कोणतीही युक्ती नसेल, तर Δ डी एनआणि Δ पी एनपुनरावलोकनापासून पुनरावलोकनापर्यंत स्वतंत्र आणि अवशेषांची स्वयंसंबंध कार्ये लहान किंवा अगदी शून्य आहेत. युक्तीच्या उपस्थितीमुळे अवशेषांच्या उत्पादनाची गणितीय अपेक्षा लक्षणीय वाढते. एक युक्ती सुरू करण्याचा निर्णय घेतला जातो जेव्हा ऑटोकॉरिलेशन फंक्शन्स विशिष्ट थ्रेशोल्ड पातळी ओलांडतात.
दुसरा अभ्यास प्रश्न: युक्ती दरम्यान लक्ष्य ट्रॅकिंग.
सर्वात सोप्या बाबतीत, जेव्हा लक्ष्याच्या (n+1)-व्या विकिरणानंतर दोन बिंदूंवर युक्ती सुरू झाल्याचे आढळून येते - n-व्या सर्वेक्षणातील अंदाजे निर्देशांक (ओपन सर्कल) आणि मोजलेले निर्देशांक ( n+1)वे सर्वेक्षण (घन वर्तुळ) लक्ष्याच्या वेग वेक्टरची गणना करते, ज्याचा वापर वर्तमान निर्देशांक आणि एक्सट्रापोलेटेड कोऑर्डिनेट्सची गणना करण्यासाठी केला जाऊ शकतो ( n+2)वे पुनरावलोकन. त्यानंतर, वर्तमान आणि मागील सर्वेक्षणांमध्ये मोजलेले लक्ष्य निर्देशांक लक्ष्य मार्ग तयार करण्यासाठी आणि एक्स्ट्रापोलेट केलेल्या निर्देशांकांची गणना करण्यासाठी वापरले जातात. या अल्गोरिदमचा वापर करून चालणाऱ्या फिल्टरला दोन-बिंदू एक्स्ट्रापोलेटर म्हणतात.
असा एक्स्ट्रापोलेटर वापरताना, लक्ष्याच्या खऱ्या स्थितीपासून एक्स्ट्रापोलेटेड कोऑर्डिनेट्सचे विचलन ( एल १, एल २, एल ३) दीर्घ पाहण्याच्या कालावधीसह आणि युक्ती दरम्यान मोठ्या लक्ष्य ओव्हरलोड्स लक्षणीय असू शकतात; या प्रकरणात, लक्ष्याचे वर्तमान निर्देशांक मोठ्या त्रुटी असलेल्या ग्राहकांना दिले जातील. मोठ्या एक्स्ट्रापोलेशन त्रुटींमुळे पुढील लक्ष्य चिन्ह स्वयं-ट्रॅकिंग स्ट्रोबच्या सीमेबाहेर असू शकते. स्ट्रोबमध्ये सहसा खोट्या खुणा असल्याने, त्यापैकी एक निवडला जाईल आणि चुकीच्या दिशेने मार्गक्रमण चालू ठेवण्यासाठी वापरला जाईल आणि खऱ्या लक्ष्याचा ऑटो ट्रॅकिंग व्यत्यय येईल.
सतत ओव्हरलोडसह दीर्घकालीन युक्ती दरम्यान, प्रक्षेपणाच्या वक्र विभागावर प्राप्त झालेल्या पहिल्या तीन गुणांचा वापर करून लक्ष्याच्या प्रवेगाचे आयताकृती घटक निर्धारित करून आणि प्रवेग फिल्टर करून लक्ष्य ट्रॅकिंगची अचूकता वाढवता येते. वापरून ही समस्या सोडवली जाते "α-β-γ"- फिल्टर, निर्देशांकांचा अंदाज घेण्यासाठी आवर्ती अल्गोरिदम आणि त्यांच्या बदलाचा दर सारखाच राहतो "α-β"- फिल्टर, आणि लक्ष्य प्रवेगचा अंदाज, उदाहरणार्थ, समन्वयाने एक्समध्ये मार्क मिळाल्यावर n-व्या पुनरावलोकनाची गणना सूत्राद्वारे केली जाते
वापरा: रडार माहिती शोधण्यासाठी आणि त्यावर प्रक्रिया करण्यासाठी स्वयंचलित डिजिटल सिस्टममध्ये. आविष्काराचे सार: हवाई लक्ष्याच्या निर्देशांकांच्या स्वतंत्र रडार मापनात, युक्तीच्या संचयित संभाव्यतेवर अवलंबून फिल्टर नफ्यांमध्ये बदल करून लक्ष्य मार्गाचे वर्तमान मापदंड गुळगुळीत करणे. नवीन काय आहे ते म्हणजे ज्या क्षणी लक्ष्य संभाव्य मॅनिव्हर झोनमध्ये प्रवेश करते त्या क्षणी फिल्टर गेन गुणांक स्थापित करणे, युक्तीच्या संचयित संभाव्यतेवर अवलंबून असते. लक्ष्य युक्तीमुळे ट्रॅकिंग त्रुटीच्या डायनॅमिक घटकाची भरपाई करून ट्रॅकिंग अचूकता वाढवणे प्राप्त केले जाते. 3 आजारी.
शोध रडारशी संबंधित आहे आणि रडार माहिती शोधण्यासाठी आणि त्यावर प्रक्रिया करण्यासाठी स्वयंचलित डिजिटल सिस्टममध्ये वापरला जाऊ शकतो. निरीक्षणाच्या कालावधीत लक्ष्य साध्य होईल असे गृहीत धरून त्याच्या प्रक्षेपण मापदंडांचे (समन्वय आणि बदलाचे दर) समन्वयांचे स्वतंत्र रडार मोजमाप आणि वर्तमान मूल्यांकन (गुळगुळीत आणि एक्स्ट्रापोलेशन) यावर आधारित, युक्तीने चालणाऱ्या हवाई लक्ष्याचा मागोवा घेण्यासाठी ज्ञात पद्धती आणि उपकरणे आहेत. उच्च तीव्रतेची केवळ एक मुद्दाम युक्ती करा, जेव्हा युक्ती आढळली तेव्हा, आवर्ती स्मूथिंग फिल्टरची मेमरी कमी केली जाते. या प्रकरणात, जरी डायनॅमिक स्मूथिंग एरर, मॅन्युव्हरिंग टार्गेटच्या खऱ्या प्रक्षेपकाचे वर्णन करणाऱ्या बहुपदीच्या डिग्रीबद्दलच्या गृहीतकामधील विसंगतीमुळे आणि त्याच्या हालचालीच्या रेषीय गृहीतकाची भरपाई केली गेली असली तरी, स्मूथिंग त्रुटीचा यादृच्छिक घटक प्राप्त होतो. निर्देशांक मापनाच्या दिलेल्या अचूकतेसाठी कमाल मूल्य आणि एकूण त्रुटी वाढते. युक्तीच्या हवाई लक्ष्याचा मागोवा घेण्याच्या ज्ञात पद्धतींपैकी, तांत्रिक सार आणि साध्य केलेल्या परिणामाच्या दृष्टीने प्रस्तावित पद्धतीच्या सर्वात जवळची पद्धत म्हणजे वर्तमान मूल्यांच्या विचलनाच्या विशालतेच्या विश्लेषणाच्या आधारे युक्ती ओळखली जाते. त्यांच्या मोजलेल्या मूल्यांमधून ट्रॅक केलेल्या प्रक्षेपकाच्या पॅरामीटर्सची आणि या विचलनाची थ्रेशोल्ड मूल्याशी तुलना केल्यावर, जेव्हा युक्ती ओळखली जाते, तेव्हा ते एकतेच्या समान फिल्टर गेन गुणांकांसह प्रक्षेपण पॅरामीटर्स गुळगुळीत केले जाते कारण जेव्हा प्रक्षेपण पॅरामीटर्स गुळगुळीत होतात; केवळ युक्तीच्या उपस्थितीची वस्तुस्थिती लक्षात घेतली जाते, या पद्धतीसह गुळगुळीत त्रुटी मोठ्या प्रमाणात राहतात. आविष्काराचा उद्देश कमी-उड्डाण करणाऱ्या हवाई लक्ष्याचा मागोवा घेण्याची अचूकता सुधारणे हा आहे. हे या वस्तुस्थितीमुळे साध्य झाले आहे की कमी-उड्डाण करणाऱ्या हवेच्या लक्ष्याचा मागोवा घेण्याच्या पद्धतीमध्ये, निर्देशांकांच्या स्वतंत्र रडार मापनावर आधारित आणि फिल्टर वापरून लक्ष्याच्या प्रक्षेपणाचे मापदंड गुळगुळीत करणे, फिल्टर नफ्यासह सरळ रेषेच्या हालचालींच्या विभागांमध्ये. लक्ष्य स्थितीच्या आवाजाद्वारे, जे बेअरिंगच्या बदलाच्या दरानुसार, बेअरिंग संबंधांवरून निर्धारित केले जाते आणि प्रक्षेपण विभागात प्रवेश करण्याच्या क्षणी, लक्ष्य युक्ती विभागातील फिल्टर लाभ गुणांकातील बदल, ज्यामध्ये, प्रक्षेपण वैशिष्ट्यांबद्दलच्या प्राथमिक माहितीनुसार, युक्ती चालवणे शक्य आहे, लक्ष्य बेअरिंग सिग्नल फिल्टर गेन घटकांसह गुळगुळीत केले जाते मॅन्युव्हरसह लक्ष्याच्या संचित संभाव्यतेनुसार सेट केले जाते: P n = 1/(N-n+1) , जेथे N ही संभाव्य युक्तीच्या क्षेत्रातील मोजमापांची संख्या आहे आणि n ही संभाव्य युक्तीच्या क्षेत्रामध्ये गुळगुळीत चक्राची संख्या आहे, बेअरिंग (p n) + -1 (1) च्या गुणोत्तरांवरून. बेअरिंगच्या बदलाच्या दरासाठी (P n) - , जेथे a + 2 (2) r  (३) बेअरिंग मापन त्रुटींचा फरक कुठे आहे; a म्हणजे मॅन्युव्हर दरम्यान बेअरिंगच्या बाजूने लक्ष्याचा जास्तीत जास्त प्रवेग; युक्ती अचूक शोधण्याची संभाव्यता; T हा रडार पुनरावलोकन कालावधी आहे, आणि ज्या क्षणी लक्ष्य युक्ती शोधली जाते, बेअरिंग सिग्नल एकदा फिल्टर गेन गुणांकांसह गुळगुळीत केला जातो आणि , संबंधांपासून (1) आणि (2) रिलेशन r पासून मूल्य r सह (4) जेथे R युक्तीच्या खोट्या शोधाची संभाव्यता आहे आणि त्यानंतरच्या स्मूथिंग सायकल्समध्ये, लक्ष्य प्रक्षेपणाचे पॅरामीटर्स फिल्टर गेन गुणांकाने गुळगुळीत केले जातात, जे संबंधांवरून निर्धारित केले जातात
(३) बेअरिंग मापन त्रुटींचा फरक कुठे आहे; a म्हणजे मॅन्युव्हर दरम्यान बेअरिंगच्या बाजूने लक्ष्याचा जास्तीत जास्त प्रवेग; युक्ती अचूक शोधण्याची संभाव्यता; T हा रडार पुनरावलोकन कालावधी आहे, आणि ज्या क्षणी लक्ष्य युक्ती शोधली जाते, बेअरिंग सिग्नल एकदा फिल्टर गेन गुणांकांसह गुळगुळीत केला जातो आणि , संबंधांपासून (1) आणि (2) रिलेशन r पासून मूल्य r सह (4) जेथे R युक्तीच्या खोट्या शोधाची संभाव्यता आहे आणि त्यानंतरच्या स्मूथिंग सायकल्समध्ये, लक्ष्य प्रक्षेपणाचे पॅरामीटर्स फिल्टर गेन गुणांकाने गुळगुळीत केले जातात, जे संबंधांवरून निर्धारित केले जातात
कुठे
(n) (n)
n = int 
लक्ष्य युक्ती शोधण्याच्या क्षणी m आणि m हे फिल्टर नफा आहेत. कमी-उड्डाण करणाऱ्या हवाई लक्ष्याचा मागोवा घेण्यासाठी ज्ञात पद्धतींमध्ये प्रस्तावित पद्धतीला प्रोटोटाइपपासून वेगळे करणाऱ्या वैशिष्ट्यांसारखी वैशिष्ट्ये नाहीत. कृतींच्या नव्याने सादर केलेल्या क्रमाची उपस्थिती हवाई लक्ष्याचा मागोवा घेण्याच्या मार्गाविषयीच्या प्राथमिक माहितीमुळे ट्रॅकिंगची अचूकता वाढवणे शक्य करते आणि त्यामुळे लक्ष्य युक्ती चुकल्यावर उद्भवणाऱ्या ट्रॅकिंग त्रुटी कमी करणे शक्य होते. परिणामी, दावा केलेली पद्धत "नॉव्हेल्टी" आणि "इन्व्हेंटिव्ह पायरी" चे निकष पूर्ण करते. नवीन सादर केलेल्या वैशिष्ट्यांसह प्रस्तावित पद्धतीचा सकारात्मक परिणाम साधण्याची शक्यता डायनॅमिक बेअरिंग एक्स्ट्रापोलेशन एररच्या प्रभावाच्या भरपाईमुळे आहे, मॅन्युव्हर डिटेक्टरद्वारे चुकलेल्या लक्ष्य युक्तीने निर्धारित केले जाते, त्यानुसार फिल्टर नफा बदलून युक्तीची संचित संभाव्यता. अंजीर मध्ये. 1 लक्ष्य युक्तीचा एक आकृती दर्शवितो; अंजीर मध्ये प्रस्तावित पद्धतीची प्रभावीता दर्शविणारे 2 आलेख; अंजीर मध्ये आकृती 3 प्रस्तावित पद्धतीच्या अंमलबजावणीसाठी डिव्हाइसचे इलेक्ट्रिकल ब्लॉक आकृती दर्शविते. कोणतेही कमी-उड्डाण करणारे हाय-स्पीड एअर टार्गेट जे अचानक दिसले आणि आढळले, उदाहरणार्थ, रडार वाहक जहाजावर, आक्रमण करणारे म्हणून वर्गीकृत केले जाईल, असे मानणे वाजवी आहे की हे लक्ष्य बहुधा जहाजाच्या दिशेने वळेल, एक कामगिरी करत. होमिंग युक्ती. दुस-या शब्दात, एका विशिष्ट बिंदूवर जहाजाला आदळण्यासाठी, कमी-उड्डाण करणाऱ्या हाय-स्पीड एअर टार्गेटने युक्ती केली पाहिजे, परिणामी जहाजाच्या सापेक्ष लक्ष्याचे हेडिंग पॅरामीटर शून्याच्या बरोबरीचे असणे आवश्यक आहे. या संदर्भात, अनिवार्य लक्ष्य युक्तीची धारणा मूलभूतपणे न्याय्य आहे. भविष्यात, आम्ही हवाई लक्ष्य म्हणून होमिंग मॅन्युव्हर करत असलेल्या अँटी-शिप क्रूझ क्षेपणास्त्राचा (ASCM) विचार करू. प्रक्षेपणाच्या अंतिम विभागात जहाजविरोधी क्षेपणास्त्र प्रणालीच्या प्रक्षेपण वैशिष्ट्यांच्या वापरावर ही पद्धत आधारित आहे. 30 किमीपेक्षा कमी अंतरावर असलेल्या जहाजविरोधी क्षेपणास्त्राच्या प्रक्षेपणात (चित्र 1 पहा) प्रक्षेपणाच्या तीन वैशिष्ट्यपूर्ण विभागांचा समावेश आहे: जहाजविरोधी क्षेपणास्त्राच्या होमिंग मॅन्युव्हरला सुरुवात होण्यापूर्वी एक सरळ विभाग; संभाव्य होमिंग मॅन्युव्हरचे क्षेत्र; होमिंग मॅन्युव्हर पूर्ण झाल्यानंतर प्रक्षेपणाचा सरळ भाग. हे ज्ञात आहे की जहाजविरोधी क्षेपणास्त्रांचे होमिंग मॅन्युव्हर, उदाहरणार्थ, "हारपून" प्रकारचे, लक्ष्य जहाजापासून 5, 3, 20, 2 किमी अंतरावर केले जाते. असे गृहीत धरले जाऊ शकते की 20.2 किमी पेक्षा जास्त अंतरावर, युक्तीची संभाव्यता शून्याच्या जवळ आहे आणि फिल्टरचे फायदे मर्यादित करण्याची आवश्यकता केवळ लक्ष्य स्थितीच्या आवाजाच्या उपस्थितीमुळे आहे. या विशिष्ट सामरिक परिस्थितीत शत्रूद्वारे वापरल्या जाणाऱ्या जहाजविरोधी क्षेपणास्त्रे डागण्याच्या पद्धतीबद्दल प्राथमिक डेटा नसताना, जहाजविरोधी क्षेपणास्त्राच्या कोणत्याही वेळी होमिंग युक्ती सुरू होण्याची तितकीच शक्यता आहे असे मानण्याचे कारण आहे. जहाज D किमान 5.3 किमी आणि D कमाल 20.2 किमी अंतराच्या मर्यादेत आहे. क्षेपणास्त्र मध्ये निर्दिष्ट श्रेणी मध्यांतर कव्हर करते
t 1 = 50 s जेथे V 290 m/s PCR उड्डाण गती. परिणामी, असे गृहित धरले जाऊ शकते की जहाजविरोधी क्षेपणास्त्र जहाजापासून काही अंतरावर आहे, ज्यामुळे त्याला होमिंग मॅन्युव्हर सुरू करता येईल, त्याच्या निर्देशांकांचे N N +1 + 1 मोजमाप केले जाईल. कोणत्याही आंतर-दृश्य अंतराने समान संभाव्यतेसह युक्ती सुरू होऊ शकत असल्याने, nth (n 1, 2,) मध्यांतराने युक्ती चालवण्याच्या प्रारंभाचा समावेश असलेल्या इव्हेंटची संभाव्यता ही एक प्रायोरी आहे
पी
जर युक्तीची सुरुवात (n-1)व्या समन्वय परिमाणात आढळली नाही, तर nव्या परिमाणातील युक्तीची संचित संभाव्यता संबंधानुसार निर्धारित केली जाते.
पी =
संचित संभाव्यतेवर युक्ती चालवताना जहाजविरोधी क्षेपणास्त्राच्या प्रवेग फैलावचे अवलंबित्व खालीलप्रमाणे व्यक्त केले जाऊ शकते:
2 a = (1+4P n)(1-P ohm) (5) जेथे a हे युद्धाभ्यास (3.5g) दरम्यान बेअरिंगच्या बाजूने जहाजविरोधी क्षेपणास्त्र प्रणालीचे कमाल प्रवेग आहे;
युक्ती अचूक शोधण्याची संभाव्यता. PCR (a) च्या प्रवेगाचे फैलाव जाणून घेणे आणि हे देखील गृहीत धरून की बेअरिंग मापन त्रुटींची मूल्ये ज्ञात आहेत, वर्तमान गुणोत्तरांसाठी इष्टतम असलेल्या फिल्टर गेन गुणांकांच्या मूल्यांची गणना करणे शक्य आहे. समन्वय मोजमाप त्रुटींचे फैलाव, बेअरिंगमध्ये अडथळा आणणारे प्रवेग आणि रडार पाहण्याचा कालावधी: बेअरिंगद्वारे
(P n) (6) बेअरिंगच्या बदलाच्या दराने (P n) जेथे o 2 हा बेअरिंगच्या अंदाजातील त्रुटींचा फरक आहे;
पत्करणे मापन त्रुटी भिन्नता;
R हा बेअरिंग एस्टिमेशन एरर आणि त्यातील बदलाचा दर यांच्यातील सहसंबंध गुणांक आहे. o आणि R o ची मूल्ये खालील संबंधांद्वारे निर्धारित केली जातात
2 o = + -1
R o = (7)
रिलेशन (7) संबंध (2) आणि (3) मध्ये बदलून, आम्ही बेअरिंग एस्टिमेशन एरर आणि बेअरिंग एस्टिमेशन एररचा सहसंबंध गुणांक आणि त्यातील बदलाचा दर मिळवतो आणि, एक्स्प्रेशन (6) मध्ये बदलून, आम्ही प्राप्त करतो संबंधानुसार निर्धारित नफा फिल्टर (1). हे स्पष्ट आहे की प्रत्येक पुनरावलोकनाबरोबर pcr जसजसा जवळ येतो तसतसे युक्तीची संचित संभाव्यता वाढते, ज्यामुळे प्रवेग फैलाव pCR मध्ये वाढ होते आणि त्यानुसार, फिल्टर नफ्यात वाढ होते आणि . जेव्हा युक्ती शोधली जाते, तेव्हा युक्तीची संचित संभाव्यता "एक" मूल्य नियुक्त केली जाते आणि पीसीआरचे प्रवेग फैलाव खालीलप्रमाणे मोजले जाते:
= a 2 (1-P स्क्रॅप) (8) जेथे P स्क्रॅप ही युक्ती खोटे शोधण्याची संभाव्यता आहे. या प्रकरणात, r ची गणना रिलेशन (4) वरून केली जाते, फिल्टर नफा त्यांचे कमाल मूल्य प्राप्त करतात. पीसीआर मॅन्युव्हरचा कमी कालावधी (1.3 से) लक्षात घेता, वाढीव लाभ घटकांसह एक स्मूथिंग पुरेसे आहे (सिम्युलेशन मॉडेलिंगच्या परिणामांद्वारे याची पुष्टी होते). युक्तीच्या संभाव्यतेचे मूल्यांकन करण्याची प्रक्रिया 20.2 ते 5.3 किमीच्या श्रेणीमध्ये केली जाते. युक्ती शोधल्यानंतर, बेअरिंग फिल्टर नफा केवळ लक्ष्य स्थितीच्या आवाजाद्वारे निर्धारित केलेली मूल्ये नियुक्त केली जातात आणि संपूर्ण ट्रॅकिंग वेळेत त्यांची मूल्ये स्थिर असतात आणि त्यांची मूल्ये लक्ष्य राज्य आवाजानुसार निवडली जातात. अंजीर मध्ये. आकृती 3 प्रस्तावित पध्दतीची अंमलबजावणी करणाऱ्या मॅन्युव्हरिंग एअर टार्गेटच्या स्वयंचलित ट्रॅकिंगसाठी एक उपकरण दर्शविते. यात मोजलेले समन्वय सेन्सर 1, स्मूथिंग ब्लॉक 2, एक्स्ट्रापोलेशन ब्लॉक 3, पहिला विलंब ब्लॉक 4, मेमरी ब्लॉक 5, मॅन्युव्हर डिटेक्शन ब्लॉक 6, तुलना ब्लॉक 7, दुसरा विलंब ब्लॉक 8, ब्लॉक 9 आहे. फिल्टर नफ्यांची गणना. मॅन्युव्हरिंग एअर टार्गेटच्या स्वयंचलित ट्रॅकिंगसाठी डिव्हाइसमध्ये मालिका-कनेक्टेड सेन्सर 1 मोजलेले निर्देशांक असतात, ज्याचे इनपुट डिव्हाइसचे इनपुट असते, सेन्सर 1 मोजलेल्या निर्देशांकाचे आउटपुट स्मूथिंग ब्लॉकच्या 1ल्या इनपुटशी कनेक्ट केलेले असते. 2 आणि मॅन्युव्हर डिटेक्शन ब्लॉक 6 च्या 1ल्या इनपुटला, स्मूथिंग ब्लॉक 2 चे आउटपुट एक्स्ट्रापोलेशन ब्लॉक 3 च्या इनपुटशी जोडलेले आहे, एक्स्ट्रापोलेशन ब्लॉक 3 चे 1 ला आउटपुट तुलना ब्लॉक 7 च्या इनपुटशी जोडलेले आहे आणि त्याद्वारे विलंब ब्लॉक 4 ते स्मूथिंग ब्लॉक 2 च्या 4थ्या इनपुटला आणि मॅन्युव्हर डिटेक्शन ब्लॉक 6 च्या 2ऱ्या इनपुटला, ब्लॉक 3 एक्सट्रापोलेशनचे 2रे आउटपुट हे उपकरणाचे आउटपुट आहे, मॅन्युव्हर डिटेक्शन ब्लॉक 6 चे आउटपुट कनेक्ट केलेले आहे फिल्टर गेन कॅल्क्युलेशन ब्लॉक 9 चा 2रा इनपुट आणि विलंब ब्लॉक 8 द्वारे मेमरी ब्लॉक 5 च्या 2ऱ्या इनपुटमध्ये आणि फिल्टर गेन कॅल्क्युलेशन ब्लॉक 9 च्या 3ऱ्या इनपुटला, ब्लॉक तुलना 7 चे आउटपुट 1 ला जोडलेले आहे फिल्टर गेन्सची गणना करण्यासाठी मेमरी ब्लॉक 5 चे इनपुट आणि ब्लॉक 9 चे 1ले इनपुट, मेमरी ब्लॉक 5 चे आउटपुट स्मूथिंग ब्लॉक 2 च्या 2ऱ्या इनपुटशी कनेक्ट केलेले आहे, फिल्टर नफ्यांची गणना करण्यासाठी ब्लॉक 9 चे आउटपुट 3ऱ्या इनपुट ब्लॉकशी कनेक्ट केलेले आहे 2 गुळगुळीत करणे. डिव्हाइस खालीलप्रमाणे कार्य करते. प्राप्त करणाऱ्या उपकरणाच्या आउटपुटमधून ट्रॅक केलेल्या लक्ष्याचे निर्देशांक मोजण्याच्या वर्तमान n व्या चक्राचा व्हिडिओ सिग्नल ट्रॅकिंग डिव्हाइसच्या इनपुटला आणि त्यानुसार, मोजलेल्या निर्देशांकांपैकी 1 सेन्सर करण्यासाठी प्रदान केला जातो. मोजलेला समन्वय सेन्सर 1 व्हिडिओ सिग्नलला ॲनालॉगमधून डिजिटल स्वरूपात रूपांतरित करतो, उपयुक्त सिग्नल निवडतो आणि समन्वय मूल्ये मोजतो: बेअरिंग (П n) आणि श्रेणी (D n). मोजलेले निर्देशांक सेन्सर 1 स्वयंचलित एअर टार्गेट डिटेक्टरच्या ज्ञात योजनांनुसार लागू केले जाऊ शकते. सिग्नल कोडच्या स्वरूपात मोजलेल्या लक्ष्य निर्देशांकांची मूल्ये (P n आणि D n) स्मूथिंग ब्लॉक 2 च्या 1 ला इनपुटला पुरवली जातात, जे खालीलप्रमाणे समन्वय प्रक्रिया ऑपरेशन लागू करते: जेव्हा n 1, वर्तमान अंदाज लक्ष्य निर्देशांक आहे
= M n, जेथे M n = П n, n 2 साठी D, लक्ष्य प्रक्षेपक पॅरामीटर्सचा वर्तमान अंदाज समान आहे
= M n , V= (M n-1 -M n)/T o जेथे T हा रडार पुनरावलोकन कालावधी आहे; n>2 साठी, लक्ष्य प्रक्षेपण पॅरामीटर्सचा वर्तमान अंदाज समान आहे
= +(M)
= +(M)/T कोठे आणि गुणांक वजन करतात (फिल्टर गेन);
आणि निर्देशांकांचे अंदाज आणि त्यांच्या बदलाचा दर एका सर्वेक्षणात वाढवला जातो. ब्लॉक 2 वरून, निर्देशांकांची गुळगुळीत मूल्ये आणि त्यांच्या बदलाचा दर एक्सट्रापोलेशन ब्लॉक 3 च्या इनपुटला पुरवला जातो. एक्स्ट्रापोलेशन ब्लॉक 3 दिलेल्या वेळेसाठी एक्सट्रापोलेशन केलेल्या ट्रॅजेक्टोरी पॅरामीटर्सचा अंदाज तयार करतो:
= +VT e; = जेथे T e हे एक्स्ट्रापोलेशन वेळेच्या अंतराचे निर्दिष्ट मूल्य आहे. या उपकरणात T e T o, T e T tsu. या प्रकरणात, 1ल्या आउटपुटमधील टाइम-एक्स्ट्रापोलेटेड कोऑर्डिनेट व्हॅल्यूज विलंब ब्लॉक 4 द्वारे स्मूथिंग ब्लॉक 2 च्या 4थ्या इनपुटमध्ये पुरवले जातात, जिथे ते पुढील चक्रातील प्रक्षेपक पॅरामीटर्सची गणना करण्यासाठी वापरले जातात आणि मॅन्युव्हर डिटेक्शन ब्लॉक 6 चा 2रा इनपुट, जिथे ते मोजमाप केलेल्या निर्देशांक सेन्सर 1 वरून मॅनिव्हर डिटेक्शन युनिट 6 च्या 1 ला इनपुटला पुरवलेल्या मोजलेल्या बेअरिंग व्हॅल्यूजमधून वजा केले जातात आणि परिणामी फरक खालीलप्रमाणे थ्रेशोल्डशी तुलना केली जाते:
P n ->
थ्रेशोल्ड मूल्ये युक्तीच्या खोट्या ओळखीच्या आवश्यक संभाव्यतेवर आधारित निवडली जातात. त्याच आउटपुटमधून, एक्स्ट्रापोलेटेड कोऑर्डिनेट्स तुलना ब्लॉक 7 च्या इनपुटवर पाठवले जातात, जिथे एक्स्ट्रापोलेटेड श्रेणीच्या मूल्यांची 5.3 ते 20.2 किमी पर्यंतच्या संभाव्य युक्तीच्या श्रेणीशी तुलना केली जाते. एक्स्ट्रापोलेशन ब्लॉक 3 (डिव्हाइस आउटपुट) च्या 2 रा आउटपुटला T e वेळेनुसार एक्स्ट्रापोलेशन केलेली मूल्ये पुरवली जातात आणि ग्राहकांना लक्ष्य पदनाम डेटा तयार करण्यासाठी आणि जारी करण्यासाठी वापरली जातात. तुलना ब्लॉक 7 मध्ये, एक्स्ट्रापोलेटेड रेंजचे मूल्य संभाव्य मूल्यांच्या श्रेणीमध्ये असल्यास, एक तार्किक एक सिग्नल तयार केला जातो, जे प्रतिबंधित करताना, तुलना ब्लॉक 7 च्या आउटपुटमधून मेमरी ब्लॉक 5 च्या 1 ला इनपुटला पुरवले जाते. स्मूथिंग ब्लॉक 2 ला फिल्टर गेन्स जारी करणे, त्याच वेळी फिल्टर गेन्सची गणना करण्यासाठी ब्लॉक 9 च्या 1ल्या इनपुटवर समान सिग्नल येतो आणि स्मूथिंगसाठी ब्लॉक 2 करण्यासाठी नफ्यांचे आउटपुट सुरू करतो. जर एक्स्ट्रापोलेटेड श्रेणीची मूल्ये संभाव्य युक्तीच्या मर्यादेच्या अंतराच्या आत नसतील, तर तार्किक शून्य सिग्नल व्युत्पन्न केला जाईल, फिल्टर नफ्यांची गणना करण्यासाठी ब्लॉक 9 मधून लाभ घटक जारी करण्यास प्रतिबंधित करेल आणि त्यातून लाभ घटक जारी करण्यास प्रारंभ करेल. मेमरी ब्लॉक 5. मेमरी ब्लॉक 5 स्टोअर नफा फिल्टर करते, ज्याची मूल्ये लक्ष्य स्थितीच्या आवाजाद्वारे निर्धारित केली जातात. फिल्टर नफ्यांची गणना करण्यासाठी ब्लॉक 9 मध्ये, तार्किक एक सिग्नलच्या आगमनाच्या बाबतीत आणि संबंध (1), (2) आणि (3) नुसार मॅन्युव्हर डिटेक्शन सिग्नलच्या अनुपस्थितीत नफ्याची गणना केली जाते, आणि संबंधांनुसार "मॅन्युव्हर डिटेक्ट" सिग्नलच्या आगमनाचे प्रकरण (1), (2) आणि (4). ब्लॉक 6 मध्ये, "मॅन्युव्हर डिटेक्ट" सिग्नल व्युत्पन्न केला जातो आणि फिल्टर नफ्यांची गणना करण्यासाठी ब्लॉक 9 वर पाठविला जातो, तोच सिग्नल ब्लॉक 8 ला विलंब करण्यासाठी पाठविला जातो आणि एका पुनरावलोकन कालावधीने विलंब होतो, मेमरी ब्लॉक 5 आणि 9 आणि फिल्टरची गणना करण्यासाठी पाठविला जातो. नफा खालील प्रारंभिक डेटासह सिम्युलेशन मॉडेलिंग वापरून प्रस्तावित पद्धतीच्या प्रभावीतेचे मूल्यांकन केले गेले:
हार्पून-प्रकारच्या जहाजविरोधी क्षेपणास्त्र प्रणालीची प्रक्षेपण श्रेणी 100 किमी आहे;
युक्ती दरम्यान आरसीसी ओव्हरलोड 4 ग्रॅम;
युक्ती कालावधी 4 s;
रडार पुनरावलोकन कालावधी 2s;
युक्ती 13 आणि 14 पुनरावलोकनांदरम्यान सुरू होते. अंजीर मध्ये. आकृती 2 मापन क्रमांकावर प्रति सर्वेक्षण सामान्यीकृत समन्वय एक्स्ट्रापोलेशन त्रुटीचे अवलंबित्व दर्शविते जेथे:
1 प्रस्तावित पद्धत;
2 ज्ञात पद्धत. प्रस्तावित पद्धतीची अंमलबजावणी करताना, समन्वय एक्सट्रापोलेशनची अचूकता दुप्पट होते.
दावा
दिशानिर्देशांच्या वेगळ्या रडार मापनावर आधारित, एक युक्ती हवाई लक्ष्याचा मागोवा घेण्याची पद्धत, लक्ष्य स्थितीच्या आवाजाद्वारे निर्धारित केलेल्या फिल्टर ॲम्प्लिफायर गुणांकांसह सरळ-रेषेतील हालचालींच्या विभागांमध्ये a - - फिल्टर वापरून लक्ष्य प्रक्षेपणाचे मापदंड गुळगुळीत करणे. संबंधांवरून निश्चित केले: पत्करून ![]()
जेथे j हे वर्तमान स्मूथिंग सायकल आहे;
बेअरिंग बदलाच्या वेगाने
आणि टार्गेट मॅन्युव्हर विभागांमध्ये फिल्टर गेन गुणांक बदलणे, ज्यामध्ये प्रक्षेपण विभागात प्रवेश करण्याच्या क्षणी वैशिष्ट्यीकृत आहे, ज्यामध्ये लक्ष्य प्रक्षेपण वैशिष्ट्यांबद्दलच्या प्राथमिक माहितीच्या आधारे युक्ती करणे शक्य आहे, लक्ष्य बेअरिंग सिग्नल फिल्टर गेनसह गुळगुळीत केले जाते. ट्रॅक केलेल्या लक्ष्याच्या युक्तीच्या संचित संभाव्यतेनुसार सेट केलेले गुणांक,
Pn(Nn+1),
जेथे N ही संभाव्य युक्तीच्या क्षेत्रातील मोजमापांची संख्या आहे;
n स्मूथिंग सेक्शनमधील स्मूथिंग सायकलची संख्या बेअरिंग रिलेशनपासून संभाव्य युक्तीच्या विभागात (1)
बेअरिंग बदलाच्या गतीने (2) ![]()
![]()

जेथे 2 बेअरिंग मापन त्रुटींचा फरक आहे;
युक्ती दरम्यान बेअरिंगनुसार लक्ष्याचा जास्तीत जास्त प्रवेग;
पी ओ. m युक्ती अचूक शोधण्याची शक्यता;
रडार पुनरावलोकन कालावधीबद्दल टी,
आणि लक्ष्य युक्ती शोधण्याच्या क्षणी, संबंधांमधील r मूल्यासह (1) आणि (2) मधून फिल्टर लाभलेल्या a आणि b सह बेअरिंग सिग्नल एकदा गुळगुळीत केला जातो 
जेथे P l. ओ. एम मॅन्युव्हरच्या खोट्या शोधाची संभाव्यता, आणि त्यानंतरच्या स्मूथिंग सायकलमध्ये ट्रॅजेक्टोरी पॅरामीटर्स फिल्टर गेन गुणांकाने गुळगुळीत केले जातात, ज्याची मूल्ये वर्तमान स्मूथिंग सायकलच्या त्यानंतरच्या संख्येशी संबंधित असतात, जी संबंधांवरून निर्धारित केली जातात. 


![]()

जेथे i 0, 1, 2, युक्ती शोधल्यानंतर सायकल क्रमांक;
लक्ष्य राज्य आवाजामुळे स्थापित फिल्टर मेमरी;
लक्ष्य युक्तीच्या क्षणी फिल्टरचा लाभ m आणि m.
रडार माहितीच्या प्रारंभिक प्रक्रियेच्या परिणामी, ऑटो-ट्रॅकिंग अल्गोरिदमच्या इनपुटवर लक्ष्य चिन्हांचे दोन प्रवाह प्राप्त होतात:
"खरे लक्ष्य", लक्ष्यांच्या वास्तविक स्थानाजवळ गटबद्ध;
"खोटे लक्ष्य," ज्याचा एक भाग हस्तक्षेप आणि स्थानिक वस्तूंच्या प्रतिबिंबांच्या क्षेत्राशी जोडलेला आहे आणि दुसरा स्टेशनच्या दृश्य क्षेत्रामध्ये समान रीतीने वितरित केला जातो.
स्वतःच्या रडार सर्वेक्षणात प्राप्त झालेल्या गुणांचा ठराविक संच, त्याच प्रक्षेपकाशी संबंधित असल्याचे निश्चित केले असल्यास, पुढील कार्य म्हणजे या प्रक्षेपकाच्या पॅरामीटर्सचा अंदाज लावणे, ज्यामध्ये परिच्छेद २.२ मध्ये चर्चा केलेल्या पॅरामीटर्सची गणना करणे समाविष्ट आहे. एक्स 0 ,यू 0 ,एन 0 ,व्ही x ,व्ही y ,व्ही एच ,a x ,a yआणि a एच. आरंभिक समन्वय म्हणून दोन लक्ष्य चिन्ह असल्यास एक्स 0 ,यू 0 आणि एन 0 शेवटच्या चिन्हाचे निर्देशांक आणि वेग घटक स्वीकारले जातात व्ही x , व्ही yआणि व्ही एचस्वयंचलित ट्रॅजेक्टोरी कॅप्चर प्रमाणेच गणना केली जाते.
मोठ्या संख्येच्या गुणांमध्ये फरक करताना, लक्ष्य हालचालीच्या अधिक जटिल मॉडेलवर स्विच करणे आणि प्रक्षेपण पॅरामीटर्स गुळगुळीत करणे शक्य आहे. ट्रॅकिंग अचूकतेवर रडार लक्ष्य निर्देशांक मोजण्यासाठी त्रुटींचा प्रभाव कमी करण्यासाठी स्मूथिंग केले जाते. बहुतेकदा एसीएसमध्ये लक्ष्य हालचालींचे एक रेखीय मॉडेल आणि प्रक्षेपक पॅरामीटर्सचे अनुक्रमिक स्मूथिंग असते.
अनुक्रमिक स्मूथिंग पद्धतीचे सार हे आहे की पुढील प्रक्षेपण पॅरामीटर्सची गुळगुळीत मूल्ये k th o6zor ( k-1) पुनरावलोकन, आणि शेवटचे परिणाम kव्या निरीक्षण. कितीही निरीक्षणे केली असली तरी, पुढील गणना चक्रात फक्त मागील अंदाज आणि नवीन निरीक्षणाचे परिणाम वापरले जातात. त्याच वेळी, स्टोरेज क्षमता आणि हार्डवेअर गतीची आवश्यकता लक्षणीयरीत्या कमी झाली आहे.
k-th रडार सर्वेक्षणातील स्थिती आणि वेग गुळगुळीत करण्यासाठी अंतिम अभिव्यक्ती खालीलप्रमाणे आहेत:
आणि या सूत्रांमध्ये हे स्पष्ट आहे की गुळगुळीत समन्वय मूल्य या क्षणी एक्स्ट्रापोलेट केलेल्या बेरजेइतके आहे k- गुळगुळीत निर्देशांकांचे निरीक्षण यू* FE आणि गुणांकासह घेतले kमापन परिणामांमधून एक्स्ट्रापोलेटेड समन्वयाचे विचलन.
मध्ये स्मूथ्ड स्पीड व्हॅल्यू kव्या पुनरावलोकन व्ही * यू K ही गुळगुळीत गतीची बेरीज आहे व्ही * यू K-1 मध्ये ( k-1)-वे पुनरावलोकन आणि गुणांकासह घेतले kगती वाढ जी विचलनाच्या प्रमाणात आहे.
यू=यूके- यूइ.स.
एन
 तांदूळ.
तांदूळ.
आणि अंजीर. 2.5 लक्ष्य प्रक्षेपण विभाग, स्थानाच्या क्षणी खरे लक्ष्य स्थान आणि मापन परिणाम दर्शविते. जेव्हा समन्वय स्मूथिंग केले जात नाही तेव्हा सरळ रेषेचे विभाग ACS संगणकाद्वारे गणना केलेल्या हालचालींच्या प्रक्षेपणाचे चित्रण करतात (प्रत्येक पुनरावलोकनातील वेग घटक शेवटच्या दोन निरीक्षणांच्या परिणामांवर आधारित निर्धारित केले जातात). लक्ष्य वेलोसिटी वेक्टरच्या दिशेने फिरते. निर्देशांक घेण्याच्या क्षणी, वेग घटकांची पुनर्गणना केली जाते, वर्तमान निर्देशांक आणि लक्ष्याच्या हालचालीची दिशा अचानक बदलते. kआकृती 2.5 मधील ठिपके असलेली रेषा म्हणजे गुळगुळीत लक्ष्य प्रक्षेपण, ज्याची गणना ACS संगणकामध्ये केली जाते. k-वे पुनरावलोकन. गुळगुळीत निर्देशांकांचे गुणांक या वस्तुस्थितीमुळे kआणि यू 0...1 च्या आत, गुळगुळीत प्रारंभिक समन्वय मध्यांतरात आहे यू* इ.स. व्ही * यूके, आणि गुळगुळीत गती आहे व्ही * यूके-1…
के. k-वे पुनरावलोकन. गुळगुळीत निर्देशांकांचे गुणांक या वस्तुस्थितीमुळे kहे सिद्ध झाले आहे की लक्ष्याच्या रेक्टलाइनर एकसमान गतीसह, गुणांक असल्यास ट्रॅकिंग त्रुटी कमीतकमी असतील.

 (2.9)
(2.9)
आकृती 2.6 अवलंबित्व दाखवते k-वे पुनरावलोकन. गुळगुळीत निर्देशांकांचे गुणांक या वस्तुस्थितीमुळे kपुनरावलोकन क्रमांकावरून k. आकृतीतील आलेख दर्शवितात की गुणांक असिम्प्टोटिकपणे शून्याकडे जातात. येथे मर्यादेत k हे लक्ष्य ट्रॅकिंग त्रुटींचे संपूर्ण निर्मूलन सुनिश्चित करते. सराव मध्ये, नेहमी सरळ रेषेतून लक्ष्य मार्गाचे विचलन असतात.
म्हणून, गुणांकांची मूल्ये k-वे पुनरावलोकन. गुळगुळीत निर्देशांकांचे गुणांक या वस्तुस्थितीमुळे kफक्त ठराविक मर्यादेपर्यंत कमी करा.
लक्ष्य ट्रॅकिंगच्या अचूकतेवर गुळगुळीत होण्याच्या परिणामाचे चित्र 2.7 वापरून गुणात्मक मूल्यांकन केले जाऊ शकते. सरळ रेषेच्या मोशनच्या विभागात, गुळगुळीत लक्ष्य निर्देशांकांची त्रुटी अनस्मूथ केलेल्यांपेक्षा कमी असते: ठिपके असलेले रेषाखंड घन रेषेपेक्षा खऱ्या लक्ष्य प्रक्षेपकाच्या जवळ असतात. युक्ती क्षेत्रात, लक्ष्याच्या हालचालीचे खरे स्वरूप आणि काल्पनिक एक यांच्यातील विसंगतीमुळे, डायनॅमिक ट्रॅकिंग त्रुटी उद्भवतात. आता ठिपके असलेल्या रेषांच्या सेगमेंटच्या तुलनेत घन रेषांचे विभाग अधिक अचूकपणे लक्ष्याची वास्तविक स्थिती निर्धारित करतात.
एअर डिफेन्स ऑटोमेटेड कंट्रोल सिस्टीममध्ये, नॉन-युवरिंग लक्ष्यांसह, गुणांकांची निवड k-वे पुनरावलोकन. गुळगुळीत निर्देशांकांचे गुणांक या वस्तुस्थितीमुळे kविविध प्रकारे उत्पादित केले जाते: ते एकतर प्रारंभिक ते काही अंतिम मूल्यांपर्यंत पुनर्गणना केले जाऊ शकतात किंवा संपूर्ण देखभाल कालावधीत अपरिवर्तित राहू शकतात. नंतरच्या प्रकरणात, इष्टतम अनुक्रमिक स्मूथिंग तथाकथित घातांकीय स्मूथिंगमध्ये बदलते. लक्ष्य युक्ती शोधणे ऑपरेटरद्वारे दृश्यमानपणे किंवा स्वयंचलितपणे केले जाऊ शकते. दोन्ही प्रकरणांमध्ये, जर मापन केलेले लक्ष्य निर्देशांक अनुज्ञेय समन्वय मापन त्रुटींपेक्षा जास्त रकमेने एक्स्ट्रापोलेटेडपेक्षा भिन्न असेल तर लक्ष्य हे युक्तीवाद मानले जाते.
झेड
तांदूळ. २.६. K वर स्मूथिंग गुणांकांचे अवलंबन.
तांदूळ. २.७. लक्ष्य ट्रॅकिंगच्या अचूकतेवर स्मूथिंग ट्रॅजेक्टोरी पॅरामीटर्सचा प्रभाव



सामान्यतः, वर्तमान (दिलेल्या वेळी एक्स्ट्रापोलेट केलेले) लक्ष्य निर्देशांकांची गणना संकेतक, संप्रेषण चॅनेल, इतर अल्गोरिदमचे मेमरी झोन इ. माहिती आउटपुटच्या क्षणांशी जुळण्यासाठी कालबद्ध केली जाते. लक्ष्य निर्देशांकांची अंदाजित मूल्ये वापरून मोजली जातात सूत्रे:

 (2.10)
(2.10)

कुठे ट y- लीड टाइम, वर्तमान क्षणापासून मोजला जातो ट.
सहसा ट yहवेच्या स्थितीचे मूल्यांकन करताना, ते कमांडर्सद्वारे सेट केले जाते आणि इतर डेटा प्रोसेसिंग कार्ये सोडवताना, ते एसीएस संगणकाच्या कायमस्वरूपी मेमरीमधून वाचले जाते.
लक्ष्य ट्रॅकिंगचा अंतिम टप्पा म्हणजे नवीन दिसणाऱ्या गुणांना विद्यमान मार्गक्रमणांसोबत जोडण्याची समस्या सोडवणे. एअरस्पेस क्षेत्रांच्या गणितीय गेटिंगच्या पद्धतीद्वारे ही समस्या सोडवली जाते. त्याचे सार समानतेच्या पूर्ततेच्या मशीन सत्यापनामध्ये आहे, ज्याच्या मदतीने हे स्थापित केले जाते की चिन्ह अभ्यासाखालील क्षेत्राचे आहे. या प्रकरणात, आयताकृती किंवा गोलाकार स्ट्रोब बहुतेकदा वापरले जातात. त्यांचे मापदंड आकृती 2.8 मध्ये दर्शविले आहेत.
द्या एक्सअरे, यूई - काही वेळी एक्सट्रापोलेटेड लक्ष्य समन्वय ट. पुढील पुनरावलोकनात मिळालेल्या गुणांपैकी कोणते गुण दिलेल्या मार्गाशी संबंधित आहेत हे शोधण्यासाठी, तुम्हाला अटी तपासण्याची आवश्यकता आहे:
पी
तांदूळ. २.८. गेट पॅरामीटर्स
|एक्स 1 -एक्सइ | एक्स pp; | वाय 1 -वायइ | वाय pp; (2.11)
गोलाकार स्ट्रोब वापरताना -
(एक्स i – एक्सइ) २ + ( वाय i – वायइ) २ आर pp, (2.12)
कुठे एक्सपृष्ठ, वाय str - आयताकृती स्ट्रोबचे परिमाण;
आर pp - गोलाकार स्ट्रोबचा आकार.
सर्व संभाव्य "ट्रॅजेक्टोरी-मार्क" जोड्यांची गणना केल्यामुळे, प्रत्येक पुनरावलोकनामध्ये हे स्थापित केले जाते की कोणते चिन्ह विद्यमान चालू ठेवतात आणि कोणते नवीन मार्ग सुरू करतात.
लक्ष्य ट्रॅजेक्टोरीजचा मागोवा घेण्यासाठी अल्गोरिदमच्या वर्णनावरून, हे स्पष्ट होते की हवेच्या परिस्थितीबद्दल माहितीवर प्रक्रिया करणे ही एक अतिशय श्रम-केंद्रित प्रक्रिया आहे ज्यासाठी भरपूर RAM आणि ACS संगणकाची गती आवश्यक आहे.