
Mitsubishi w praktyce badało wykorzystanie systemów napęd na wszystkie koła, aby zdecydować, które rozwiązanie technologiczne będzie najbardziej odpowiednie dla tego typu samochodu i najwygodniejsze dla przyszłych posiadaczy tego kompaktowego crossovera.
Inżynierowie odwrócili się od tradycyjnego rozwiązania - zastosowania automatyczna skrzynia z napędem na wszystkie koła „na żądanie”. Takie systemy opierają się na fakcie, że gdy przednie koła się ślizgają, część momentu obrotowego jest redystrybuowana do tylne koła. Specjaliści Mitsubishi zrozumieli, że konsument był bardziej zainteresowany systemami, które aktywnie zmniejszają prawdopodobieństwo poślizgu kół.
Poprzedni Outlander posiadał stały napęd na cztery koła centralny mechanizm różnicowy, blokowany sprzęgłem wiskotycznym, rozkład napędu wzdłuż osi 50:50 Układ ten zapewnia doskonałe osiągi w ciężkich warunki pogodowe, ale przy codziennej eksploatacji zużycie paliwa było wysokie. Mitsubishi starał się dawać nowego Outlandera ten sam lub najlepsze cechy kiedy używany w trudne warunki, przy minimalnych zmianach w zużyciu paliwa.
Był więc system napędu na wszystkie koła skrzynie biegów MITSUBISHI AWC ( Wszystkie koła kontrola). Z języka angielskiego All Wheel Control dosłownie oznacza kontrolę nad wszystkimi kołami. System ten zapewnia kierowcy wybór rodzaju napędu. System jest zasadniczo połączeniem specjalnych przekładnia napędu na wszystkie koła Multi-Select 4WD i dystrybucja elektroniczna moment obrotowy, a oprócz tego kontrola trakcji nowoczesny układ i systemu stabilność kursu walutowego. Dzięki systemowi AWC uzyskuje się doskonałą przyczepność kół samochodu do drogi oraz doskonałe prowadzenie na śliskich odcinkach toru. Aby zapewnić optymalną wydajność przekładni, wystarczy wybrać jeden z trzech trybów prezentowanych na konsoli środkowej „2WD”, „4WD” lub „Lock”.
| Tryb jazdy | Opis | Zalety |
| Napęd na 2 koła | Wysyła moment obrotowy na przednie koła | Lepsze zużycie paliwa, mniejszy hałas pojazdu, lepsze prowadzenie. Zachowuje to również możliwość, że jednostka sterująca kieruje moment obrotowy na tylną oś, aby zmniejszyć jej hałas. |
| Auto z napędem na 4 koła | Dozuje kierunek momentu obrotowego na tylne koła w zależności od położenia pedału przyspieszenia i różnicy prędkości przednich i tylnych kół | Optymalny rozkład momentu obrotowego dla danych warunków jazdy. Rozdział momentu obrotowego między przednią i tylną osią jest automatyczny jednostka elektroniczna w zależności od parametrów jazdy pojazdu (prędkości kół przednich i tylnych, położenia pedału przyspieszenia i prędkości pojazdu). Preferowany jest tryb napędu na 2 koła. |
| Blokada 4WD | Na tylne koła przekazywany jest 1,5 razy większy moment obrotowy niż w trybie 4WD | Zwiększa przyczepność do podłoża, zapewnia stabilność na wysoka prędkość oraz lepiej krzyż na nierównych lub śliskich powierzchniach. Tryb LOCK jest podobny do trybu 4WD, ale ze zmodyfikowanym prawem rozkładu momentu obrotowego między osiami. Przy niskiej prędkości dla tylna oś Dostarczany jest 1,5 razy większy moment obrotowy, a przy dużej prędkości moment obrotowy rozkłada się równo między osie. |
Dwa tryby jazdy
Auto z napędem na 4 koła
Po wybraniu „4WD Auto” system 4WD Samochód Outlandera Napęd 4WD stale przekazuje część momentu obrotowego na tylne koła, automatycznie zwiększając to przełożenie po naciśnięciu pedału gazu. Sprzęgło kieruje do 40% przyczepności na tylne koła przy pełnym otwarciu przepustnicy i zmniejsza ją nawet o 25% przy prędkościach powyżej 40 mil na godzinę. Na ruch jednostajny przy prędkości przelotowej do 15% dostępnego momentu obrotowego trafia na tylne koła. Przy niskich prędkościach w ostre zakręty siła jest zmniejszona, zapewniając płynne przejście skręcać.
Blokada 4WD
Do jazdy w trybie specjalnym trudne warunki np. na śniegu kierowca może wybrać tryb „4WD Lock”. Gdy blokada jest włączona, system nadal automatycznie rozdziela moment obrotowy między przednie i tylne koła, ale większość momentu obrotowego jest przenoszona na tylne koła. Na przykład podczas przyspieszania na wzniesieniu sprzęgło natychmiast przenosi większość momentu obrotowego na tylne koła, aby zapewnić przyczepność wszystkim czterem kołom. Wręcz przeciwnie, automatyczny napęd na cztery koła „na żądanie” najpierw „zaczeka” na poślizg przednich kół, a dopiero potem przekaże moment obrotowy na tylne koła, co może przeszkadzać w przyspieszaniu.
Na suchej nawierzchni tryb 4WD Lock zapewnia efektywne przyspieszenie. Większy moment obrotowy kierowany jest na tylne koła, co zapewnia więcej mocy, lepsze prowadzenie podczas przyspieszania na zaśnieżonych lub sypkich drogach i poprawia stabilność duże prędkości. Udział momentu obrotowego na tylnych kołach jest zwiększony o 50% w porównaniu z trybem 4WD, co oznacza, że nawet 60% dostępnego momentu obrotowego jest kierowane na tylne koła, gdy pedał przyspieszenia jest całkowicie wciśnięty na suchej nawierzchni. W trybie 4WD Lock w ciasnych zakrętach moment obrotowy tylnego koła nie jest redukowany w takim samym stopniu, jak podczas jazdy w trybie 4WD Auto.
Stosunek momentu obrotowego do przednich / tylnych kół w trybie 4WD ma następujące wartości:
| Tryb jazdy | sucha droga | zaśnieżona droga | ||
| koła | przód | tył | przód | tył |
| Przyśpieszenie | 69% | 31% | 50% | 50% |
| przy 30 km/godz | przy 30 km/godz | przy 15 km/godz | przy 15 km/godz | |
| 85% | 15% | 64% | 36% | |
| przy 80 km/godz | przy 80 km/godz | przy 40 km/godz | przy 40 km/godz | |
| Stałej prędkości | 84% | 16% | 74% | 26% |
| przy 80 km/godz | przy 80 km/godz | przy 40 km/godz | przy 40 km/godz | |
Schemat strukturalny

Elementy i funkcje systemu
|
Nazwa komponentu |
Funkcjonowanie |
|
|
|
Przesyła następujące sygnały do wymaganego 4WD-ECU przez CAN.
|
|
|
Przełącznik trybu jazdy 2WD/4WD/LOCK |
Przesyła sygnał położenia przełącznika trybu jazdy dla 4WD-ECU. |
|
|
|
System ocenia warunki drogowe i na podstawie sygnałów z każdego ECU, przełącznik trybu jazdy kieruje wymaganą ilość momentu obrotowego na tylne koła. Obliczenie optymalnej siły ograniczającej mechanizm różnicowy na podstawie stanu samochodu i aktualnego trybu jazdy na podstawie sygnałów z każdego ECU, przełącznik trybu jazdy steruje wartością prądu dostarczaną do elektronicznego łącza sterującego. |
|
|
Zarządzanie wydajnością (wskaźnik pracy 4WD i wskaźnik blokady) w zestawie wskaźników. |
|
|
Steruje funkcją autodiagnostyki i funkcją przełączania awaryjnego. |
|
|
Kontrola funkcji diagnostycznej (kompatybilna z MUT-III). |
|
|
Elektroniczne sterowanie sprzęgłem |
4WD-ECU wysyła moment obrotowy odpowiadający aktualnej wartości na tylne koła. |
|
Wskaźnik trybu jazdy
|
Wbudowany w zestawie wskaźników wskazuje wybrany tryb przełączania trybu jazdy (nie jest wyświetlany w trybie 2WD).
|
|
Złącze diagnostyczne |
Wyświetla kody diagnostyczne i nawiązuje komunikację z MUT-III. |
Konfiguracja systemu

System kontroli

Schemat okablowania sterowania elektronicznego 4 WD

Projekt


Elektroniczne sterowanie sprzęgłem składa się z obudowy przedniej (obudowa przednia), sprzęgła głównego (sprzęgła głównego), mechanizmu krzywki głównej (krzywki głównej), kuli (kulki), mechanizmu krzywki sterowanej (krzywka pilotująca), twornika (tworu), sprzęgła sterowanego (krzywka pilotująca sprzęgło), obudowa tylna (obudowa tylna), cewka magnetyczna (cewka magnetyczna) i wał (wał).
- Przednia obudowa jest podłączona do wał kardana i obraca się wraz z wałem.
- Przed obudową sprzęgło główne (sprzęgło główne) i sprzęgło sterowane (sprzęgło pilotujące) są osadzone na wale (sprzęgło sterowane) (sprzęgło sterowane (sprzęgło pilotujące) jest instalowane przez ogranicznik krzywki (krzywka pilotująca)).
- Wał jest zazębiony przez zęby z zębnikiem napędowym tylnego mechanizmu różnicowego.
Funkcjonowanie
Sprzęgło odłączone (napęd na 2 koła: cewka magnetyczna odłączona od zasilania).

Siła napędowa ze skrzyni rozdzielczej przez wał napędowy jest przenoszona na przednią obudowę (obudowa przednia). Ponieważ cewka magnetyczna (cewka magnetyczna) jest pozbawiona napięcia, sprzęgło sterowane (sprzęgło pilotujące) i sprzęgło główne (sprzęgło główne) nie są załączone, a siła napędowa nie jest przenoszona na wał (wał) i przekładnię zębatą (napęd koło zębate) tylnego mechanizmu różnicowego.
Sprzęgło działa (4WD: cewki magnetyczne Napięcie.)

Siła napędowa ze skrzyni rozdzielczej przez wał napędowy jest przenoszona na przednią obudowę (obudowa przednia). Gdy cewka magnetyczna jest zasilana, między tylną obudową, sterowaną przez sprzęgło pilotujące, a twornikiem, powstaje pole magnetyczne. Pole magnetyczne oddziałuje na sterowane sprzęgło (sprzęgło pilotujące) i twornik (twornik) zawiera sprzęgło (sprzęgło pilotujące). Gdy sprzęgło sterowane (sprzęgło pilotujące) jest załączone, siła napędowa jest przenoszona na sterowany mechanizm krzywkowy (krzywka pilotująca). W odpowiedzi na tę siłę kulka (kula) w mechanizmie krzywkowym (krzywka główna) (krzywka pilotująca) cofa się i generuje impuls translacyjny. Impuls ten oddziałuje na sprzęgło główne (sprzęgło główne) i moment obrotowy przekazywany jest na tylne koła poprzez wał i napęd tylnego mechanizmu różnicowego.
Regulując prąd dostarczany do cewki magnetycznej, ilość siła napędowa przenoszony na tylne koła można regulować w zakresie od 0 do 100%.
zostanie wypuszczony w 2016 roku ze zmienionym nadwoziem i nową charakterystyką, nowa wersja będzie łączyć cechy terenowe swoich krewnych, a także element sportowy. W poprzedniej wersji wielu użytkowników narzekało na ciężki przód auta. Teraz projektanci uwzględnili życzenia – nowa wersja sprawia wrażenie agresywnego crossovera. Z przodu samochodu nabyte chromowane listwy.
Salon
W Rosji kupującym prezentowana jest wyłącznie pięciomiejscowa wersja crossovera. Chociaż Salon pokazuje również oznaki trzech rzędów. Wygodna funkcja- możliwość zmiany kąta oparcia sofy. Lądowanie jest wygodne, miejsca jest wystarczająco dużo w każdym samolocie. Przestrzeń wewnętrzna Salon nie otrzymał globalnej zmiany, tylko lustro z funkcją automatycznego przyciemniania. Z technicznego punktu widzenia ten samochód jest głęboko przerobiony. Na kierownicy pojawiły się fale i nawet przyjemnie się ją trzymało. Pojawił się Informacja zwrotna kierownica. Zrobili dobrą robotę z wygłuszeniem, teraz dudnienie gumy i dźwięki zewnętrzne nie są tak bardzo słyszalne.
Pień
W mieście kupujemy sedany i doładowane hatchbacki za jazdę i dynamikę, a crossovery kupujemy dla przyjemności duszy, gdzie samochody nie mogą przejechać, przejedzie nasz crossover. Dla miłośnika wakacyjnych wypadów za miasto leśnymi drogami najważniejsza jest nie tylko wielkość silnika i jego charakterystyka, ale także objętość bagażnika, która zmieści wszystko do rekreacji na świeżym powietrzu, ale tutaj ta objętość wystarczy. Całkowita pojemność bagażnika to 591 l / 1754 l, który można otworzyć na trzy sposoby. Ale też o koło zapasowe nie zapomnieli producenci, koło zapasowe bardzo korzystnie znajduje się pod spodem Mitsubishi Outlandera, co nie zajmie miejsca w Bagażnik Mitsubishi obcy.
Napęd na cztery koła Mitsubishi Outlander 2016 wydany od 3 różne silniki:
1: 2,0 l „DOHC MIVEC”
2: 2,4 l DOHC-MIVEC
3. Najmocniejszy dla tego samochodu 3.0L V.6 DOHC-MIVEC
Co to jest MIVEC? - Technologia automatycznego sterowania rozrządem (dzięki temu systemy elektryczne regulowane optymalna moc i zużycie paliwa).
Samochód o przeciętnych osiągach - 2,4 litra rozwija 167 KM. Moment obrotowy 222 Nm przy 4100 obr./min, prędkość maksymalna 198 km/h. Prześwit samochodu wynosi 215 mm, rozstaw osi wynosi 2 m 67 cm, pojemność zbiornika paliwa wynosi 63 litry. Zużycie robocze wynosi 13 litrów na sto. Cena tej wersji wynosi 1 619 990 tysięcy rubli.
Zawieszenie
Samochód jest również wyposażony w prawie wszystkie systemy pomagające zarządzać tym transportem. Ten model zdał pomyślnie egzamin z powieszenia po przekątnej. Zawieszenie stało się bardziej elastyczne. Charakterystyka geometryczna Outlandera po zmianie stylizacji uległa zmianie - kąty zawieszenia, wyjścia i ram stały się równe 21 stopni, co jest prawie idealne do pokonywania wszelkich przeszkód, na które samochód może wjechać. O zawieszeniu Mitsubishi Outlander można wiele powiedzieć, ale jeśli chodzi o: Mitsu zostało przerobione z elektrycznym wspomaganiem kierownicy i zmieniono ustawienia kierownicy, założono nowe sprężyny, a najważniejsze było to, że zmieniono „amortyzatory” - stały się mocniejsze teraz zawieszenie może wytrzymać duże obciążenia.
Na drodze powszechny użytek ten samochód przypomina, że na świecie nie ma cudów, przeżywa emocje i toczy się prawie krytycznie, ale spodoba ci się, ponieważ ten model nie pozwoli ci czuć się niepewnie na drodze iw terenie. Aby mieć lepszą obsługę i drożność w terenie, Mitsubishi Outlander ma wbudowany tryb napędu na wszystkie koła BLOKADA NAPĘDU NA 4 KOŁA- po włączeniu wiele zamków będzie używanych w jak największym stopniu sprzęgło tarczowe.
Jeśli spojrzysz na inne samochody z boku, nie od razu zgadniesz o ich potencjale drogowym, ale o Mitsubishi Outlandera nie można tak powiedzieć, jego odważny i mocny wygląd natychmiast przyciąga wzrok.
Charakterystyka Opcje i ceny Zdjęcie i wideo
Wersja podstawowa
Typ silnika: Benzyna
Wielkość silnika: 2.0
KM: 146 KM
Moment obrotowy: 196 Hm przy 4200
Dysk: pełny
Skrzynia biegów: automatyczna
Zużycie paliwa na 100 km: Miasto - 9,5 litra, Autostrada - 6,1 litra, Mieszane - 7,3 litra.
maksymalna prędkość: 193 kilometrów na godzinę
Przyspieszenie od 0 do 100 km/h: 11,1 sekundy
Rodzaj paliwa: AI-92
Wymiary koła: 16 x 6,5 J
Rozmiary opon wyłączone: 215 / 70 R16
Instyle 4WD CVT S08
W Rosji od 1 619 990 rubli.
Charakterystykę techniczną Mitsubishi Outlander określają trzy opcje zastosowanych elektrowni. Dwie benzynowe „czwórki” o pojemności 2,0 i 2,4 litra dają 146 i 167 KM. odpowiednio. Na szczycie linia motoryczna to 3,0-litrowy silnik V6 przeznaczony do wersje Mitsubishi Outlander Sport. On się rozwija maksymalna moc 230 KM i generuje moment obrotowy 292 Nm (przy 3750 obr./min).
Najlepsza modyfikacja Outlandera obejmuje instalację w parze z jednostka mocy 6 prędkości skrzynia automatyczna koła zębate. Inne wersje crossovera są wyposażone w Jatco CVT ósmej generacji z przemiennikiem momentu obrotowego. Tandem V6 230 KM i 6automatyczna skrzynia biegów zapewnia sport wersje Outlandera dobra dynamika– do 100 km/h samochód przyspiesza w 8,9 sekundy. Taką zwinnością nie może pochwalić się opcja crossovera, która ukrywa pod maską dowolną parę 4-cylindrowych jednostek, spędzając ponad 10 sekund na zrywie do „setki”.
Średnie zużycie paliwa Mitsubishi Outlander waha się od 7,3 do 8,9 litra. Najbardziej „nienasycona” jest oczywiście 3,0-litrowa „szóstka”, według danych paszportowych, zużywająca około 12,2 litra paliwa w cyklu miejskim.
Parametry geometryczne karoserii są interesujące przede wszystkim ze względu na równość kątów wejścia i wyjścia, z których każdy nie przekracza 21 stopni. Kąt nachylenia ma takie samo znaczenie. Prześwit(prześwit) Mitsubishi Outlander ma 215 mm.
Japoński crossover jest dostępny w wersjach z napędem na przednie i wszystkie koła. Napęd na przednie koła jest dostępny tylko dla wersji z silnikiem „junior” o pojemności 2,0 litra. Napęd na cztery koła ma dwie możliwe konfiguracje: All Wheel Control (AWC) i Super All Wheel Control (S-AWC). Druga opcja, która zwiększa stabilność w szybkich zakrętach i na śliskich nawierzchniach, została opracowana specjalnie dla Outlandera Sport 3.0.
Techniczny Charakterystyka Mitsubishi Outlander - tabela przestawna:
| Parametr | Outlander 2.0 CVT 146 KM | Outlander 2.4 CVT 167KM | Outlander Sport 3.0 o mocy 230 KM | |
|---|---|---|---|---|
| Silnik | ||||
| typ silnika | benzyna | |||
| Rodzaj wtrysku | Rozpowszechniane | |||
| Doładowanie | Nie | |||
| Liczba cylindrów | 4 | 6 | ||
| Układ cylindrów | wiersz | w kształcie litery V | ||
| Liczba zaworów na cylinder | 4 | |||
| Objętość, cu. cm. | 1998 | 2360 | 2998 | |
| Moc, KM (przy obrotach na minutę) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| Przenoszenie | ||||
| Jednostka napędowa | przód | pełne (AWC) | pełne (AWC) | pełne (S-AWC) |
| Przenoszenie | Zmienna prędkość jazdy | 6 automatyczna skrzynia biegów | ||
| Zawieszenie | ||||
| Rodzaj zawieszenia przedniego | Niezależny od typu MacPhersona | |||
| Typ tylnego zawieszenia | niezależny, multilink | |||
| Układ hamulcowy | ||||
| Hamulce przednie | dysk wentylowany | |||
| Hamulce tylne | dysk wentylowany | |||
| Sterowniczy | ||||
| Typ wzmacniacza | elektryczny | |||
| Opony i koła | ||||
| Rozmiar opony | 215/70 R16 | 225/55 R18 | ||
| Rozmiar dysku | 6.5Jx16 | 7.0Jx18 | ||
| Paliwo | ||||
| Typ paliwa | AI-92 | AI-95 | ||
| Objętość zbiornika, l | 63 | 60 | 60 | |
| Zużycie paliwa | ||||
| Cykl miejski, l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| Cykl wiejski, l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| Cykl mieszany, l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| wymiary | ||||
| ilość miejsc | 5 | |||
| Długość, mm | 4695 | |||
| Szerokość, mm | 1800 | |||
| Wysokość (z relingami dachowymi), mm | 1680 | |||
| Rozstaw kół, mm | 2670 | |||
| Rozstaw kół przednich, mm | 1540 | |||
| Rozstaw kół tylnych, mm | 1540 | |||
| Objętość bagażnika (min./maks.), l | 591/1754 | 477/1640 | ||
| Prześwit (prześwit), mm | 215 | |||
| Waga | ||||
| Wyposażony, kg | 1425 | 1490 | 1505 | 1580 |
| Pełny, kg | 1985 | 2210 | 2270 | |
| Maksymalna masa przyczepy (z hamulcami), kg | 1600 | |||
| Charakterystyka dynamiczna | ||||
| Maksymalna prędkość, km/godz | 193 | 188 | 198 | 205 |
| Czas przyspieszenia do 100 km/h, s | 11.1 | 11.7 | 10.2 | 8.7 |
Silniki Mitsubishi Outlander - dane techniczne
Wszystkie trzy silniki dostępne dla crossovera są wyposażone w system sterowania skokiem zaworów MIVEC. Pozwala w zależności od prędkości zmieniać tryb pracy zaworów (czas otwarcia, nakładanie się faz), co pozwala na zwiększenie mocy silnika, oszczędność paliwa i redukcję szkodliwych emisji.
Cechy silników Mitsubishi Outlander:
| Parametr | Outlander 2.0 146 KM | Outlander 2.4 167 KM | Outlander 3.0 230 KM |
|---|---|---|---|
| Kod silnika | 4B11 | 4B12 | 6B31 |
| typ silnika | benzyna bez turbodoładowania | ||
| Układ zasilania | wtrysk rozproszony, układ elektroniczny Sterowanie zaworami MIVEC, dwa wałki rozrządu (DOHC), napęd łańcucha rozrządu | rozproszony wtrysk, elektroniczny system sterowania zaworami MIVEC, jeden wałek rozrządu na rząd cylindrów (SOHC), napęd paska rozrządu | |
| Liczba cylindrów | 4 | 6 | |
| Układ cylindrów | wiersz | w kształcie litery V | |
| Liczba zaworów | 16 | 24 | |
| Średnica cylindra, mm | 86 | 88 | 87.6 |
| Skok tłoka, mm | 86 | 97 | 82.9 |
| Stopień sprężania | 10:1 | 10.5:1 | |
| Objętość robocza, cu. cm. | 1998 | 2360 | 2998 |
| Moc, KM (przy obrotach na minutę) | 146 (6000) | 167 (6000) | 230 (6250) |
| Moment obrotowy, N*m (przy obr./min) | 196 (4200) | 222 (4100) | 292 (3750) |
Napęd na wszystkie koła Mitsubishi Outlander
System All Wheel Control (AWC) to konfiguracja napędu na przednie koła, w której tylna oś jest połączona za pomocą sterowanego elektronicznie sprzęgła elektromagnetycznego. Do 50% ciągu można skierować do tyłu. Istnieją trzy tryby pracy napędu AWC - ECO, Auto i Lock. W trybie ekonomicznym domyślnie cały moment obrotowy przekazywany jest na przednią oś, a tylna aktywowana jest tylko w przypadku poślizgu. Tryb Auto rozkłada wysiłek w optymalny sposób na podstawie danych odbieranych przez jednostkę elektroniczną (prędkość kół, pozycja pedału przyspieszenia). Tryb blokady zwiększa ilość momentu obrotowego przenoszonego na tylne koła, co gwarantuje pewne przyspieszenie i bardziej stabilne zachowanie na niestabilnych nawierzchniach. Główna różnica między trybami Lock i Auto polega na tym, że tylne koła początkowo uzyskują lepszą przyczepność, niezależnie od tego, czy wykryto poślizg, czy nie. 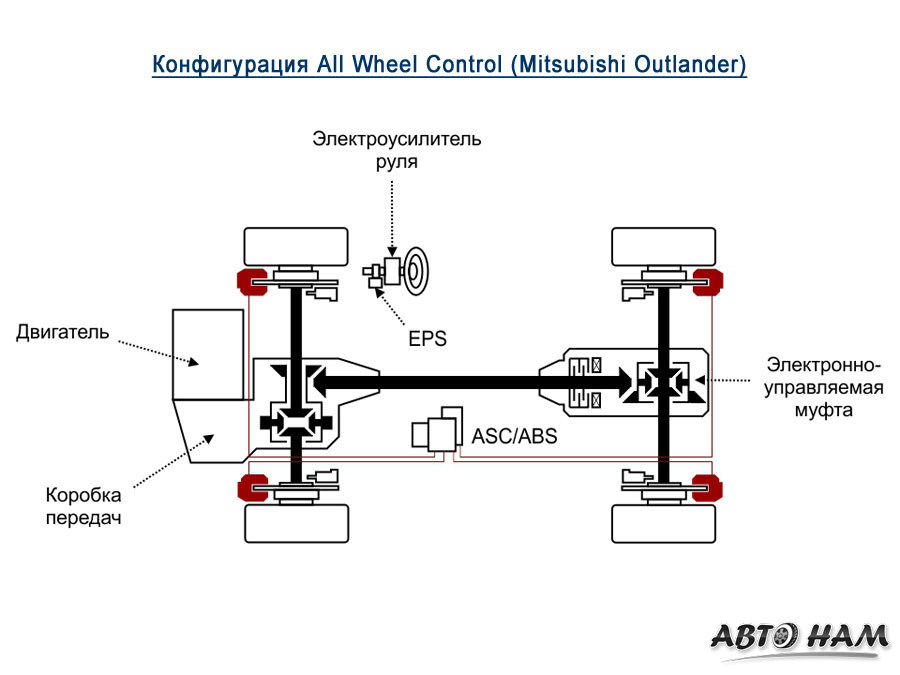
System Super All Wheel Control (S-AWC) to zaawansowana odmiana konwencjonalnego AWC, w którym na przedniej osi zainstalowany jest aktywny mechanizm różnicowy (AFD), który rozdziela moc między koła. Tym samym pojawia się dodatkowy mechanizm kontrolowania zachowania samochodu. S-AWC obejmuje system stabilizacji, ABS, elektryczne wspomaganie kierownicy i układ hamulcowy. Tak, jednostka sterująca Super system All Wheel Control może w określonych warunkach inicjować hamowanie kół, na przykład w przypadku znoszenia podczas pokonywania zakrętu.
Pełny selektor trybu pracy Napęd S-AWC ma cztery pozycje: Eco, Normal, Snow i Lock. Tryb Snow optymalizuje ustawienia systemu do jazdy po śliskich nawierzchniach. 
W systemie napędu na wszystkie koła z sterowanie elektroniczne Istnieją trzy tryby pracy, które można wybrać, obracając przełącznik w zależności od warunków drogowych.
Tryby jazdy są następujące.
Kontrola pojazd z napędem na cztery koła wymaga specjalnych umiejętności prowadzenia pojazdu.
Przeczytaj uważnie rozdział „Korzystanie z napędu na 4 koła” i zachowaj bezpieczny styl jazdy.
Wyboru trybu dokonuje się obracając włącznik przy dołączonym zapłonie.
- AUTOMATYCZNY NAPĘD 4WD
- BLOKADA NAPĘDU NA 4 KOŁA
W momencie zmiany trybu jazdy, w oknie informacyjnym wyświetlacza wielofunkcyjnego pojawia się nowy tryb, przerywając na chwilę bieżące odczyty.
Po kilku sekundach na wyświetlaczu ponownie pojawi się poprzednie okno.
Ostrzeżenie
- Zabrania się zmiany trybu jazdy w momencie, gdy przednie koła się ślizgają (np. na śniegu). Może to spowodować szarpnięcie pojazdu w nieprzewidywalnym kierunku.
- Jazda po suchej nawierzchni w trybie 4WD LOCK powoduje zwiększone zużycie paliwa i zwiększonego poziomu hałasu.
- Nie zaleca się jazdy w trybie 2WD, jeśli koła się obracają.
Może to prowadzić do przegrzania jednostek transmisyjnych i zespołów.
Notatka
Tryb jazdy można przełączać zarówno na parkingu, jak i podczas jazdy.
Okno wyświetlacza pojawia się po włączeniu zapłonu, a następnie jest wyświetlane przez kilka sekund po uruchomieniu silnika. 
Na wyświetlaczu widoczne są następujące okna trybu jazdy.
| Tryb jazdy | ||
|---|---|---|
| Wskaźnik napędu na 4 koła | Wskaźnik BLOKADA | |
| Napęd na 2 koła | WYŁĄCZONY | WYŁĄCZONY |
| AUTOMATYCZNY NAPĘD 4WD | W ZESTAWIE | WYŁĄCZONY |
| BLOKADA NAPĘDU NA 4 KOŁA | W ZESTAWIE | W ZESTAWIE |
Ostrzeżenie

Najpopularniejszy „prawdziwy” schemat napędu na wszystkie koła był stosowany w prawie wszystkich oryginalnych modelach z napędem na przednie koła. Są tu trzy dyferencjały, środkowy mechanizm różnicowy (umieszczony w zależności od konkretnego schematu w obudowie skrzyni biegów lub obudowie skrzyni rozdzielczej) jest zablokowany, a moment obrotowy rozkłada się równomiernie między osie. Ta zasada jest podobna.
- Plusy - stabilność na drodze, względna przewidywalność zachowania, dobra zdolność do jazdy w terenie i niezawodność.
- Wady - niewystarczający współczynnik blokowania za pomocą lepkiego sprzęgła i szybkość jego „działania”.
| Model | modyfikacje |
| Lancer-Mirage-Libero | (CCxA*) właz. 1991-1996, (CDxA) wyd. 1991-1996, (CDxW). 1992-1999 |
| Lansjer Miraż | (CLxA) 1996-2001 (hatchback), (CMxA) 1996-2000 (sedan) |
| Ułan | Evolution IV (CN9A) 1996.09-1998.02, AYC-opcja dla GSR |
| Ułan | Evolution V (CP9A) 1998.02-1999.01, AYC - opcja dla GSR99, odp. - LSD (RS/GSR99) |
| Ułan | Ewolucja VI (CP9A) 1999.01-2000.03, AYC dla GSR2000 |
| Galant-Emeraude-Eterna | (E7xA, E8xA) 1992-1996 |
| Galant Legnum | (ECxA, ECxW) 1996-2003 |
| Galant Legnum | (EC5A/EC5W) VR-4 (AYC dla wszystkich) 1996-2002 |
| RVR | (N1xW/N2xW) 1991 - 1997.08 |
| RVR | (N6xW/N7xW) 1997.09 - 2003.01 |
| Rydwan / Grandis | (N3xW/N4xW) 1992.06 - 1997.07 |
| Rydwan / Grandis | (N8xW/N9xW) 1997.08 - 2002 |
| Diament Sigma | (F2xA) (sedan) 1990.05-1994.11 |
| Diament | (F4xA) (sedan) 1994.12-2002.10 |
| GTO/3000GT | (Z1xA) 1990.10-2000.09 |
| Airtrek / Outlander | (CUxW) 2001.03-… |
[ukryć]
VCU
Odkryć...
Stopniowe odchodzenie od pełnoprawnego napędu na cztery koła było wspierane przez wszystkich japońskich producentów samochodów, a MMC nie było wyjątkiem.
Schemat z VCU (Viscous Coupling Unit) jest podobny do Toyoty V-Flex II - nie ma w nim centralnego mechanizmu różnicowego, moment jest skierowany z powrotem wzdłuż wału kardana, gdzie jest zainstalowany przed skrzynią biegów, uruchamiając i połączenie trzpienia kardana i wał wejściowy skrzynia biegów ze znacznym poślizgiem przednich kół. Przez resztę czasu samochód pozostaje z napędem na przednie koła. Zainstalowano opcjonalny tylny mechanizm różnicowy LSD.
- Plusy - prostota i taniość.
- Wady - nieodpowiednie zachowanie podczas aktywnej jazdy, niewystarczający współczynnik blokowania, niska szybkość reakcji.
| Model | modyfikacje |
| Lancer Cedia | (CSxA, CSxW) 2000.05-… |
| Miraż Dingo | (CQxA) 1999.01-2002.12 |
| Dion | (CRxW) 2000.01-… |
| eK Sport-Wagon-Classy | (H81W) 2001.09-… |
| eK Aktywny | (xBA-H81W) 2004.05 -… |
| Minica | (H12V/H15A) 1984-1988 |
| Minica | (H26A/H27A/H27V) 1990.02-1993.08 |
| Minica | (H36A/H37A) 1993.08-1998 |
| Minica | (H46A/H47A) 1998.08-… |
| Minica Toppo | (H27A/H27V) 1990.02-1993.08 |
| Minica Toppo | (H36A/H37V) 1993.08-1997.10 |
| ToppoBJ | (H46A/H47A) 1998.08-2003.08 |
| ToppoBJ szeroki | (H48A) 1998.08-2001.06 |
| Colta Nowy | (Z2xA) 2002.11-… |
| Colt Plus Nowy | (Z2xW) 2004.10-… |
[ukryć]
Wielokrotny wybór
Odkryć...
Oczywiście modny teraz schemat z tylną osią połączoną elektromechanicznym sprzęgłem, który odpowiada, nie stał na uboczu.
 W trybie „2WD” napęd odbywa się tylko na przednie koła. W trybie „4WD” w normalnych warunkach zaangażowane są przednie koła, ale w zależności od warunków jazdy jednostka sterująca może automatycznie przenieść moment na tylną oś. W trybie „LOCK” (na niskich obrotach) sprzęgło jest całkowicie zablokowane, a moment rozkłada się niemal równo między osie.
W trybie „2WD” napęd odbywa się tylko na przednie koła. W trybie „4WD” w normalnych warunkach zaangażowane są przednie koła, ale w zależności od warunków jazdy jednostka sterująca może automatycznie przenieść moment na tylną oś. W trybie „LOCK” (na niskich obrotach) sprzęgło jest całkowicie zablokowane, a moment rozkłada się niemal równo między osie.
- Plusy - połączenie tylnych kół odbywa się „rozsądniej” niż w schemacie VCU; możliwe jest twarde włączenie napędu na wszystkie koła.
- Wady - niezbyt wysoka przeżywalność; nieadekwatność pracy w trybie „4WD”.
[ukryć]
ACD+AYC
Odkryć...
Trzeba przyznać, że najbardziej zaawansowany na świecie system napędu na cztery koła dla pasażerów został opracowany przez firmę MMC – dla różnych generacji Lancera Evolution.
Jest międzyosiowy mechanizm różnicowy, automatycznie blokowany przez sterowane elektronicznie sprzęgło hydromechaniczne (ACD), a kierowca może samodzielnie wybrać „sztywność” jego blokowania.
Drugi najważniejszy składnik jest aktywny tylny mechanizm różnicowy(AYC). Pozwala na regulację momentu obrotowego przenoszonego z silnika na lewe i prawe tylne koło w zależności od nawierzchni, położenia kierownicy i pedału przyspieszenia, prędkości kół oraz prędkości pojazdu. W zakręcie największy moment przekazywany jest na koło zewnętrzne, co tworzy dodatkowy moment skrętu. Na śliskich lub nierównych nawierzchniach AYC zastępuje samoblokujący mechanizm różnicowy (najwięcej momentu obrotowego trafia na koło o najlepszej przyczepności). Począwszy od Ewolucja VIII zastosowano ulepszony mechanizm różnicowy Super-AYC, który różni się zamiast schematu sterowania stożkowego i ze sprzężeniem zwrotnym.
- Plusy - zdolność do jazdy w terenie, sterowalność, maksymalna „inteligencja”.
- Wady - złożoność i koszt projektu.
[ukryć]
Część etatu (EasySelect)
Odkryć...
 Jeden z najprostszych typów napędu na 4 koła (w niektórych modelach nazywa się EasySelect) - z podłączoną przednią osią, bez centralnego mechanizmu różnicowego - jest stosowany w oryginalnych modelach z napędem na tylne koła.
Jeden z najprostszych typów napędu na 4 koła (w niektórych modelach nazywa się EasySelect) - z podłączoną przednią osią, bez centralnego mechanizmu różnicowego - jest stosowany w oryginalnych modelach z napędem na tylne koła.
Schemat przewiduje bezpośrednie sterowanie skrzynią rozdzielczą za pomocą dźwigni. Początkowo przeprowadzono połączenie przednich półosi z kołami sprzęgła mechaniczne wolnobieg („piasty”) z napędem ręcznym lub automatycznym. W nowszych modelach, aby ułatwić proces łączenia przednia oś zastosowano system ADD, który za pomocą napędu pneumatycznego odłącza jeden z półosi przedniego mostu.
- Plusy - względna prostota konstrukcji, obecność redukcji.
- Wady - Tryb 4WD może być używany tylko na śliska powierzchnia(lód, śnieg, mokra droga) i przez ograniczony czas - w przeciwnym razie hałas, wzrost zużycia paliwa, pogorszenie prowadzenia, zużycie opon i samych elementów przekładni. Piasty „ręczne” są niezawodne, ale niezbyt wygodne w użyciu, a automatyczne są dalekie od ideału pod względem przeżywalności.
| Model | modyfikacje |
| Pajero III | (V64W/V74W) 1999.06-… (opcja - tył hybrydowy LSD/DiffLock) |
| Challenger/Pajero Sport/Montero Sport | (K9xW) 1996.05-… (opcja - tył hybrydowy LSD) |
| L200 / Strada | (K7xT) 1996.12-… (opcja - tylne tarcie LSD / DiffLock) |
| Kosmiczny sprzęt Delica | (PDxW/PExW/PFxW) 1994.03-… (opcja - tylne cierne LSD / hybrydowe LSD) |
| Pajero II | (V2xW/V4xW) 1990.10-1999.11 (opcjonalnie - tylne cierne LSD / hybrydowe LSD / DiffLock) |
| L200/Strada | (K3xT) 1991.03-1997.05 (opcjonalnie - tylne tarcie LSD) |
| Wagon Delica Star/L300 | 1987.09-1999.06 (P2xW/P3xW/P4xW) (opcjonalnie - tylne tarcie LSD) |
| Pajero mini | (H56A/H58A) 1996.06-… |
| Pajero Junior | (H57A) 1995.10-1998.04 |
| Pudełko miejskie | (U62W/U62V/U62T/U64W) 1998.11-… (opcja - tylne tarcie LSD) |
| Skrzynka miejska szeroka | (U66W) 1999.04-2001.06 (opcjonalnie - tylne tarcie LSD) |
Część Pajero III otrzymała opcjonalnie MATC (Mitsubishi Active Traction Control), dynamiczny system kontroli trakcji, który na utwardzonych drogach działa jak kontrola trakcji, a jazda terenowa imituje blokowanie przedniego i tylnego mechanizmu różnicowego, spowalniając ślizganie się koła. W trybie 4H znacznie poprawiają się możliwości terenowe bez konieczności stosowania centralnej blokady mechanizmu różnicowego. System ten analizuje warunki jazdy za pomocą czujników, które mierzą prędkość, moment obrotowy nadwozia i przyspieszenie poprzeczne, a także kąt skrętu kierownicy i przyspieszenie wzdłużne. Wady - mniejsza wydajność w porównaniu z DiffLock, możliwe nierównomierne zużycie klocków, gdy ABS przechodzi w tryb awaryjny, blokada znika.
Także ze skrzynią Super Select, tzw. wielomodowy ABS. Hamulce przednie i tylne sterowane są trzema niezależnymi kanałami, co pozwala przyłożyć dokładnie odpowiednią siłę hamowania do każdego koła. Jednak gdy włączona jest centralna blokada mechanizmu różnicowego, współczynniki przyczepności kół są różne i odpowiednio różne siła hamowania może spowodować skręcenie skrzyni biegów i wibracje pojazdu. Mitsubishi rozwiązało ten problem po raz pierwszy na świecie, tworząc wielotrybowy ABS, który działa również w trybie zablokowanego centralnego mechanizmu różnicowego.
System AWC ma trzy tryby kontrolowane przez jednostkę elektroniczną za pomocą pokręteł na konsoli środkowej:
- Napęd na 2 koła(określany jako 4WD ECO na niektórych rynkach): formalnie z napędem na przednie koła, tryb ten polega na przeniesieniu niewielkiej ilości momentu obrotowego na tylne koła w celu zmniejszenia hałasu tylnej osi. Według niektórych doniesień w tym trybie może również wystąpić przeniesienie momentu obrotowego na tylną oś z zauważalnym poślizgiem.
- Auto z napędem na 4 koła: przekazuje do 40% momentu obrotowego na tylne koła, w zależności od położenia pedału przyspieszenia (im bardziej wciśnięty, tym bardziej sprzęgło jest zamknięte), różnicy prędkości przednich i tylnych kół (to zamyka się w przypadku poślizgu i otwiera w przypadku jego braku) oraz prędkość pojazdu. Gdy pedał gazu jest całkowicie wciśnięty, do 40% ciągu jest odsyłane z powrotem, przy prędkości większej niż 64 km / h przenoszenie momentu obrotowego zmniejsza się do 25%. Przy stałej prędkości przelotowej do 15% momentu obrotowego jest przekazywane na tylne koła, a przy niskich prędkościach w ciasnych zakrętach sprzęgło zostaje zmniejszone, zapewniając płynne pokonywanie zakrętów.
- Blokada 4WD: sprzęgło zamyka się bez czekania na poślizg, a przy niskich prędkościach przekazuje do 60% momentu na tylne koła (gdy pedał przyspieszenia jest całkowicie wciśnięty na suchej nawierzchni), a przy dużych prędkościach moment rozkłada się równomiernie między osie. W ciasnych zakrętach moment obrotowy na tylnej osi również w tym trybie nie jest redukowany tak bardzo, jak w trybie 4WD Auto.
We wszystkich trybach elektronika cały czas zmienia stopień zamknięcia sprzęgła, jednak konstrukcyjnie nie może go całkowicie zamknąć, tj. zawsze występuje poślizg i wytwarzanie ciepła w sprzęgle. Rolę blokad międzykołowych pełni system stabilizacji, który spowalnia ślizganie się kół.
| Tryb jazdy | sucha droga | zaśnieżona droga | ||
| koła | przód | tył | przód | tył |
| Przyśpieszenie | 69% | 31% | 50% | 50% |
| przy 30 km/godz | przy 15 km/godz | |||
| 85% | 15% | 64% | 36% | |
| przy 80 km/godz | przy 40 km/godz | |||
| Stałej prędkości | 84% | 16% | 74% | 26% |
| przy 80 km/godz | przy 40 km/godz | |||
Ze względu na ciągłe przegrzewanie się sprzęgła i jego niezdolność do wytrzymywania zauważalnego obciążenia przez długi czas, ten typ napędu można uznać za kompletny tylko przy bardzo dużym rozciągnięciu i nadaje się tylko do poprawy sterowności na twardych nawierzchniach. Stosowany jest, oprócz Outlandera XL, ASX, również w najnowszym Lancerze.
Odkryć...

Komponenty i funkcje:
| Składnik | Funkcjonować |
| Sterownik silnika | |
| ABS/ASC-ECU | Transmituje przez CAN sygnały wymagane przez 4WD-ECU:
|
| Przełącznik trybu jazdy 2WD/4WD/LOCK | Tłumaczy położenie przełącznika trybu jazdy (2WD/4WD/LOCK) dla 4WD-ECU. |
| ETACS-ECU |
|
| 4WD-ECU | System ocenia warunki drogowe i na podstawie sygnałów ze wszystkich ECU oraz przełącznika trybu jazdy kieruje wymagany moment obrotowy na tylne koła. Obliczenie optymalnej siły docisku sprzęgła na podstawie warunków jazdy i aktualnego trybu jazdy na podstawie sygnałów ze wszystkich ECU oraz przełącznika trybu jazdy. |
| Zarządzanie wskaźnikiem działania 4WD i wskaźnikiem blokady w zestawie wskaźników. | |
| Zarządzanie funkcjami autodiagnostyki i odporności na uszkodzenia. | |
| Kontrola funkcji diagnostycznej (kompatybilna z MUT-III). | |
| Elektroniczne sterowanie sprzęgłem | 4WD-ECU przekazuje moment obrotowy odpowiadający aktualnym warunkom na tylne koła za pośrednictwem sprzęgła. |
Wskaźnik trybu jazdy
| Wbudowany wskaźnik w zestawie wskaźników wskazuje wybrany tryb przełączania trybu jazdy (nie jest wyświetlany w trybie 2WD).
|
| Złącze diagnostyczne | Wyprowadzanie kodów diagnostycznych i komunikacja z MUT-III. |
Konfiguracja systemu:

System kontroli:

Schemat okablowania elektronicznego sterowania AWC:

Konstrukcja mechaniczna:


Elektroniczne sterowanie sprzęgłem składa się z obudowy przedniej (obudowa przednia), sprzęgła głównego (sprzęgła głównego), mechanizmu krzywki głównej (krzywki głównej), kuli (kulki), mechanizmu krzywki sterowanej (krzywka pilotująca), twornika (tworu), sprzęgła sterowanego (krzywka pilotująca sprzęgło), tylną obudowę (tylną obudowę), cewkę magnetyczną (cewkę magnetyczną) i wał (wał).
- Przednia obudowa jest połączona z wałem kardana i obraca się wraz z wałem.
- Przed obudową na wale (wałku) osadzone jest sprzęgło główne (sprzęgło główne) i sterowane (sprzęgło pilotujące), natomiast sprzęgło sterowane (sprzęgło pilotujące) jest instalowane przez ogranicznik krzywki (krzywka pilotująca).
[ukryć]
Operacja systemowa
Odkryć...
Sprzęgło wyłączone (2WD). Moment ze skrzyni rozdzielczej przez wał kardana (wał napędowy) jest przenoszony na przód obudowy (obudowa przednia). Dlatego cewka elektromagnetyczna (cewka magnetyczna) jest pozbawiona napięcia, sprzęgło pilotujące i sprzęgło główne nie są włączone, a siła napędowa nie jest przenoszona na wałek (wał) i przekładnię zębatą (zębnik napędowy) tylnego mechanizmu różnicowego.

Sprzęgło włączone (4WD). Moment ze skrzyni rozdzielczej przez wał kardana (wał napędowy) jest przenoszony na przód obudowy (obudowa przednia). Dlatego cewka elektromagnetyczna (cewka magnetyczna) jest zasilana, powstaje pole magnetyczne między tylną obudową (tylną obudową), kontrolowanym tarciem (sprzęgło pilotujące) a zworą (twornikiem). Pole magnetyczne oddziałuje na sterowane sprzęgło i armaturę i włącza sprzęgło. Kiedy sterowane sprzęgło jest włączone, moment obrotowy jest przekazywany do sterowanego mechanizmu krzywkowego (krzywka pilotująca). W odpowiedzi na tę siłę kulka (kula) w mechanizmie krzywkowym (krzywka główna) (krzywka pilotująca) cofa się i generuje impuls translacyjny. Impuls ten oddziałuje na sprzęgło główne, a moment obrotowy przekazywany jest na tylne koła poprzez wał i napęd tylnego mechanizmu różnicowego.
![]()
Moment przenoszony na tylne koła jest kontrolowany poprzez zmianę prądu dostarczanego do uzwojenia sprzęgła.
[ukryć]
[ukryć]
S-AWC i podwójny silnik 4WD
Odkryć...
Wraz z aktualizacją Outlandera XL (teraz to Outlander Sport) i utratą jego agresywnego designu przez Akinori Nakanishi, wadliwy napęd AWC w topowej wersji modelu został zastąpiony przez tzw. Super-AWC, czyli S- AWC. W rzeczywistości jest to zmodyfikowany napęd ACD + AYC, omówiony powyżej, w którym środkowy mechanizm różnicowy ACD został zastąpiony elektromagnetycznym mechanizmem różnicowym aktywnym LSD AFD i uzupełniony elektronicznymi asystentami (układ kierowniczy EPS do łagodzenia szarpnięć z pracy AFD, aktywny ABS i ESP systemy). S-AWC opiera się na zasadzie sterowania wektorem ciągu, gdy automatyczne sterowanie przednim mechanizmem różnicowym, sprzęgłem tylnej osi, hamulcami i wspomaganiem kierownicy rozdziela momenty przenoszone na wszystkie koła. Kluczowym czynnikiem jest to, że system uwzględnia prędkości kątowe.

System S-AWC ma trzy konfiguracje (z których jedna - oryginalny ACD + AYC - jest uważana za referencyjną):

Środkowy mechanizm różnicowy AFD LSD stosowany w przekładni S-AWC jest w zasadzie sprzęgłem elektromagnetycznym i, podobnie jak AYC, jest w stanie kontrolować moment obrotowy przekazywany na przednie koła. Mechanizm blokujący jest produkowany przez angielską firmę GKN - dostarcza również sprzęgło środkowe. Aby ścisnąć sprzęgła, jednostka sterująca napędu na cztery koła dostarcza prąd do uzwojenia elektromagnesu - a jeśli występuje różnica prędkości obrotowych przednich kół, dwie tarcze mechanizmu docisku kulek obracają się względem siebie, tworząc siła osiowa ściskająca sprzęgła (podobnie jak w przekładni AWC). Stopień blokady mechanizmu różnicowego jest stale zmieniany przez elektronikę, ale sztywne połączenie między półosiami nie jest możliwe. Tych. w trudnych warunkach AYC na tylnej osi nie zrobi pogody, bo odpowiedni moment w nią nie trafi, a generalnie tylna oś może się w każdej chwili wyłączyć z powodu przegrzania.

Przekładnia S-AWC posiada cztery tryby pracy:
- AWC EKO dostarcza moment obrotowy tylko na przednią oś („w celu oszczędzania paliwa”) i łączy tylną oś tylko podczas poślizgu;
- NORMALNA optymalnie rozdziela moment obrotowy na wszystkie koła zgodnie z warunkami drogowymi;
- ŚNIEG przeznaczony na śnieg, lód i inne śliskie powierzchnie;
- ZAMEK zamyka wszystkie dyferencjały, zapewniając największy potencjał terenowy.
Osobnym przypadkiem jest również opcja, w której przednia i tylna oś w ogóle nie są ze sobą połączone i każda jest napędzana niezależnie własnym silnikiem elektrycznym:

Jest tu też intryga, bo. według różnych danych tego samego Mitsubishi na osiach można zastosować zarówno mechanizmy różnicowe AYC, jak i konwencjonalne otwarte mechanizmy różnicowe. Lub na przykład na przedniej osi - otwartej, a na tylnej - AYC.
Twin Motors 4WD ma tylko dwa tryby - „NORMALNY” dla normalnych warunków i „4WD LOCK” dla trudnych. Jednocześnie, powiedzmy, testy Autoreview pokazują, że przekładnia Twin Motor 4WD nie jest w stanie pokonać żadnych trudnych warunków. Od słowa „absolutnie”:
Najpierw pojechaliśmy tam, gdzie zwyczajowo jeździ się zimą z napędem na wszystkie koła - na śniegu. Zaczęło się od hybrydy i... od razu skończyło: PHEV natychmiast utknął! ... Algorytm elektrowni jest tajemnicą. Wciskasz gaz i obraca się tylko przednia oś. A następnym razem tylne koła zaczną się kręcić, ale przednie koła będą na miejscu. Puszczasz prawy pedał - a obrót trwa jeszcze przez jakiś czas!

Mitsubishi bada praktyczne zastosowanie układów napędu na wszystkie koła, aby określić, które rozwiązanie technologiczne będzie najbardziej odpowiednie dla tego typu samochodów i najwygodniejsze dla przyszłych właścicieli tego kompaktowego crossovera.
Inżynierowie odwrócili się od tradycyjnego rozwiązania - zastosowania automatycznej skrzyni biegów z połączeniem napędu na wszystkie koła na żądanie. Takie systemy opierają się na fakcie, że gdy przednie koła się ślizgają, część momentu obrotowego jest przenoszona na tylne koła. Specjaliści Mitsubishi zrozumieli, że konsument był bardziej zainteresowany systemami, które aktywnie zmniejszają prawdopodobieństwo poślizgu kół.
Poprzedni Outlander miał stały napęd na cztery koła z centralnym mechanizmem różnicowym z blokadą wiskotyczną, podział napędu 50:50 zapewniał doskonałe osiągi w trudnych warunkach pogodowych, ale zużycie paliwa było wysokie w codziennym użytkowaniu. Celem Mitsubishi było zapewnienie nowemu Outlanderowi takich samych lub lepszych osiągów w ciężkich warunkach, przy minimalnych zmianach w zużyciu paliwa.
Tak pojawił się system napędu na wszystkie koła MITSUBISHI AWC (All Wheel Control). Z angielskiego All Wheel Control dosłownie tłumaczy się jako kontrola wszystkich kół. System ten zapewnia kierowcy wybór rodzaju napędu. System jest zasadniczo połączeniem specjalnej przekładni napędu na wszystkie koła Multi-Select 4WD i elektronicznego rozdziału momentu obrotowego, a oprócz tego nowoczesnej kontroli trakcji i kontroli stabilności. Dzięki systemowi AWC uzyskuje się doskonałą przyczepność kół samochodu do drogi oraz doskonałe prowadzenie na śliskich odcinkach toru. Aby zapewnić optymalną wydajność przekładni, wystarczy wybrać jeden z trzech trybów prezentowanych na konsoli środkowej „2WD”, „4WD” lub „Lock”.
| Tryb jazdy | Opis | Zalety |
| Napęd na 2 koła | Wysyła moment obrotowy na przednie koła | Lepsze zużycie paliwa, mniejszy hałas pojazdu, lepsze prowadzenie. Zachowuje to również możliwość, że jednostka sterująca kieruje moment obrotowy na tylną oś, aby zmniejszyć jej hałas. |
| Auto z napędem na 4 koła | Dozuje kierunek momentu obrotowego na tylne koła w zależności od położenia pedału przyspieszenia i różnicy prędkości przednich i tylnych kół | Optymalny rozkład momentu obrotowego dla danych warunków jazdy. Rozdział momentu obrotowego pomiędzy przednią i tylną oś jest realizowany automatycznie przez jednostkę elektroniczną w zależności od parametrów jazdy pojazdu (prędkość przedniego i tylnego koła, położenie pedału przyspieszenia i prędkość pojazdu). Preferowany jest tryb napędu na 2 koła. |
| Blokada 4WD | Na tylne koła przekazywany jest 1,5 razy większy moment obrotowy niż w trybie 4WD | Zwiększa przyczepność, zapewnia stabilność przy dużych prędkościach i lepszą flotację na nierównych lub śliskich nawierzchniach. Tryb LOCK jest podobny do trybu 4WD, ale ze zmodyfikowanym prawem rozkładu momentu obrotowego między osiami. Przy niskiej prędkości na tylną oś przekazywany jest 1,5 raza większy moment obrotowy, a przy dużej prędkości moment obrotowy rozkłada się równomiernie między osie. |
Dwa tryby jazdy
Auto z napędem na 4 koła
Po wybraniu opcji „4WD Auto” system napędu na cztery koła Outlandera stale przekazuje część momentu obrotowego na tylne koła, automatycznie zwiększając to przełożenie po naciśnięciu pedału gazu. Sprzęgło kieruje do 40% przyczepności na tylne koła przy pełnym otwarciu przepustnicy i zmniejsza ją nawet o 25% przy prędkościach powyżej 40 mil na godzinę. W stałym ruchu z prędkością przelotową do 15% dostępnego momentu obrotowego jest przekazywane na tylne koła. Przy niskich prędkościach w ciasnych zakrętach siła jest zmniejszana, zapewniając płynne pokonywanie zakrętów.
Blokada 4WD
Do jazdy w szczególnie trudnych warunkach, takich jak śnieg, kierowca może wybrać tryb „4WD Lock”. Gdy blokada jest włączona, system nadal automatycznie rozdziela moment obrotowy między przednie i tylne koła, ale większość momentu obrotowego jest przenoszona na tylne koła. Na przykład podczas przyspieszania na wzniesieniu sprzęgło natychmiast przenosi większość momentu obrotowego na tylne koła, aby zapewnić przyczepność wszystkim czterem kołom. Wręcz przeciwnie, automatyczny napęd na cztery koła „na żądanie” najpierw „zaczeka” na poślizg przednich kół, a dopiero potem przekaże moment obrotowy na tylne koła, co może przeszkadzać w przyspieszaniu.
Na suchej nawierzchni tryb 4WD Lock zapewnia efektywne przyspieszenie. Większy moment obrotowy przekazywany jest na tylne koła, co zapewnia większą moc, lepsze prowadzenie podczas przyspieszania na zaśnieżonych lub sypkich drogach oraz lepszą stabilność przy dużych prędkościach. Udział momentu obrotowego na tylnych kołach jest zwiększony o 50% w porównaniu z trybem 4WD, co oznacza, że nawet 60% dostępnego momentu obrotowego jest kierowane na tylne koła, gdy pedał przyspieszenia jest całkowicie wciśnięty na suchej nawierzchni. W trybie 4WD Lock w ciasnych zakrętach moment obrotowy tylnego koła nie jest redukowany w takim samym stopniu, jak podczas jazdy w trybie 4WD Auto.
Stosunek momentu obrotowego do przednich / tylnych kół w trybie 4WD ma następujące wartości:
| Tryb jazdy | sucha droga | zaśnieżona droga | ||
| koła | przód | tył | przód | tył |
| Przyśpieszenie | 69% | 31% | 50% | 50% |
| przy 30 km/godz | przy 30 km/godz | przy 15 km/godz | przy 15 km/godz | |
| 85% | 15% | 64% | 36% | |
| przy 80 km/godz | przy 80 km/godz | przy 40 km/godz | przy 40 km/godz | |
| Stałej prędkości | 84% | 16% | 74% | 26% |
| przy 80 km/godz | przy 80 km/godz | przy 40 km/godz | przy 40 km/godz | |
Schemat strukturalny

Elementy i funkcje systemu
|
Nazwa komponentu |
Funkcjonowanie |
|
|
|
Przesyła następujące sygnały do wymaganego 4WD-ECU przez CAN.
|
|
|
Przełącznik trybu jazdy 2WD/4WD/LOCK |
Przesyła sygnał położenia przełącznika trybu jazdy dla 4WD-ECU. |
|
|
|
System ocenia warunki drogowe i na podstawie sygnałów z każdego ECU, przełącznika trybu jazdy, kieruje wymagany moment obrotowy na tylne koła. Obliczenie optymalnej siły ograniczającej mechanizm różnicowy na podstawie stanu samochodu i aktualnego trybu jazdy na podstawie sygnałów z każdego ECU, przełącznik trybu jazdy steruje wartością prądu dostarczaną do elektronicznego łącza sterującego. |
|
|
Zarządzanie wydajnością (wskaźnik pracy 4WD i wskaźnik blokady) w zestawie wskaźników. |
|
|
Steruje funkcją autodiagnostyki i funkcją przełączania awaryjnego. |
|
|
Kontrola funkcji diagnostycznej (kompatybilna z MUT-III). |
|
|
Elektroniczne sterowanie sprzęgłem |
4WD-ECU wysyła moment obrotowy odpowiadający aktualnej wartości na tylne koła. |
|
Wskaźnik trybu jazdy
|
Wbudowany w zestawie wskaźników wskazuje wybrany tryb przełączania trybu jazdy (nie jest wyświetlany w trybie 2WD).
|
|
Złącze diagnostyczne |
Wyświetla kody diagnostyczne i nawiązuje komunikację z MUT-III. |
Konfiguracja systemu

System kontroli

Schemat okablowania sterowania elektronicznego 4 WD

Projekt


Elektroniczne sterowanie sprzęgłem składa się z obudowy przedniej (obudowa przednia), sprzęgła głównego (sprzęgła głównego), mechanizmu krzywki głównej (krzywki głównej), kuli (kulki), mechanizmu krzywki sterowanej (krzywka pilotująca), twornika (tworu), sprzęgła sterowanego (krzywka pilotująca sprzęgło), obudowa tylna (obudowa tylna), cewka magnetyczna (cewka magnetyczna) i wał (wał).
- Przednia obudowa jest połączona z wałem kardana i obraca się wraz z wałem.
- Przed obudową sprzęgło główne (sprzęgło główne) i sprzęgło sterowane (sprzęgło pilotujące) są osadzone na wale (sprzęgło sterowane) (sprzęgło sterowane (sprzęgło pilotujące) jest instalowane przez ogranicznik krzywki (krzywka pilotująca)).
- Wał jest zazębiony przez zęby z zębnikiem napędowym tylnego mechanizmu różnicowego.
Funkcjonowanie
Sprzęgło odłączone (napęd na 2 koła: cewka magnetyczna odłączona od zasilania).

Siła napędowa ze skrzyni rozdzielczej przez wał napędowy jest przenoszona na przednią obudowę (obudowa przednia). Ponieważ cewka magnetyczna (cewka magnetyczna) jest pozbawiona napięcia, sprzęgło sterowane (sprzęgło pilotujące) i sprzęgło główne (sprzęgło główne) nie są załączone, a siła napędowa nie jest przenoszona na wał (wał) i przekładnię zębatą (napęd koło zębate) tylnego mechanizmu różnicowego.
Sprzęgło działa (4WD: cewki magnetyczne zasilane).

Siła napędowa ze skrzyni rozdzielczej przez wał napędowy jest przenoszona na przednią obudowę (obudowa przednia). Gdy cewka magnetyczna jest zasilana, między tylną obudową, sterowaną przez sprzęgło pilotujące, a twornikiem, powstaje pole magnetyczne. Pole magnetyczne oddziałuje na sterowane sprzęgło (sprzęgło pilotujące) i twornik (twornik) zawiera sprzęgło (sprzęgło pilotujące). Gdy sprzęgło sterowane (sprzęgło pilotujące) jest załączone, siła napędowa jest przenoszona na sterowany mechanizm krzywkowy (krzywka pilotująca). W odpowiedzi na tę siłę kulka (kula) w mechanizmie krzywkowym (krzywka główna) (krzywka pilotująca) cofa się i generuje impuls translacyjny. Impuls ten oddziałuje na sprzęgło główne (sprzęgło główne) i moment obrotowy przekazywany jest na tylne koła poprzez wał i napęd tylnego mechanizmu różnicowego.
Regulując prąd dostarczany do cewki magnetycznej, wielkość siły napędowej przekazywanej na tylne koła można regulować w zakresie od 0 do 100%.



