![]() طیف وسیعی از قطعات نیمه هادی تولید شده توسط این شرکت تگزاس اینسترومنتزآی سی های درایور به طور گسترده ای برای کنترل همه نوع ارائه شده اند موتورهای الکتریکی، که با بهبود یافتن، کاربرد گسترده تری در تجهیزات بسیار متنوعی پیدا می کند. این شرکت راه حل هایی را برای ایجاد درایوهایی ارائه می دهد که در طیف گسترده ای از جریان ها و ولتاژها کار می کنند و عملکرد قابل اعتماد و راحت را تضمین می کنند. گردآورنده,بدون برسو موتورهای پله ایبا طیف کاملی از حفاظت از جریان، ولتاژ و دما.
طیف وسیعی از قطعات نیمه هادی تولید شده توسط این شرکت تگزاس اینسترومنتزآی سی های درایور به طور گسترده ای برای کنترل همه نوع ارائه شده اند موتورهای الکتریکی، که با بهبود یافتن، کاربرد گسترده تری در تجهیزات بسیار متنوعی پیدا می کند. این شرکت راه حل هایی را برای ایجاد درایوهایی ارائه می دهد که در طیف گسترده ای از جریان ها و ولتاژها کار می کنند و عملکرد قابل اعتماد و راحت را تضمین می کنند. گردآورنده,بدون برسو موتورهای پله ایبا طیف کاملی از حفاظت از جریان، ولتاژ و دما.
موتورهای الکتریکی به طور گسترده در روش زندگی مدرن با تکنولوژی بالا استفاده می شود. این نوع درایوهای الکترومکانیکی هنوز هم یکی از رایج ترین و مورد تقاضا هستند. موتورهای الکتریکی برای مقاصد مختلف یکی از اجزای اصلی هر تولیدی هستند که به طور گسترده در لوازم اداری و خانگی، در سیستم های نظارت و کنترل ساختمان ها و تاسیسات استفاده می شود. موتورهای الکتریکی در حمل و نقل مدرن بسیار گسترده هستند. آینده هیجان انگیزتری برای موتورهای الکتریکی در وسایل نقلیه الکتریکی و روبات ها در انتظار است.
با توسعه فناوری، موتورهای سنتی در حال بهبود هستند و زمینه های کاربردی جدیدی پیدا می کنند. ماشین ابزار و رباتیک مدرن با دقت بالا بدون موتورهای الکتریکی با سیستم های کنترل هوشمند غیرقابل تصور است. بر روی زمین، در هوا و زیر آب، موتورهای الکتریکی تبدیل کننده انرژی الکتریکی به انرژی مکانیکی هستند.
انواع موتورهای الکتریکی، روش های کنترل و مشکلات در حال ظهور
برای اولین بار در سال 1834 توسط دانشمند روسی ژاکوبی ایجاد شد، مبدل انرژی الکتریکی به حرکت چرخشی موتور الکتریکی نامیده شد. از آن زمان، به طور جدی بهبود یافته است - بسیاری از گزینه های جدید ظاهر شده اند، اما اصول الکترومغناطیس مورد استفاده در ایجاد آن هنوز اساس تمام اصلاحات موتورهای الکتریکی مدرن است.
هادی با جریانی که از آن می گذرد (شکل 1) میدان مغناطیسی در اطراف خود ایجاد می کند که شدت آن (القای مغناطیسی) متناسب با تعداد چرخش ها در صورت استفاده از سیم پیچ (N) و مقدار آن است. جریان عبوری از آن (I)، جایی که V القاء بردار مغناطیسی، K - ثابت مغناطیسی، N - تعداد چرخش، I - قدرت جریان است.

تغییر جهت جریان بر جهت میدان مغناطیسی هادی نیز تاثیر می گذارد.
در این حالت، نیروی لورنتس بر روی هادی با جریانی که در میدان مغناطیسی خارجی قرار میگیرد، عمل میکند و باعث حرکت چرخشی آن میشود. جهت چرخش به راحتی با استفاده از قانون معروف سمت راست برای رسانایی با جریان در میدان مغناطیسی تعیین می شود (شکل 2). نیروی (F) وارد بر هادی در میدان مغناطیسی برابر است با حاصل ضرب جریان (I) در هادی توسط بردار القای مغناطیسی میدان (B) و طول هادی (L). F = LIB.

موتورهای کلکتور
موتورهای DC براش (Brushed DC یا BDC، در اصطلاح TI) یکی از رایج ترین مکانیسم های چرخش الکترومغناطیسی امروزی هستند.
در میدان مغناطیسی استاتور که از آهنرباهای دائمی مونتاژ شده است، یک روتور چند بخش با سیم پیچ می چرخد که به صورت جفت و به طور متناوب از طریق لایه های جمع کننده کموت شده روی محور روتور به هم متصل می شوند (شکل 3). انتخاب یک جفت کویل فعال شده بر اساس قانون لورنتس مطابق با قاعده گوگ انجام می شود. منبع جریان همیشه به سیم پیچ هایی متصل است که خطوط میدان مغناطیسی آنها با زاویه ای نزدیک به 90 درجه نسبت به میدان مغناطیسی استاتور جابه جا می شوند.

موتورهای الکتریکی از این نوع اغلب از استاتور آهنربای دائمی استفاده می کنند. آنها تنظیم سرعت چرخش را آسان می کنند و گران نیستند.
یک نوع موتور الکتریکی 2 سیم پیچ از این نوع نیز به طور گسترده استفاده می شود، اما با سیم پیچ استاتور به جای آهنربای دائمی. چنین مدل هایی دارای گشتاور راه اندازی زیادی هستند و می توانند نه تنها در جریان مستقیم، بلکه در جریان متناوب نیز کار کنند. موتورهای الکتریکی از این نوع تقریباً به طور جهانی در لوازم خانگی مختلف استفاده می شوند.
از معایب این طرح BDC می توان به سایش مجموعه برس-کلکتور در حین کار اشاره کرد. علاوه بر این، به دلیل جرقه زدن در هنگام تعویض سیم پیچ های روتور، افزایش سطح تداخل الکترومغناطیسی مشاهده می شود که اجازه استفاده از چنین موتورهایی را در محیط های انفجاری نمی دهد.
یکی از ویژگی های موتورهای BDC نیز افزایش گرمایش روتور است که خنک شدن آن به دلیل ویژگی های طراحی موتور دشوار است.
مزایای موتورهای کلکتور:
- کم هزینه؛
- سیستم کنترل ساده؛
- موتورهای کلکتور 2 سیم پیچ با گشتاور بالا و قابلیت کار در AC و DC.
ویژگی های عملکرد موتورهای کلکتور:
- برس ها نیاز به نگهداری دوره ای دارند ، قابلیت اطمینان موتور را کاهش می دهند.
- در طول فرآیند سوئیچینگ، جرقه های الکتریکی و تداخل الکترومغناطیسی رخ می دهد.
- حذف گرما از روتور گرمای بیش از حد دشوار است.
موتورهای براشلس
در میان موتورهای DC، مدلهایی با طراحی بدون جاروبک (BrushLess DC یا BLDC)، که از یک روتور آهنربای دائمی استفاده میکنند که بین الکترومغناطیسهای استاتور میچرخد، تا حدودی کمتر رایج است (شکل 4). جابجایی فعلی در اینجا به صورت الکترونیکی انجام می شود. تغییر سیم پیچ آهنرباهای الکتریکی استاتور، میدان مغناطیسی روتور را مجبور می کند تا میدان خود را دنبال کند.
موقعیت فعلی روتور معمولاً توسط رمزگذارها یا حسگر اثر هال نظارت می شود یا از فناوری برای اندازه گیری ولتاژ back-EMF روی سیم پیچ ها بدون استفاده از سنسور موقعیت روتور جداگانه (SensorLess) استفاده می شود.
کموتاسیون جریان سیم پیچ های استاتور با استفاده از کلیدهای الکترونیکی (شیرها) انجام می شود. به همین دلیل است که موتورهای بدون جاروبک BLDC اغلب به عنوان موتورهای "سوپاپ" شناخته می شوند. دنباله اتصال یک جفت سیم پیچ موتور بسته به موقعیت فعلی روتور رخ می دهد.
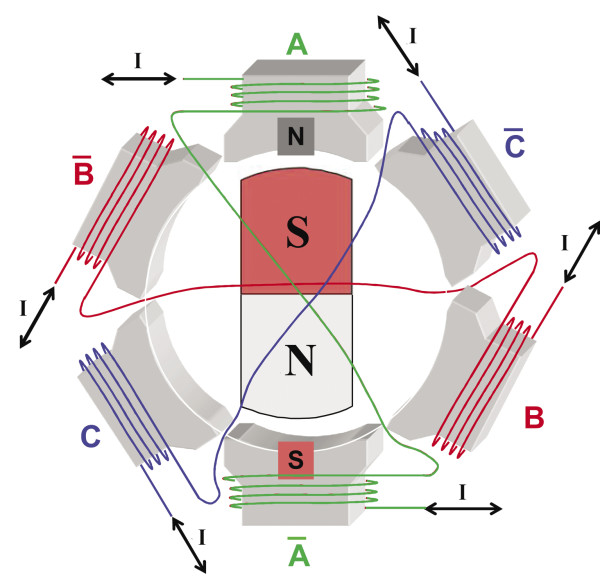
اصل عملکرد BLDC بر این واقعیت استوار است که کنترل کننده سیم پیچ های استاتور را جابجا می کند به طوری که بردار میدان مغناطیسی استاتور همیشه با زاویه ای نزدیک به 90 درجه یا 90- درجه نسبت به بردار میدان مغناطیسی روتور جابه جا می شود. میدان مغناطیسی دوار در حین سوئیچینگ، روتور آهنربای دائمی را وادار به دنبال کردن می کند.
هنگام استفاده از سیگنال کنترل سه فاز، فقط دو جفت سیم پیچ همیشه به منبع جریان متصل می شوند و یکی قطع می شود. در نتیجه ترکیبی از شش حالت به صورت متوالی استفاده می شود (شکل 5).

موتورهای الکتریکی بدون سنسور موقعیت روتور با افزایش قابلیت ساخت فرآیند تولید و هزینه کمتر متمایز می شوند. این طراحی آب بندی سرنخ های اتصال خارجی را ساده می کند.
سنسورهای هال را می توان به عنوان سنسورهای سرعت و موقعیت روتور در BLDC ها استفاده کرد که در هزینه پایین متفاوت هستند، اما وضوح نسبتاً پایینی نیز دارند. افزایش وضوح توسط ترانسفورماتورهای دوار (رزولور) ارائه می شود. آنها گران هستند و نیاز به استفاده از DAC دارند، زیرا سیگنال خروجی آنها سینوسی است. حسگرهای نوری وضوح بالایی دارند، اما قابلیت اطمینان کمتری دارند. شکل 6 سیگنال های خروجی انواع مختلف حسگرها را هنگام چرخش روتور موتور نشان می دهد.

مزایای موتورهای BLDC:
- راندمان بالا؛
- بدون برس برای افزایش قابلیت اطمینان، کاهش هزینه های نگهداری؛
- خطی بودن جریان / گشتاور؛
- اتلاف حرارت ساده شده
ویژگی های استفاده از موتورهای BLDC:
- سیستم کنترل پیچیده تر با بازخورد در مورد موقعیت روتور؛
- موج گشتاور
موتورهای پله ای
موتورهای پله ای (SM) به طور گسترده ای در سیستم های اتوماسیون و کنترل استفاده می شوند. آنها نوع دیگری از موتورهای DC بدون جاروبک هستند. از نظر ساختاری، SM از یک استاتور، که سیمپیچهای میدان روی آن قرار دارند، و یک روتور ساخته شده از مواد مغناطیسی تشکیل شده است. موتورهای پله ای با روتور مغناطیسی امکان گشتاور بیشتر و تثبیت صلب روتور را در هنگام قطع شدن سیم پیچ ها فراهم می کنند.
در فرآیند چرخش، روتور استپر موتور به صورت پلکانی تحت کنترل پالس های قدرتی که به سیم پیچ های استاتور عرضه می شود، حرکت می کند. موتورهای پله ای برای استفاده در درایوهای ماشین ها و مکانیسم هایی که در حالت استارت-استاپ کار می کنند مناسب هستند. دامنه حرکت آنها توسط یک دنباله خاص از تکانه های الکتریکی تنظیم می شود. چنین موتورهایی بسیار دقیق هستند، نیازی به سنسور و مدارهای بازخورد ندارند. زاویه روتور به تعداد ضربه های کنترل اعمال شده بستگی دارد. دقت موقعیت یابی (اندازه گام) به ویژگی های طراحی موتور، نمودار اتصال سیم پیچ ها و ترتیب پالس های کنترل اعمال شده به آنها بستگی دارد.
بسته به پیکربندی نمودار اتصال سیم پیچ، موتورهای پله ای به دو قطبی و تک قطبی تقسیم می شوند. یک موتور دوقطبی در هر یک از دو فاز یک سیم پیچ برای هر دو قطب استاتور دارد که برای تغییر جهت میدان مغناطیسی باید توسط درایور معکوس شود. یک موتور دوقطبی دارای دو سیم پیچ و بر این اساس، چهار پایانه است. برای کنترل چنین موتور پله ای، یک درایور پل یا یک مدار نیم پل با منبع تغذیه 2 قطبی مورد نیاز است. با کنترل دوقطبی، دو سیم پیچ به طور همزمان کار می کنند و گشتاور حدود 40 درصد بیشتر است. شکل 7 توالی سیگنال های کنترلی را در طول چرخش موتور پله ای دوقطبی نشان می دهد.

یک موتور تک قطبی از یک سیم پیچ با یک ترمینال متوسط در هر فاز استفاده می کند و امکان استفاده از یک طرح کنترل ساده تر با یک کلید برای هر یک از چهار نیم سیم پیچ را فراهم می کند.
چهار سیم پیچ SM را می توان در هر دو پیکربندی دو قطبی و تک قطبی استفاده کرد.
هنگامی که جریان از یکی از سیم پیچ ها عبور می کند، روتور تمایل دارد موقعیت خود را به گونه ای تغییر دهد که قطب های مخالف روتور و استاتور در مقابل یکدیگر قرار گیرند. برای چرخش مداوم روتور، سیم پیچ ها به طور متناوب سوئیچ می شوند.
در عمل از راه های مختلفی برای تامین برق چهار سیم پیچ استاتور استفاده می شود. اغلب، یک اتصال دو به دو با حالت عملیات تمام گام یا نیمه مرحله استفاده می شود. در حالت پله کامل، یک روتور دو قطبی که در یک میدان مغناطیسی قابل تغییر متشکل از دو جفت سیم پیچ می چرخد، می تواند چهار موقعیت را اشغال کند (شکل 8).

برای به دست آوردن دقت موقعیت یابی دوبرابر و هشت موقعیت اجازه می دهد تا یک حالت نیمه مرحله ای از عملکرد داشته باشید (شکل 9). برای اجرای آن، یک مرحله میانی با تغذیه همزمان هر چهار سیم پیچ اضافه می شود.

حالت میکرو استپ امکان افزایش قابل توجهی تعداد موقعیت های میانی و دقت موقعیت یابی را فراهم می کند. ایده میکرواستپینگ اعمال یک سیگنال پیوسته به سیمپیچهای یک موتور پلهای به جای پالسهای کنترلی است که شکلی شبیه یک سینوسی پلکانی دارد (شکل 10). در این حالت، مرحله کامل به گام های کوچک کوچک تقسیم می شود و چرخش نرم تر می شود. حالت Microstepping به شما امکان می دهد دقیق ترین موقعیت را بدست آورید. علاوه بر این، در این حالت، لرزش محفظه ذاتی در موتورهای پله ای به میزان قابل توجهی کاهش می یابد.

مزایای موتورهای پله ای:
- هزینه کم به دلیل عدم وجود مدارهای کنترل سرعت چرخش و موقعیت یابی؛
- دقت موقعیت یابی بالا؛
- طیف گسترده ای از سرعت چرخش؛
- رابط کنترل ساده با کنترلرهای دیجیتال.
- قابلیت اطمینان بسیار بالا؛
- لحظه برگزاری خوب
ویژگی های استفاده از موتورهای پله ای:
- SD در پدیده رزونانس ذاتی است.
- به دلیل کمبود بازخورد، ممکن است کنترل موقعیت از بین برود.
- مصرف انرژی حتی در طول عملیات بدون بار کاهش نمی یابد.
- کار با سرعت بسیار بالا دشوار است.
- چگالی توان کم؛
- طرح کنترل نسبتا پیچیده
راه حل های کنترل موتور معمولی
یک سیستم کنترل دقیق موتور DC مدرن شامل یک میکروکنترلر برای پردازش داده ها و یک واحد کنترل قدرت موتور است که اغلب به عنوان درایور شناخته می شود. درایور شامل یک مدار منطقی برای تبدیل پیام های رمزگذاری شده به سیگنال های کنترل دیجیتال است که از آن سیگنال های آنالوگ در بلوک درایور دروازه برای کنترل سوئیچ های قدرت بر اساس ترانزیستورهای اثر میدان (FET) تولید می شود. FET ها را می توان در درایور قرار داد یا در یک بلوک جداگانه قرار داد. علاوه بر این، درایور شامل مدارهای حفاظتی برای مدارهای قدرت و مدارهای بازخورد برای نظارت بر عملکرد موتور است.
شکل 11 گزینه های بلوک دیاگرام را برای یکپارچه و پیش درایور نشان می دهد. هر کدام از راه حل ها مزایا و ویژگی های خاص خود را دارند. Pre-Driver دارای یک رژیم دمای قابل توجه بهبود یافته است، به شما امکان می دهد سوئیچ های برق خارجی را مطابق با قدرت موتور متصل انتخاب کنید. درایور یکپارچه با امکانات کامل، امکان سیستم های کنترل فشرده تر را فراهم می کند، اتصالات خارجی را به حداقل می رساند، اما به طور قابل توجهی تامین دمای مورد نیاز را پیچیده می کند.

بنابراین، برای درایور TI یکپارچه، حداکثر دمای عملیاتی عناصر جداگانه روی برد می تواند به 193 درجه سانتیگراد برسد، در حالی که برای درایور اولیه این رقم از 37 درجه سانتیگراد تجاوز نمی کند.

یکی از رایج ترین مدارها برای سوئیچینگ سیم پیچ موتور، پل نوع "H" است. نام شماتیک با پیکربندی اتصال مرتبط است که شبیه حرف "H" است. این مدار الکترونیکی تغییر جهت جریان در بار و بر این اساس، جهت چرخش روتور را آسان می کند. ولتاژ اعمال شده به سیم پیچ ها از طریق ترانزیستورهای پل می تواند ثابت باشد یا با استفاده از PWM مدوله شود. پل H، اول از همه، برای تغییر قطبیت منبع تغذیه موتور - معکوس (شکل 12) در نظر گرفته شده است، اما همچنین به شما امکان می دهد با اتصال کوتاه سیم پیچ ها، چرخش را کاهش دهید (شکل 13).

مهمترین ویژگی عناصر قدرت پل، که امروزه اغلب به عنوان ترانزیستورهای اثر میدانی با دروازه عایق استفاده می شود، مقدار مقاومت کانال باز بین منبع و تخلیه ترانزیستور - RDSON است. مقدار RDSON تا حد زیادی عملکرد حرارتی واحد و اتلاف انرژی را تعیین می کند. با افزایش دما، RDSON نیز افزایش می یابد و جریان و ولتاژ در سیم پیچ ها کاهش می یابد.
استفاده از سیگنال های کنترل PWM باعث کاهش موج گشتاور می شود و چرخش نرم تر روتور موتور را تضمین می کند. در حالت ایده آل، فرکانس PWM باید بالای 20 کیلوهرتز باشد تا از نویز صوتی جلوگیری شود. اما با افزایش فرکانس، تلفات ترانزیستورهای پل در طول فرآیند سوئیچینگ افزایش می یابد.
با توجه به خواص القایی بار به شکل سیم پیچ، شکل جریان موجود در آن با شکل ولتاژ PWM اعمال شده مطابقت ندارد. پس از اعمال پالس ولتاژ، جریان به تدریج افزایش مییابد و در مکثها به دلیل ظاهر شدن یک EMF برگشتی در سیمپیچها، جریان به تدریج از بین میرود. شیب جریان، دامنه و فرکانس ریپل بر عملکرد موتور (ریپل گشتاور، نویز، قدرت و غیره) تأثیر میگذارد.
برای میرایی تسریع شده در سیمپیچهای موتورهای الکتریکی که توسط اثر جریان برگشتی EMF برانگیخته میشوند، از دیودها در اتصال معکوس استفاده میشود، انتقال منبع تخلیه ترانزیستورها را جدا میکنند، یا سیمپیچها را از طریق انتقال منبع تخلیه دو اتصال کوتاه میکنند. ترانزیستورها به طور همزمان در بازوهای مختلف پل متصل می شوند. شکل 13 سه حالت محور را نشان می دهد: کار، پوسیدگی سریع و پوسیدگی کند.
و موثرترین حالت ترکیبی (تخریب مختلط) است که در آن، در مکث بین پالس های کاری، ابتدا دیودها کار می کنند، منبع تخلیه ترانزیستورها را شنت می کنند و سپس ترانزیستورها در بازوهای پایینی پل قرار می گیرند. روشن شد.
راه حل های کنترل موتور TI
اجزای نیمه هادی TI شامل طیف گسترده ای از درایورهای مختلف برای کنترل موتورهای DC است. همه آنها به حداقل اجزای خارجی نیاز دارند، به شما امکان می دهند راه حل های فشرده ای برای کنترل موتورهای با ولتاژ کاری تا 60 ولت ایجاد کنید، با افزایش قابلیت اطمینان متمایز می شوند و طراحی سریع و آسان سیستم های درایو برای موتورهای الکتریکی را ارائه می دهند.
ویژگیهای هوشمند تعبیهشده در درایورها به حداقل پشتیبانی از یک میکروکنترلر خارجی (MCU) نیاز دارند، قابلیتهای سوئیچینگ پیشرفتهتری را برای سیمپیچها فراهم میکنند، و از حسگرهای خارجی و حلقههای کنترل دیجیتال پشتیبانی میکنند. مجموعه عملکردهای حفاظتی شامل محدود کردن ولتاژ تغذیه، حفاظت در برابر جریان اضافه و اتصال کوتاه، ولتاژ پایین و افزایش دمای کار می باشد.
کل محدوده درایور TI به سه بخش تقسیم می شود: موتورهای DC استپر، برس دار و بدون جاروبک. در هر یک از آنها، وب سایت شرکت دارای یک سیستم انتخاب مناسب برای تعدادی از پارامترها است. درایورهای جداگانه ای برای استفاده با انواع مختلف موتورها وجود دارد.
درایورهای TI Stepper Motor
بخش بزرگی از راه حل های TI برای کنترل موتور شامل درایورهای موتورهای پله ای است (شکل 14) که هم با کلیدهای برق داخلی مبتنی بر FET و هم به صورت درایورهای اولیه تولید می شوند که انتخاب موارد لازم را در اختیار کاربر قرار می دهند. سوئیچ های برق در مجموع، محدوده مدل این شرکت شامل بیش از 35 درایور برای موتورهای پله ای است.

TI طیف گسترده ای از پیشرفته ترین راه حل های کنترل حرکت و موقعیت یابی دقیق را با استفاده از مدارهای کنترل میکرواستپینگ برای ارائه حرکت صاف موتور در طیف وسیعی از ولتاژها و جریان ها ارائه می دهد.
درایورهای جداگانه، با استفاده از یک کنترل کننده اصلی، به شما امکان می دهند دو موتور را همزمان کنترل کنید، و دارای چهار پل داخلی مبتنی بر FET برای این کار است. درایورهایی با FET های داخلی مانند DRV8834 وجود دارند که می توانند برای به حرکت درآوردن دو سیم پیچ یک موتور پله ای وصل شوند یا از همان سیم ها برای به حرکت درآوردن دو موتور DC استفاده کنند (شکل 15).

برای حرکت نرمتر روتور در درایورهای موتور پلهای، از یک مکانیسم قابل تنظیم برای صاف کردن پالسهای جریان استفاده میشود (حالتهای Slow، Fast، Mixed Decay). سیستم محاسبه میکرو استپ می تواند از انواع زیر باشد:
- تعبیه شده در درایور؛
- با استفاده از سیگنال مرجع خارجی
برای درایورهای میکرواستپینگ نیازی به کنترل خارجی نیست , و . در اینجا، گام جابجایی و الگوریتم سوئیچینگ سیم پیچ توسط مدار تعبیه شده در درایور محاسبه می شود.
درایورهای TI برای BDC
برای کنترل - موتورهای کلکتور DC - خانواده خاصی از درایورها در نظر گرفته شده است که تعدادی از نمایندگان آنها در شکل 16 نشان داده شده است. آنها محافظت کامل در برابر اضافه ولتاژ و جریان، اتصال کوتاه و گرمای بیش از حد را ارائه می دهند. به لطف قابلیت های رابط کنترلی، این درایورها عملکرد ساده و کارآمد موتورها را فراهم می کنند. کاربران می توانند از یک تراشه برای کنترل یک یا چند موتور با ولتاژ کاری 1.8 ... 60 ولت استفاده کنند.

درایورهای خانوادگی هم با کلیدهای برق یکپارچه و هم با پیش درایورها در دسترس هستند. آنها به حداقل اجزای اضافی نیاز دارند، راه حل های فشرده ارائه می دهند، زمان توسعه را کاهش می دهند و اجازه می دهند محصولات جدید سریعتر به بازار عرضه شوند.
حالت خواب مصرف انرژی را در حالت بیکار به حداقل می رساند و زمان های بیدار شدن سریع تری را هنگام راه اندازی موتور فراهم می کند. برای کنترل سرعت چرخش، می توان از سیگنال های PWM خارجی یا سیگنال های PHASE / ENABLE برای انتخاب جهت چرخش و روشن کردن کلیدهای پل خروجی استفاده کرد.
با داشتن چهار پل خروجی، راننده قادر است دو موتور پله ای یا یک موتور پله ای و دو BDC یا چهار BDC را با استفاده از رابط کنترل SPI کنترل کند.
شکل 17 بلوک دیاگرام عملکردی یک درایور ساده را برای راندن یک موتور کلکتور تک نشان می دهد.

درایورهای TI BLDC
درایورهای بدون جاروبک TI یا BLDCها می توانند شامل یک پل برق یکپارچه یا از ترانزیستورهای قدرت خارجی باشند. مدار تولید سیگنال های کنترل 3 فاز نیز می تواند خارجی یا داخلی باشد.
خانواده درایور موتورهای براشلس شامل مدل هایی با اصول کنترل متفاوت و با گشتاورهای متفاوت می باشد. این درایورها با ارائه سطوح مختلف نویز برای کنترل BDLC، برای استفاده در تجهیزات صنعتی، سیستم های خودرو و سایر تجهیزات ایده آل هستند. برای اطمینان از عملکرد قابل اعتماد موتورهای الکتریکی، درایورها مجموعه ای جامع از حفاظت از اضافه جریان، اضافه ولتاژ و دما را ارائه می دهند. شکل 18 تنها تعدادی از درایورهای 3 فاز BLDC را در خط تولید گسترده و رو به رشد TI نشان می دهد.

برای نظارت بر موقعیت فعلی روتور دوار می توان از سنسورهای خارجی از انواع مختلف یا یک مدار کنترل با تعیین موقعیت روتور توسط مقدار EMF پشتی (Back Electromotive Force, BEMF) استفاده کرد.
کنترل را می توان با استفاده از PWM، سیگنال های آنالوگ یا رابط های دیجیتال استاندارد انجام داد. مجموعه پارامترهای قابل تنظیم برای کنترل چرخش را می توان در حافظه داخلی غیر فرار ذخیره کرد.
شکل 19 یک درایور هوشمند BLDC را نشان می دهد که در محدوده دمایی وسیع 40 ... 125 درجه سانتیگراد با کلیدهای برق داخلی روی ترانزیستورهای اثر میدانی، با مقاومت کانال باز تنها 250 میلی اهم کار می کند. با محدوده ولتاژ کاری 8 ... 28 ولت، راننده می تواند جریان اسمی 2 آمپر و جریان پیک 3 آمپر را ارائه دهد.

راننده برای نظارت بر موقعیت روتور نیازی به سنسور خارجی ندارد، اما می تواند از یک مقاومت خارجی برای نظارت بر مصرف برق موتور استفاده کند. در حالت آماده به کار تنها 3 میلی آمپر مصرف انرژی دارد. و در مدل، این رقم به سطح 180 μA آورده شده است.
رابط داخلی I2C تشخیص و پیکربندی، دسترسی به رجیسترهای کنترل منطقی و پروفایل های عامل درایور ذخیره شده در EEPROM را فراهم می کند.
مجموعه ای پیشرفته از عملکردهای حفاظتی تضمین می کند که موتور در صورت جریان بیش از حد و ولتاژ پایین متوقف می شود. محدودیت ولتاژ ورودی ارائه شده است. حفاظت در برابر جریان بیش از حد بدون استفاده از مقاومت خارجی کار می کند. روش های استفاده از حفاظت از طریق رجیسترهای ویژه پیکربندی می شوند.
نتیجه
موتورهای الکتریکی کاربرد گستردهتری در طیف گستردهای از تجهیزات پیدا میکنند، بهبود مییابند و فرصتهای جدیدی را عمدتاً به دلیل سیستمهای محرک الکتریکی مدرن به دست میآورند.
در مجموعه قطعات نیمه هادی تولید شده توسط Texas Instruments، آی سی های درایور برای کنترل انواع موتورهای DC وجود دارد. بر اساس آنها، این شرکت راه حل هایی را ارائه می دهد که بسته به نیاز به دقت، قدرت و عملکرد برای ایجاد درایوهایی که در طیف گسترده ای از جریان ها و ولتاژها کار می کنند، مقیاس پذیر هستند و عملکرد قابل اعتماد و راحت موتورهای کلکتور، براشلس و استپر را با طیف کاملی ارائه می دهند. حفاظت از جریان، ولتاژ و دما. ...
درایور استپر موتور ترانزیستور
من درایور یک موتور پله ای دوقطبی روی ترانزیستورهای دوقطبی سری "KT" را به شما معرفی می کنم.
درایور بر اساس اصل پیرو امیتر کار می کند. سیگنال کنترل به مرحله تقویت مونتاژ شده روی ترانزیستور kt315 می رود. پس از آن، از جفت مکمل KT815 و KT 814 به پل H می رسد.
یک مرحله تقویت ضروری است، زیرا توان فعلی در خروجی از میکروکنترلر کافی نیست  باز شدن ترانزیستورهای قدرت بعد از ترانزیستورهای قدرت، دیودهای میرایی خودالقایی موتور نصب می شوند.
باز شدن ترانزیستورهای قدرت بعد از ترانزیستورهای قدرت، دیودهای میرایی خودالقایی موتور نصب می شوند.
این مدار همچنین برای سرکوب تداخل به شکل خازن های 3 تا 0.1 میکروفاراد و 1 تا 100 میکروفاراد فراهم می کند. از آنجایی که درایور برای کار با موتور سی دی 150 وات طراحی شده است، خنک کننده ترانزیستور نیست

استپر موتور از درایو CD متصل به درایور ترانزیستور
نصب شده است، اما حداکثر جریان امیتر ترانزیستورهای KT814 و KT815 1.5 A است که به لطف آن این درایور می تواند موتورها را قدرتمندتر کند. برای این کار، نصب صفحات خنک کننده روی ترانزیستورهای قدرت ضروری است.
- اگرچه موتورهای پله ای دوقطبی نسبتاً گران هستند، اما به دلیل اندازه فیزیکی آنها گشتاور بالایی ارائه می دهند. با این حال، دو سیمپیچ موتور به هشت ترانزیستور کنترلی نیاز دارند که چهار پل H را تشکیل دهند. هر ترانزیستور باید در برابر اضافه بار و اتصال کوتاه مقاومت کند و به سرعت بازیابی شود. و بر این اساس راننده به مدارهای حفاظتی پیچیده با تعداد زیادی اجزای غیرفعال نیاز دارد.

تصویر 1
شکل 1. یک آی سی SMD و چندین قطعه غیرفعال می توانند یک موتور پله ای دوقطبی را هدایت کنند.
کنترل موتور پله ای دوقطبی
درایور استپر موتور DIY- شکل 1 مدار درایور موتور جایگزین را بر اساس تقویت کننده صوتی کلاس D Maxim نشان می دهد. ریزمدار MAX9715 در یک بسته مینیاتوری روی سطح میتواند توانی تا 2.8 وات را به یک بار معمولی 4 یا 8 اهم برساند. هر یک از دو خروجی ریز مدار توسط پل های H از ماسفت های قدرتمند تشکیل می شود که جفت خطوط OUTR +، OUTR- و OUTL +، OUTL- را کنترل می کنند که به ترتیب به سیم پیچ های A و B موتور پله ای متصل می شوند. هر جفت یک سیگنال مدوله شده با عرض پالس دیفرانسیل با فرکانس سوئیچینگ اسمی 1.22 مگاهرتز تولید می کند. سطح پایین نویز تولید شده توسط مدار، نیاز به فیلترهای خروجی را از بین می برد.
جداسازی خازن ها
خازنهای C1، C3، C4 و C6 به عنوان جداکننده برای ورودیهای قدرت و بایاس عمل میکنند، در حالی که C5 و C7 عملکردهای ذخیرهسازی را برای تقویتکنندههای خروجی کلاس D پرقدرت انجام میدهند. خازنهای C8 و C9 پهنای باند تقویتکننده را به 16 هرتز محدود میکنند، در حالی که دانههای فریت L2 و L3 تداخل الکتریکی کابل های بلند را کاهش می دهد. فیلتر U شکل C1، C2، L1 نویز را در ورودی برق ریزمدار IC1 سرکوب می کند. سیگنال های ورودی ریز مدار Step_A و Step_B که به ترتیب کانال های راست و چپ موتور را کنترل می کنند، می توانند توسط هر کنترل کننده مناسبی تولید شوند. مدارهای داخلی تقویت کننده را از اتصال کوتاه و گرمای بیش از حد در صورت خرابی موتور پله یا اتصال نامناسب سیم های آن محافظت می کند.

میز 1
تصویر قطار پالس
جدول 1 دنباله ای از پالس های Step_A و Step_B را نشان می دهد که یک موتور پله ای معمولی را برای چرخش در یک جهت با تامین مداوم ترکیبات سیگنال از 0 تا 4 کنترل می کند. برای تغییر جهت چرخش موتور، شروع به تشکیل یک نمودار زمان بندی پالس ها از پایین جدول کنید و به طور مداوم از طریق آن به سمت بالا حرکت کنید. با اعمال یک ولتاژ سطح منطقی پایین به ورودی SHDN میکرو مدار (پایه 8)، می توانید هر دو کانال تقویت کننده را خاموش کنید. شکل موج در ورودی و خروجی مدار در شکل 2 نشان داده شده است.
مقدمه ای کوتاه بر تئوری و انواع درایورها، نکاتی برای انتخاب درایور بهینه برای موتور پله ای.
اگر شما می خواهیدخرید درایور استپر موتور ، روی خبر دهنده در سمت راست کلیک کنید
برخی اطلاعات که ممکن است به شما کمک کند درایور استپر موتور را انتخاب کنید.
موتور پله ای موتوری با یک مدار کنترل پیچیده است که به یک دستگاه الکترونیکی خاص - یک درایور موتور پله ای نیاز دارد. درایور استپر موتور سیگنال های منطقی STEP / DIR را در ورودی دریافت می کند که معمولاً با ولتاژ مرجع بالا و پایین 5 ولت نشان داده می شود و مطابق با سیگنال های دریافتی، جریان در سیم پیچ های موتور را تغییر می دهد و باعث می شود شفت در یک زاویه مشخص در جهت مربوطه بچرخید. > سیگنال های STEP / DIR توسط یک کنترلر CNC یا رایانه شخصی که یک برنامه کنترلی مانند Mach3 یا LinuxCNC را اجرا می کند، تولید می شود.
وظیفه راننده تغییر جریان در سیم پیچ ها تا حد امکان بهینه است و از آنجایی که اندوکتانس سیم پیچ ها و روتور استپر موتور هیبریدی دائماً در این فرآیند دخالت می کنند، درایورها از نظر خصوصیات و ویژگی های خود بسیار با یکدیگر متفاوت هستند. کیفیت حرکت حاصل جریان جاری در سیم پیچ ها حرکت روتور را تعیین می کند: بزرگی جریان گشتاور را تعیین می کند ، دینامیک آن بر یکنواختی تأثیر می گذارد و غیره.
انواع (انواع) درایورهای استپر موتور
درایورها با توجه به روش تزریق جریان به سیم پیچ ها به چند نوع تقسیم می شوند:
1) درایورهای ولتاژ ثابت
این درایورها یک سطح ولتاژ ثابت را به طور متناوب روی سیم پیچ ها اعمال می کنند، جریان حاصل به مقاومت سیم پیچ و در سرعت های بالا به اندوکتانس نیز بستگی دارد. این درایورها بسیار ناکارآمد هستند و فقط در سرعت های بسیار پایین قابل استفاده هستند.
2) درایورهای دو سطحی
در درایورهایی از این نوع، ابتدا جریان سیم پیچ با استفاده از ولتاژ بالا تا حد مورد نظر بالا می رود، سپس منبع فشار قوی خاموش می شود و جریان مورد نیاز توسط منبع ولتاژ پایین حفظ می شود. چنین درایورهایی کاملاً مؤثر هستند، از جمله، گرمایش موتورها را کاهش می دهند و هنوز هم گاهی اوقات می توان آنها را در تجهیزات پیشرفته یافت. با این حال، چنین درایورهایی فقط از حالت های مرحله ای و نیمه گامی پشتیبانی می کنند.
3) درایورهای دارای PWM.
در حال حاضر، درایورهای موتور پله ای PWM محبوب ترین هستند، تقریباً همه درایورهای موجود در بازار از این نوع هستند. این درایورها یک سیگنال PWM ولتاژ بسیار بالا را به سیم پیچ استپر موتور اعمال می کنند که با رسیدن جریان به سطح مورد نیاز قطع می شود. مقدار جریانی که توسط آن قطع می شود یا توسط یک پتانسیومتر یا یک سوئیچ DIP تنظیم می شود، گاهی اوقات این مقدار با استفاده از نرم افزار خاصی برنامه ریزی می شود. این درایورها کاملاً هوشمند هستند و به بسیاری از عملکردهای اضافی مجهز هستند، از تقسیمات زمینی مختلف پشتیبانی می کنند، که امکان افزایش وضوح موقعیت و نرمی حرکت را فراهم می کند. با این حال، درایورهای PWM نیز کاملاً با یکدیگر متفاوت هستند. علاوه بر ویژگی هایی مانند ولتاژ تغذیه و حداکثر جریان سیم پیچ، فرکانس PWM متفاوتی دارند. اگر فرکانس درایور بیشتر از 20 کیلوهرتز باشد بهتر است و در کل هر چه بیشتر باشد بهتر است. فرکانسهای زیر 20 کیلوهرتز ویژگیهای عملکرد موتورها را بدتر میکنند و در محدوده قابل شنیدن قرار میگیرند، موتورهای پلهای شروع به انتشار یک صدای ناخوشایند میکنند. به دنبال خود موتورها، درایورهای استپر موتور به دو قطبی و دوقطبی تقسیم می شوند. به سازندگان ماشین ابزار مبتدی اکیداً توصیه می شود که درایوها را آزمایش نکنند، بلکه آنهایی را انتخاب کنند که می توانید حداکثر پشتیبانی فنی، اطلاعات و محصولاتی را انتخاب کنند که برای آنها بیشترین تعداد در بازار ارائه شده است. اینها درایورهای موتور پله ای هیبریدی دوقطبی هستند.
نحوه انتخاب یک درایور استپر موتور (SM)
پارامتر اولیکی از مواردی که هنگام انتخاب یک درایور استپر موتور باید به آن توجه کنید، آمپری است که راننده می تواند ارائه دهد. به عنوان یک قاعده، در یک محدوده نسبتاً گسترده تنظیم می شود، اما اگر راننده نیاز به انتخاب داشته باشد که بتواند جریانی برابر با جریان فاز موتور پله انتخاب شده ارائه دهد. البته مطلوب است که حداکثر جریان درایور 15-40٪ بیشتر باشد. از یک طرف، در صورتی که بخواهید گشتاور بیشتری از موتور دریافت کنید، یا در آینده موتور قدرتمندتری قرار دهید، حاشیه ای ایجاد می کند، از سوی دیگر، اضافی نخواهد بود: سازندگان گاهی اوقات "تنظیم" می کنند. رتبه بندی قطعات الکترونیکی برای نوع/اندازه خاصی از موتورها بنابراین، برای مثال، یک درایور بسیار قدرتمند 8 آمپری که موتور NEMA 17 (42 میلی متر) را هدایت می کند، ممکن است باعث لرزش بیش از حد شود.
لحظه دومولتاژ تغذیه است. یک پارامتر بسیار مهم و بحث برانگیز. تأثیر آن کاملاً چند وجهی است - ولتاژ تغذیه بر دینامیک (گشتاور در سرعت های بالا)، لرزش، گرمایش موتور و راننده تأثیر می گذارد. به طور معمول، حداکثر ولتاژ تغذیه درایور تقریباً برابر با حداکثر جریانی است که من در 8-10 ضرب کردم. اگر حداکثر ولتاژ تغذیه نشان داده شده درایور به شدت با این مقادیر متفاوت است، باید بپرسید دلیل این تفاوت چیست. هر چه اندوکتانس موتور بیشتر باشد، ولتاژ بیشتری برای درایور مورد نیاز است. یک فرمول تجربی U = 32 * sqrt (L) وجود دارد، که در آن L اندوکتانس سیم پیچ استپر موتور است. مقدار U به دست آمده از این فرمول بسیار تقریبی است، اما به شما امکان می دهد هنگام انتخاب یک درایور پیمایش کنید: U باید تقریباً برابر با حداکثر مقدار ولتاژ منبع تغذیه درایور باشد. اگر U برابر با 70 دریافت کردید، درایورهای EM706، AM882، YKC2608M-H طبق این معیار عبور می کنند.
جنبه سوم- وجود ورودی های اپتو ایزوله. تقریباً در تمام درایورها و کنترلکنندههای تولید شده در کارخانهها، بهویژه آنهایی که دارای مارک تجاری هستند، جداسازی اپتو ضروری است، زیرا درایور یک دستگاه الکترونیکی قدرت است و خرابی کلید میتواند منجر به یک ضربه قوی بر روی کابلها شود که از طریق آن سیگنالهای کنترلی تامین میشود. فرسودگی یک کنترلر CNC گران قیمت با این حال، اگر تصمیم به انتخاب یک درایور موتور پله ای از یک مدل ناآشنا دارید، باید در مورد وجود جداسازی نوری ورودی ها و خروجی ها نیز جویا شوید.
جنبه چهارم- وجود مکانیسم هایی برای سرکوب رزونانس. رزونانس یک موتور پله ای پدیده ای است که همیشه خود را نشان می دهد ، تفاوت فقط در فرکانس تشدید است که در درجه اول به لحظه اینرسی بار ، ولتاژ تغذیه راننده و قدرت جریان تنظیم شده فاز موتور بستگی دارد. هنگامی که رزونانس رخ می دهد، استپر موتور شروع به ارتعاش می کند و گشتاور خود را از دست می دهد تا زمانی که شفت به طور کامل متوقف شود. برای سرکوب رزونانس، از الگوریتمهای جبران رزونانس میکرو استپ و داخلی استفاده میشود. روتور استپر موتور که در رزونانس نوسان می کند، نوسانات ریز EMF القایی را در سیم پیچ ها ایجاد می کند و با توجه به ماهیت و دامنه آنها، راننده تعیین می کند که آیا رزونانس وجود دارد یا خیر. بسته به داده های دریافتی، راننده کمی مراحل موتور را در زمان نسبت به یکدیگر تغییر می دهد - چنین ناهمواری مصنوعی رزونانس را خنثی می کند. لغو تشدید در همه درایورهای سری Leadshine DM، AM و EM تعبیه شده است. درایورهای رزونانس سرکوب شده درایورهای باکیفیتی هستند و اگر بودجه اجازه می دهد بهتر است از اینها استفاده کنید. با این حال، حتی بدون این مکانیسم، راننده کاملاً یک دستگاه کار می ماند - بخش عمده ای از درایورهای فروخته شده - بدون جبران رزونانس، و با این وجود ده ها هزار ماشین ابزار بدون مشکل در سراسر جهان کار می کنند و وظایف خود را با موفقیت انجام می دهند.
جنبه پنجم- بخش پروتکل باید مطمئن شوید که درایور مطابق پروتکل مورد نیاز شما کار می کند و سطوح سیگنال ورودی با سطوح منطقی مورد نیاز شما سازگار است. این بررسی پنجمین نکته است، زیرا به استثنای موارد نادر اکثریت قریب به اتفاق درایورها طبق پروتکل STEP / DIR / ENABLE کار می کنند و با سطح سیگنال 0..5 ولت سازگار هستند، فقط باید مطمئن شوید که در هر صورت.
جنبه ششم- وجود عملکردهای حفاظتی. از جمله آنها محافظت در برابر بیش از ولتاژ تغذیه، جریان سیم پیچ (از جمله اتصال کوتاه سیم پیچ ها)، در برابر معکوس شدن قطبیت ولتاژ تغذیه، در برابر اتصال نادرست فازهای استپر موتور است. هر چه تعداد این توابع بیشتر باشد، بهتر است.
جنبه هفتم- وجود حالت های میکرواستپینگ. در حال حاضر تقریبا هر راننده دارای انواع حالت های میکرو استپینگ است. با این حال، برای هر قانون استثنا وجود دارد، و تنها یک حالت در درایورهای Geckodrive وجود دارد - بخش های مرحله 1/10. دلیل این امر این است که تقسیم بیشتر دقت بیشتری را به همراه ندارد، به این معنی که لازم نیست. با این حال، تمرین نشان می دهد که میکرواستپینگ با افزایش گسستگی یا دقت موقعیت یابی به هیچ وجه مفید نیست، بلکه به این دلیل است که هرچه تقسیم پله بزرگتر باشد، حرکت شفت موتور نرمتر و رزونانس کمتری دارد. بر این اساس، در صورت مساوی بودن همه چیزهای دیگر، ارزش استفاده از تقسیم را دارد، هر چه بیشتر، بهتر. حداکثر تقسیم گام مجاز نه تنها با جداول Bradis تعبیه شده در درایور، بلکه با حداکثر فرکانس سیگنال های ورودی نیز تعیین می شود - به عنوان مثال، برای راننده ای با فرکانس ورودی 100 کیلوهرتز، استفاده از آن بی معنی است. تقسیم 1/256، زیرا سرعت چرخش به 100000 / (200 * 256) * 60 = 117 دور در دقیقه محدود می شود، که برای یک موتور پله ای بسیار کوچک است. علاوه بر این، رایانه شخصی در تولید سیگنال با فرکانس بیش از 100 کیلوهرتز نیز مشکل دارد. اگر قصد استفاده از یک کنترلر سخت افزاری CNC را ندارید، به احتمال زیاد 100 کیلوهرتز سقف شما خواهد بود که با تقسیم 1/32 مطابقت دارد.
جنبه هشتم- در دسترس بودن توابع اضافی می تواند بسیاری از آنها وجود داشته باشد، به عنوان مثال، عملکرد تشخیص "ایستادگی" - توقف ناگهانی شفت هنگام گیر کردن یا عدم وجود گشتاور در موتور پله، خروجی برای نشان دادن خطاهای خارجی و غیره. همه آنها غیر ضروری هستند، اما می توانند هنگام ساخت یک ماشین زندگی را بسیار آسان تر کنند.
نهمین و مهمترین جنبه- کیفیت درایور عملاً ربطی به خصوصیات و غیره ندارد. پیشنهادات زیادی در بازار وجود دارد و گاهی اوقات مشخصات درایورهای دو سازنده تقریباً با کاما منطبق می شود و با نصب آنها به نوبه خود بر روی دستگاه مشخص می شود که یکی از سازندگان به وضوح کار خود را انجام نمی دهد. ، و در تولید آهن های ارزان قیمت اقبال بیشتری خواهد داشت. تعیین سطح درایور از قبل با استفاده از برخی داده های غیر مستقیم برای یک مبتدی بسیار دشوار است. می توانید سعی کنید تعدادی از ویژگی های هوشمند مانند تشخیص استال یا سرکوب تشدید را هدف قرار دهید یا از روش اثبات شده هدف قرار دادن مارک ها استفاده کنید.
موتورهای پله ای از این جهت جالب هستند که به شما امکان می دهند شفت را در یک زاویه خاص بچرخانید. بر این اساس، با کمک آنها می توانید شفت را با تعداد دور معینی بچرخانید، زیرا دورهای N نیز زاویه مشخصی برابر با 360 * N است و به ویژه با تعداد دورهای غیر صحیح، به عنوان مثال، با 0.75 دور، 2.5 دور، در گردش 3.7، و غیره. این قابلیت های موتورهای پله ای محدوده کاربرد آنها را مشخص می کند. آنها عمدتاً برای موقعیت یابی دستگاه های مختلف استفاده می شوند: هدهای خواندنی در درایوهای دیسک، هدهای چاپی در چاپگرها و پلاترها و غیره.
طبیعتا چنین فرصت هایی از سوی آماتورهای رادیویی قابل چشم پوشی نبود. آنها با موفقیت از shagovik در طراحی ربات های خانگی، ماشین های CNC خانگی و غیره استفاده می کنند. در زیر نتایج آزمایشهای من با موتور پلهای است، امیدوارم برای کسی مفید باشد.
بنابراین، آنچه ما برای آزمایش نیاز داریم. اول، استپر موتور. من یک استپر دوقطبی چینی 5 ولتی با نامی مرموز گرفتم که از یک فلاپی درایو قدیمی 3.5 اینچی، آنالوگ M20SP-GW15 جدا شده بود. mA)، کاملاً قابل درک است که امکان اتصال مستقیم استپر به کنترلر وجود نخواهد داشت، به درایور نیاز دارید.
به عنوان یک درایور برای موتورهای پله ای دوقطبی، معمولاً از یک مدار به اصطلاح H-bridge یا یک میکرو مدار خاص (که به هر حال پل H در آن تعبیه شده است) استفاده می شود. البته می توانید خود را مجسمه سازی کنید، اما من یک میکروهو (LB1838) آماده از همان درایو قدیمی گرفتم. در واقع، علاوه بر همه موارد فوق، آزمایشهای ما به این موارد نیز نیاز دارند: یک کنترلکننده PIC (PIC12F629 به عنوان ارزانترین کنترلکننده در نظر گرفته شد) و چند دکمه.
قبل از اینکه مستقیماً به نمودار بروید، بیایید کمی نظریه را درک کنیم.
موتور پله ای دوقطبی دارای دو سیم پیچ است و بر این اساس از طریق چهار سیم متصل می شود. می توانید انتهای سیم پیچ ها را با یک تداوم ساده پیدا کنید - انتهای سیم های مربوط به یک سیم پیچ در بین خود حلقه می زنند، اما انتهای مربوط به سیم پیچ های مختلف صدا نمی زنند. انتهای سیم پیچ اول با حروف "الف"، "ب" و انتهای سیم پیچ دوم با حروف "ج"، "د" مشخص می شود.
روی نمونه مورد نظر یک علامت دیجیتالی از مخاطبین نزدیک موتور و علامت رنگی سیم ها وجود دارد (خدا می داند، شاید این نیز نوعی استاندارد باشد): 1 - قرمز، 2 - آبی - سیم پیچ اول؛ 3 - زرد، 4 - سفید - سیم پیچ دوم.
برای اینکه موتور پله ای دوقطبی بچرخد، سیم پیچ ها باید به ترتیب نشان داده شده در جدول برق داده شوند. اگر جهت پیمایش جدول از بالا به پایین به صورت دایره ای انتخاب شود، موتور به جلو می چرخد، اگر از پایین به بالا به صورت دایره ای باشد، موتور به سمت عقب می چرخد:
در یک چرخه کامل، موتور چهار مرحله انجام می دهد.
برای عملکرد صحیح، دنباله سوئیچینگ نشان داده شده در جدول باید به شدت رعایت شود. به عنوان مثال، پس از ترکیب دوم (زمانی که + را به ترمینال "c" و منهای را به ترمینال "d" اعمال کردیم) می توانیم ترکیب سوم را اعمال کنیم (سیم پیچ دوم را خاموش کنیم و روی اولی - به "a" و + به "b")، سپس موتور یک قدم به جلو می چرخد، یا اولین ترکیب (موتور یک قدم به عقب برمی گردد).
ترکیبی که چرخش باید با آن شروع شود با آخرین ترکیبی که قبل از خاموش کردن موتور به موتور داده شده است (مگر اینکه با دست چرخانده شده باشد) و جهت چرخش مورد نظر تعیین می شود.
یعنی فرض کنید موتور را 5 قدم به جلو چرخاندیم، ترکیبات 2-3-4-1-2 را تغذیه کردیم، سپس برق را قطع کردیم و بعد خواستیم یک قدم دیگر به جلو برگردیم. برای این کار باید ترکیب 3 روی سیم پیچ ها اعمال شود، فرض کنید بعد از آن دوباره آن را خاموش کردیم و بعد از مدتی می خواستیم آن را 2 قدم به عقب برگردانیم، سپس باید ترکیب 2-1 را به موتور تغذیه کنیم. . و غیره با همین روحیه.
این جدول، در میان چیزهای دیگر، به ما اجازه می دهد تا تخمین بزنیم که اگر ترتیب اتصال سیم پیچ ها یا انتهای سیم پیچ ها را اشتباه بگیریم، با موتور پله ای چه اتفاقی می افتد.
این کار موتور را کامل می کند و به سمت درایور LB1838 حرکت می کند.
این میکروهی دارای چهار پایه کنترلی (IN1, IN2, EN1, EN2) است که فقط سیگنالهای کنترلر را به آن ارسال میکنیم و چهار پایه خروجی (Out1, Out2, Out3, Out4) که سیمپیچهای موتور به آن وصل میشوند. سیم پیچ ها به صورت زیر متصل می شوند: سیم "a" به Out1، سیم "b" به Out2، سیم "c" به Out3، سیم "d" به Out4 متصل می شود.
در زیر جدول حقیقت برای ریز مدار راننده (وضعیت خروجی ها بسته به وضعیت ورودی ها) آمده است:
| در 1 | EN1 | خروجی 1 (الف) | خروجی 2 (ب) | در 2 | EN2 | خروجی 3 (ج) | خروجی 4 (د) |
| کم | بالا | + | — | کم | بالا | + | — |
| بالا | بالا | — | + | بالا | بالا | — | + |
| ایکس | کم | خاموش | خاموش | ایکس | کم | خاموش | خاموش |
حالا بیایید روی نمودار رسم کنیم که سیگنال های IN1، EN1، IN2، EN2 برای یک چرخه کامل چرخش (4 مرحله) چه شکلی باید داشته باشند، یعنی. به طوری که هر 4 ترکیب اتصال سیم پیچ ها به صورت متوالی در خروجی ها ظاهر می شوند:

اگر به این نمودار (سمت چپ) دقت کنید، مشخص میشود که سیگنالهای IN1 و IN2 را میتوان دقیقاً یکسان ساخت، یعنی سیگنال یکسانی را میتوان به هر دوی این پاها اعمال کرد. در این حالت نمودار ما به صورت زیر خواهد بود:

بنابراین، آخرین نمودار نشان می دهد که چه ترکیبی از سطوح سیگنال باید در ورودی های کنترل راننده (EN1، EN2، IN1، IN2) باشد تا ترکیبات مناسب اتصال سیم پیچ های موتور را به دست آورد و فلش ها ترتیب تغییر این ترکیب ها را نشان می دهد. برای اطمینان از چرخش در سمت مورد نظر.
یعنی به طور کلی کل نظریه. ترکیبات مورد نیاز سطوح در ورودی های کنترل توسط کنترل کننده تشکیل می شود (ما از PIC12F629 استفاده خواهیم کرد).
طرح:
دستگاه آماده:


برنامه کنترل الگوریتم زیر را پیاده سازی می کند: هنگامی که دکمه KH1 فشار داده می شود، موتور یک پله در یک جهت می چرخد و هنگامی که دکمه KH2 فشار داده می شود، یک قدم در جهت دیگر می چرخد.
در واقع، می توانید آن را در اینجا پیچ کنید و کنترل را از رایانه پیاده سازی کنید (سرعت، تعداد مراحل و جهت چرخش را از رایانه منتقل کنید).