Tranzisztoros léptetőmotor meghajtó
Bemutatom a figyelmébe a „KT” sorozatú bipoláris tranzisztorokon alapuló bipoláris léptetőmotor meghajtót.
A meghajtó az emitter követő elven működik. A vezérlőjel a KT315 tranzisztorra szerelt erősítő fokozatba kerül. Ezután a KT815 és KT 814 komplementer párja érinti az É hidat.
Erősítő fokozatra van szükség, mert a mikrokontroller áramkimenete nem elegendő  nyitó teljesítménytranzisztorok. A teljesítménytranzisztorok után diódákat szerelnek fel a motor önindukciójának csillapítására.
nyitó teljesítménytranzisztorok. A teljesítménytranzisztorok után diódákat szerelnek fel a motor önindukciójának csillapítására.
Az áramkör zajelnyomást is biztosít 3 × 0,1 μF és 1 × 100 μF kondenzátorok formájában. Mivel az illesztőprogramot 150 wattos CD-meghajtó motorral való használatra tervezték, a tranzisztoros hűtés nem

Léptetőmotor egy tranzisztoros meghajtóhoz csatlakoztatott CD-meghajtóról
telepítve, de maximális áramerősség A KT814 és KT815 tranzisztorok emitterfeszültsége 1,5 A, aminek köszönhetően ez a meghajtó még erősebb motorokat tud forgatni. Ehhez hűtőlemezeket kell felszerelni a teljesítménytranzisztorokra.
A cikk előírja kapcsolási rajzok opciók egy egyszerű, olcsó léptetőmotor-vezérlőhöz és rezidenshez szoftver(firmware) hozzá.
Általános leírása.
A léptetőmotor-vezérlőt a PIC12F629 PIC vezérlőn fejlesztették ki. Ez egy 8 tűs mikrokontroller, amely mindössze 0,5 dollárba kerül. Az egyszerű kialakítás ellenére és alacsony költségű alkatrészeket, a vezérlő eléggé biztosítja nagy teljesítményűés széles körű funkcionalitás.
- A vezérlő áramköri opciókkal rendelkezik az unipoláris és a bipoláris léptetőmotorok vezérlésére.
- A motor fordulatszámának széles tartományban történő beállítását teszi lehetővé.
- Két léptetőmotoros vezérlési móddal rendelkezik:
- teljes lépés;
- fél lépés.
- Előre és hátra forgást biztosít.
- Az üzemmódok, paraméterek beállítása és a vezérlő vezérlése két gombbal és egy BE jellel (bekapcsolás) történik.
- Ha a tápellátást kikapcsolják, az összes mód és paraméter a vezérlő nem felejtő memóriájába kerül, és bekapcsoláskor nincs szükség alaphelyzetbe állításra.
A vezérlő nem rendelkezik védelemmel a motor tekercseinek rövidzárlatával szemben. De ennek a funkciónak a megvalósítása jelentősen bonyolítja az áramkört, és a tekercsek rövidre zárása rendkívül ritka eset. Én még nem találkoztam ilyesmivel. Ezenkívül a léptetőmotor tengelyének forgás közbeni mechanikus leállítása nem okoz veszélyes áramokat, és nem igényel vezető védelmet.
Olvashat a léptetőmotor vezérlési módjairól, módszereiről, a búvárokról.
Vezérlőáramkör unipoláris léptetőmotorhoz bipoláris tranzisztoros meghajtóval.

A diagramon nincs semmi különösebb magyarázat. NAK NEK PIC vezérlő csatlakoztatva:
- a „+” és „–” gombok (a komparátor analóg bemenetén keresztül);
- BE jel (a motor bekapcsolása);
- meghajtó (VT1-Vt4 tranzisztorok, VD2-VD9 védődiódák).
A PIC belső órajelgenerátort használ. A módok és a paraméterek a belső EEPROM-ban tárolódnak.
A KT972 bipoláris tranzisztorokon alapuló meghajtó áramkör legfeljebb 2 A kapcsolási áramot, 24 V tekercsfeszültséget biztosít.
A vezérlőt egy 45 x 20 mm-es kenyérlapra forrasztottam.

Ha a kapcsolási áram nem haladja meg a 0,5 A-t, használhatja a BC817 sorozatú tranzisztorokat a SOT-23 csomagokban. A készülék egészen miniatűr lesz.
Szoftver- és vezérlőkezelés.
A rezidens szoftver assembly nyelven készült, minden regiszter ciklikus visszaállításával. A program elvileg nem tud lefagyni. Letölthet szoftvert (firmware-t) a PIC12F629-hez.
A vezérlő vezérlése meglehetősen egyszerű.
- Amikor az "ON" jel aktív (zárva a földhöz), a motor forog, amikor inaktív (leszakadt a talajról), akkor leáll.
- Amikor a motor jár (az ON jel aktív), a „+” és „–” gombok megváltoztatják a forgási sebességet.
- A „+” gomb minden egyes megnyomása minimális lépésekkel növeli a sebességet.
- A „–” gomb megnyomása csökkenti a sebességet.
- Ha lenyomva tartja a „+” vagy „–” gombot, a forgási sebesség simán növekszik vagy csökken másodpercenként 15 lépéssel.
- Amikor a motor leáll (az ON jel nem aktív).
- A "+" gomb megnyomásával a forgási mód előrefelé állítható.
- A „–” gomb megnyomásával a vezérlő fordított forgásmódba kerül.
- Az üzemmód – teljes vagy féllépéses – kiválasztásához tartsa lenyomva a „–” gombot, miközben áram alá helyezi a vezérlőt. A motorvezérlési mód másikra változik (fordított). Elegendő 0,5 másodpercig lenyomva tartani a gombot.
Vezérlőáramkör unipoláris léptetőmotorhoz MOSFET tranzisztorokon alapuló meghajtóval.

Az alacsony küszöbű MOSFET tranzisztorok lehetővé teszik magasabb paraméterű meghajtó létrehozását. A MOSFET tranzisztorok, például az IRF7341 használata a meghajtóban a következő előnyökkel jár.
- Tranzisztor ellenállás be nyitott állapot nem több, mint 0,05 Ohm. Ez alacsony feszültségesést jelent (0,1 V 2 A áramerősségnél), a tranzisztorok nem melegednek fel, és nem igényelnek hűtőradiátorokat.
- A tranzisztor árama 4 A-ig.
- Feszültség 55 V-ig.
- Egy 8 tűs SOIC-8 csomagban 2 tranzisztor található. Azok. A meghajtó megvalósításához 2 miniatűr tokra lesz szükség.
Ilyen paraméterek nem érhetők el bipoláris tranzisztorokkal. 1 A feletti kapcsolási áramok esetén erősen ajánlom a MOSFET tranzisztorokat használó készülék opciót.
Csatlakozás az unipoláris léptetőmotorok vezérlőjéhez.
Az 5, 6 és 8 vezetékes tekercsezéssel rendelkező motorok unipoláris üzemmódban működhetnek.
Egypólusú léptetőmotor kapcsolási rajza 5 és 6 vezetékkel (vezetékekkel).

Az FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH motoroknál 6 vezetékes tekercselés konfigurációval a sorkapcsok a következő színekkel vannak jelölve.

Az 5 vezetékes konfiguráció olyan opció, amelyben a közös tekercsvezetékek a motor belsejébe vannak csatlakoztatva. Vannak ilyen motorok. Például PM35S-048.

PM35S-048 léptetőmotor dokumentációja be PDF formátum letölthető.
Bekötési rajz egy unipoláris léptetőmotorhoz 8 vezetékkel (vezetékekkel).
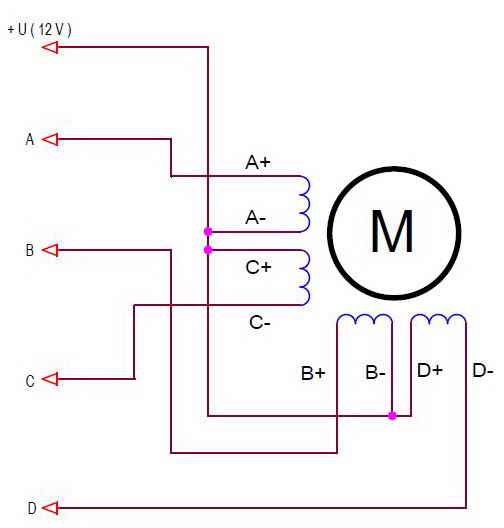
Ugyanúgy, mint az előző opciónál, csak az összes tekercscsatlakozás történik a motoron kívül.
Hogyan válasszuk ki a feszültséget a léptetőmotorhoz.
Ohm törvénye szerint a tekercsellenálláson keresztül ill megengedett áramerősség fázisok.
U = Iphase * Tekercselés
Az egyenáramú tekercs ellenállása mérhető, de az áramerősséget a referencia adatok között kell keresni.
Ezt szeretném hangsúlyozni arról beszélünk egyszerű meghajtókról, amelyek nem biztosítanak bonyolult áram- és feszültséghullámformákat. Ezeket a módokat a rendszer használja nagy sebességek forgás.
Hogyan határozható meg a léptetőmotorok tekercselése, ha nincs referenciaadat.
Az 5 és 6 kivezetéses unipoláris motoroknál a középső kapocs a tekercsek ellenállásának mérésével határozható meg. A fázisok között az ellenállás kétszer akkora lesz, mint a középső kivezetés és a fázis között. A középső kivezetések a tápegység pozitív csatlakozójához csatlakoznak.
Ekkor bármelyik fázistüske hozzárendelhető A fázisnak. 8 lehetőség lesz az érintkezők átkapcsolására. Kiválaszthatod őket. Ha figyelembe vesszük, hogy a B fázis tekercsének más középső vezetéke van, akkor a lehetőségek még kevesebbek lesznek. A fázistekercsek illeszkedése nem vezet a meghajtó vagy a motor meghibásodásához. A motor zörög és nem fordul fel.
Ne feledje, hogy a túl magas forgási sebesség (nem szinkronizálva) ugyanazt a hatást eredményezi. Azok. A forgási sebességet szándékosan alacsonyra kell állítani.
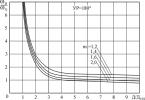
Bipoláris léptetőmotor-vezérlő kapcsolási rajza L298N integrált meghajtóval.
A bipoláris mód két előnnyel rendelkezik:
- szinte bármilyen tekercskonfigurációjú motor használható;
- A nyomaték körülbelül 40%-kal nő.
Egy bipoláris meghajtó áramkör létrehozása diszkrét elemek felhasználásával hálátlan feladat. Könnyebb az L298N integrált illesztőprogram használata. Van egy leírás oroszul.
A vezérlő áramkör az L298N bipoláris meghajtóval így néz ki.
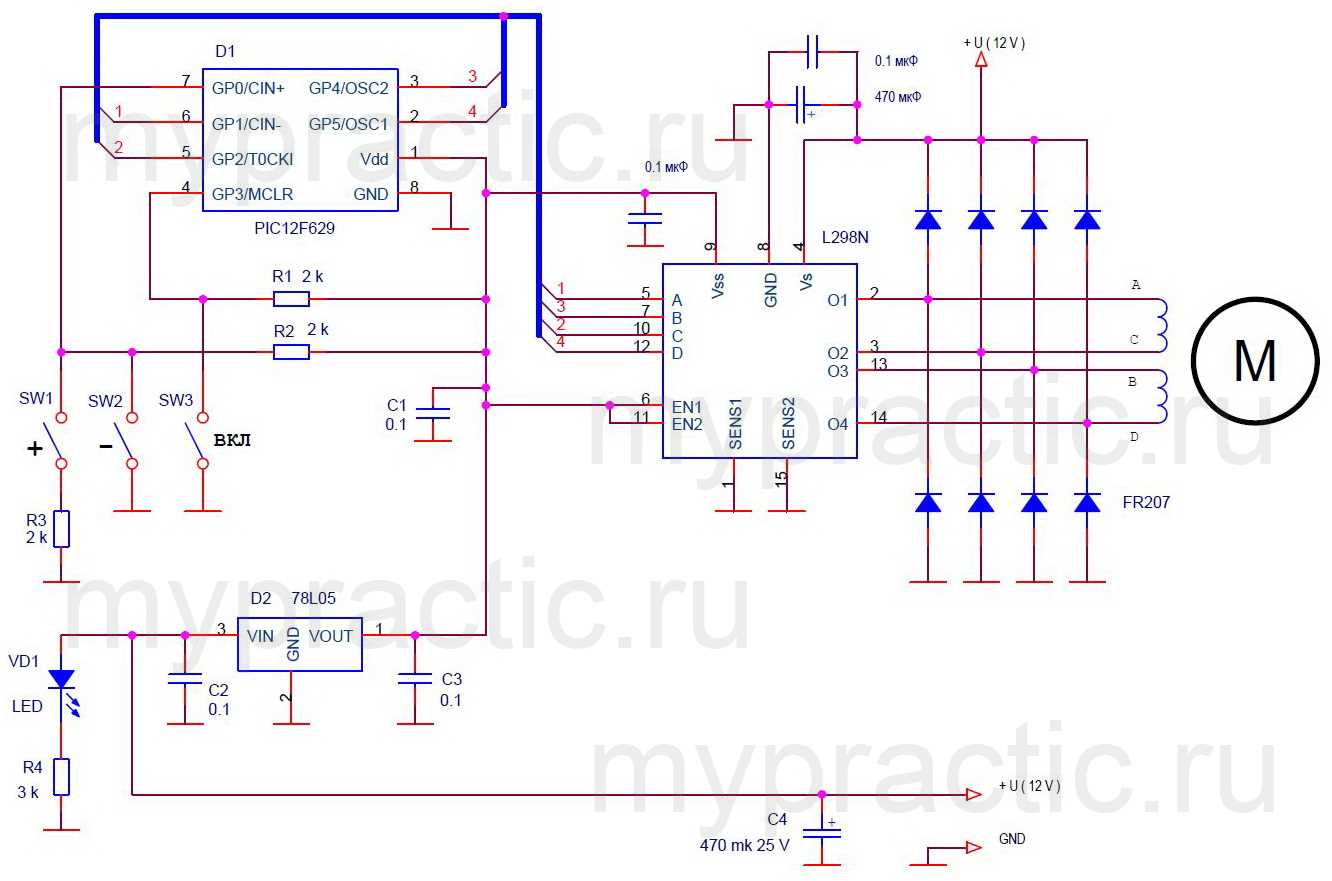
L298N illesztőprogram jár hozzá szabványos séma. Ez a vezérlőopció legfeljebb 2 A fázisáramot és 30 V-os feszültséget biztosít.
Csatlakozás bipoláris léptetőmotor vezérlőhöz.
Ebben az üzemmódban bármilyen 4, 6, 8 vezetékes tekercselési konfigurációjú motor csatlakoztatható.
4 vezetékes (vezetékes) bipoláris léptetőmotor kapcsolási rajza.

Az FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH motoroknál 4 vezetékes tekercselés konfigurációval a sorkapcsok a következő színekkel vannak jelölve.
6 vezetékes (vezetékes) bipoláris léptetőmotor kapcsolási rajza.

Az FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH motoroknál ezzel a tekercselési konfigurációval a kapcsok a következő színekkel vannak jelölve.
Egy ilyen áramkörhöz kétszer akkora tápfeszültségre van szükség, mint egy unipoláris csatlakozáshoz, mert A tekercsellenállás kétszer akkora. Valószínűleg a vezérlőt 24 V-os tápegységhez kell csatlakoztatni.
8 vezetékes (vezetékes) bipoláris léptetőmotor kapcsolási rajza.
Két lehetőség lehet:
- szekvenciális kapcsolattal
- párhuzamos csatlakozással.
A tekercsek szekvenciális csatlakoztatásának sémája.

A sorba kapcsolt tekercsekkel rendelkező áramkör kétszeres tekercsfeszültséget igényel. De a fázisáram nem növekszik.
A tekercsek párhuzamos kapcsolásának diagramja.

A tekercsek párhuzamos csatlakozásával rendelkező áramkör megduplázza a fázisáramokat. Ennek az áramkörnek az előnyei közé tartozik a fázistekercsek alacsony induktivitása. Ez nagy fordulatszámon fontos.
Azok. A 8 tűs bipoláris léptetőmotor soros és párhuzamos csatlakozása közötti választást a következő kritériumok határozzák meg:
- maximális meghajtóáram;
- maximális feszültség járművezetők;
- motor fordulatszáma.
A PIC12F629 szoftver (firmware) letölthető.
- Bár a bipoláris léptetőmotorok viszonylag drágák, fizikai méretükhöz képest nagy nyomatékot biztosítanak. A két motortekercshez azonban nyolc vezérlőtranzisztorra van szükség, amelyeket négy H-hídba kell csatlakoztatni. Minden tranzisztornak ellenállnia kell a túlterheléseknek és a rövidzárlatoknak, és gyorsan vissza kell állítania a működőképességet. És ennek megfelelően a vezető megköveteli összetett áramkörök védelem sok passzív alkatrészek.

1. kép
1. ábra. Egyetlen IC egy felületre szerelhető csomagban és több passzív komponens képes meghajtani a bipoláris léptetőmotort.
Bipoláris léptetőmotor vezérlés
DIY léptetőmotor meghajtó- Az 1. ábra egy alternatív motormeghajtó áramkört mutat, amely a Maxim D osztályú hangerősítőjén alapul. A miniatűr felületre szerelhető csomagban lévő MAX9715 chip akár 2,8 W teljesítményt is képes leadni tipikus 4 vagy 8 ohmos terhelés mellett. A mikroáramkör mindkét kimenetét erős MOSFET-ekből álló H-hidak alkotják, amelyek OUTR+, OUTR- és OUTL+, OUTL- vonalpárokat vezérelnek, amelyek a léptetőmotor A és B tekercséhez kapcsolódnak. Mindegyik pár differenciálszélességű modulált impulzusjelet generál 1,22 MHz névleges kapcsolási frekvenciával. Az áramkör által keltett alacsony zajszint miatt nincs szükség kimeneti szűrőkre.
Lecsatoló kondenzátorok
A C1, C3, C4 és C6 kondenzátorok a teljesítmény- és előfeszítési bemenetek szétcsatolására szolgálnak, míg a C5 és C7 tárolási funkciókat biztosít a nagy teljesítményű D osztályú kimeneti erősítők számára, a C8 és C9 kondenzátorok pedig 16 Hz-re korlátozzák az erősítő sávszélességét, az L2 ferritgyöngyök pedig. és L3 csillapítja a hosszú kábelek okozta elektromos interferenciát. Az U alakú C1, C2, L1 szűrő elnyomja a zajt az IC1 chip bemeneténél. A motor jobb és bal csatornáját vezérlő Step_A és Step_B mikroáramkörök bemeneti jelei bármilyen alkalmas vezérlővel előállíthatók. A belső áramkörök védik az erősítőt a rövidzárlattól és a túlmelegedéstől a léptetőmotor meghibásodása, ill. helytelen csatlakozás következtetéseit.

Asztal 1
Impulzussorozat illusztráció
Az 1. táblázat a Step_A és Step_B impulzusok sorozatát szemlélteti, amelyek egy tipikus léptetőmotor forgását egy irányba vezérlik a 0-tól 4-ig terjedő jelkombinációk folyamatos alkalmazásával. A 4. lépés visszaállítja a motor tengelyét kezdő pozíció 360°-os elforgatással. A motor forgásirányának megváltoztatásához kezdje el az impulzusok időzítési diagramjának elkészítését a táblázat aljáról, és következetesen haladjon felfelé. A mikroáramkör SHDN bemenetére (8-as érintkező) alacsony logikai szintű feszültséget kapcsolva kikapcsolhatja az erősítő mindkét csatornáját. Az áramkör be- és kimenetein lévő hullámformák a 2. ábrán láthatók.
A léptetőmotorokat ma számos ipari területen használják. Motorok ebből a típusból abban különböznek, hogy lehetővé teszik a munkatest nagy pozicionálási pontosságának elérését más típusú motorokhoz képest. Nyilvánvaló, hogy a léptetőmotor működtetéséhez pontos automatikus vezérlésre van szükség. Pontosan ezt szolgálják erre a célra. léptetőmotoros vezérlők, biztosítva a különböző célú elektromos hajtások zavartalan és pontos működését.
Nagyjából a léptetőmotor működési elve a következőképpen írható le. A léptetőmotor forgórészének minden teljes fordulata több lépésből áll. A léptetőmotorok túlnyomó többsége 1,8 fokos lépésekre van besorolva, és teljes fordulatonként 200 lépést tesz meg. A hajtás lépésről lépésre változtatja pozícióját, ha tápfeszültséget kapcsolnak egy bizonyos állórész tekercsre. A forgásirány a tekercsben lévő áram irányától függ.
A következő lépés az első tekercs kikapcsolása, áramellátás a második és így tovább, ennek eredményeként minden tekercs kidolgozása után a forgórész teljes fordulatot hajt végre. De ez egy durva leírás, az algoritmusok valamivel összetettebbek, és erről még lesz szó.

Léptetőmotoros vezérlő algoritmusok
A léptetőmotoros vezérlés négy fő algoritmus egyikével valósítható meg: váltakozó fáziskapcsolás, fázisátfedő vezérlés, féllépéses vezérlés vagy mikrolépéses vezérlés.
Az első esetben minden időpillanatban csak az egyik fázis kap áramot, és a motor forgórészének egyensúlyi pontjai minden lépésben egybeesnek a kulcsfontosságú egyensúlyi pontokkal - a pólusok egyértelműen kifejeződnek.
A fázisátfedő vezérlés lehetővé teszi, hogy a forgórész az állórész pólusai közötti pozíciókba lépjen, ami 40%-kal növeli a nyomatékot a nem fázisátfedő szabályozáshoz képest. A dőlésszög megmarad, de a rögzítési helyzet eltolódik - az állórész póluskiemelkedései között helyezkedik el. Ezt az első két algoritmust olyan elektromos berendezésekben használják, ahol nincs szükség nagyon nagy pontosságra.
A féllépéses vezérlés az első két algoritmus kombinációja: egy lépés után vagy egy fázis (tekercselés), vagy kettő kap áramot. A lépés mérete felére csökken, a pozicionálási pontosság nagyobb, és csökken a mechanikai rezonancia valószínűsége a motorban.
Végül a mikrolépéses mód. Itt az áramerősség a fázisokban úgy változik, hogy a rotor rögzítésének helyzete lépésenként a pólusok közötti ponton legyen, és az egyidejűleg bekapcsolt fázisok áramainak nagyságrendjének arányától függően több ilyen lépés. megszerezhető. Az áramarány beállításával és a munkaarányok számának beállításával mikrolépések érhetők el - a rotor legpontosabb pozicionálása.
További részleteket diagramokkal itt talál:
A választott algoritmus gyakorlati megvalósításához használja léptetőmotor meghajtó. A meghajtó egy tápegységet és egy vezérlőt tartalmaz.
A meghajtó teljesítményrésze az, amelynek feladata a fázisokhoz szállított áramimpulzusok forgórészmozgásokká alakítása: egy impulzus - egy pontos lépés vagy mikrolépés.
Az áram iránya és nagysága - a lépés iránya és nagysága. Azaz a teljesítményrész feladata, hogy egy bizonyos nagyságú és irányú áramot adjon a megfelelő állórész tekercshez, tartsa ezt az áramot egy ideig, és gyorsan be- és kikapcsolja az áramokat, hogy a sebesség és a teljesítmény jellemzői a meghajtó megfelel a feladatnak.

Minél fejlettebb a meghajtó erőrésze, annál nagyobb nyomaték érhető el a tengelyen. Általánosságban elmondható, hogy a léptetőmotorok és meghajtóik fejlesztése terén az a tendencia, hogy jelentős üzemi nyomatékot és nagy pontosságot érjenek el a kis méretű motoroktól, miközben megőrzik a nagy hatékonyságot.
Léptetőmotor vezérlő
A léptetőmotor-vezérlő a rendszer intelligens része, amely általában egy újraprogramozási képességgel rendelkező mikrokontrolleren alapul. A vezérlő felelős azért, hogy melyik pillanatban, melyik tekercshez, mennyi ideig és milyen erősségű áramot szolgáltatnak. A vezérlő vezérli a vezető tápegységének működését.
A fejlett vezérlők számítógéphez csatlakoznak, és valós időben állíthatók be a számítógép segítségével. A mikrokontroller többszöri átprogramozásának lehetősége kiküszöböli a felhasználónak a feladat beállításához új vezérlő vásárlását - elég a meglévőt újrakonfigurálni, ez a rugalmasság, a vezérlő könnyen átirányítható programozottan új funkciók végrehajtásához .
Napjainkban a termékek széles választéka elérhető a piacon modell sorozat léptetőmotor-vezérlők től különböző gyártók, amelyet a funkciók bővítésének lehetősége jellemez. A programozható vezérlők programrögzítést igényelnek, egyesek programozható logikai blokkokat is tartalmaznak, amelyek segítségével rugalmasan konfigurálható a léptetőmotor vezérlő algoritmusa egy adott technológiai folyamathoz.
Vezérlő képességei
A léptetőmotor vezérlővel történő vezérlése nagy pontosságot tesz lehetővé akár 20 000 mikrolépés/fordulat eléréséig. Sőt, a vezérlés akár közvetlenül a számítógépről, akár a készülékbe flashelt programmal vagy memóriakártyáról tárolt program segítségével is végrehajtható. Ha egy feladat végrehajtása során a paraméterek megváltoznak, a számítógép lekérdezheti az érzékelőket, figyelheti a változó paramétereket és gyorsan megváltoztathatja a léptetőmotor működési módját.
Kereskedelmi forgalomban kapható léptetőmotor-vezérlőegységek, amelyekhez csatlakoztatható: áramforrás, vezérlőgombok, órajelforrás, potenciométer a lépés beállításához stb. Az ilyen egységek lehetővé teszik a gyors integrálást léptetőmotor ismétlődő, ciklikus feladatokat kézi, ill automatikus vezérlés. Lehetőség a szinkronizálásra külső eszközökés támogatás automatikus bekapcsolás, a kikapcsolás és vezérlés a léptetőmotoros vezérlőegység kétségtelen előnye.
Az egység közvetlenül a számítógépről vezérelhető, ha például le kell játszani egy programot, vagy befelé kézi üzemmód kiegészítő külső vezérlés nélkül, azaz önállóan, amikor a léptetőmotor tengelyének forgásirányát egy hátrameneti érzékelő állítja be, a fordulatszámot pedig potenciométer szabályozza. A vezérlőegység kiválasztása a használni kívánt léptetőmotor paraméterei szerint történik.
A cél jellegétől függően a léptetőmotor vezérlési módját választják. Ha egy kis teljesítményű elektromos hajtás egyszerű vezérlését kell beállítani, amikor minden pillanatban egy impulzust adnak egy állórész tekercsére: egy teljes fordulathoz mondjuk 48 lépésre van szükség, és a rotor 7,5 fokot fog elmozdulni minden lépést. Ebben az esetben az egyimpulzusos üzemmód megfelelő.
A nagyobb nyomaték eléréséhez kettős impulzust használnak - egy impulzust egyidejűleg alkalmaznak két szomszédos tekercsre. És ha azért teljes fordulat Ha 48 lépésre van szüksége, akkor ismét 48 kettős impulzusra van szüksége, mindegyik 7,5 fokos lépéshez vezet, de 40%-kal nagyobb nyomatékkal, mint az egyimpulzusos üzemmódban. Mindkét módszer kombinálásával a lépések elosztásával 96 impulzust kaphatunk - lépésenként 3,75 fokot kapunk - ez egy kombinált vezérlési mód (féllépés).
Szinte mindenkinek dolgozni elektromos készülékek, speciális meghajtó mechanizmusokra van szükség. Javasoljuk, hogy fontolja meg, mi a léptetőmotor, annak kialakítása, működési elve és csatlakozási rajzai.
Mi az a léptetőmotor?
A léptetőmotor az elektromos autó, átalakításra szánt elektromos energia hálózatok mechanikai energiává. Szerkezetileg állórész tekercsekből és lágymágneses vagy keménymágneses rotorból áll. A léptetőmotor megkülönböztető jellemzője a diszkrét forgás, amelyben egy adott számú impulzus megfelel bizonyos számú lépésnek. A legtöbb alkalmazás Az ilyen eszközöket CNC gépekben, robotikában, valamint információtároló és -olvasó eszközökben alkalmazzák.
Más típusú gépekkel ellentétben a léptetőmotor nem folyamatosan, hanem lépésenként forog, innen ered az eszköz neve is. Minden ilyen lépés csak egy töredéke a teljes forradalmának. A tengely teljes elforgatásához szükséges lépések száma a csatlakozási rajztól, a motor márkától és a vezérlési módtól függően változik.
A léptetőmotor előnyei és hátrányai
A léptetőmotor használatának előnyei a következők:
- Léptetős villanymotoroknál a forgásszög a leadott elektromos jelek számának felel meg, míg a forgás leállása után a teljes nyomaték és a rögzítés megmarad;
- Pontos pozicionálás – a beállított lépés 3 – 5%-át biztosítja, amely nem halmozódik fel lépésről lépésre;
- Biztosítja Magassebesség indítás, hátramenet, leállítás;
- Más magas megbízhatóság az áramfelvételhez dörzsölő alkatrészek hiánya miatt, ellentétben a kommutátormotorokkal;
- A léptetőmotor nem igényel visszacsatolást a pozícióhoz;
- Alacsony fordulatszámot képes előállítani közvetlenül alkalmazott terhelésre, sebességváltó nélkül;
- Viszonylag alacsonyabb költség az azonoshoz képest;
- Biztosítani széleskörű szabályozza a tengely fordulatszámát az elektromos impulzusok frekvenciájának változtatásával.
A léptetőmotor használatának hátrányai a következők:
- Rezonanciahatás és a léptetőegység elcsúszása léphet fel;
- Fennáll az irányítás elvesztése a visszacsatolás hiánya miatt;
- Az elfogyasztott villamos energia mennyisége nem függ a terhelés meglététől vagy hiányától;
- Irányítási nehézségek az áramkör kialakítása miatt
Kialakítás és működési elv
Rizs. 1. A léptetőmotor működési elveAz 1. ábrán a motor állórészéhez tartozó 4 tekercs látható, amelyek elrendezése úgy van elrendezve, hogy egymáshoz képest 90°-os szöget zárjanak be. Ebből következik, hogy egy ilyen gépet 90º-os lépésméret jellemez.
Abban a pillanatban, amikor az U1 feszültséget az első tekercsre kapcsolják, a rotor ugyanazzal a 90º-kal mozog. A megfelelő tekercselés U2, U3, U4 feszültségének váltakozó táplálása esetén a tengely a befejezésig tovább forog. teljes kör. Ezután a ciklus újra megismétlődik. A forgásirány megváltoztatásához elegendő megváltoztatni az impulzusok ellátásának sorrendjét a megfelelő tekercsekhez.
Léptetőmotorok típusai
Szolgáltatni különféle paraméterek munkavégzés során mind a lépésméret, amellyel a tengely eltolódik, mind a mozgáshoz szükséges nyomaték fontos. Ezek a paraméterek a forgórész kialakításának, a csatlakozási módnak és a tekercsek kialakításának köszönhetően változnak.
Rotoros kialakítás szerint
A forgó elem mágneses kölcsönhatást biztosít elektromágneses mezőállórész. Ezért a kialakítása és műszaki jellemzők közvetlenül határozza meg a léptető egység működési módját és forgási paramétereit. A léptetőmotor típusának gyakorlati meghatározásához feszültségmentesített hálózatnál el kell forgatni a tengelyt, ha ellenállást érez, ez egyébként mágneses ellenállás nélküli kivitelről van szó.
Reaktív
A reaktív léptetőmotor nem rendelkezik mágnessel a forgórészen, hanem általában lágy mágneses ötvözetekből készül, az indukciós veszteségek csökkentése érdekében. A kialakítás keresztmetszetében fogazott fogaskerékhez hasonlít. lengyelek állórész tekercsek ellentétes párok hajtják, és mágneses erőt hoznak létre a forgórész mozgatásához, amely a váltakozó áramlás miatt mozog elektromos áram kanyargós párokban.

Ennek a léptető hajtásnak a jelentős előnye, hogy nincs a mező által a vasaláshoz képest generált leállási nyomaték. Valójában ez ugyanaz, amikor a forgórész az állórész mezőjének megfelelően forog. Hátránya a nyomaték csökkenése. Lépj érte repülőgép hajtómű 5-15° között mozog.
Állandó mágnesekkel
Ebben az esetben a léptetőmotor mozgó eleme abból van összeállítva állandómágnes, amelynek két vagy több pólusa lehet. A forgórész forgását a mágneses pólusok vonzása vagy taszítása biztosítja az elektromos tér által, amikor feszültséget kapcsolunk a megfelelő tekercsekre. Ennél a kialakításnál a szöglépés 45-90°.

Hibrid
Egyesülésre tervezték legjobb tulajdonságait kettő korábbi modellek, aminek köszönhetően az egységnek kisebb a szöge és emelkedése. Forgórésze hengeres állandó mágnes formájában készül, amely a hossztengely mentén mágnesezett. Szerkezetileg úgy néz ki, mint két kerek pólus, amelyek felületén puha mágneses anyagból készült rotorfogak találhatók. Ez a megoldás kiváló tartást és nyomatékot tett lehetővé.

A hibrid léptetőmotor előnyei a nagy pontosság, a sima és mozgási sebesség, a kis lépések - 0,9 és 5° között. Csúcskategóriás CNC gépekhez, számítógépes és irodai berendezésekhez és modern robotikához használják. Az egyetlen hátránya viszonylag magas költségnek tekinthető.
Példaként nézzük meg a hibrid motorok lehetőségét 200 tengelypozícionáló lépéssel. Ennek megfelelően mindegyik hengernek 50 foga lesz, az egyik pozitív pólus, a második negatív. Ebben az esetben minden pozitív fog a negatív henger hornyával szemben helyezkedik el, és fordítva. Szerkezetileg így néz ki:

Emiatt 100 váltakozó pólus van kiváló polaritással a léptetőmotor tengelyén. Az állórésznek is vannak fogai, amint az alábbi 6. ábrán látható, kivéve az alkatrészei közötti réseket.
 Rizs. 6. A hibrid léptetőmotor működési elve
Rizs. 6. A hibrid léptetőmotor működési elve Ennek a kialakításnak köszönhetően 50 különböző helyzetben lehet elérni ugyanazt a déli pólust az állórészhez képest. Az északi és a déli pólus közötti félállásbeli helyzetkülönbség miatt 100 pozícióban való mozgás érhető el, a negyedosztásos fáziseltolódás pedig lehetővé teszi a lépések számának növelését szekvenciális gerjesztés még kétszer, azaz 1 fordulatonként legfeljebb 200 lépés a szögletes tengelyből.
Figyeljük meg a 6. ábrát, egy ilyen léptetőmotor működési elve az, hogy amikor az áramot párban adjuk az ellentétes tekercsekhez, akkor a forgórész ellentétes pólusai, amelyek az állórész fogai mögött helyezkednek el, összehúzódnak, és a hasonló pólusok előre mozognak. közülük a forgásirányban taszítják.
Tekercselés típusa szerint
A gyakorlatban a léptetőmotor többfázisú motor. A működés simasága közvetlenül függ a tekercsek számától - minél több van, annál simább a forgás, de annál magasabb a költség. Ebben az esetben a forgatónyomaték nem növekszik a fázisok számától, bár normál működéshez ezek minimális számának az elektromos motor állórészén legalább kettőnek kell lennie. A fázisok száma nem határozza meg a tekercsek számát, így egy kétfázisú léptetőmotor négy vagy több tekercses is lehet.
Unipoláris
Az egypólusú léptetőmotor abban különbözik, hogy a tekercselési kapcsolási rajzon van egy elágazás a középső ponttól. Ez megkönnyíti a mágneses pólusok cseréjét. Ennek a kialakításnak az a hátránya, hogy a rendelkezésre álló fordulatoknak csak a felét használják ki, így kevesebb nyomaték érhető el. Ezért nagy méreteik különböztetik meg őket.

A tekercs teljes teljesítményének kihasználásához a középső kivezetést nem kell csatlakoztatni. Tekintsük az egypólusú egységek kialakítását, amelyek 5 és 6 vezetéket tartalmazhatnak. Számuk attól függ, hogy a középső vezetéket külön-e kivezetik az egyes motortekercsekből, vagy össze vannak kötve.

Kétpólusú
A bipoláris léptetőmotor 4 érintkezőn keresztül csatlakozik a vezérlőhöz. Ebben az esetben a tekercsek belsőleg sorosan és párhuzamosan is csatlakoztathatók. Tekintsünk egy példát munkájára az ábrán.

Egy ilyen motor tervezési diagramjában minden fázisban egy gerjesztő tekercs látható. Emiatt az áram irányának megváltoztatása használatot igényel elektronikus áramkör speciális meghajtók (vezérlésre tervezett elektronikus chipek). Hasonló hatás érhető el a H-híd bekapcsolásával. Az előzőhöz képest a bipoláris eszköz sokkal kisebb méretekkel biztosítja ugyanazt a nyomatékot.
Léptetőmotor csatlakoztatása
A tekercsek táplálásához olyan eszközre lesz szüksége, amely képes egy vezérlő impulzust vagy impulzusok sorozatát egy bizonyos sorrendben leadni. Ilyen blokkok félvezető eszközök léptetőmotor, mikroprocesszor meghajtók csatlakoztatásához. Amelyeknek van egy sor kimeneti csatlakozója, mindegyik meghatározza a tápellátás módját és az üzemmódot.
A csatlakozási rajztól függően a léptetőegység egyik vagy másik kimenetét kell használni. Különböző lehetőségekkel egyes terminálok kimeneti jelhez való csatlakoztatására egyenáram egy bizonyos forgási sebességet, lépést vagy a síkbeli lineáris mozgás mikrolépését kapjuk. Mivel egyes feladatok alacsony frekvenciát, míg mások magas frekvenciát igényelnek, ugyanaz a motor beállíthatja a paramétert a meghajtó rovására.
Tipikus SD csatlakozási diagramok
Az adott léptetőmotoron lévő érintkezők számától függően: 4, 6 vagy 8 érintkező, az egyik vagy másik csatlakozási séma használatának lehetősége is eltérő. Nézd meg a képeket, itt láthatóak tipikus lehetőségek léptető csatlakozás:
 Csatlakozási rajzok különféle típusok léptetőmotorok
Csatlakozási rajzok különféle típusok léptetőmotorok Feltéve, hogy a léptetőgép fő pólusait ugyanarról a meghajtóról táplálják, ezeknek az ábráknak megfelelően a következők figyelhetők meg: megkülönböztető jellegzetességek művek:
- A vezetékek egyértelműen csatlakoznak a készülék megfelelő kapcsaihoz. A tekercsek sorba kapcsolásakor a tekercsek induktivitása nő, de az áramerősség csökken.
- Útlevélértéket biztosít elektromos jellemzők. Nál nél párhuzamos áramkör az áramerősség nő és az induktivitás csökken.
- Tekercsenként egy fázis csatlakoztatása esetén a nyomaték eggyel csökken alacsony fordulatszámés csökkenti az áramok nagyságát.
- Bekötéskor minden elektromos ill dinamikus jellemzők Az útlevél szerint névleges áramok. Az ellenőrzési séma jelentősen leegyszerűsödik.
- Sokkal nagyobb nyomatékot termel, és nagy fordulatszámokhoz használják;
- Az előzőhöz hasonlóan a nyomaték növelésére szolgál, de erre használják alacsony frekvenciák forgás.
Léptetőmotor vezérlés
A léptetőegységgel végzett műveletek többféle módszerrel is végrehajthatók. Ezek mindegyike abban különbözik, ahogyan a póluspárokhoz továbbít jeleket. Összességében számos tekercs aktiválási módszer létezik.
Hullám– ebben az üzemmódban csak egy tekercs van gerjesztve, amelyhez a rotor pólusai vonzódnak. Ugyanakkor a léptetőmotor nem képes nagy terhelést húzni, mivel csak a nyomaték felét adja le.

Teljes lépés— ebben az üzemmódban egyidejű fázisváltás történik, azaz mindkettő egyszerre gerjesztődik. Ennek köszönhetően a maximális nyomaték biztosított, a tekercsek párhuzamos vagy soros kapcsolása esetén a maximális feszültség vagy áram jön létre.

Féllépés– az előző két tekercskapcsolási módszer kombinációja. Ennek megvalósítása során a léptetőmotorban váltakozva először egy tekercsre, majd egyszerre kettőre kap feszültséget. Ez biztosítja a jobb rögzítést maximális sebességekés további lépések.

A lágyabb szabályozás és a rotor tehetetlenségének leküzdése érdekében mikrolépéses vezérlést alkalmaznak, amikor a jel szinuszhullámát mikrolépéses impulzusok hajtják végre. Emiatt a léptetőmotorban a mágneses áramkörök kölcsönhatási erői egyenletesebb változást kapnak, és ennek következtében a rotor a pólusok között mozog. Lehetővé teszi a léptetőmotor rángatásának jelentős csökkentését.
Vezérlő nélkül
Vezetéshez kefe nélküli motorok A H-híd rendszert használják. Ez lehetővé teszi a polaritás megváltoztatását a léptetőmotor megfordításához. Elvégezhető tranzisztorokon vagy mikroáramkörökön, amelyek logikai láncot hoznak létre a billentyűk mozgatásához.

Amint látja, a hídra a V áramforrásról kap feszültséget. Ha az S1 – S4 vagy az S3 – S2 érintkezők páronként vannak csatlakoztatva, az áram a motor tekercselésein keresztül folyik. Ami egyik vagy másik irányba forgást okoz.
Vezérlővel
A vezérlőeszköz lehetővé teszi a léptetőmotor behajtását különféle módok. A vezérlő alapja az elektronikus egység, amelyek az állórész tekercseire küldött jelekből és azok sorrendjéből csoportokat alkotnak. A károsodás lehetőségének megelőzése érdekében, ha rövidzárlat vagy más vészhelyzet Magán a motoron minden kivezetést egy dióda véd, amely nem engedi, hogy az impulzus az ellenkező irányba haladjon.
 Csatlakozás unipoláris léptetőmotor-vezérlőn keresztül
Csatlakozás unipoláris léptetőmotor-vezérlőn keresztül Népszerű motorvezérlési sémák
 Vezérlőáramkör differenciális kimenetű vezérlőről
Vezérlőáramkör differenciális kimenetű vezérlőről Ez az egyik leginkább zajálló munkamódszer. Ebben az esetben a közvetlen és az inverz jelek közvetlenül a megfelelő pólusokhoz vannak kötve. Egy ilyen áramkörben a jelvezető árnyékolását kell alkalmazni. Ideális kis teljesítményű terhelésekhez.
 Vezérlőáramkör „nyílt kollektoros” típusú vezérlőről
Vezérlőáramkör „nyílt kollektoros” típusú vezérlőről Ebben az áramkörben a vezérlő pozitív bemenetei vannak kombinálva, amelyek a pozitív pólusra vannak kötve. 9V feletti tápellátás esetén az áramkör korlátozására speciális ellenállást kell beépíteni. Lehetővé teszi a beállítást szükséges mennyiség szigorú lépésekkel sebesség beállítása, gyorsulás meghatározása stb.
A legegyszerűbb DIY léptetőmotor meghajtó
A meghajtó áramkör otthoni összeállításához hasznos lehet néhány régi nyomtató, számítógép és egyéb berendezés elem. Szüksége lesz tranzisztorokra, diódákra, ellenállásokra (R) és egy mikroáramkörre (RG).

A program felépítésénél a következő elv szerint kell eljárni: ha logikai egységet helyezünk az egyik D érintkezőre (a többi nullát jelez), a tranzisztor kinyílik, és a jel átmegy a motortekercsbe. Így egy lépés befejeződött.
A diagram alapján a nyomtatott áramkör, amit megpróbálhatsz magad elkészíteni vagy megrendelésre elkészíteni. Ezt követően a megfelelő alkatrészeket a táblára forrasztják. A készülék képes irányítani léptető eszköz otthoni számítógépéről egy normál USB-porthoz való csatlakozással.