To kategooria:
Autode hooldus
Rooliajam ja auto ajam
Rooliseade. Roolivõlli pöörleva liikumise teisendamiseks bipodi õõtsuvaks liikumiseks ja roolilt roolihoobale edastatava võimenduse suurendamiseks kasutatakse roolimehhanismi. Suure ülekandearvu olemasolu (15 kuni 30) roolimehhanismides hõlbustab sõitmist. Ülekandearvu määrab rooli pöördenurga ja auto juhitavate rataste pöördenurga suhe.

Riis. 1. Juhtimine autod:
a - esirataste sõltuv vedrustus; b - sõltumatu vedrustus

Riis. 2. Auto GAZ-53A roolimehhanism
Roolimehhanismid jagunevad tigu-, kruvi-, kombineeritud- ja hammasrattaks (käigukastiks). Ussimehhanismid on varustatud tigurulli, ussisektori ja tiguvända ülekandega. Rull võib olla kahe- või kolmeharjaline, sektor - kahe- ja mitmehambaline, vänt - ühe või kahe naelaga. Kruvimehhanismides toimub jõudude ülekanne kruvi ja mutri abil. Kombineeritud mehhanismides toimub jõudude ülekanne järgmiste sõlmede kaudu: kruvi, mutter - rööp ja sektor; kruvi, mutter ja vänt; mutter ja hoob. Hammasrattad ja hammasrattad on valmistatud hammasratastest ja hammasratastest. Kõige laialdasemalt kasutatav jõuülekanne on globoidne uss - rull-laagritel. Sellises paaris on hõõrdumine ja kulumine oluliselt vähenenud ning haardumises säilivad vajalikud vahed. Seda tüüpi roolimehhanisme kasutatakse enamikul GAZ, VAZ, AZLK jne autodel.
GAZ-BZA sõidukitele paigaldatud tiguroolimehhanismil on sisse lülitatud globoidne uss ja kolmeharjaline rull. Uss surutakse õõnesvõllile ja paigaldatakse rooliseadme korpusesse kahele koonusrull-laagrile. Rull pöörleb nõellaagrites teljel. Rulli telg on surutud bipodi võlli pea sisse, mis pöörleb hülsis ja silindrilises rull-laagris. Bipod on istutatud võlli otsa väikestele koonustele. Rulli haardumine ussiga oleneb reguleerimiskruvi asendist, mis on fikseeritud lukustusseibi, tihvti ja kruvi külge keeratud korkmutriga.
Roolivõll asetatakse torusse (roolisammas), mille alumine ots on kinnitatud ülemise karteri kaane külge. Roolisamba ülemisse ossa on paigaldatud roolivõlli nurkkontaktlaager, millel on rooli paigaldamiseks väikesed koonilised splinsid. Õli valatakse roolimehhanismi karterisse kruvikorgiga suletud ava kaudu. Seda tüüpi roolimehhanismid on paigaldatud autodele GAZ-24 Volga, GAZ-302 Volga, GAZ-66, bussidele LAZ-695N jne.
Sõidukitele ZIL-130 paigaldatud kruviga roolimehhanism koosneb karterist, mis on integreeritud hüdrovõimendi silindriga, kuulmutriga kruvist ja käigukastiga kolviraamist.

Riis. 3. Auto ZIL -130 roolimehhanism

Riis. 4. Auto MAZ -5335 roolimehhanism
Sektor on valmistatud ühes tükis roolihoova võlliga. Karter on suletud katetega 1.8 ja 12. Mutter kinnitatakse kruvidega kolbsiinisse. Kruvi ühendatakse mutriga kuulidega, mis asetatakse mutri ja kruvi soonde 6.
Tsirkuleerivate kuulide kruvi ja mutriga roolimehhanismi iseloomustavad väikesed hõõrdekaod ja pikendatud tähtaeg teenuseid.
Juhtventiili korpuses on kruvile paigaldatud kaks tõukejõu kuullaagrit ja nende vahel on juhtklapi pool. Nende laagrite kliirensit reguleeritakse mutriga.
Kolviraami ja hammassektori haardumise pilu reguleeritakse roolivarre võlli nihutamisega kruviga, mille pea siseneb õlavarre avasse ja toetub tõukejõu seibile. Magnetkorgiga suletud ava kaudu juhitakse õli välja roolimehhanismi karterisse.
Rooli pööramisel liigutab kruvi kuulmutrit koos kolviraamiga ja hammassektorit kahejalgse võlliga. Edasi kandub jõud üle rooliajamile, tagades auto rataste pöörlemise. Nii toimib rool ilma roolivõimendita ehk koos tühikäigu mootor.
Sõidukile MA3-5335 paigaldatud kombineeritud roolimehhanism koosneb kruvist ja kuulmutterist, mis on ühendatud hammasrattasektoriga, mille võll on ühtlasi ka bipodi võll. Kruvil ja mutril on poolringikujulised spiraalsed sooned, mis on täidetud kuulidega. Pallide veeremiseks suletud süsteemi loomiseks sisestatakse siini mutterisse stantsitud juhikud, et vältida pallide väljakukkumist. Rooliseadme kruvi on karterisse paigaldatud kahes koonilises laagris ja sektori võll on nõellaagrites.
Iga roolimehhanismi iseloomustab ülekandearv, mis on 20,0 veoautode ZIL-130 ja KamAE-5320 roolimehhanismide puhul, 20,5 autode GAZ-53A, MA3-5335-23,6 sõiduautode, RAF-2203 busside puhul - 19,1 ja bussid LAZ -695N-23,5 ja autode puhul on see vahemikus 12-20.
KamAZ perekonna sõidukitel on kruvimutri tüüpi roolimehhanism paigutatud koos nurkkäigu reduktoriga, mis edastab pöördemomendi jõuülekanne roolivõll rooliratta kruvi külge.
Bussides LiAZ-677M ja LAZ-4202 kasutatakse nurkkäigukasti pöördemomendi edastamiseks täisnurga all roolilt läbi kardaan uss-sektori tüüpi roolimehhanismile.
Hammaslatt kätte saanud lai rakendus esiveolisel autod VAZ -2108 "Sputnik" ja AZLK -2141 "Moskvich". Seda on suhteliselt lihtne valmistada ja see võimaldab vähendada roolivarda liigendite arvu.
Sellise roolimehhanismi põhiosad on võllile lõigatud hammasratas ja hammaslatt, mis on ühendatud ja paigutatud karterisse. Roolivõlli pöörlemisel liigutab pöörlev käik hammaslatti pikisuunas, mis hingede kaudu edastab jõu roolivarrastele. Roolivardad läbi roolivarda otsa ja õõtshoovad pööravad juhitavaid rattaid.
Rooliseade. Jõu ülekandmiseks roolimehhanismilt juhitavatele ratastele ja rataste õigeks suhteliseks asendiks pööramisel kasutatakse roolimehhanismi. Roolimehhanismid on varustatud tugeva trapetsiga (koos sõltuv vedrustus rattad) ja tükeldatud trapetsiga (koos sõltumatu vedrustus). Pealegi, rooli trapets see võib olla tagumine või eesmine, st põikvardaga, mis asub eesmise tala taga või ees.
Sõltuva rataste joondusega rooliseadme osad hõlmavad (vt joonis 16.2, a) roolihoob, haakelüli, haakehoob, külgmine lüli ja roolinukk.
Roolihoob võib kõikuda mööda ringjoont, mis asub sõiduki pikiteljega paralleelsel tasapinnal või talaga paralleelsel tasapinnal esisild. Viimasel juhul puudub pikisuunaline lüli ja bipodi jõud kandub läbi keskmise lüli ja kahe külgmise tugivarda pöördetihvtidesse. Bipod kinnitatakse võlli külge koonilistel spiraalidel kõigil sõidukitel mutriga. Bipodi õigeks paigaldamiseks monteerimise ajal tehakse võllile ja bipodile spetsiaalsed märgid. Koonilise auguga roolihoova alumisse otsa on fikseeritud põiklüliga tihvt.
Pikisuunaline Roolivarras valmistatud torust, mille servad on kumerad kahe hinge osade paigaldamiseks. Iga liigend koosneb tihvtist, sfääriliste pindadega tihvti kuulpead katvatest sisestustest, vedrust, piirajast ja keermestatud pistikust. Korgi kruvimisel jääb sõrme pea vedru tõttu sisetükkidega kinni. Vedru pehmendab lööke ratastelt roolihooba ja kaotab tühimiku, kui osad on kulunud. Limiter 5 hoiab ära vedru liigse kokkusurumise ja purunemise korral tihvti hingest lahkumise.

Riis. 5. Auto VAZ-2108 "Sputnik" roolimehhanism
Roolihoovad on pööratavalt varrastega ühendatud. Hingedel on erinev disain ja hoolikalt mustuse eest kaitstud. Määrdeaine siseneb neisse määrdeliitmike kaudu. Mõnes automudelis kasutatakse ühendusliigendites plastikust sisetükke, mis ei vaja auto töötamise ajal määrimist.
Roolivardal on ka torukujuline osa, mille otstesse kruvitakse otsad. lõpeb põiklüli ja vastavalt sellele on liigendotsatel parem- ja vasakkeermed varda pikkuse muutmiseks varvaste reguleerimisel. Otsad kinnitatakse varda külge ühenduspoltidega.

Riis. 6. Roolivarda liigendid:
a - pikisuunaline veojõud; b, c - põiki tõukejõud
Põiksuunalistes roolivarrastes on paigaldatud hinged, milles tihvti liikumine on lubatud ainult vardaga risti. Esirataste sõltumatu vedrustusega roolivarras koosneb keskmisest vardast ja kahest pööratavalt ühendatud külgmistest roolivardast.
Hing koosneb kuultihvtist, millel võib olla sfääriliste pindadega pea või kuulpea, ja kahest ekstsentrilisest puksist, mis on surutud vastu tihvti pistikul hoitava vedru abil. Sellise seadme puhul ei koorma vedrusid tõmbevardale mõjuvad jõud ning hingede osade automaatsel kulumisel vahe kaob. Kuulnõelad paigaldatud kangide koonilistesse aukudesse ja kinnitatud mutritega.
Mõned sõiduautod kasutavad energiat neelavaid turvarooliseadmeid, mis vähendavad jõudu, mis põhjustab juhile õnnetuses vigastusi.
Niisiis toimib GAZ-302 Volga autodel energiat neelavaks seadmeks roolivõlli kahte osa ühendav kummist sidur ning AZLK-2140 autodel on roolivõll ja roolisammas valmistatud komposiidist, mis võimaldab roolivõll, et auto kokkupõrgete ajal sõitjateruumi sees veidi liikuda.
Lisaks on rool valmistatud süvistatud rummu ja pehme padjaga, mis vähendab oluliselt juhi vigastuse raskust sellele löögil. Kasutada võib ka muid seadmeid, mis suurendavad juhi ohutust.
Autodes kasutatakse järgmist tüüpi roolimehhanisme: uss ja sektor (auto Ural-375), uss ja rull (autodel ZIL-164A ja ZIL-157 kolmeharjaline ning GAZ-53A kaheharjaline, ZAZ-965 Zaporožets, Moskvich- 408", M-21 "Volga" jne), kruvi ja mutter ning kombineeritud. Viimaste hulka kuuluvad mehhanismid, mis ühendavad tsirkuleerivatel rullidel kruvi ja mutrit ning sektoriga siini (autod ZIL-130, ZIL-111, BelAZ-540 ja BelAZ-548).
Ussi- ja sektormehhanismis kasutatakse nii tavalist silindrilist ussi kui ka keermepinnaga globoidset ussi, mille pöörded tehakse mööda sektori pöörlemisteljele tsentreeritud ringikaare. Viimasel juhul jääb isegi auto järskudel pööretel sektori hammaste ja ussi vahele väike vahe.
Silindrilise ussi ja sektoriga mehhanism on näidatud joonisel fig. 6, a. Roolivõlli alumisse otsa paigaldatud ussiga on sisse lülitatud käigukast, mis on valmistatud ühes tükis koos roolivarre võlliga.
Joonisel fig. 6, b kujutab ussi ja rulliga tüüpi roolimehhanismi. Roolivõlli alumises otsas on kerakujuline uss, mis haakub kaheharjalise rulliga, mis haakub ussi pööretega ja istub teljele, mis on fikseeritud roolivarre võlli 8 harusse. Seda tüüpi mehhanism on kõige kulumiskindlam ja nõuab pööramisel juhilt kõige vähem pingutust.
Uss võib töötada ka koos külgsektoriga. Seda tüüpi mehhanismides ei toimu hammaste vaheline kontakt eraldi punktides, nagu varem käsitletud hammasrataste puhul, vaid mööda jooni, mis võimaldab edastada palju suuremaid jõude. Sellise jõuülekande hõõrdekaod ja kulumine on aga suured. Lisaks on seda tüüpi mehhanismid eriti tundlikud haardumise reguleerimise täpsuse suhtes.

Riis. 6. Roolimehhanismide peamised tüübid:
a - uss ja sektor; b - uss ja rull; c - uss- ja külgsektor; 1 - roolivõll; 2 - silindriline uss; 3 - käigukast; 4 - kahejalgse võll; 5 - roolihoob; 6 - globoidne uss; 7 - rull; 8 - roolihoova võll; 9 - külgmiste hammasrataste sektor
Joonisel fig. 7 on kujutatud auto GAZ-53F uss-tüüpi roolimehhanismi ja rullikut, mille ülekandearv on 20,5.
Sõiduki raami vasaku küljeosa külge on poltidega kinnitatud malmist rooliseadme korpus, mille sees on haardumiseks asetatud globoidne uss ja kaheharjaline rull. Roolivõlli, mille alumisse otsa on surutud uss, toetavad silindriline rull-laager roolisambas ja kaks koonusrull-laagrit rooliseadme korpuses. Kahel viimasel laagril puuduvad sisemised rõngad ja nende rullikud jooksevad otse ussi pinnale. Rull on paigaldatud teljele kahele kuullaagrile, mille sisemisele rõngale on paigaldatud vedrurõngas. Rulli telg surutakse roolihoova võlli pea sisse ja on ussi teljest karteri külgkatte suunas nihutatud 5,75 mm võrra.
Bipod kinnitatakse mutri ja seibiga võlli väikestele spiraalidele. Neli topeltkiilu tagavad bipodi õige ühenduse võlliga. Bipodi võll pöörleb silindrilises rull-laagris ja puksis ning seda saab pöörata 90°. Hülss asetatakse karterisse ja laager on selle külgkattes. Lisaks küljele on karteril ka ülemine ja alumine kate. Õli valatakse karterisse läbi korgiga suletud ava.
Karter kinnitatakse roolisamba külge klambri ja ühenduspoldi abil. Roolivõlli ülemisse otsa on kinnitatud rool ja signaalnupp. Signaalijuhe kulgeb roolivõlli sees torus; paigaldatud toru ja võlli vahele tihendusrõngas surutakse vedruga vastu toru. Ülemine ots Võll on tihendatud vedruga pressitud õlitihendiga. Bipodi võll on tihendatud näärmetega.

Riis. 7. Auto GAE -53F roolimehhanism:
1 - rõngas; 2 - laagrite sisemine rõngas; 3 - pall; 4 - rulli telg; 5 - tihendusrõngas; 6 - toru; 7 - signaalijuhe; 8 ja 17 - vedrud; 9 ja 15 - kaaned; 10 ja ja - vaheplaadid; 12 - koonusrull-laager; 13 - karter; 14 - kork; 16, 33 ja 34 - õlitihendid; 18 - roolivõll; 19 - roolisammas; 20 - globoidne uss; 21 - kaheharjaline rull; 22 - roolihoova võll; 23 - polt; 24 - krae; 25 ja 32 - silindrilised rull-laagrid; 26 - külgkate; 27 - reguleerimiskruvi; 28 - pähkel; 29 - puks; 30 - rool; 31 - roolihoob
Ussi ja rulli haardumist saab reguleerida ilma roolimehhanismi lahti võtmata, kruviga, mille soon sisaldab roolihoova võlli varre. Nagu juba mainitud, asuvad rulli ja ussi teljed erinevatel tasapindadel; seetõttu piisab haardumise vahe vähendamiseks kahejalgse võlli liigutamisest ussi poole kruvi sisse keerates. Kliirensit saab suurendada kruvi eemaldamisega. Väljaspool on kruvi külge keeratud korkmutter, mis ei lase õlil läbi keerme karterist välja voolata. Rulli ussi küljest lahtiühendamise vältimiseks kasutatakse rooliseadme korpuses sisemisi tõusulaineid. Samuti piiravad need roolihoova võlli pöörlemist. Rull-laagrite aksiaalset kliirensit reguleeritakse karterikaane alt eemaldades spetsiaalse immutusega papi (0,25 mm paksune) ja pärgamenti (0,10-0,12 mm paksune) tihenditega.
Autol M-21 Volga on roolimehhanism disainilt sama.
Autos ZIL-164A kasutatakse ussi ja kolmeharjalise rulliga roolimehhanismi, mis suurendab roolihoova võimalikke pöördenurki ilma haardumist katkestamata.
Joonisel fig. 8 on kujutatud silindrilise tigu tüüpi auto MAZ-200 roolimehhanismi ja külgmist sektorit. Spiraalhammastega uss ja külgsektor asetatakse karterisse. Uss surutakse roolivõlli alumisele otsale. Roolivõlli ja ussi pöörlemisel pöörleb sektor, mille otsahambad haakub ussiga. Nõellaagrid toimivad sektori võlli tugedena.

Riis. 8. Auto MAZ-200 roolimehhanism:
1 - uss; 2 - sektor; h - tihendid; 4 - kujuline pähkel; 5 - nõela laager; 6 - karter
Roolivõlli laagreid reguleeritakse vormitud mutri ääriku all olevate vahetükkide paksuse muutmisega.
Rooliseadmes on auto MAZ-525 kruvil ja mutril roolivõlli alumises otsas kruvikeere. Roolivõlli pöörlemisel liigub selle alumises otsas hülsis asuv mutter mööda võlli üles või alla, pöörates karteris ja karterikaanes olevate hülssidesse paigaldatud roolivarre võlli. Roolivõlli alumine ots ei ole fikseeritud ning ülemises otsas on pöördelaager, mis koosneb kuullaagrist ja kummirõngastest. Roolisammas on alumise ja ülemise otsaga ühendatud rooliseadme korpuse ja pea korpusega.
Rooliülekandearv on määratletud kui rooliratta nurga ja rooliõla nurga suhe. Mida suurem on ülekandearv, seda vähem on rataste pööramiseks vaja pingutada. Kiireks pööramiseks ei tohiks ülekandearv olla liiga suur.
Veoautode roolimehhanismide ülekandearv on 20-40 ja sõiduautodel 17-18.

Riis. 9. Auto MAZ -525 roolimehhanism
Roolimehhanism muudab rooli pöörleva liikumise roolimehhanismi lülide nurkliikumiseks, seda tehakse suure ülekandearvuga (20-24), et vähendada juhi pingutust.
KamAZ sõidukitel kasutatakse roolivõimendi mehhanismi, mis on näidatud joonisel fig. 93. Roolimehhanism ise sisaldab kruvi, mida mööda liigub ringlevatele kuulidele paigaldatud mutter, ja hammasratastega haakuvat kolvilati.
Kuna KamAZ-i sõidukite kabiin on ettepoole nihutatud ja kokkupandav, oli vaja kasutusele võtta roolisamba pöördliigend koos roolimehhanismiga ja täiendav nurkkäigukast.

Riis. 10. Roolivõimendi mehhanismi skeem:
1 - reaktiivkolb; 2- õliradiaator; 3 - kõrgsurvevoolik; 4 - pump; 5 - roolisammas; 6 - kardaanvõll; 7 - ajami käik: 8 - vedav käik; 9 - võlli soshkn; 10 - bipodi võlli hammastega sektor; 11 - kolb-naeris: 12 - kruvi; 13 - kuulmutter; 14 - kuullaagrid: 15 - tõukejõu tagumine laager; 16 - pool; 17 - juhtventiil; 18 - voolik madal rõhk; 19 - tõukejõu eesmine laager
Roolisamba võll on liigendatud kardaan. Võlli teine ots on hinge abil ühendatud nurkkäigukasti veoülekandega. Nurkülekanne koosneb vedavatest ja juhitavatest koonusülekannetest.
Ajami hammasratas on valmistatud ühes tükis, mille võll pöörleb nõel- ja kuullaagritel. Hammasratta kuullaager asub karteri ülemises kaanes. Vedav hammasratas 8 on paigaldatud kahes kuullaagris pöörlevale kruvivõllile. Kruvi mööda liikuv mutter asetatakse kolviraami sisse. Selle välispinnale lõigatakse hambad, mis moodustavad hammastiku ja haakuvad hammastega sektoriga.
Mutri liikumise hõlbustamiseks tehakse sellesse ja kruvisse poolringikujulised spiraalsed sooned, mis moodustavad kuulidega täidetud spiraalse kanali. Kuulide soontest väljakukkumist takistatakse kahest poolest koosnevate stantsitud juhikute paigaldamisega mutri soontesse. Nii moodustunud renn loob kaks suletud veerevate kuulide voogu. Sellel rennil, kui kruvi keerata, veerevad kuulid, väljudes mutri ühelt küljelt ja naastes teiselt poolt. Sõukruvi võllile on paigaldatud kaks tõukelaagrit, mille vahel on juhtklapi pool. Laagrid ja pool on kinnitatud mutri ja vedruseibiga. Pool on veidi pikem kui juhtklapi pesa.
Teljesuunas võivad kruvi ja pool liikuda 1,1 mm piires mõlemas suunas keskmisest asendist, kuhu need suunatakse tagasi spiraalsete vedrude ja reaktsioonikolbide abil, mis on surve all labapumbast väljalasketoru kaudu toidetava õli poolt. . Iga rooli pööre kandub edasi kruvile ja põhjustab vastava rataste pöörde. Samas tekitavad rattad samal ajal vastupanu, mis propellerile üle kandudes kipub seda aksiaalsuunas nihutama. Kui see takistus ületab vedrude eelsurvejõu, muudab kruvi nihkumine pooli asendit. Vastavalt kruvi nihke suunale ühendab pool võimendi ühe õõnsuse tühjendustoruga ja teise äravoolutoruga. Õli rõhu all tekitab kolvilatt lisajõu, mis mõjub bipodi sektorile ja aitab kaasa sõiduki juhitavate rataste pöörlemisele.
Kui vastupanu esirataste pööramisele suureneb, suureneb rõhk hüdrovõimendi silindri tööõõnes. Samal ajal suureneb ka rõhk reaktiivkolbide all. Vedrude ja reaktiivkolbide survel kipub pool pöörduma tagasi keskasendisse.
Autot juhtides säilib juhil alati teetunnetus, st rooli keeramiseks peab ta veidi pingutama.
Esirataste pööramise takistuse suurenemisega ja rõhu suurenemisega hüdrovõimendi silindri õõnsuses suureneb ka roolile mõjuv jõud.
Roolile avalduva löögi lõppedes liigub pool keskasendisse, selle silindri õõnsuse ühendus tühjendustoruga peatub ja rõhk selles langeb.
Keskmises asendis on aksiaalne kliirens kolviraami ja käigukasti vahel väikseim. Kui rooli keeratakse paremale ja vasakule, suureneb kliirens selle lülituse korral.
Kui mootor ei tööta ja roolivõimendi pump ei varusta vedelikku, töötab roolimehhanism normaalselt, kuid juht peab sõiduki juhtimiseks rohkem pingutama.
Rooliseadme korpuse alumises osas asub tühjenduskork magnetiga, püüdes kinni vedelikku langevad metalliosakesed.
Minski autotehase autodel kasutati kruvikuulmutri tüüpi roolimehhanismi, millel oli eraldi hüdrovõimendi.
Kahele koonusrull-laagrile paigaldatud rooliseadme võllil on kruvi, mida mööda hammaslati mutter liigub. Mutri välispinnale on lõigatud rööp, mis haakub võlli hammastega sektoriga. Mutri lihtsamaks liigutamiseks tehakse sellesse ja kruvisse poolringikujulised spiraalsed sooned, mis moodustavad kuulidega täidetud spiraalse kanali. Kuulide soontest väljakukkumist takistab stantsitud juhikute paigaldamine mutri soontesse, moodustades torukujulise soone. Sellel rennil, kui kruvi keerata, veerevad kuulid, väljudes mutri ühelt küljelt ja naastes teiselt poolt.
Hammasratta võll on paigaldatud kolmele nõellaagrile, millest kaks asuvad bipodi kinnituse küljel. Viie hambaga sektor haakub hammaslati hammastega. Sektori keskmine hammas on teistest mõnevõrra jämedam. Sektorvõlli ühes otsas on tehtud väikesed splinsid ühendamiseks roolihoovaga, mida hoiab mutter aksiaalse nihke eest. Sektorvõlli teises otsas on reguleerimisseade, mis võimaldab seada sektori-mutri haardumisel vajaliku aksiaalse kliirensi. See koosneb lukustusmutriga kinnitatud reguleerimiskruvist.
Roolimehhanismi karter on valatud malmist ja suletud külgedelt eemaldatavate tihenditega katetega. Roolivõlli ja sektorivõlli väljumiskohad karterist on tihendatud kummitihenditega. Karteri ülaosas on kork, mis sulgeb õli täiteava. Allosas on sama korgiga auk õli väljalaskmiseks.
KrAZ-i sõidukitele paigaldati varem roolimehhanism, mis koosneb ussist ja spiraalhammastega külgmisest käigukastist (praegu on selliseid sõidukeid töös palju) ning praegu kasutatakse mehhanismi kruvi ja kuulmutri kujul. -rack, st sama tüüpi, samuti Minski autotehase autodel, samuti eraldi hüdrovõimendiga.

Riis. 11. Autode MAZ roolimehhanism:
1 - sektori võll; 2 - täitekast; 3 - nõellaagrid; 4 - külgkate: 5 - kork äravooluava; 6 - reguleerimismutter; 7 - laager; 8 - rooliseadme korpus: 9 - mutter-siin; 10 - pallid; 11 - kruvi; 12 - täitekork; 13 - laager
To Kategooria: - Autode hooldus
Auto iga sõlm ja mehhanism on omal moel oluline. Võib-olla pole sellist süsteemi, ilma milleta auto saaks normaalselt töötada. Üks neist süsteemidest on roolimehhanism. See on ilmselt üks auto kõige olulisemaid osi. Vaatame, kuidas see sõlm on paigutatud, selle eesmärk, struktuurielemendid. Samuti saate teada, kuidas seda süsteemi reguleerida ja parandada.
Hammasratta ja hammasratta tööpõhimõte
Hammasrattaga rool
Hammaslatt-roolimehhanism on kõige levinum autodele paigaldatud mehhanismi tüüp. Roolimehhanismi peamised elemendid on käik ja roolilatt. Käigukast on paigaldatud rooli võllile ja on pidevas ühenduses roolilati (käigukastiga).
Skeem hammaslatt ja hammasratas
1 - liugelaager; 2 - kõrgsurve mansetid; 3 - poolide korpus; 4 - pump; 5 - kompensatsioonipaak; 6 – roolitõmme; 7 - roolivõll; 8 - rööp; 9 - survetihend; 10 - kaitseümbris.
Hammaslati ja hammasratta roolimehhanismi töö on järgmine. Kui rooli keerata, liigub hammaslatt vasakule või paremale. Racki liikumise ajal liiguvad selle külge kinnitatud roolivardad ja pööravad juhtrattaid.
Hammaslatt-roolimehhanism on disainilt lihtne ja selle tulemusel kõrge efektiivsusega ja sellel on ka kõrge jäikus. Kuid seda tüüpi roolimehhanism on tundlik tee ebatasasusest tulenevate löökide suhtes, mis on altid vibratsioonile. Tänu nende disainifunktsioonid kasutatakse hammaslatt-roolimist esirattaveoga sõidukid 
Ussikäik
Skeem ussikäikSee roolimehhanism on üks "vananenud" seadmetest. Need on varustatud peaaegu kõigi kodumaiste "klassika" mudelitega. Mehhanismi kasutatakse autodel, millel on murdmaa võime juhitavate rataste sõltuva vedrustusega, samuti väikeveokites ja bussides.
Struktuuriliselt koosneb seade järgmistest elementidest:
- roolivõll
- ussirulliga ülekanne
- karter
- roolihoob
Paar "ussirulli" on pidevas tegevuses. Globoidne uss on roolivõlli alumine osa ja rull on paigaldatud bipodi võllile. Rooli pööramisel liigub rull mööda ussi hambaid, mille tõttu pöörleb ka roolihoova võll. Selle interaktsiooni tulemuseks on translatsiooniliigutuste ülekandmine ajamile ja ratastele.
Rooliseade ussi tüüp on järgmised eelised:
- võimalus pöörata rattaid suurema nurga all
- põrutussummutus teel konarustest
- suurte pingutuste edastamine
- tagab masina parema manööverdusvõime
Konstruktsiooni valmistamine on üsna keeruline ja kallis - see on selle peamine puudus. Sellise mehhanismiga juhtimine koosneb paljudest ühendustest, mille perioodiline reguleerimine on lihtsalt vajalik. Vastasel juhul tuleb kahjustatud esemed välja vahetada.
Roolisammas
Teostab pöörlemisjõu ülekande, mille juht suuna muutmiseks tekitab. See koosneb sõitjateruumis asuvast roolist (juht toimib seda pöörates). See on jäigalt istutatud kolonni võllile. Selle rooliosa seadmes kasutatakse sageli mitmeks osaks jagatud võlli, mis on omavahel ühendatud kardaanliigenditega.
See disain ei ole lihtsalt tehtud. Esiteks võimaldab see muuta rooli nurka mehhanismi suhtes, nihutada seda teatud suunas, mis on sageli vajalik auto komponentide kokkupanemisel. Lisaks võimaldab see disain suurendada salongi mugavust – juht saab muuta rooli asendit ulatuse ja kalde osas, pakkudes kõige mugavamat asendit.
Teiseks kipub komposiit-roolisammas avarii korral "katki minema", vähendades sellega juhi vigastuste tõenäosust. Põhimõte on see, et laupkokkupõrke korral võib mootor tagasi liikuda ja roolimehhanismi lükata. Kui samba võll oleks kindel, tooks mehhanismi asendi muutmine kaasa võlli väljundi koos rooliga sõitjateruumi. Komposiitkolonni puhul kaasneb mehhanismi liikumisega ainult võlli ühe komponendi nurga muutumine teise suhtes ja sammas ise jääb liikumatuks.
Kruviga roolimehhanism
Kruviga roolimehhanism ühendab endas järgmisi konstruktsioonielemente: kruvi rooli võllil; mutter, mis liigub mööda kruvi; hammasratas, lõigatud pähkliks; hammastega sektor ühendatud rööpaga; juhthoob, mis asub sektori võllil.
Kruvi roolimehhanismi eripäraks on kruvi ja mutri ühendamine kuulide abil, millega saavutatakse vähem paari hõõrdumist ja kulumist.
Põhimõtteliselt on kruviga roolimehhanismi töö sarnane tiguülekande tööga. Rooli keeramisega kaasneb kruvi pöörlemine, mis liigutab sellele pandud mutrit. Sel juhul toimub pallide ringlus. Mutter käigukasti abil liigutab käigukasti ja koos sellega ka roolihooba.
Kruviga roolimehhanismil on võrreldes tiguülekandega suurem tõhusus ja see nõuab suuremaid jõupingutusi. Seda tüüpi roolimehhanism on paigaldatud üksikutel autodel juhtivklass, raskeveokid ja bussid.
Järeldus
Üldiselt on mehhanism üsna usaldusväärne seade, mis ei vaja hooldust. Kuid samal ajal eeldab auto rooli töö õigeaegset diagnostikat rikete tuvastamiseks.
Selle sõlme disain koosneb paljudest liikuvate liigenditega elementidest. Ja kus sellised ühendused on, tekivad aja jooksul kontaktelementide kulumise tõttu neisse lõtkud, mis võivad oluliselt mõjutada auto juhitavust.
Roolidiagnostika keerukus sõltub sellest disain. Nii et käigukasti mehhanismiga sõlmedes pole nii palju ühendusi, mida tuleks kontrollida: näpunäited, hammasrattaga käigu ühendamine, roolisamba universaalliigendid.
Kuid tiguülekandega on ajami keeruka konstruktsiooni tõttu palju rohkem diagnostikapunkte.
Mis puutub remonttöödesse koostu rikke korral, siis tõsise kulumise korral vahetatakse otsikud lihtsalt välja. Roolimehhanismis saab algstaadiumis lõtku eemaldada käigu reguleerimisega ja kui see ei aita, siis komplekti remondikomplektide abil uuesti kokku pannes. Kolonni kardaanid ja ka otsad vahetatakse lihtsalt välja.
Roolimehhanisme on mitut tüüpi.Te teate, et rooli keerates pöörduvad auto rattad. Kuid rooli keeramise ja rataste keeramise vahel toimuvad teatud toimingud.
Käesolevas artiklis vaatleme kahe enamlevinud rooliseadme tüübi omadusi: hammaslatt- ja kuulmutriga roolimehhanism. Räägime ka roolivõimendist ja õpime tundma huvitavaid tehnoloogiaid roolisüsteemide arendamiseks, mis võivad kütusekulu vähendada. Kuid kõigepealt vaatame, kuidas pööre toimub. Kõik pole nii lihtne, kui võib tunduda.
auto pööramine
 Võite olla üllatunud, kui teate, et pööramisel liiguvad esisilla rattad teist teed.
Võite olla üllatunud, kui teate, et pööramisel liiguvad esisilla rattad teist teed. Varustama sujuv pööre, peab iga ratas kirjeldama erinevat ringi. Tänu sellele, et sisemine ratas kirjeldab väiksema raadiusega ratast, teeb see tihedama pöörde kui välimine. Kui joonistate igale rattale risti, lõikuvad jooned keskmises pöördepunktis. Pöördegeomeetria põhjustab sisemise ratta pöörlemist rohkem kui välimist.
Roolimehhanisme on mitut tüüpi. Levinumad on hammaslatt- ja kuulmutrijuhtimine.
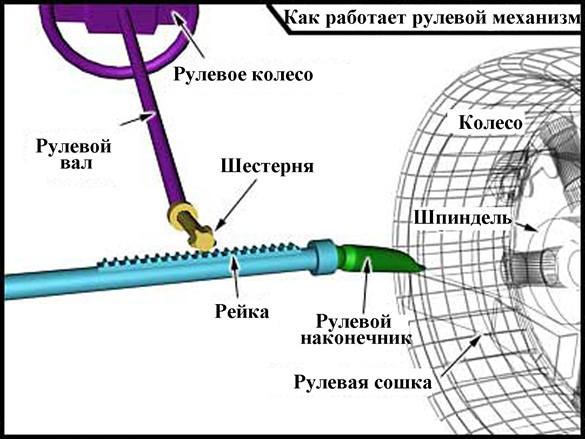
Hammasrattaga rool
 Hammasrattaga roolimist kasutatakse laialdaselt sõiduautodes, kergveokites ja maasturites. Tegelikult on see mehhanism üsna lihtne. Hammaslatt ja hammasrattad on paigutatud metalltorusse, mille mõlemalt küljelt ulatub välja hammaslatt. Rooliots ühendub raami mõlema küljega.
Hammasrattaga roolimist kasutatakse laialdaselt sõiduautodes, kergveokites ja maasturites. Tegelikult on see mehhanism üsna lihtne. Hammaslatt ja hammasrattad on paigutatud metalltorusse, mille mõlemalt küljelt ulatub välja hammaslatt. Rooliots ühendub raami mõlema küljega. Veoajam on ühendatud rooliseadme võlliga. Rooli keerates hakkab käik pöörlema ja paneb hammaslati liikuma. Lennuki otsas olev rooliots on ühendatud spindlil oleva roolihoovaga (vt joonist).
Hammasrattaga käigukasti funktsioonid on järgmised:
- See muudab rooli pöörleva liikumise lineaarseks liikumiseks, mis on vajalik rataste pööramiseks.
- See tagab rataste pööramise hõlbustamiseks ülekandearvu.
ülekandearv juhtimine on roolimise astme ja rataste pöörlemisastme suhe. Näiteks kui üks täispööre rool (360 kraadi) keerab ratast 20 kraadi, siis on rooli ülekandearv 18:1 (360 jagatud 20-ga). Mida kõrgem on suhe, seda suurem on juhitavus. Mida suurem suhe, seda vähem on vaja pingutada.
Tavaliselt kopsudes sportautod roolivahe on väiksem kui suured autod ja veoautod. Madala ülekandearvuga on roolile reageerimine kiirem, nii et te ei pea pöörde tegemiseks rooli sundima. Kuidas väiksem auto, seda väiksem on selle mass ja isegi väikese ülekandearvu korral ei nõua see pööramiseks täiendavaid jõupingutusi.
Leidub ka muudetava rooliülekandearvuga autosid. Sel juhul on hammaslattal ja hammasrattal erinev hammaste samm (hammaste arv tolli kohta) keskel ja külgedel. Tänu sellele reageerib auto roolile kiiremini (raam asub keskkohale lähemal) ning pingutus väheneb ka rooli keeramisel.
Roolilatt ja hammasratas
Hammaslati ja hammasrattaroolivõimendi olemasolul on hammaslatt veidi teistsuguse disainiga. Osa riiulist sisaldab silindrit, mille keskel on kolb. Kolb on raamiga ühendatud. Kolvi mõlemal küljel on kaks auku. Kõrgsurvevedeliku rakendamine kolvi ühele küljele paneb kolvi liikuma, see pöörab hammaslatti, andes roolimehhanismile toite.
Osa riiulist sisaldab silindrit, mille keskel on kolb. Kolb on raamiga ühendatud. Kolvi mõlemal küljel on kaks auku. Kõrgsurvevedeliku rakendamine kolvi ühele küljele paneb kolvi liikuma, see pöörab hammaslatti, andes roolimehhanismile toite. Kuulmutriga roolimehhanism
Kuulmutriga roolimehhanismi võib leida paljudel veoautodel ja maasturitel. See süsteem veidi erinev hammaslattmehhanismist.Kuulmutriga roolimehhanism sisaldab tiguülekannet. Tavaliselt võib tiguülekande jagada kaheks osaks. Esimene osa on metallplokk, millel on keermestatud auk. See plokk on väljastpoolt hambad, mis on ühendatud käiguga, mis käitab roolihooba (vt joonist). Ratasühendatud keermestatud vardaga, sarnaselt poldiga, mis on paigaldatud ploki keermestatud avasse. Kui rool pöörleb, pöördub polt koos sellega. Selle asemel, et kruvida plokki nagu tavalised poldid, on see polt fikseeritud nii, et kui see pöörleb, siis see juhib plokki, mis omakorda juhib tiguülekannet. 
Polt ei keerdu ploki sisse, kuna see on täidetud kuullaagritega, mis ringlevad läbi mehhanismi. Kuullaagrid kasutatakse kahel eesmärgil: need vähendavad hõõrdumist ja käigukasti kulumist ning vähendavad ka mehhanismi saastumist. Kui roolimehhanismis kuule pole, siis mõnda aega ei puutu hambad üksteisega kokku ja tunned, et rool on oma jäikuse kaotanud.
Kuulmutriga roolimehhanismis olev hüdrovõimendi toimib samamoodi nagu hammaslatt-roolimehhanismis. Tugevdamise tagab kõrge rõhu all oleva vedeliku tarnimine ploki ühel küljel.
Roolivõim

 Lisaks roolimehhanismile endale sisaldab hüdrovõimendi mitmeid põhikomponente.
Lisaks roolimehhanismile endale sisaldab hüdrovõimendi mitmeid põhikomponente. Pump
Labapump varustab roolimehhanismi hüdraulilise jõuga (vt joonist). Mootor käitab pumpa rihma ja rihmarattaga. Pump sisaldab süvistatud labasid, mis pöörlevad ovaalse kujuga kambris.Pöörlemisel tõukuvad terad välja hüdrovedelik madal rõhk tagasivoolutorust kõrgsurve väljalaskeavasse. Voolu tugevus sõltub auto mootori pöörete arvust. Pumba konstruktsioon tagab vajaliku rõhu ka tühikäigul. Selle tulemusena liigutab pump rohkem vedelikku, kui mootor töötab kõrgematel pööretel.
Pumbas on turvaventiil, mis tagab õige rõhu, mis on eriti oluline mootori kõrgetel pööretel, kui tarnitakse palju vedelikku.
pöörlev ventiil
Hüdrauliline võimendi peaks juhti aitama ainult roolile jõu avaldamisel (pööramisel). Pingutuse puudumisel (näiteks sirgjoonel sõites) ei tohiks süsteem abi osutada. Seadet, mis määrab roolile jõu rakendamise, nimetatakse pöördventiiliks.Pöördventiili põhikomponent on torsioonvarras. Torsioonvarras on õhuke metallvarras, mis pöörleb pöördemomendi mõjul. Väändevarda ülemine ots on ühendatud rooliga ja alumine ots käiguga või ussikäik(mis pöörab rattaid), samas kui väändevarda pöördemoment on võrdne pöördemomendiga, mida juht rakendab rataste pööramiseks. Mida suurem on rakendatud pöördemoment, seda suurem on väändevarda pöörlemine. Rooliseadme võlli sisendosa moodustab pöörleva klapi sisemise osa. See on ühendatud ka väändevarda ülaosaga. Väändevarda alumine osa on ühendatud pöördklapi välimise osaga. Väändevarras pöörab ka roolimehhanismi, sobitades seda olenevalt rooliseadme tüübist veo- või tiguülekandega.
Pööramisel pöörab torsioonvarras pöörleva klapi sisemist osa, välimine osa jääb paigale. Tänu sellele, sisemine osa klapp on ühendatud ka roolivõlliga (ja seega ka rooliga), klapi sisemuse pöörete arv sõltub juhi poolt rakendatavast pöördemomendist.
Kui rool on paigal, annavad mõlemad hüdrotorud käigukastile võrdse rõhu. Aga kui klapp on keeratud, siis kanalid avanevad, et anda vastavasse torusse kõrge rõhu all vedelikku.
Praktika on näidanud, et seda tüüpi roolivõimendi ei ole kõige tõhusam.
Uuenduslik roolivõimendi
Kuna enamiku sõidukite roolivõimendi pump pumpab pidevalt vedelikku, kulutab see voolu ja kütust. Loogiline on arvestada mitmete uuendustega, mis parandavad kütusesäästu. Üks edukamaid ideid on arvutiga juhitav süsteem. See süsteem kõrvaldab täielikult mehaanilise ühenduse rooliratta ja roolimehhanismi vahel, asendades selle elektrooniline süsteem juhtimine.Tegelikult töötab rool samamoodi nagu rool Arvutimängud. Rool varustatakse anduritega, mis annavad autole signaale rataste ja mootorite liikumissuuna kohta, mis reageerivad auto tegevusele. Nende andurite väljundit kasutatakse roolivõimendi juhtimiseks. Sel juhul kaob vajadus roolivõlli järele, mis suureneb vaba ruum mootoriruumis.
General Motors tutvustas ideeautot Hy-wire, kuhu on selline süsteem juba paigaldatud. Iseloomulik omadus selline GM-i elektrooniliselt juhitav süsteem on see, et saate uue arvuti abil ise reguleerida auto juhitavust tarkvara mehaanilisi komponente vahetamata. Elektrooniliselt juhitavatel tulevikuautodel saab mõne nupuvajutusega juhtimissüsteemi enda maitse järgi kohandada. Kõik on väga lihtne! Viimase viiekümne aasta jooksul pole roolisüsteem palju muutunud. Järgmisel kümnendil on aga näha kütusesäästlikumate autode ajastut.
Sõidu ajal tunneb juht pidevat vajadust kontrollida autot ja teed. Väga sageli on vajadus muuta liikumisviisi: parklasse sisenemine või sealt lahkumine, sõidusuuna muutmine (pööramine, pööramine, ümberehitamine, edasiliikumine, möödasõit, ümbersõit, liikumine vastupidi jne), peatumine või parkimine. Nende toimingute teostamise tagab auto juhtimine, mis on üks kõige olulisemaid süsteeme sõidukit.
Üldine seade ja tööpõhimõte
Üldine rooliseade, vaatamata suurele hulgale komponentidele ja koostudele, tundub olevat üsna lihtne ja tõhus. Logistikat ning süsteemi disaini ja toimimise optimaalsust tõestab vähemalt see, et autotööstuse aastatepikkuse teooria ja praktika jooksul pole roolisüsteemis toimunud globaalseid olulisi muutusi. Esialgu sisaldab see kolme peamist alamsüsteemi:
- roolisammas, mis on ette nähtud rooli pöörleva liikumise edastamiseks;
- rooliseade - seade, mis muudab rooli pöörlevad liikumised ajamiosade translatsiooniliigutusteks;
- rooliseade, eesmärgiga viia juhtfunktsioonid pöörlevatele ratastele.
Lisaks peamistele alamsüsteemidele on raskeveokitel, süstikutel ja paljudel kaasaegsetel autodel spetsiaalne roolivõimendi, mis võimaldab kasutada loodud jõuefekti, hõlbustades selle liikumist.
Seega on rooliskeem üsna lihtne ja funktsionaalne. Rool kui esmane üksus, mis on igale juhile hästi teada, teeb tema mõtete ja jõu mõjul pöörlevaid liigutusi vajalikus suunas. Need liigutused edastatakse roolivõlli abil spetsiaalsele roolimehhanismile, kus pöördemoment muudetakse tasapinnalisteks liikumisteks. Viimast läbi sõiduraporti soovitud nurgad roolid. Pneumaatilised, hüdraulilised, elektrilised ja muud võimendid (kui neid on) omakorda hõlbustavad rooli pöörlemist, muutes sõiduki juhtimise protsessi mugavamaks.
See on põhiprintsiip, mille järgi auto juhtimine töötab.
Roolisammas
Juhtimisskeem sisaldab tingimata kolonni, mis koosneb järgmistest osadest ja koostudest:
- rool (või rool);
- kolonni võll (või võllid);
- korpuse (toru) kolonn laagritega, mis on ette nähtud võlli (võllide) pööramiseks;
- kinnitusvahendid konstruktsiooni liikumatuse ja stabiilsuse tagamiseks.
Kolonni tööskeem seisneb juhi jõu rakendamises roolile ja sellele järgnevas rooli suund-pöörlevate liikumiste edastamises kogu süsteemile, kui juht soovib auto liikumisrežiimi muuta.
Rooliseade
Iga auto roolimehhanism on viis, kuidas muuta samba pöörlemine rooliseadme translatsiooniliigutusteks. Teisisõnu, mehhanismi funktsioonid taandatakse selleni, et rooli pöörded muutuksid varraste ja loomulikult rataste vajalikeks liigutusteks. 
Roolimehhanism on muutuv. Praegu esindavad seda kaks põhiprintsiipi - uss ja hammaslatt, mis erinevad pöördemomendi teisendamise viisist.
Ussi tüüpi roolimehhanismi üldine paigutus sisaldab:
- paar osa "ussirull";
- nimetatud paari karter;
- roolihoob.
Roolivõim
Juhtimine kaasaegsed autod varustatud spetsiaalsega lisavõimalus- võimendi. Roolivõimendi on alamsüsteem, mis koosneb mehhanismist, mis võib oluliselt vähendada juhi pingutusi rooli keeramisel ja sõitmisel. 
Roolivõimendi peamised tüübid on järgmised:
- pneumaatiline võimendi (kasutades suruõhu jõudu);
- hüdrauliline võimendi (põhineb spetsiaalse vedeliku rõhu muutusel);
- elektrivõimendi (töötab elektrimootori baasil);
- elektrohüdrauliline võimendi (rakendades kombineeritud tööpõhimõtet);
- mehaaniline võimendi (suurendatud ülekandearvuga spetsiaalne mehhanism).

Algselt kasutati võimendussüsteemi suure võimsusega ja suurte seadmete puhul. Siin ei piisanud juhi lihasjõust kavandatud manöövri sooritamiseks. Kaasaegsetes sõiduautodes kasutatakse neid mugavuse pakkumise vahendina ruleerimisel.
Juhtimissüsteemi toimimise alused
Auto töötamise ajal muutuvad roolisüsteemi kuuluvad üksikud komponendid ja sõlmed järk-järgult kasutuskõlbmatuks. Eriti süveneb see halva kvaliteediga teedel liikumise tingimustes. Süsteemi kulumisele aitab kaasa ka juhi vähene tähelepanu rikete ennetamisele. madala kvaliteediga varuosad ja tarvikud. Viimase rolli ei mängi teenindajate madal kvalifikatsioon, kellele juht usaldab oma auto hooldamise.
Sõiduki juhtimissüsteemi tähtsus tuleneb nõuetest üldine turvalisus liiklust. Niisiis keelavad "Sõiduki kasutuselevõtu põhisätete ..." ja SDA punkti 2.3.1 normid kategooriliselt sõidukil liikumise (isegi autoteenindusse või parkimiskohta), kui tal on rikkeid. roolisüsteem. Need vead hõlmavad järgmist:
- üleliigne vabakäik rooli (tagasilöögi) (10 kraadi jaoks autod, 25 - veoautodele, 20 - bussidele);
- juhtsüsteemi liikuvad osad ja sõlmed, mida tootja ei ole tarninud;
- keermestatud ühenduste lõtvuse olemasolu;
- roolivõimendi ebapiisav töö.
See vigade loetelu ei ole aga ammendav. Lisaks neile on süsteemis ka teisi "populaarseid" vigu:
- rooli raske pöörlemine või kinnijäämine;
- koputamine või löömine, rooli sisse andmine;
- süsteemi lekked jne.
Selliseid rikkeid peetakse auto töötamise ajal vastuvõetavaks, kui need ei põhjusta eelnevalt märgitud süsteemi puudusi.
Tehke kokkuvõte. Rool on kaasaegse sõiduki disaini üks olulisemaid komponente. See nõuab pidevat seisukorra jälgimist ning õigeaegse ja kvaliteetse teeninduse ja hoolduse teostamist.
Loeng 14. Juhtimine.
Juhtimisülesanne.
Rool tagab autole vajaliku liikumissuuna. Rool sisaldab roolimehhanismi, mis edastab jõu juhilt rooliseadmele, ja rooliseadet, mis edastab jõu rooliseadmelt juhitavatele ratastele. Iga juhitav ratas on paigaldatud teljele ( sõrmenukk) 13 (joon. 1) ühendatud talaga 11 pin sild 8 . Kuningtihvt on fikseeritud tala külge ning selle ülemine ja alumine ots sisenevad pöördetihvti kõrvadesse. Käigu pööramisel kangist 7 see koos sellele paigaldatud juhitava rattaga pöörleb ümber kuningtihvti. Pöördtihvtid on omavahel ühendatud hoobadega 9 ja 12 ja põiki veojõud 10 . Seetõttu pöörlevad juhitavad rattad samaaegselt.
Riis. 1. Rooliskeem
Juhtrattad pööratakse rooli keerates 1 . Sellest edastatakse pöörlemine läbi võlli 2 ussi peal 3 , mis tegeleb sektoriga 4 . Sektorvõllile on kinnitatud bipod 5 , keerates läbi pikisuunalise tõukejõu 6 ja kang 7 teljed 13 juhitavate ratastega.
Ratas 1 , võll 2 , uss 3 ja sektor 4 moodustama roolimehhanismi, mis suurendab juhi poolt roolile rakendatavat momenti, et pööratavad rattad. bipod 5 , pikisuunaline tõukejõud 6 , võimendus 7 , 9 ja 12 pöörlevad tihvtid ja ristvarras 10 moodustavad rooliajami, mis edastab jõu bipodilt mõlema juhitava ratta tihvtidele. põiklüli 10 , võimendus 9 ja 12 , tala 11 moodustavad roolitrapetsi, tagades vajaliku suhte juhitavate rataste pöördenurkade vahel.
Juhtrattad pöörlevad läbi piiratud nurga, tavaliselt 28–35º. Seda tehakse selleks, et rattad ei puutuks keerates kokku raami, poritiibade ja muude auto osadega.
Mõnel sõidukil on roolimine abistatud, et hõlbustada juhitavate rataste pööramist.
Juhtrataste stabiliseerimine.
Autole mõjuvad jõud kalduvad juhitavaid rattaid sirgjoonelisele liikumisele vastavast asendist kõrvale kalduma. Selleks, et vältida rataste pöörlemist juhuslike jõudude mõjul (põrutused tee konarustest, tuuleiilid jne), peavad juhitavad rattad säilitama sirgjoonelisele liikumisele vastava asendi ja pöörduma sellesse mistahes muust asendist tagasi. . Seda võimet nimetatakse rooliratta stabiliseerimiseks. Rataste stabiliseerimise tagab tihvti kalle rist- ja pikitasandil
ja õhkrehvi elastsed omadused.
Rooliseadme disain.
Ussirulliga rooliseade näidatud joonisel fig. 2, valmistatud globoidse ussi kujul 5 ja sellega haakunud kolmeharjaline rull 8 . Uss on paigaldatud malmist karterisse 4 kahel koonusrull-laagril 6 . Mõlema laagri rullikute jooksulindid on valmistatud otse ussi külge. Ülemine laagri välimine rõngas surutakse karteri korpusesse. Alumise laagri välimine rõngas, mis on paigaldatud karteriistmesse, toetub kaanele 2 poltidega karteri külge kinnitatud. Katte äärikute alla asetatakse tihendid 3 erineva paksusega laagri eelkoormuse reguleerimiseks.
Ussil on kihid, millega see võllile surutakse. Võlli karterist väljumiskohta on paigaldatud õlitihend. Lameda võlli ülemine osa siseneb kardaaniliigendi ääriku auku 7 , kus see on kinnitatud kiiluga. Läbi universaalliigend roolipaar on ühendatud rooliga.
Võll 9 bipod paigaldatakse karterisse läbi külgseinas oleva akna ja suletakse kaanega 14 . Võlli toetavad kaks karterisse ja kaanesse surutud puksi. Kolme harja rull 8 asetatud kahejalgse võlli pea soonde teljele kahe abil rull-laagrid. Rulli mõlemal küljel asetatakse selle teljele poleeritud terasest seibid. Bipodi võlli liikumisel muutub rulliku ja ussi telgede vaheline kaugus, mis võimaldab reguleerida haardumise vahet.

Riis. 2. Auto KAZ-608 "Colchis" roolimehhanism
Võlli otsas 9 lõigatakse kitsenevad pilud, mille külge kinnitatakse juhthoob mutriga 1 . Võlli väljalaskeava karterist on tihendatud õlitihendiga. Roolihoova võlli teises otsas on rõngakujuline soon, millesse suruseib tihedalt sobib. 12 . Seibi ja katte otsa vahele 14 seal on tihendid 13 kasutatakse rulli ja ussiga haardumise reguleerimiseks. Seibide komplektiga tõukeseib kinnitatakse karteri kaanele mutriga 11 . Mutri asend fikseeritakse korgiga 10 poltidega kaane külge kinnitatud.
Kliirens rooliseadme sisselülitamisel on muutuv: minimaalne, kui rull on ussi keskosas, ja suureneb, kui rooli keeratakse ühes või teises suunas.
Selline kliirensi muutmise olemus uues rooliseadmes võimaldab korduvalt taastada vajalikku kliirensit keskel, kõige enam ussi kulumistsoonis ilma ussi servade kinnikiilumise ohuta. Sarnaseid rooliseadmeid kasutatakse GAZ, VAZ sõidukitel, millel on erinevus ussihaardumise reguleerimismehhanismis 5 rulliga 8 .
Hammasrattaga rool(Joonis 3, a). Rooli keerates 1 käik 2 liigutab rööpa 3 , millest kandub jõud üle roolivarrastele 5 . Pöördvarraste kinnitusvardad 4 keerake juhitavaid rattaid. Hammaslatt-roolimehhanism koosneb spiraalsest hammasrattast 2 , hakitud võllile 8 (Joonis 3, b) ja spiraalne hammas 3 . Võll pöörleb karteris 6 peal tõukejõu laagrid 10 ja 14 , mille tihedust teostab rõngas 9 ja ülemine kaas 7 . Rõhuasetus 13 , surutud vedru poolt 12 rööpale, tajub rööpale mõjuvaid radiaaljõude ja kannab need üle külgkattele 11 , mis saavutab paari kaasamise täpsuse.

Riis. 3. Hammasrattaga juhtimine:
a– rooli skeem; b- hammaslatt-rool
Kruviraamiga roolimehhanism(joonis 4) on kaks tööpaari: kruvi 1 koos pähkliga 2 ringlevate pallide peal 4 ja kolbsiiniga 11 , mis on seotud püügivahendite sektoriga 10 bipodi võll. Rooliülekande suhe 20:1. Kruvi 1 roolimehhanismil on suure täpsusega “kaarekujulise” profiilpinnaga spiraalne soon. Mutrisse tehakse sama soon 2 . Kruvist ja mutrist moodustatud kruvikanal täidetakse kuulidega. Mutter on jäigalt fikseeritud korgiga kolvi siini sees.
 |
Riis. 4. Rooliseade koos sisseehitatud hüdrovõimendiga:
a- seade; b- töö skeem; 1 - kruvi; 2 - kruvi; 3 - vihmaveerenn; 4 - pall; 5 – roolivõll;
6 – juhtventiili korpus; 7 - pool; 8 - bipod; 9 - kahejalgse võll; 10 - püügivahendite sektor; 11 - kolbsiin; 12 - karter-silinder; 13 - karter; JA ja B- silindri õõnsused;
AT ja G– õli sisse- ja väljalaskevoolikud; D ja E- kanalid.
Kruvi keerates 1 roolilt väljuvad kuulid mutri ühelt küljelt soonde 3 ja pöörduge mööda seda mutri teisel küljel oleva kruvi soonte juurde.
Rack ja käigukastil on muutuva paksusega hambad, mis võimaldab reguleerida hammaslatisektori ülekande vahet rooliajami korpuse küljekaanesse keeratud reguleerimiskruviga. Kolbsiinile on paigaldatud elastsed poolitatud malmrõngad, mis tagavad selle tiheda sobitumise karteri silindrisse 12 . Roolivõlli pöörlemine muudetakse kruvil oleva mutri liikumise tõttu kolviraami translatsiooniliseks liikumiseks. Selle tulemusena pööravad kolviraami hambad sektorit ja koos sellega ka võlli 9 bipodiga 8 . Korpuses roolikasti ees 6 juhtventiil koos paigaldatud pooliga 7 . Vooliku juhtventiiliga AT ja G roolivõimendi pump ühendatud.
Kui auto liigub sirgjooneliselt, on pool keskmises asendis (nagu näidatud joonisel 4) ja õli pumbast läbi vooliku G läbi juhtklapi pumbatakse vooliku kaudu tagasi paaki AT. Rooli vasakule keerates pool 7 liigub edasi (joonisel vasakule) ja avab õli juurdepääsu õõnsusele JA kanali järgi D, ja õõnsusest B õli lähebõõnsusse AT ja pumba sisse. Tänu sellele on ratast lihtsam vasakule pöörata. Kui juht lõpetab rooli keeramise, liigub juhtventiili pooli keskasendisse ja roolirataste pööramise nurk jääb muutumatuks.
Rooli paremale keerates pooli kruvi 7 liigub tagasi (parempoolsel joonisel) kolviraami hammaste ja sektori koosmõjul. Tagasi liikudes avab pool õli juurdepääsu õõnsusele B kanali kaudu E. Kolvisiinile mõjuva õlisurve tulemusena väheneb rooli keeramiseks vajalik pingutus. Sel juhul pöörleb roolihoob vastupäeva.
Rooliseade.
rooli trapets(joonis 5). Olenevalt paigutusvõimalustest paigutatakse roolihoovastik esitelje ette (eesmine roolihoovastik) või selle taha (tagumine roolihoovastik). Sõltuva rattavedrustuse korral kasutatakse tugeva põiklüliga trapetse; sõltumatu vedrustusega - ainult tükeldatud põiklüliga trapets, mis on vajalik juhitavate rataste spontaanse pöörlemise vältimiseks, kui sõiduk vibreerib vedrustusel. Selleks tuleb poolitatud roolivarda liigendid paigutada nii, et sõiduki vibratsioon ei põhjustaks nende pöörlemist pöördtahvlite suhtes. Erinevate roolitrapetside skeemid on näidatud joonisel fig. üheksa.
 |
Riis. 5. Roolitrapetsi skeemid
Sõltuva ja sõltumatu vedrustusega saab neid kasutada tagumisena (joonis 9, a) ja esiosa (joonis 9, b) trapetsikujuline.
Joonisel fig. üheksa, sisse – e on toodud erineva hingede arvuga sõltumatute vedrustuste tagumised trapetsid.
Sõltuva vedrustusega roolimehhanismide konstruktsioon. Rataste pööramisel liiguvad roolimehhanismi osad üksteise suhtes. Selline liikumine toimub ka siis, kui ratas sõidab üle tee konaruste ja kui kere rataste suhtes võngub. Luua ajamiosade suhtelise liikumise võimalus horisontaalsel ja vertikaalsel tasapinnal samaaegselt usaldusväärne ülekanne jõududega, toimub ühendus enamikul juhtudel kuulliigendite abil.
Pikisuunaline veojõud 1 (Joonis 6, a) on tehtud torukujuline, servades on kumerused kahe hinge osade paigaldamiseks. Iga liigend koosneb tihvtist 3 , kreekerid 4 ja 7 , mis katab sfääriliste pindadega sõrme kuulpea, vedrud 8 ja piiraja 9 . Pistiku pingutamisel 5 sõrmepea on kreekeritega kinnitatud ja vedru 8 kahaneb. Pöördvedru hoiab ära lõtku kulumise ja pehmendab ratastelt rooliseadmele ülekantavaid lööke. Piiraja takistab vedru liigset kokkusurumist ja purunemisel ei lase sõrmel vardaga ühendusest välja tulla. Vedrud paiknevad sõrmede suhtes veojõus 2 ja 3 nii, et vedrude kaudu kanduvad üle vardale nagu bipodi mõjuvad jõud 6 , ja pöördhoovast.
 |
Riis. 6. Auto GAZ roolivardad:
a- pikisuunaline; b- põiki
Põikisuunalises pikivarras asetatakse hinged varda otste külge kruvitud otstesse. Varda otstes olevad niidid on tavaliselt nikerdatud suunaga. Seetõttu on tõukejõu pöörlemine 10 (Joonis 6, b) fikseeritud otstega 11 saate selle pikkust muuta, reguleerides rataste sissetungi. Sõrmed 15 jäigalt kinnitatud pöördtihvtide hoobadesse. Sõrme kuulipinda surub eelnevalt kokku surutud vedru 12 läbi kanna 13 kreekerisse 14 paigaldatud varda otsa sisse. Selline hingeseade võimaldab teil jõudu otse sõrmelt vardale ja edasi kanda vastupidine suund. Kevad 12 tagab liigendi kulumisest tekkiva pilu kõrvaldamise. Seega on põiklülide ja pikisuunaliste lülide liigendite peamine erinevus selles, et esimestes puuduvad vedrud, mille kaudu jõud otse rooliseadmes edasi kanduvad.
Roolivarda liigendeid määritakse määrdeliitmike kaudu. Mõnel autol hingedega määrdeaine paigaldatakse monteerimise ajal ja seda ei pea töötamise ajal täiendama.
Juhtrataste sõltumatu vedrustusega rooliajamite omadused ( riis. 7 ) . Sõltumatu vedrustusega rooliajam peab välistama iga ratta suvalise pöörlemise eraldi, kui see kõikub vedrustusel. Selleks on vajalik, et ratta ja veovarda võnketelg langeks võimalikult täpselt kokku, mis saavutatakse poolitatud põikvarda abil. Selline varras koosneb liigendosadest, mis liiguvad koos ratastega üksteisest sõltumatult.

Riis. 7. Sõltumatu vedrustusega rooliseadme skeem:
1 - seisma; 2 - pöördtihvtid; 3 – pöördtihvti hoob; 4 ja 9 – külgveojõud;
5 - pendli hoob; 6 - bipod; 7 - roolimehhanism; 8 - keskmine veojõud.
Sarnane teave.



